fanuc伺服调试步骤
- 格式:pdf
- 大小:1.25 MB
- 文档页数:63
伺服调试步骤和注意点用途:介绍FANUC系统伺服调试的方法及步骤文件使用的限制以及注意事项等文件版本更新的纪录修订日期版本号文件名称修订内容修订人2009年11月 1.0 伺服调试步骤和注意点首次发布徐少华目录1、伺服调试概述 (2)1.1伺服优化的对象 (2)1.2伺服优化的方法 (2)2、手动一键设定one shot (3)2.1、one shot功能介绍 (3)2.2、参数设定支持画面的调用 (3)2.3手动加入滤波器的方法 (5)2.4伺服增益的自动调整 (5)2.5典型加工形状的测试 (7)3、伺服软件自动调整导航器 (8)3.1自动调整导航器介绍 (8)3.2导航器调整具体步骤: (9)4、servo guide手动调整 (14)4.1伺服三个环(电流环、速度环、位置环)调整 (14)4.1.1、电流环的调整:设定HRV控制模式 (14)4.1.2、速度环的调整:合理提高速度环增益(100%~600%) (16)4.1.3、位置环的调整:一步到位设定位置环增益为4000~8000 (27)4.2加减速时间常数的调整 (28)4.2.1加减速时间常数的分类 (28)4.2.2一般控制(不使用高速高精度功能)加减速时间常数的调整 (30)4.2.3高速高精度模式下时间常数的确认 (34)5、典型加工形状调整、检测 (38)5.1圆的调整 (38)5.1.1圆度的调整 (38)5.1.2圆大小调整 (39)5.1.3圆象限的调整 (39)5.2方的调整 (50)5.3、1/4圆弧的调整 (52)1、伺服调试概述1.1伺服优化的对象先来看一下FANUC系统的伺服控制原理框图,从上图,我们可以看出:系统从里至外分为“电流控制(电流环)”、“速度控制(速度环)”、“位置控制(位置环)”。
那么伺服调试的第一重要方面就是三个环在高响应、高刚性下的“和谐”工作,即为:合理提高伺服的增益,又必须保证伺服系统不出现振荡。


FANUC伺服系统一般调整BEIJING-FANUC FANUC伺服系统一般调整BEIJING-FANUC停止中的振动抑制BEIJING-FANUC 停止中的振动抑制BEIJING-FANUC停止中的振动抑制停止中的振动抑制停止中的振动抑制停止中的振动抑制积压进给(爬行)的抑制BEIJING-FANUC 积压进给(爬行)的抑制BEIJING-FANUCSERVO GUIDE 测量图形过冲的抑制BEIJING-FANUC 过冲的抑制BEIJING-FANUC高速高精度伺服调整BEIJING-FANUC 高速高精度伺服调整BEIJING-FANUC高速高精度调整概述BEIJING-FANUC 高速高精度调整概述BEIJING-FANUC高速高精度调整概述BEIJING-FANUC 高速高精度调整概述BEIJING-FANUCHRV控制设定BEIJING-FANUC HRV控制设定BEIJING-FANUC滤波器调整BEIJING-FANUC 滤波器调整BEIJING-FANUC速度增益调整BEIJING-FANUC 速度增益调整BEIJING-FANUC位置增益调整BEIJING-FANUC 位置增益调整BEIJING-FANUC前馈调整BEIJING-FANUC 前馈调整BEIJING-FANUC前馈0%前馈100%前馈调整BEIJING-FANUC 前馈调整BEIJING-FANUC前馈调整BEIJING-FANUC 