[电子教案(PPT版本)]“飞思卡尔”杯智能汽车设计与实例教程 (3)[72页]
- 格式:ppt
- 大小:7.39 MB
- 文档页数:72
飞思卡尔智能车竞赛设计⽅案“神马”队设计⽅案摘要本⽂以“飞思卡尔”杯全国⼤学⽣智能车竞赛为主题,介绍了智能赛车从机械结构设计到控制系统的软硬件设计流程。
本次⽐赛使⽤竞赛秘书处统⼀指定的竞赛车模及套件,采⽤飞思卡尔半导体公司的16位微控制器作为核⼼控制单元,配合不同类型的传感器、驱动电机、转向舵机、直流电池、以及相应的驱动电路,使赛车能够⾃主识别路径,并控制模型车⾼速稳定地在跑道上运⾏,在规定时间内完成跑完赛道的任务。
第⼀章背景1.1“飞思卡尔”杯背景介绍“飞思卡尔”杯全国⼤学⽣智能车竞赛是在飞思卡尔半导体公司资助下举办的以S12 单⽚机为核⼼的⼤学⽣课外科技竞赛。
使⽤⼤赛组委会统⼀提供的竞赛车模、转向舵机、直流电机和可充电式电池,采⽤飞思卡尔 16 位微控制器MC9S12DB128B作为核⼼控制单元,⾃主构思控制⽅案及系统设计,包括传感器信号采集处理、控制算法及执⾏、电机驱动、转向舵机控制等,完成智能车⼯程制作及调试,于指定⽇期与地点参加场地⽐赛。
⽐赛成绩主要由赛车在现场成功⾏驶完赛道的时间为主。
全国⼤学⽣智能汽车竞赛所使⽤的车模是⼀款带有差速器的后轮驱动模型赛车,它由⼤赛组委会统⼀提供。
参赛队伍通过设计单⽚机的⾃动控制器控制模型车在封闭的跑道上⾃主循线运⾏。
在保证模型车运⾏稳定,即不冲出跑道的前提下,跑完两圈的时间越⼩成绩越好。
设计⾃动控制器是制作智能车的核⼼环节。
⾃动控制器是以单⽚机为核⼼,配合有传感器、电机、舵机、电池、以及相应的驱动电路,它能够⾃主识别路径,控制模型车⾼速稳定运⾏在跑道上。
⽐赛跑道表⾯为⽩⾊,中⼼有连续⿊线作为引导线,⿊线宽 25cm。
⽐赛规则限定可赛道宽度和拐弯最⼩半径等参数,赛道具体形状在⽐赛当天现场公布。
控制器⾃主识别引导线并控制模型车沿着赛道运⾏。
在严格遵守规则中对于电路限制条件,保证智能车可靠运⾏前提下,电路设计尽量简洁紧凑,以减轻系统负载,提⾼智能车的灵活性,同时坚持充分发挥创新原则,以简洁但功能完美为出发点,并以稳定性为⾸要前提,实现智能车快速运⾏。
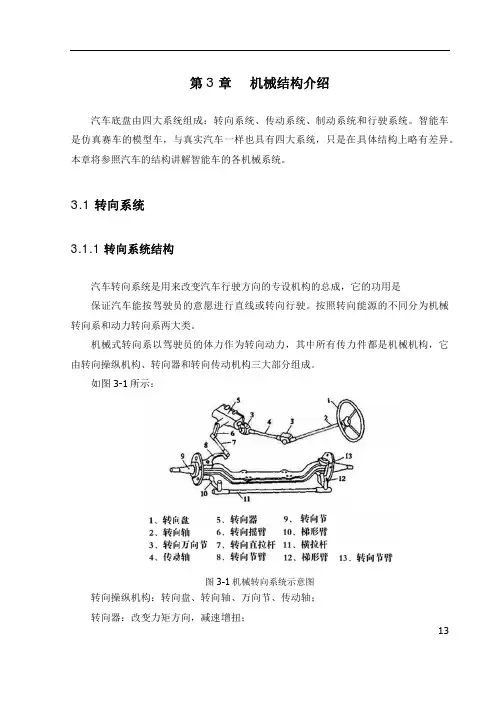
是仿本章3.13.1转向由转 汽车底盘由仿真赛车的模章将参照汽车1 转向系统.1 转向系汽车转向系保证汽车能向系和动力转机械式转向转向操纵机构如图3-1所转向操纵机转向器:改由四大系统模型车,与车的结构讲统系统结构系统是用来能按驾驶员转向系两大向系以驾驶构、转向器所示:机构:转向改变力矩方第3章统组成:转与真实汽车讲解智能车的来改变汽车行员的意愿进大类。
