MPU6050加速度计使用说明书V4
- 格式:pdf
- 大小:1.21 MB
- 文档页数:12

《自己整理的MPU6050中文资料》一、MPU6050简介MPU6050是一款集成了加速度计和陀螺仪的六轴运动处理传感器。
它采用小巧的封装,具有高精度、低功耗的特点,广泛应用于无人机、智能穿戴设备、智能手机等领域。
通过测量物体在三维空间中的加速度和角速度,MPU6050可以帮助我们实现对运动状态的实时监测和分析。
二、MPU6050核心特点1. 六轴运动处理:MPU6050将加速度计和陀螺仪集成在一个芯片上,实现六轴运动处理。
2. 数字输出:采用数字输出接口,方便与微控制器(如Arduino、STM32等)进行通信。
3. 高精度:加速度计精度为±16g,陀螺仪精度为±2000°/s,满足大多数应用场景的需求。
4. 低功耗:在低功耗模式下,功耗仅为5μA,适用于长时间运行的设备。
5. 小巧封装:采用QFN封装,尺寸仅为4mm×4mm×0.9mm,便于集成到各种产品中。
6. 宽工作电压范围:2.5V至3.5V,适应不同电压需求的场景。
三、MPU6050应用场景1. 无人机:通过MPU6050实时监测飞行器的姿态,实现自主悬停、定高、平稳飞行等功能。
2. 智能穿戴设备:监测用户运动状态,如步数、步频、跌倒检测等,为健康管理提供数据支持。
3. 智能手机:辅机实现重力感应、游戏控制等功能。
4. VR/AR设备:实时监测头部姿态,为虚拟现实体验提供精准的交互。
5. 车载导航:辅助车辆进行姿态检测,提高导航精度。
6. 工业自动化:用于监测设备运行状态,实现故障预警和自动调节。
四、MPU6050接口说明1. SDA:I2C数据线,用于与微控制器通信。
2. SCL:I2C时钟线,与SDA配合实现数据传输。
3. AD0:I2C地址选择线,通过改变AD0的电平,可以设置MPU6050的I2C地址。
4. INT:中断输出,当MPU6050检测到特定事件时,通过INT脚输出中断信号。

MPU6050寄存器操作MPU6050的寄存器地址由一个7位的二进制数字表示,最高位为0表示读操作,为1表示写操作。
在进行寄存器操作之前,需要先向MPU6050的I2C地址发送START信号,然后发送要读写的寄存器地址,再发送ACK信号。
下面是一些常用的MPU6050寄存器及其功能说明:1.SMPLRT_DIV寄存器(采样频率分频器):用于配置采样频率,通过设置寄存器的值,可以调整采样频率的分频比。
2. Gyro Config寄存器(陀螺仪配置):用于配置陀螺仪的量程和滤波器。
通过设置寄存器的值,可以选择陀螺仪的量程范围和滤波器带宽。
3. Accelerometer Config寄存器(加速度计配置):用于配置加速度计的量程和滤波器。
通过设置寄存器的值,可以选择加速度计的量程范围和滤波器带宽。
4.PWR_MGMT_1寄存器(电源管理):用于控制MPU6050的电源管理,包括选择时钟源、休眠模式等。
通过设置寄存器的值,可以控制MPU6050的电源状态。
5.FIFO寄存器(数据缓冲区):MPU6050内部有一个FIFO缓冲区,用于存储传感器的原始数据。
通过读写FIFO寄存器,可以实现对传感器数据的存取。
在进行MPU6050寄存器操作时1.寄存器操作需要使用I2C总线进行通信,需要先初始化I2C接口,并设置MPU6050的I2C地址。
2.在进行寄存器写操作时,需要先向MPU6050发送START信号,然后发送写操作的寄存器地址及要写入的数据,最后发送STOP信号。
3.在进行寄存器读操作时,需要先向MPU6050发送START信号,然后发送读操作的寄存器地址和MPU6050的I2C地址,再发送ACK信号。
接着读取MPU6050返回的数据,最后发送STOP信号。
4.在进行寄存器操作时,需要根据MPU6050的数据手册来确定寄存器地址和相关配置值的含义和取值范围。
使用MPU6050时,可以通过对寄存器的配置来满足不同的应用需求。
合嵌盘古陀螺仪模块规格书合嵌盘古Gyroscope-601陀螺仪模块,测量运动或震动的三轴全方向的角速度值和加速度值,角速度最大测量范围±2000°/sec,加速度最大测量范围达到±16g。
合嵌盘古陀螺仪模块采集到的物体运动的实际角速度值和加速度值,直接从串口输出。
输出的数据格式有两种形式,分别为16进制数据和根据传感器芯片手册中的数据转换规则转换得到的实际角速度值和加速度值。
另外,本陀螺仪模块可以通过串口设置加速度阀值。
当加速度模块测量到物体运动的加速度达到此阀值时,将通过IO口输出一个高电平或低电平的跳变信号,作为中断信号使用。