前馈调整BEIJING-FANUCY轴需加VFFY500大了前馈调整BEIJING-FANUC 前馈调整BEIJING-FANUCY:好结果圆弧半径减速BEIJING-FANUC 圆弧半径减速BEIJING-FANUC10μm/div 拐角钳制速度F2000/R5拐角减速BEIJING-FANUC 拐角减速BEIJING-FANUCA B C速度差减速功能速度差减速功能BEIJING-FANUC速度差减速功能小结小结小结小结小结•双位置反馈功能(选择功能)•只要半闭环不出现震动,全闭环就可以消除震动。

FANUC 0I-MD系统机床调试及验收A机床调试一.主机上电初设1.伺服初始化(1)准备:a:按下急停,设PWE = 1,参数3111#0=1,在SET画面按扩展,选择语言为简体中文。
在参数8130中设置轴数。
b:按「SYSTEM」→「△」→「伺服设定」出现伺服设定屏幕。
(2)设初始化设定位为:00000000(3)电机代码:根据不同的电机型号进行设定。
电机型号:A8/3000i A12/3000i A22/3000i A30/3000i电机代码:177 193 197 203电机型号:A40/3000i AC8/2000i AC12/2000i AC22/2000i电机代码:207 176 191 196 (4)AMR:00000000(5)CMR:2(6)Feed Gear(N/M):根据机床实际情况设定。
直线轴:(不带光栅尺,丝杠和电机直连)螺距10mm 12mm 16mm 20mmN/M 1/100 3/250 2/125 1/50旋转轴:(不带光栅尺)转台齿轮比:1/60 1/90 1/180 1/120N/M 3/500 1/250 1/500 3/1000(7)Driection Set:111 或–111(根据机床实际情况设定)(8)Velocity pulse No. :8192 (不带光栅)(9)Position pulse No. :12500(10)Ref. Counter:根据不同的螺距进行设定螺距:10mm 12mm 16mm 20mm参考计数器10000 12000 16000 20000 (11)设定完毕,切断总电源。
(12)然后再通电,初始化设定位自动变成:00000010(13)旋转轴设定:1006.0=1,旋转轴设定(14)1008.0=1,旋转轴循环功能有效(15)1008.2=1,以转动一周的移动量舍入(16)1260=360000旋转轴转动一周的移动量(17)牙盘分度时8132=1使用分度转台功能5501.0=0分度转台功能有效5512=1最小分度数2.FSSB 设定(1)参数No.1902 设为00000000(2)参数No.1020:X:88Y:89Z:90B:66参数No.1022:X:1Y:2Z:3B:0参数No.1023:X:1Y:2Z:3B:4(按照实际顺序设置)(3)按功能键「SYSTEM」,按数次扩展键「△」,直至出现「FSSB」.(4)按软键「AMP」,出现放大器设定画面,给连接到放大器的轴设定一个顺序号,按照连接放大器的顺序设定号码。
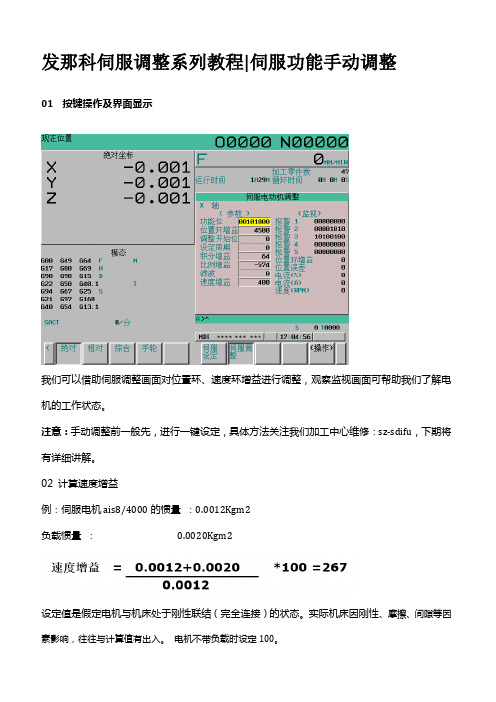
发那科伺服调整系列教程|伺服功能手动调整01按键操作及界面显示我们可以借助伺服调整画面对位置环、速度环增益进行调整,观察监视画面可帮助我们了解电机的工作状态。
注意:手动调整前一般先,进行一键设定,具体方法关注我们加工中心维修:sz-sdifu,下期将有详细讲解。