驶员的体力器和转向传动图3-向盘、转向轴方向,减速增机械向系统、传一样也具有的各机械系行驶方向的行直线或转作为转向动动机构三大-1机械转向轴、万向节增扭;械结构介传动系统、有四大系统系统。
的专设机构的转向行驶。
动力,其中大部分组成。
系统示意图节、传动轴;介绍制动系统和统,只是在具的总成,它按照转向能中所有传力件。
和行驶系统具体结构上它的功用是能源的不同件都是机械13统。
智能车上略有差异同分为机械械机构,它3车异。
械它—纵节。
因前转向结构向节克曼使曲向系转向传动机传力途径:纵拉杆—转向智能车转向前悬架不同分向系统是参考图3-2所构示意图,它节臂。
图3现代车辆的AC 和BD 曼几何。
当以曲柄BD 亦向同理AC 向为了避免在系统能保证在机构:转向:转动转向向节臂—左向系统为机分为非独立考汽车独立所示为汽车独它们的结构-2 独立悬挂的转向原理为两等长不以A 点为瞬向右转动β向左转角α在汽车转向在汽车转向向摇臂、转向向盘—通过左转向节绕机械转向系立式转向系立式悬架转向独立式悬架构是基本相挂转向系统示理是四杆机构不平行的曲瞬时中心时1角。
此时2时,经由图3向时产生路向时所有车向直拉杆、万向节输入主销偏转—,结构上与统和独立式向系统设计架转向系统的同的。
智能示意图 构中的双曲柄,即AB ,中心将曲,α1>β1;连杆CD 使3-4四连杆双面对汽车行轮均作纯滚转向节臂、入转向器——左梯形臂与汽车的转式转向系统计的。
的结构示意能车转向系曲柄机构,如B 和CD 两平曲柄AC 向使曲柄BD 亦双曲柄机构行驶的附加滚动。

飞思卡尔智能车控制系统硬件设计硬件部分:电机舵机传感器车模电机:主要作用是产生驱动转矩,作为小车的动力源。
舵机:能够转舵并保持舵位的装置,也就是让小车拐弯的装置。
传感器:能感受规定的被测量并按照一定的规律转换成可用输出信号的器件或装置,在智能车中,最重要的传感器就是摄像头。
车模:智能车车架,包括底板、齿轮、车轮、电池等等。
主要内容:•MCU最小系统设计•电机及舵机驱动电路设计•光电检测电路原理与设计•图像检测原理与设计1.控制系统的构成一般控制系统由传感器、控制器和执行器组成。
智能车中主要体现:光电器件或器件构成的寻线传感器。
用于操纵小车行走和转向的执行器。
根据传感器信息控制执行器动作的控制器。
三者之间的关系可用如下的关系图描述:飞思卡尔杯规定了比赛用车模、控制器所使用的MCU、执行器、传感器的数量等,比赛中硬件设计所涉及的主要工作是:•设计可靠的MCU控制电路;•执行器驱动电路;•传感器电路;(进行硬件设计的工具很多,建议使用Protel99SE,该软件易上手、效率高,可满足一般电路设计要求。
)MC9S12DG128 的封装2 .MCU最小系统设计MCU最小系统设计分为供电系统设计、复位系统设计、时钟电路设计、BDM调试接口设计、串口通讯设计。
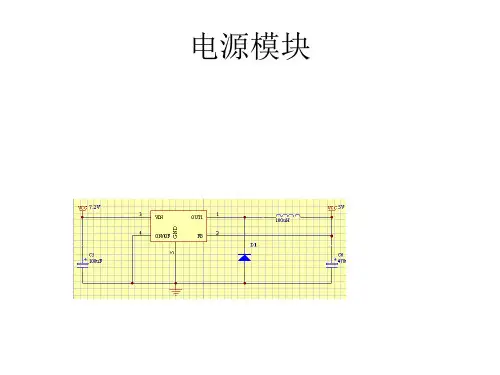