合嵌盘古Gyroscope-601陀螺仪模块通过串口输出的加速度值数据如下所示:aX=0X66 +0.0gaY=0Xfff3 -0.0gaZ= 0Xe8b +0.9ggX=0Xffc6 -0.43dpsgY=0X2d +0.34dpsgZ= 0Xff7b -1.01dps其中:aX、aY、aZ分别表示三轴加速度值,gX、gY、gZ分别表示三轴角速度值。
其中 aX=0X66 +0.0g 中的0X66表示传感器测量到的16进制加速度值, +0.0g表示根据加速度传感器芯片的数据转换规则转换成的物体运动的加速度值。
其中 gX=0Xffc6 -0.43dps 中的0X ffc6表示传感器测量到的16进制角速度值,-0.43dps表示根据加速度传感器芯片的数据转换规则转换成的物体运动的角速度值。
陀螺仪模块的电气参数:工作电压: +5V工作电流: ≤50mA陀螺仪模块的技术参数:测量方向:三轴全方向自检测: 支持传感器模块的自检测加速度值测量范围: ≤±16g角速度最大测量范围: ≤±2000°/sec最高灵敏度:≤131 LSB/(º/s)数据输出率:最大8KHz抗震动的最大忍受度:≤1000g联系Q Q: 1094606988加速度模块研发生产商:安徽合嵌电子科技有限公司地址:滁州市花园西路82号1栋302#网址:应用汽车运动及汽车转弯碰撞检测、轮船运动及转弯碰撞检测、运动物体检测、电子稳像、光学稳像、 行人导航器、 “零触控”手势用户接口、 姿势快捷方式 、认证市场智能型手机 平板装置设备 手持型游戏产品 游戏机 3D遥控器 可携式导航设备。

MPU6050教程MPU6050是一款常用的惯性测量单元(IMU)模块,内集成3轴加速度计和3轴陀螺仪。
它能够测量物体在三个维度上的加速度和角速度,被广泛应用于无人机、机器人和虚拟现实等领域。
在本篇教程中,我们将介绍如何使用MPU6050模块进行数据采集和传输。
一、MPU6050模块的硬件连接要使用MPU6050模块,首先需要将其与其他硬件设备连接起来。
MPU6050通过I2C总线与单片机或其他主控设备通信。
连接时,将MPU6050的SDA引脚连接到单片机的SDA引脚,以及将MPU6050的SCL引脚连接到单片机的SCL引脚。
同时,还需要为MPU6050提供电源,将模块的VCC引脚连接到3.3V电源,将GND引脚连接到地。
二、MPU6050模块的软件配置```#include <Wire.h>#include <MPU6050.h>void setuWire.begin(;mpu.initialize(;```三、读取MPU6050的数据一旦完成了初始化,就可以读取MPU6050的数据了。
MPU6050中包含6个16位的寄存器,分别存储3轴加速度和3轴角速度的原始数据。
可以通过以下代码读取这些数据:```int16_t ax, ay, az; //加速度原始数据int16_t gx, gy, gz; //角速度原始数据void loompu.getAcceleration(&ax, &ay, &az);mpu.getRotation(&gx, &gy, &gz);```四、处理MPU6050的数据在读取了MPU6050的原始数据后,可以根据需要进行进一步处理。
比如,可以将原始数据转换为物体在各个维度上的实际加速度和角速度。
具体的转换方法可以参考MPU6050的数据手册或相关资料。
五、MPU6050数据的传输一旦完成了数据的处理,就可以将其传输给其他设备或进行存储了。
第错误!未定义书签。
页共10页MPU6050教程1.1MPU6050简介如果你想玩四轴,想搞什么空中鼠标,平衡车等待,那么MPU6050真的是太强大了,能做很多东西。
玩MPU6050的步骤:1.学习I2C ,I2C 就是MPU6050传送数据到单片机的一种协议,类似于USB ,当然USB 还是比较有难度的。
2.了解MPU6050相关寄存器,有中文版本的,一边学一边看例程就可以获取数据了。
3.把获取的数据进行各种处理。
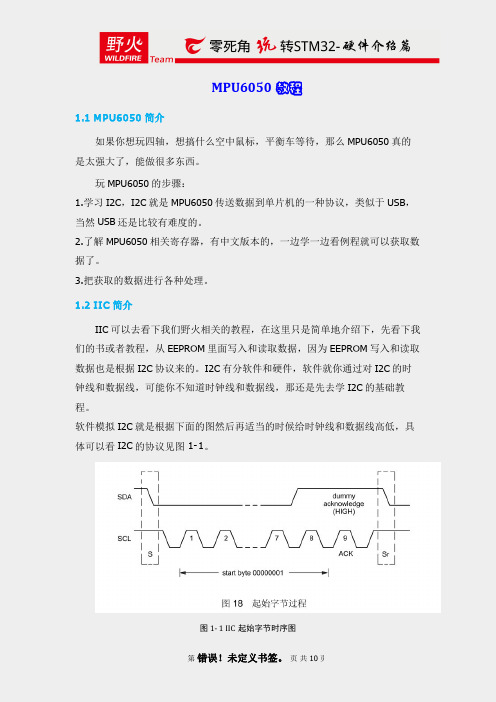
1.2IIC 简介IIC 可以去看下我们野火相关的教程,在这里只是简单地介绍下,先看下我们的书或者教程,从EEPROM 里面写入和读取数据,因为EEPROM 写入和读取数据也是根据I2C 协议来的。
I2C 有分软件和硬件,软件就你通过对I2C 的时钟线和数据线,可能你不知道时钟线和数据线,那还是先去学I2C 的基础教程。