02 计算速度增益例:伺服电机ais8/4000的惯量:0.0012Kgm2负载惯量: 0.0020Kgm2设定值是假定电机与机床处于刚性联结(完全连接)的状态。
实际机床因刚性、摩擦、间隙等因素影响,往往与计算值有出入。
电机不带负载时设定100。
手动调整速度增益先设定速度增益为100(参数2021=0),每次增加100(或50),具体要根据电机大小和负载决定。
直到电机出现振动。
此时停止增大增益。
一般情况下,设定值为此时设定值的70%。
03调整位置环增益调整位置环增益以一定的速度驱动机床移动,观察伺服调整画面右侧的“位置环增益”,确认位置环增益显示数值是否正确。
确认画面显示的位置环增益,一般情况下应该和参数1825设定值一致。
进行插补的各个伺服轴位置环增益必须设定一致,只做定位控制的伺服轴位置环增益可以不同。
位置环增益手动调整对于位置环增益,直接影响工件的精度,半闭环建议设定为5000,全闭环推荐值3000。
如果机床不振动可参照次数值设定,如有振动可适当减小。
04测定电机的负载电流测定电机的负载电流伺服电机的实际电流,显示在伺服调整画面的右下方,可用来测定电机在轴移动和停止时的电流值。
●以一定速度驱动轴移动,测定实际电流。
λ●在以一定速度移动或停止时,负载电流一般不超过100%,当负载电流超过100%时,必须按照伺服电机规格说明书中规定的过载断续运行时间运行。
λ●停止时电流显示是实际电流的1~0.86倍。
λ●显示值是额定电流的百分比。
05速度环的调整快速运行,主要考虑冲击,时间常数设定的过小,则冲击太大;时间常数设定的过大,加速太慢,效率又过低。
伺服参数调整(详情参阅伺服参数手册)在系统连接并通电运行后,首先要进行伺服参数的调整,包括基本伺服参数的设定以及按机床的机械特性和加工要求进行的优化调整,如果是全闭环,要先按半闭环情况设定(参数1815#1,伺服参数画面的N/M,位置反馈脉冲数,参考计数器容量),调整正常后再设定全闭环参数,重新进行调整。
一.参数设定(FSSB)1.参数1023设定为1;2;3等。
对应光缆接口X,Y,Z等。
2.参数1902.0#,1#=0,伺服FSSB参数自动设定。
3.通过SYSTEM功能键进入FSSB画面。
4.先按【AMP】(放大器),再按【OPRT】,输入1,选择【SETTING】。
如果正常设定,会出现000报警,关机再开机。
5.按【AXIS】,再按【SETTING】,6.FSSB设定完成。
二.伺服参数初始化设定1.把3111.0(SVS)设定为1显现伺服设定和调整画面。
翻到伺服参数设定画面,设定各项(如果是全闭环,先按半闭环设定)。
注:1)第一项(初始化位)设定为0,第二项为电机代码,第三项不需要设定,第四项CMR=2,(车床的X轴为1).2)柔性齿轮比N/M按以下公式计算:电机每转动1圈所需的位置脉冲数(微米)100万三.方向:标准设111,如果需要设定相反的方向,设-111。
速度反馈脉冲数为8192,位置反馈脉冲数12500,参考计数器容量:按电机反馈回来的位置脉冲数,即参考计数器=电机每转动1圈所需的位置脉冲数或其分之一(如果设定不合适,回零将不准)。
以上参数设定完成后,关断系统电源,重新开机,则伺服初始化设定。
四.伺服调整画面:设定时,首先将功能位(2003)的位3(PI)设定1(冲床为0),回路增益(1825)设定为3000(在机床不产生振动的情况下,可以设定为5000),比例,积分增益不要改,速度增益从200增加,每增加100后,用JOG方式分别以慢速和最快速移动坐标,看是否振动。
