哈工大《现代控制理论基础》第十一章 最优控制
- 格式:ppt
- 大小:1.07 MB
- 文档页数:44

现代控制理论知到章节测试答案智慧树2023年最新哈尔滨工程大学绪论单元测试1.经典控制理论以单变量线性定常系统作为主要的研究对象,以时域法作为研究控制系统动态特性的主要方法。
参考答案:错2.1892年俄国数学家李亚普诺夫发表了论文《运动稳定性的一般问题》,用严格的数学分析方法全面地论述了稳定性问题。
参考答案:对3.现代控制理论以多变量线性系统和非线性系统作为研究对象,以时域法,特别是状态空间方法作为主要的研究方法。
参考答案:对4.研究系统控制的一个首要前提是建立系统的数学模型,线性系统的数学模型主要有两种形式,即时间域模型和频率域模型。
参考答案:对5.下述描述中哪些作为现代控制理论形成的标志()。
参考答案:最优控制中的Pontriagin极大值原理和Bellman动态规划;用于系统的整个描述、分析和设计过程的状态空间方法;随机系统理论中的Kalman滤波技术第一章测试1.输入输出描述是描述系统输入变量和输出变量关系的模型。
参考答案:对2.状态空间描述能完全表征系统的一切动力学特征。
参考答案:对3.系统的状态是指能够完全表征系统时间域行为的一个最小内部变量组。
参考答案:对4.系统的状态空间描述是唯一的。
参考答案:错5.坐标变换是指将系统在状态空间的一个基底上的表征,化为另一个基底上的表征。
参考答案:对6.当状态空间描述中的A矩阵有相同的特征值时,一定不能将其化成对角规范形。
参考答案:错7.并联组合系统的传递函数矩阵为各并联子系统的传递函数矩阵之和。
参考答案:对8.若两个子系统输出向量的维数相同,则可实现反馈连接。
参考答案:错9.线性定常系统线性非奇异变换后()。
参考答案:系统的特征值不变10.考虑如图所示的串联组合系统,下列论述正确的是()。
参考答案:串联组合后系统的状态方程为第二章测试1.一般线性系统状态方程的解由两部分组成,第一部分反映系统初态的影响,第二部分反映系统输入对状态的影响。
参考答案:对2.零初态响应指系统初始状态为零时,由系统输入单独作用所引起的运动。

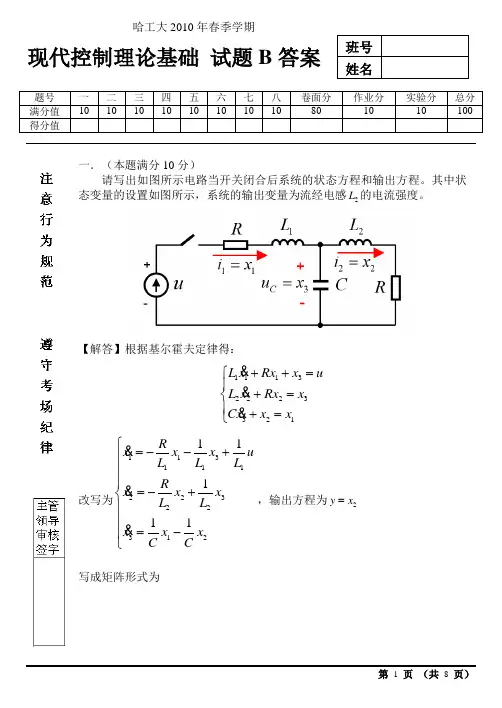
哈工大2010年春季学期现代控制理论基础 试题B 答案一.(本题满分10分)请写出如图所示电路当开关闭合后系统的状态方程和输出方程。
其中状态变量的设置如图所示,系统的输出变量为流经电感2L 的电流强度。
【解答】根据基尔霍夫定律得:11132223321L x Rx x u L x Rx x Cxx x ++=⎧⎪+=⎨⎪+=⎩ 改写为1131112232231211111R x x x uL L L R x x x L L x x x C C ⎧=--+⎪⎪⎪=-+⎨⎪⎪=-⎪⎩,输出方程为2y x =写成矩阵形式为[]111112222331231011000110010RLL x x L R x x u L L x x C C x y x x ⎧⎡⎤--⎡⎤⎪⎢⎥⎢⎥⎪⎢⎥⎡⎤⎡⎤⎢⎥⎪⎢⎥⎢⎥⎢⎥=-+⎢⎥⎪⎢⎥⎢⎥⎢⎥⎢⎥⎪⎢⎥⎢⎥⎢⎥⎪⎣⎦⎣⎦⎢⎥⎢⎥⎨⎢⎥-⎣⎦⎢⎥⎪⎣⎦⎪⎡⎤⎪⎢⎥⎪=⎢⎥⎪⎢⎥⎪⎣⎦⎩二.(本题满分10分)单输入单输出离散时间系统的差分方程为(2)5(1)3()(1)2()y k y k y k r k r k ++++=++回答下列问题:(1)求系统的脉冲传递函数; (2)分析系统的稳定性;(3)取状态变量为1()()x k y k =,21()(1)()x k x k r k =+-,求系统的状态空间表达式; (4)分析系统的状态能观性。
【解答】(1)在零初始条件下进行z 变换有:()()253()2()z z Y z z R z ++=+系统的脉冲传递函数:2()2()53Y z z R z z z +=++ (2)系统的特征方程为2()530D z z z =++=特征根为1 4.3z =-,20.7z =-,11z >,所以离散系统不稳定。
