堆取料机结构及工作原理培训
- 格式:ppt
- 大小:11.51 MB
- 文档页数:40

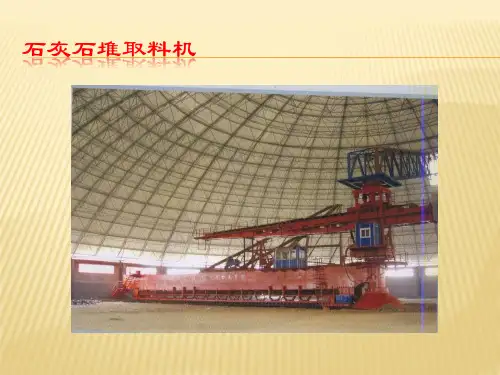
堆取料机操作培训教材1、堆取料机的工作机构组成:由斗轮机构、上部金属结构、悬臂胶带机、主机梯子平台、主机俯仰液压装置、门座、支承铰座、转盘、中部料斗、回转机构、限位装置、检测装置、行走机构、集中润滑系统,动力电缆卷筒装置、控制电缆卷筒装置、尾车、电缆悬挂装置、尾车梯子平台、电气室、电气系统、司机室、厂牌、配重组、基础布置及载荷等组成。
2、DQ600/1000.30堆取料机型,其含义为:D——堆料;Q——取料;600——取料出力600吨/小时;1000——堆料出力1000吨/小时;30——斗轮机构到设备回转中心的回转半径为30米。
3、DQ600/1000.30型堆取料机主要技术参数:(1)行走机构行走速度:工作速度:5m/min; 调车速度:15m/min轴距与轨距:6米×6米电动机功率:4×7.5kw减速机型号:MT0501.b.1(2)回转机构回转半径:30米回转速度:~0.12m/min回转角度:堆料角度:±110度;取料角度:±110度(3)斗轮机构出力:600t/h 斗轮外径:φ5200mm斗轮转速:6.5r/min 料斗容积:0.21m料斗数量:9只(4)仰俯机构仰俯角度:上仰12.8度,下俯13.8度变幅速度:~4m/min(斗轮中心处)液压缸型号:DG-JB25E-E1-L2(5)悬臂胶带机输送能力:1000t/h 带宽×带速:1200mm×2.5m/s电动机型号:Y225M-4 电动机功率:45kw4、二期堆取料机的型号:二期堆取料机采用的是DQ5030型,堆煤能力为1000t/h,取煤能力为600t/h。
5、炼焦煤贮存天数规定:煤种机械化煤场煤库、煤仓弱粘结80天90天1/3焦煤、肥煤90天100天焦煤、瘦煤120天120天6、堆取料机安全使用规则(1) 严禁超越规定的堆、取料能力,仰俯角度范围,回转角度范围等其他限位所控制的范围进行工作。

堆取料机工作原理(一)堆取料机工作原理解析1. 什么是堆取料机?堆取料机是一种自动化设备,通常用于自动堆料和提取料物。
它结合了机械、电气和控制技术,能够高效地完成物料堆放、取料的任务。
2. 堆取料机的组成部分堆取料机通常由以下几个主要组成部分组成:•输送系统输送系统是堆取料机的核心部分,它负责将物料从一个地方输送到另一个地方。
通常采用的方式有链板输送、皮带输送等。
通过控制输送系统的运行速度和方向,可以实现物料的精确堆放和提取。
•堆垛系统堆垛系统是用来控制堆放和提取物料的部分。
它通常由一个或多个起重机构、传感器和控制系统组成。
起重机构负责将物料从输送系统上提升到指定的位置,传感器用来检测物料的位置和状态,控制系统则根据传感器的反馈信号来控制起重机构的运行,实现精确的堆放和提取。
•控制系统控制系统是堆取料机的大脑,它负责监控和控制整个机器的运行。
控制系统由电气元件、PLC(可编程逻辑控制器)和人机界面组成。
电气元件用来提供电力和信号的传输,PLC负责接收并处理控制指令,人机界面则提供了操作界面供操作员与机器进行交互。
3. 堆取料机的工作过程堆取料机的工作过程通常可以分为以下几个步骤:• 1. 获取任务通过人机界面或外部设备下发任务,堆取料机接收到任务后开始执行。
• 2. 输送物料根据任务要求,堆取料机启动输送系统将物料从指定位置输送到目标位置。
输送系统根据控制系统的指令,控制输送带的运行速度和方向,确保物料准确到达目标位置。
• 3. 堆放物料当物料到达目标位置后,堆垛系统开始工作。
起重机构根据控制系统的指令,将物料从输送系统上提升到指定的高度,然后将其放置在指定的位置上。
通过传感器的反馈信号,控制系统可以实时监测物料的位置和状态,确保堆放的准确性。
• 4. 提取物料当需要提取物料时,堆取料机根据任务要求启动堆垛系统。
起重机构根据控制系统的指令,将需要提取的物料从指定位置上提升到合适的高度,然后将其放置在输送系统上,准备运送到目标位置。
堆取料机结构及工作原理培训前言随着物流行业的不断发展,名称奇特的物流设备开始出现在我们的视野中。
其中一种叫做堆取料机,只需轻响几下按钮就可以方便地进行存货、取货、转移等操作,不仅在加速物流业的发展,同时也极大的方便了我们的生活。
在本文中,我们将会对堆取料机的结构和工作原理进行详细的介绍。
一、堆取料机的结构1. 底盘底盘是堆取料机的基础组件,它负责承载各组件和货物。
底盘通常由钢板制成,表面经过大功率冲剪机器的加工与弯折后,然后经过喷涂或镀锌等方法防止地面及天气对钢材的氧化。
底盘的强度和稳定性非常重要,确保了堆取料的安全运行和操作的稳定性。
2. 控制器控制器是堆取料机的核心组件,它根据操作者的指令来控制车辆的运动轨迹和有关设备的操作。
现代的控制器通常有微型计算机、传感器和行进控制装置等元件组成,通过这些装置发挥的作用使堆取料机的操作更加准确、精湛。
3. 叉臂顾名思义,叉臂就是容器之间用来托运货物的臂状结构,负责将货物从一个位置转移到另一个需要将货物放置的位置。
叉臂的强度和耐用性对堆取料机的操作和运行稳定性也很重要。
4. 固定架固定架是支撑叉臂和衬板的重要部件。
固定架是维护堆取料机中其它部件的重要支撑,它的位置一般在桶体的上方,但与控制器和底盘相连通常更牢固。
5. 衬板堆取料机的最后一个组成部分是衬板,它是固定架下的工作面,也是搬运货物可靠地进行的平台。
衬板也负责支撑货物和叉臂,确保顺利的物流操作。
二、堆取料机的工作原理堆取料机的工作原理与传统物流设备有着很大的不同。
在控制器的指令下,堆取料机由底盘移动到货物位置。
叉臂从堆放区出去接货,在取货后叉臂抬高,然后向另一个需要存放货品的区域移动。
叉臂移到所需位置后就把货物扔进桶内。
储存和提取货物的过程可以进行无数次,令物流操作更加高效和便捷。
总结本文对堆取料机的结构和工作原理进行了详细的介绍。
要注意的是,这种设备具有很高的安全性和稳定性,这一点也是我们在使用堆取料机时需要特别注意的问题。