调整原则是:尽量提高设定值,但是调整的最终结果,都要保证在手动快速,手动慢速,进给等各种情况都不能有振动。
佳泰数控(泉州)有限公司机床调试作业指导书版本号A/2生效日期2008.1.1页码2/33注意:控制单元和I/O单元的直流24V输入电源以及驱动器的三相200V输入电源。
2.10在检查完所有电源正确的情况下,系统电源才可上电,进行调试前准备工作。
3.电路原器件的介绍3.1低压断路器(QF)是具有过载.短路.欠电压等多种保护功能.3.2熔断器(FU)是一种简单而有效的保护电器,在电路中主要起到短路保护作用.3.3接触器(KM)是一种用来自动接通与断开大电流电路的电器.3.4继电器(KA)是根据某种输入信号的变化,接通或断开控制电路,实现自动控制和保护电力装置的自动电器.4.调试前准备工作4.1将机床RS232传输口与传输用计算机RS232传输口用传输电缆连接,若传输用计算机为台式计算机,则计算机外壳必须接地。
4.2目视检查机床油路连接完好。
4.3各轴支撑安装情况,是否高于导轨面4.4观察各轴伺服电机及主轴电机型号,并纪录相应的电机代码4.5打开机床电源和控制器电源,机床上电,机床显示器正常显示后,开始调试。
5.调试步骤5.1输入相应机床参数及PLC(详见机床参数表),通用CF卡传输,把标准参数和PLC备份到卡上,将20#参数设定为4,表示通过M-CARD 进行数据交换5.1.1 参数传输步骤:按下MDI 面板上[SYSTEM],依次按下软键上[PARAM],[OPRT ],[READ ] ,[EXEC]。
参数被读入内存中,输入完成后,在画面的右下脚出现“INPUT”字样会消失。
关机重新通电。
5.1.2 PLC传输步骤:按下MDI 面板上[SYSTEM],依次按下软键上[PMC],[],[I/O]。
在DEVIECE 一栏选择[M-CARD],FUNCTION 处设置为 [READ],FILE NO.为梯形图的名字,MC系统设置为[#PMC-SB.000],如果是MATE系统设置为[#PMC-RA.000] 注意: 备份梯形图后DEVICE 处设置为[ F-ROM ]把传入的梯形图编制审核批准佳泰数控(泉州)有限公司机床调试作业指导书版本号A/2生效日期2008.1.1页码6/33AI 轮廓控制(G05.1Q1 配合)1772 64 插补前铃型加减速时间常数(时间恒定)(ms)1602#6,#3 1,0 插补后加减速为直线型(使用插补前铃型加减速)1,1 插补后加减速为铃型(使用插补前直线型加减速)1603#7 1 插补前加减速为铃型(0:插补前直线型)7050#5 1 标准设定7050#6 0 标准设定7052#0 0/1 在PMC轴,Cs 轴的情况下,设定1不使用FAD功能:2007#6 FAD(精密加减速)有效2109 16 FAD 时间常数2209#2 1 FAD 直线型有效SERVO GUIDE 调试步骤1.设定打开伺服调整软件后,出现以下菜单画面:.点击上图中的“通讯设定”出现一下菜单编制审核批准。
FANUC数字伺服系统的调整通常情况下,数字伺服的调整应通过数控系统进行,数字伺服的调整可分为初始化与动态性能调整两部分。
1.FANUC数字伺服的初始化当数控系统的伺服驱动更换,或因为更换电池等原因,使伺服参数出现错误时,必须对伺服系统进行初始化处理与重新调整。
数字伺服的初始化步骤如下。