(3)由1()()x k y k =,21()(1)()x k x k r k =+-,可以得到21(1)(2)(1)(2)(1)x k x k r k y k r k +=+-+=+-+由已知得(2)(1)2()5(1)3()y k r k r k y k y k +-+=-+-112()5(1)3()r k x k x k =-+-[]212()5()()3()r k x k r k x k =-+-123()5()3()x k x k r k =--- 于是有:212(1)3()5()3()x k x k x k r k +=--- 又因为12(1)()()x k x k r k +=+所以状态空间表达式为[]112212(1)()011()(1)35()3()()10()x k x k r k x k x k x k y k x k ⎧+⎡⎤⎡⎤⎡⎤⎡⎤=+⎪⎢⎥⎢⎥⎢⎥⎢⎥+---⎣⎦⎣⎦⎪⎣⎦⎣⎦⎨⎡⎤⎪=⎢⎥⎪⎣⎦⎩(4)系统矩阵为0135⎡⎤=⎢⎥--⎣⎦G ,输出矩阵为[]10=c ,[][]01100135⎡⎤==⎢⎥--⎣⎦cG 能观性矩阵为o 1001⎡⎤⎡⎤==⎢⎥⎢⎥⎣⎦⎣⎦c Q cG ,o rank 2=Q ,系统完全能观。
自适应控制和最优控制的基本原理和应用在现代控制理论中,自适应控制和最优控制是两个重要的概念。
自适应控制是指根据被控对象的运动情况及其参数变化,调整控制器的参数,使得被控对象满足预先设定的控制性能要求。
最优控制是指在满足控制性能的基础上,使控制器的能耗最小,系统响应最快。
自适应控制和最优控制的基本原理是以被控对象的数学模型为基础。
对于自适应控制,需要对被控对象进行建模,以确定控制器参数的调整方向。
对于最优控制,需要对被控对象的数学模型进行优化,以找到最优的控制方案。
在自适应控制中,最常用的方法是模型参考自适应控制。
这种方法通过建立一个参考模型,将被控对象的运动与参考模型的运动进行比较,然后根据比较结果调整控制器的参数。
这种方法的优点是简单易懂,容易实现。
不过,这种方法要求被控对象的数学模型必须非常精确,否则会导致控制器参数调整不准确。
另一种常用的自适应控制方法是基于模糊逻辑的自适应控制。
该方法通过将控制器的参数用模糊集合形式表示,以适应被控对象模型的不确定性。
这种方法虽然参数调整方向不如模型参考自适应控制精确,但是可以适应更广泛的控制情况。
最优控制中,最常用的方法是线性二次型控制(LQR)。
这种方法通过对被控对象的数学模型进行优化,确定最优的控制器参数,以使系统的能耗最小。
该方法的优点是在满足控制性能的前提下,能够有效降低系统的能耗,提高系统的效率。
最优控制还可以用于求解动态优化问题。
在这种情况下,被控对象的状态会随时间变化,需要在每个时刻对控制器参数进行优化,以获得最优的控制方案。
这种方法可以应用于许多领域,包括经济系统、交通运输、动力系统等。
自适应控制和最优控制都有广泛的应用。
例如,在机械加工、机器人控制、电力系统等领域中,自适应控制可以有效提高系统的稳定性和控制性能。
而在航空航天、汽车控制、自动驾驶等领域中,最优控制可以降低系统的能耗,提高系统的效率。
总的来说,自适应控制和最优控制是现代控制理论中非常重要的概念,它们的应用范围广泛,可以有效地提高系统的效率和控制性能。
《现代控制理论基础》教学大纲课程编码:T1040031课程名称:现代控制理论基础课程英文名称:Modern Control Theory总学时:44 讲课学时: 36 习题课学时:0 实验学时:8 上机学时:12 开课单位:航天学院控制科学与工程系控制理论及应用教研室开课对象:控制类专业本科生预修课程:电路原理、电子技术和电机方面的有关课程;复变函数和线性代数教材:《自动控制原理》李友善主编,国防工业出版社,2005年国防科工委“十五”规划教材《自动控制原理》(下册)裴润、宋申民、王彤编哈尔滨工业大学出版2006年参考书:《现代控制理论》(第2版)刘豹主编机械出版社2000年《现代控制工程》(第三版)Ogata著电子出版社2000年《自动控制原理》(第四版)胡寿松主编,科学出版社,2001年《Linear Control System Analysis and Design》(第四版)清华大学出版社,2000年一、本课程的教学目的和要求及其在教学中的地位:通过本课程的学习使学生了解现代控制理论的基本内容、自动控制系统的状态空间分析方法,掌握综合线性系统的原理和方法以及最优控制的基本理论,对现代控制理论有全面的掌握,对系统辩识、最优控制、计算机控制的理论有深入了解。