2.1 MCU供电系统设计MCU正常工作需要合理供电,为获取良好的抗干扰能力,电源设计很重要。
针对此次比赛使用的电池和MCU,在供电系统设计中要充分考虑以下因素的影响:1.系统供电电源为7.2V镍氢电池组,不能直接为MCU及其它TTL电路供电。
2.为保证较高的行驶速度,驱动电机需使用电池组直接驱动,故电源电压波动较大。
3.转向用舵机工作电压为5V,其启动电流较大,如与MCU共用5V电源,会引入较大的干扰。
4.采用三端稳压器7805存在效率低、抗干扰能力差的缺点。
采用三端稳压器的电源设计:升降压开关稳压电路•MCU供电飞思卡尔S12系列单片机采用了若干组电源,必须很好的对这些供电电源进行良好的滤波,才能设计出抗干扰能力强的控制器。
飞思卡尔智能车竞赛设计方案清晨的阳光透过窗帘,洒在书桌上那厚厚一摞方案草稿上。
我泡了杯咖啡,打开电脑,准备着手写这个“飞思卡尔智能车竞赛设计方案”。
10年的方案写作经验告诉我,这是一个充满挑战的任务,但也是展示自己才华的舞台。
一、项目背景飞思卡尔智能车竞赛是一场针对大学生的科技竞赛,旨在培养创新精神和实践能力。
参赛队伍需要设计一款智能车,通过传感器、控制器、执行器等部件,使车辆在规定的赛道上自主行驶,完成各种任务。
这场比赛既考验技术,也考验团队协作。
二、设计方案1.车辆整体设计车辆整体设计要兼顾美观、实用和稳定性。
外观上,我们采用流线型设计,减少空气阻力;内部结构紧凑,降低重心,提高稳定性。
车辆尺寸符合比赛规定,确保在赛道上行驶自如。
2.传感器配置(1)激光雷达:用于实时获取车辆周围环境信息,绘制三维地图。
(2)摄像头:用于识别赛道标志、障碍物等。
(3)超声波传感器:用于检测前方障碍物距离,避免碰撞。
(4)红外传感器:用于检测赛道边缘,防止车辆出轨。
3.控制器设计(1)路径规划:根据传感器信息,实时规划车辆行驶路径。
(2)速度控制:根据赛道状况,调整车速,确保稳定行驶。
(3)避障策略:当检测到前方有障碍物时,及时调整行驶方向。
4.执行器设计(1)电机驱动:驱动车辆前进、后退、转向。
(2)舵机:用于调整摄像头角度,获取更多赛道信息。
(3)电磁阀:用于控制车辆制动。
三、团队协作一个优秀的团队是项目成功的关键。
我们团队成员各司其职,密切配合:1.项目经理:负责整体进度把控,协调各方资源。
2.硬件工程师:负责车辆整体设计和传感器、执行器选型。
3.软件工程师:负责控制器设计和程序编写。
4.测试工程师:负责车辆调试和性能测试。
四、项目实施1.初期准备:收集比赛相关信息,了解赛道状况,确定设计方案。
2.设计阶段:根据设计方案,绘制图纸,选型采购。
3.制作阶段:组装车辆,调试传感器、控制器和执行器。
4.测试阶段:进行多次试验,优化控制策略,提高车辆性能。