(1)初始化的准备在初始化数字伺服前,应首先确认以下基本数据,以便进行初始化工作。
1)数控系统的型号。
2)伺服电动机的型号、规格、电动机代码。
3)电动机内装的脉冲编码器的型号、规格。
4)伺服系统是否使用外部位置检测器件,如使用,需要确认其规格型号。
5)电动机每转对应的工作台移动距离。
6)机床的检测单位。
7)数控系统的指令单位。
(2)初始化的步骤数字伺服的初始化按以下步骤进行:1)使数控系统处在“紧停”状态。
2)设定系统的参数写入为“允许”状态。
3)操作系统,显示伺服参数画面。
对于不同的系统,其操作方法有所区别,具体如下:对于FANUC 0C系统,操作步骤为:①将机床参数PRM389 bit0设定为“1”,使伺服参数页面可以在CRT上显示。
②关机,使PRM389 bit0的设定生效。
③通过按系统操作面板上的“PARAM”(参数显示)键(按键可能需要数次,或直接通过系统显示的“软功能键”进行选择),直到出现图5-18所示的页面显示。
对于FANUC l5系列系统:按“SERVICE”键数次,直到出现图5-18所示的页面显示;对于FANUC l6/18/20/21系列系统,操作步骤为:①将机床参数PRM3111 bit0设定为“1”,使伺服参数页面可以在CRT上显示。
②关机,使PRM3111 bit0的设定生效。
③按“SYSTEM”键,选择“系统”显示页面。
④按次序依次操作“软功能键”〖SYSTEM〗→〖>〗→〖SV-PRM〗,使图5-18所示的页面显示。
图5-18 数字伺服初始化页面4)根据系统的要求设定伺服系统的指令单位(INITIAL SET BITS的bit0);设定初始化参数(INITIAL SET BITS的bitl)为初始化方式(见表5-17)。
SERVO GUIDE -1伺服调试的步骤伺服调试的步骤连接设定连接设定1.打开伺服调整软件后,出现以下菜单画面:图1 :主菜单2.点击图1 的“通信设定”,出现以下菜单。
连接设定连接设定图2:通讯设定连接设定连接设定NC 的IP 地址检查如下:图3:CNC的IP地址设定连接设定连接设定电脑的IP 地址检查:图4:PC 的IP 地址设定连接设定连接设定如果以上设定正确,在测试后还没有显示OK,请检查网线连接是否正确。
图5:NC-PC 正确连接连接设定连接设定注意:对于现在的新笔记本电脑,内置网卡可能自动识别网络信号,如果是这样的,则耦合器和交叉网线不需要,直接连接就可以了。
下拉参数页面下拉参数页面1,点击主菜单(图)上面的“参数”,如下:图6:参数初始画面下拉参数页面下拉参数页面点击“在线”,如果正确(NC 出于MDI 方式,POS 画面),则出现下述参数画面。
注意:CNC 型号选择,必须和你正在调试的系统一致,否则所显示的参数号可能和实际的有差别。
下拉参数页面下拉参数页面2,参数初始画面及系统设定图7:参数系统设定画面下拉参数页面下拉参数页面参数画面打开后进入“系统设定”画面,该画面的内容不能改动,可以检查该系统的高速高精度功能和加减速功能都有哪些,后面的调整可以针对这些功能修改。
频率响应测定频率响应测定通过频率响应测量各轴的共振点,并用滤波器参数来抑制共振。
在满足波形要求,保证共振点被抑制的情况下,提高速度环路增益。
图8:频率响应频率响应测定频率响应测定在图形画面,按“工具”-〉“频率响应”,然后按“测量”,选择需要测量的轴(X,Y,Z 等),然后按“开始”就可以自动侧量了。
通过观察上述图形,可以看到共振点的中心频率等,在参数画面上设定。