掌握非线性系统的稳定性及其理论,掌握线性和非线性系统稳定性的基本分析方法。
二、本课程的主要教学内容、各章节内容及其学时安排本课程是《自动控制原理I》课程的继续,前8章在《自动控制原理I》课中讲。
第九章线性系统状态空间分析法(12学时)1.状态空间的基本概念2.控制系统状态空间表达式3.线性定常系统的分析4.线性时变系统的分析5.线性离散系统的分析6. 线性状态方程的离散化第十章李雅普诺夫稳定性分析(8学时)1. 李雅普诺夫意义下的稳定性2. 判别系统稳定性的李雅普诺夫方法3. 应用李雅普诺夫方法分析线性系统稳定性4. 应用李雅普诺夫方法分析非线性系统稳定性第十一章线性系统的状态空间综合法(10学时)1. 线性系统的能控性和能观性2. 线性系统的结构分析3. 线性系统的状态反馈和输出反馈4. 线性系统的状态观测器5. 线性系统的解耦6. 线性系统的实现第十二章最优控制(6学时)1. 最优控制的一般提法2. 应用变分法求解无约束问题的最优控制3. 极小值原理4. 线性二次型最优控制问题5. 动态规划三、其他教学环节安排:1、实验内容(8学时)(1) 数字控制系统实验(4学时)a. 数字控制系统的基本组成b. 数字控制系统的设计(2) 现代控制理论实验(4学时)a. 控制系统状态空间分析法计算机辅助设计b. 二阶倒立摆实验2、上机:课外学时:20四、考试权重:平时成绩20%;期末成绩80%。
现代控制理论_哈尔滨工程大学中国大学mooc课后章节答案期末考试题库2023年1.已知线性定常系统如下所示,下面说法错误的是()【图片】参考答案:引入状态反馈后,不改变系统的能观测性。
2.串联组合系统的传递函数矩阵为各串联子系统的传递函数矩阵之和。
参考答案:错误3.在最优控制问题中,如果系统的性能指标是状态变量和控制变量的二次型函数,则称为线性二次型最优控制问题,简称LQ(Linear Quadratic)问题。
参考答案:错误4.用不大的控制能量,使系统输出尽可能保持在零值附近,这类问题称为输出调节器问题。
参考答案:正确5.研究系统控制的一个首要前提是建立系统的数学模型,线性系统的数学模型主要有两种形式,即时间域模型和频率域模型。
参考答案:正确6.现代控制理论以多变量线性系统和非线性系统作为研究对象,以时域法,特别是状态空间方法作为主要的研究方法。
参考答案:正确7.1892年俄国数学家李亚普诺夫发表了论文《运动稳定性的一般问题》,用严格的数学分析方法全面地论述了稳定性问题。
参考答案:正确8.经典控制理论以单变量线性定常系统作为主要的研究对象,以时域法作为研究控制系统动态特性的主要方法。
参考答案:错误9.下述描述中哪些作为现代控制理论形成的标志()参考答案:用于系统的整个描述、分析和设计过程的状态空间方法._最优控制中的Pontriagin极大值原理和Bellman动态规划。
_随机系统理论中的Kalman 滤波技术。
10.内部稳定性表现为系统的零初态响应,即在初始状态恒为零时,系统的状态演变的趋势。
参考答案:错误11.系统矩阵A所有特征值均具有负实部是线性时不变系统渐近稳定的充要条件。
参考答案:正确12.从物理直观性看,能观测性研究系统内部状态“是否可由输入影响的问题”。
参考答案:错误13.由系统结构的规范分解所揭示,传递函数矩阵一般而言只是对系统结构的不完全描述,只能反映系统中的能控能观测部分.参考答案:正确14.下面论述正确的是()参考答案:李亚普诺夫意义下渐近稳定等同于工程意义下稳定。
