1.3.2 连续系统的数字PID控制仿真
本方法可实现D/A及A/D的功能,符合数字 实时控制的真实情况,计算机及DSP的实时 PID控制都属于这种情况。
采用MATLAB语句形式进行仿真。被控对象 为一个电机模型传递函数: G(s) 1 Js2 Bs 式中,J=0.0067,B=0.10
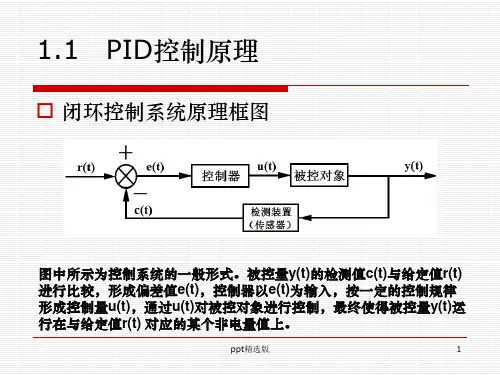
1.2 连续系统的基本PID仿真
1.2.1 基本的PID控制 1.2.2 线性时变系统的PID控制
1.2 连续系统的基本PID仿真
以二阶线性传递函数为被控对象,进行模拟 PID控制。在信号发生器中选择正弦信号,仿真 时取Kp=60,Ki=1ID的算法: u (k) u (k) u (k 1 )
u ( k ) k p ( e ( k ) e ( k 1 ) ) k i e ( k ) k d ( e ( k ) 2 e ( k 1 ) e ( k 2 ) )
1.3.4 增量式PID控制算法及仿真
式中,Ki=Kp/Ti,Kd=KpTd,T为采样周期,K 为采样序号,k=1,2,……,e (k-1)和e (k) 分别为第(k-1)和第k时刻所得的偏差信号。
1.3.1 位置式PID控制算法
位置式PID控制系统
1.3.1 位置式PID控制算法
根据位置式PID控制算法得 到其程序框图。
在仿真过程中,可根据实 际情况,对控制器的输出 进行限幅:[-10,10]。
1.3.2 连续系统的数字PID控制仿真
Simulink仿真程序图
1.3.2 连续系统的数字PID控制仿真
PID正弦跟踪结果
1.3.3 离散系统的数字PID控制仿真
仿真实例 设被控制对象为:
G(s)