如下:图9:滤波器设定频率响应测定频率响应测定注意:设定参数时一定要选择相应的轴。
设定完后一定要再测一遍。
图10 加滤波器后的频率响应曲线如果有两个或以上共振点,可以使用多个滤波器来抑制(每个轴有四个滤波器)。
频率响应测定频率响应测定通过调整滤波器参数,使响应曲线变平缓,则可以继续增加速度环增益,但必须符合以下几点:曲线不能高于+10dB;共振点抑制到-10dB;1000HZ 附近的不高于-20dB.频率响应测定频率响应测定在实际调试中,为了应对相对复杂的实际情况,将标准设定得更加严格,波形如图X所示。
曲线不能高于+10dB,如图2中的红圈1部分;在200HZ~1000HZ范围内,如果有振动突起,突起部分不能高于-30dB。
频率响应测定频率响应测定图11 实际调试频率响应测定波形频率响应测定频率响应测定滤波器的使用:图12 滤波器中心频率:指得是突起部分的中心频率,如图3中为535HZ;频率响应测定频率响应测定带宽:根据实际的波形进行设定;阻尼:设置值的意思是把中心凸起部分拉低至现有高度的百分之几。
此例使用了10%,意为将凸起的中心频率从现有高度拉到现有高度的10%。
注意:系统为每个轴分别提供了4个滤波器(图5是Y轴),进行滤波时一定要选择相对应的轴。
设定滤波器后,一定要进行频率响应测试。
如果有多处共振点,可以使用多个滤波器。
如果4个滤波器全部使用上,还出现共振,那么需要进行机械的调整。
TCMD曲线测定TCMD曲线测定直线运动的测试为:分别在一般控制和AICC/AIAPC控制两种模式下,快速和切削进给直线运动。
故,有一般控制和AICC/AIAPC控制的两套参数。
选择程序画面,按下述图示步骤(1-10)完成一个程序生成并传送到NC 中。
TCMD曲线测定TCMD曲线测定图13:直线移动程序画面TCMD曲线测定TCMD曲线测定例如:选择X 轴,切削进给,高精度模式(AICC有效),使用HRV3控制,脉冲序号为1(即程序中的N1 触发采样,对应图形画面下的通道设定的触发序号)。
这些设定正确后,按适用(7),则在右边出现程序文本,通过按[输入](8),出现对话框,显示NC 中存储的程序号,输入1个里面没有出现的号码(比如111,以后每次新做成的程序都可以用这个号)。
发送该程序到NC中(9),NC把这个程序作为子程序。
由于是在MDI 方式下调试,所以主程序只是MDI 方式下调用一个子程序,程序运行一遍后就没有了,所以每次执行程序时,都需要重新发送一遍主程序。
只要不修改程序,子程序都不需要重新发送。
TCMD曲线测定TCMD曲线测定图14 :直线移动图形设定画面TCMD曲线测定TCMD曲线测定对于测定数据点,主要是看采集的点是否足够,但太多会影响采集时间,采样周期为1ms,触发顺序号为1(与程序画面N1 对应,图20 的步骤6),通道1,2 的数据类型按照上图(图21)设定,注意换算系数和换算基准不要修改。
设定完成后,开始采样。
如下所示:TCMD曲线测定TCMD曲线测定图15:直线移动数据测定先按“”再按“”开始采样,如果主程序没有发送,这时候再到图形画面按主程序发送按钮“”。
发送完毕。
TCMD曲线测定TCMD曲线测定直接按面板上的“循环起动”按钮,当NC程序运行到N1 时自动采样数据(TCMD,SPEED)。
数据采集后自动显示出所采样的波形,如果波形显示异常,可通过按“A”或图形中的“”将图形显示出来,再按“”来调整波形大小,用来直观的检查加减速或增益(速度,位置)设定是否合适。