《现代控制理论》教案大纲第一章:绪论1.1 课程背景与意义1.2 控制系统的基本概念1.3 控制理论的发展历程1.4 控制理论的应用领域第二章:控制系统数学模型2.1 连续控制系统数学模型2.2 离散控制系统数学模型2.3 状态空间描述2.4 系统矩阵的性质与运算第三章:线性系统的时域分析3.1 系统的稳定性3.2 系统的瞬时性3.3 系统的稳态性能3.4 系统的动态性能第四章:线性系统的频域分析4.1 频率响应的概念4.2 频率响应的性质4.3 系统频率响应的求取方法4.4 系统频域性能指标第五章:线性系统的校正与设计5.1 系统校正的基本概念5.2 常用校正器及其特性5.3 系统校正的方法5.4 系统校正实例分析第六章:非线性控制系统分析6.1 非线性系统的基本概念6.2 非线性系统的数学模型6.3 非线性系统的稳定性分析6.4 非线性系统的控制策略第七章:状态反馈与观测器设计7.1 状态反馈控制的基本原理7.2 状态反馈控制器的设计方法7.3 观测器的设计与分析7.4 状态反馈控制系统应用实例第八章:先进控制策略8.1 鲁棒控制8.2 自适应控制8.3 最优控制8.4 智能控制第九章:最优控制理论9.1 最优控制的基本概念9.2 线性二次调节器(LQR)9.3 离散时间最优控制9.4 最优控制的应用第十章:现代控制理论在工程应用10.1 现代控制理论在自动化领域的应用10.2 现代控制理论在控制中的应用10.3 现代控制理论在航空航天领域的应用10.4 现代控制理论在其他领域的应用第十一章:鲁棒控制理论11.1 鲁棒控制的基本概念11.2 鲁棒控制的设计方法11.3 鲁棒控制的应用实例11.4 鲁棒控制在实际系统中的性能评估第十二章:自适应控制理论12.1 自适应控制的基本概念12.2 自适应控制的设计方法12.3 自适应控制的应用实例12.4 自适应控制在复杂系统中的应用与挑战第十三章:数字控制系统设计13.1 数字控制系统的概述13.2 数字控制器的设计方法13.3 数字控制系统的仿真与实验13.4 数字控制系统在实际应用中的案例分析第十四章:控制系统中的计算机辅助设计14.1 计算机辅助设计的基本概念14.2 控制系统CAD工具与方法14.3 基于软件的控制系统设计与仿真14.4 控制系统CAD在现代工程中的应用案例第十五章:现代控制理论的前沿与发展15.1 现代控制理论的最新研究动态15.2 控制理论与其他领域的交叉融合15.3 未来控制理论的发展趋势15.4 控制理论在解决现实世界问题中的潜力与挑战重点和难点解析本《现代控制理论》教案大纲涵盖了现代控制理论的基本概念、方法与应用,分为十五个章节。
《现代控制理论》课程教案第一章:绪论1.1 课程简介介绍《现代控制理论》的课程背景、意义和目的。
解释控制理论在工程、科学和工业领域中的应用。
1.2 控制系统的基本概念定义控制系统的基本术语,如系统、输入、输出、反馈等。
解释开环系统和闭环系统的区别。
1.3 控制理论的发展历程概述控制理论的发展历程,包括经典控制理论和现代控制理论。
介绍一些重要的控制理论家和他们的贡献。
第二章:数学基础2.1 线性代数基础复习向量、矩阵和行列式的基本运算。
介绍矩阵的特殊类型,如单位矩阵、对角矩阵和反对称矩阵。
2.2 微积分基础复习微积分的基本概念,如极限、导数和积分。
介绍微分方程和微分方程的解法。
2.3 复数基础介绍复数的基本概念,如复数代数表示、几何表示和复数运算。
解释复数的极坐标表示和欧拉公式。
第三章:控制系统的基本性质3.1 系统的稳定性定义系统的稳定性,并介绍判断稳定性的方法。
解释李雅普诺夫理论在判断系统稳定性中的应用。
3.2 系统的可控性定义系统的可控性,并介绍判断可控性的方法。
解释可达集和可观集的概念。
3.3 系统的可观性定义系统的可观性,并介绍判断可观性的方法。
解释观测器和状态估计的概念。
第四章:线性系统的控制设计4.1 状态反馈控制介绍状态反馈控制的基本概念和设计方法。
解释状态观测器和状态估计在控制中的应用。
4.2 输出反馈控制介绍输出反馈控制的基本概念和设计方法。
解释输出反馈控制对系统稳定性和性能的影响。
4.3 比例积分微分控制介绍比例积分微分控制的基本概念和设计方法。
解释PID控制在工业控制系统中的应用。
第五章:非线性控制理论简介5.1 非线性系统的特点解释非线性系统的定义和特点。
介绍非线性系统的常见类型和特点。
5.2 非线性控制理论的方法介绍非线性控制理论的基本方法,如反馈线性化和滑模控制。
解释非线性控制理论在实际应用中的挑战和限制。
5.3 案例研究:倒立摆控制介绍倒立摆控制系统的特点和挑战。
解释如何应用非线性控制理论设计倒立摆控制策略。