如果加减速时间常数太小或者增益设定太高,则会在上图中出现波形变化(变陡或者变粗),好的波形为:在加减速的地方电流波形平滑过渡,而在直线部分从头到尾幅度应该相同,如果逐渐变粗,表示增益太高。
TCMD曲线测定TCMD曲线测定图16:直线移动波形显示TCMD曲线测定TCMD曲线测定相对应的调整参数:有一般控制,AI先行控制,和AI轮廓控制下的加减速;不同控制时参数不一样。
图17 SERVO GUIDE画面下拉加速度TCMD曲线测定TCMD曲线测定一般控制图18 一般控制下的加速度TCMD曲线测定TCMD曲线测定注意:切削进给的时间常数保证每个轴都一致。
AI先行控制/AI轮廓控制:TCMD曲线测定TCMD曲线测定图19 AI轮廓控制下的加速度TCMD曲线测定TCMD曲线测定注意:①AICC和AIAPC在加速度方面主要区别:AIAPC没有钟型加减速,而AICC有。
②“插补前加/减速的每个轴的允许最大加速度”保证每个轴都一致。
③快速度移动部分的参数跟一般控制时一样。
圆弧曲线调整圆弧曲线调整如果对于直线移动调整的比较好,则圆弧的调整相对来说就简单多了,程序生成如下所示:图20圆弧程序的生成圆弧曲线调整圆弧曲线调整操作步骤和上述直线移动差不多,注意横轴和纵轴的选择。
假如横轴X,纵轴Y,则X 轴中心为-10。
图21:圆弧程序通道设定圆弧曲线调整圆弧曲线调整对于通道的设定,注意换算系数为0.001,基准为1,不能错,否则圆弧不能正常显示。
另外,对于中心点的设定,由于程序横轴中心点在-10 处,所以应该设定如下:图22:圆弧程序通道的图形中心设定圆弧曲线调整圆弧曲线调整其他操作方法和直线移动一样。
图形显示如下(圆弧方式):图23:圆弧测试程序结果显示圆弧曲线调整圆弧曲线调整如果圆弧显示变形,可能是由于背隙补偿造成,可在测试前将参数1851 改为1。
如果象限有凸起或者过切,通过调整速度增益和背隙加速等参数来调整,注意对于静态摩擦较大的机床,不要仅仅通过SERVO GUIDE 的图形来判断象限凸起的程度,而应该和DDB (球感仪)同时考虑。
圆弧曲线调整圆弧曲线调整相对应的参数调整图24 背隙加速画面圆弧曲线调整圆弧曲线调整走方调整走方调整主要检查拐角误差,对于那些对拐角要求较高的用户,可以通过该程序来检查参数是否合适。
图25:走方程序的程序生成走方调整走方调整将需要观看的拐角放到图形的中心,然后连续按“u”,则显示如下:图26:走方程序的图形显示走方调整走方调整注意:对于对拐角要求不太高的加工,没有必要追求拐角误差精度,因为片面的追求减小拐角误差,会影响加工速度。
通道的设定与走圆相同。
走方调整走方调整对应的参数调整:图27 拐角速度差画面走方调整走方调整走方带四分之一圆弧走方带四分之一圆弧方带1/4圆弧主要用于检测直线和圆弧过渡情况。
过渡越平顺越好。
图28:方带1/4 圆弧程序的程序生成走方带四分之一圆弧走方带四分之一圆弧通道设定与圆相同,图形显示方式为CONTOUR(轮廓)方式。
波形显示如下图:图29 :方带1/4 圆弧程序的图形显示走方带四分之一圆弧走方带四分之一圆弧注意:右边的“参考”设定为有效(显示编程轨迹),通过按“u”或“d”来改变显示刻度(放大或缩小)。
速度和位置增益,插补后时间常数,圆弧半径减速等参数都会影响这个轮廓误差。
走方带四分之一圆弧走方带四分之一圆弧相对应的参数调整:图30 圆弧加速度设定画面走方带四分之一圆弧走方带四分之一圆弧刚性攻丝的调整刚性攻丝的调整用于调整刚性攻丝的同步误差图31:刚性攻丝程序生成。