软件模拟I2C 就是根据下面的图然后再适当的时候给时钟线和数据线高低,具体可以看I2C 的协议见图1-1。
图1-1IIC 起始字节时序图这部分学习的诀窍就是:先写下I2C通讯的一个环节就好了,比如起始字节,其他的也是大同小异,直接上网找例程就好了,想要用软件模拟出全部的时序当然也可以。
还有一个方式可以用I2C读写数据,就是硬件I2C,硬件I2C就是单片机内部的电路,可以将I2C的时序用硬件电路搞出来,这样子你读写数据就方便很多了。
STM32硬件I2C可以去看我们野火的教程。
1.3读取MPU6050原始数据我们先来认识下MPU6050的硬件,这是MPU6050模块的图片,注意是模块,中间那个才是MPU6050,只有MPU6050是不够的,还要有一些外围电路才行,这就跟51芯片跟最小系统的区别一样。
图1-2MPU6050模块正面图1-3MPU6050模块背面管脚名称说明VCC 3.3-5V(内部有稳压芯片)GND地线SCL MPU6050作为从机时IIC时钟线SDA MPU6050作为从机时IIC数据线XCL MPU6050作为主机时IIC时钟线XDA MPU6050作为主机时IIC数据线AD0地址管脚,该管脚决定了IIC地址的最低一位INT中断引脚这里重点讲解AD0的作用,I2C通讯中从机是要有地址的,以区别多个从机。
MPU6050教程MPU6050是一款六轴传感器,可测量加速度和角速度。
它集成了三轴加速度计和三轴陀螺仪,同时还具备温度传感器。
这使得MPU6050非常适合于飞行器、机器人和游戏控制器等项目。
在本教程中,我们将介绍如何使用MPU6050传感器,并使用Arduino进行数据读取和处理。
1.硬件准备:-MPU6050模块- Arduino主控板-杜邦线-电阻(10kΩ)先将杜邦线连接到MPU6050模块上。
将VCC接到Arduino的5V引脚,将GND接到地线引脚,将SCL接到Arduino的A5引脚(或者SCL引脚),将SDA接到Arduino的A4引脚(或者SDA引脚)。
注意:MPU6050是通过I2C协议与Arduino通信的,因此您需要确认Arduino上的I2C引脚与连接的引脚匹配。
2.软件准备:- MPU6050库(可在Arduino库管理器中)打开Arduino IDE并创建一个新的项目。
在库管理器中“MPU6050”,并安装最新版本的库。
然后在工具菜单中选择适当的Arduino板和端口。
3.代码编写:在新建的Arduino项目中,首先包含MPU6050库,然后声明四个变量,分别用于存储加速度计和陀螺仪的值。
在setup函数中,初始化MPU6050并打开串口通信。
```cpp#include <Wire.h>#include <MPU6050.h>int16_t accel_x, accel_y, accel_z;int16_t gyro_x, gyro_y, gyro_z;void setuWire.begin(;mpu.initialize(;Serial.begin(9600);}```4.数据读取:在loop函数中,使用mpu.getMotion6函数读取加速度计和陀螺仪的数据。
您可以使用Serial.print函数将这些值打印到串口监视器中。
```cppvoid loompu.getMotion6(&accel_x, &accel_y, &accel_z, &gyro_x, &gyro_y, &gyro_z);Serial.print("Accel: ");Serial.print(accel_x);Serial.print(" ");Serial.print(accel_y);Serial.print(" ");Serial.println(accel_z);Serial.print("Gyro: ");Serial.print(gyro_x);Serial.print(" ");Serial.print(gyro_y);Serial.print(" ");Serial.println(gyro_z);delay(100); // 数据读取延迟}```5.数据解释:加速度计和陀螺仪的值是原始数据,单位为每个轴的原始计数。
姿态角解算(MPU6050 加速度计加陀螺仪)本文持续更新…I2C通信AHRS是自动航向基准系统(Automatic Heading Reference System)的简称。
目前,使用四元数来进行AHRS姿态解算的算法被广泛采用于四轴飞行器上。
IMU部分:IMU是惯性测量装置(Inertial Measurement Unit)的简称,通常包含陀螺仪和加速度计。
1.陀螺仪:测量的是角速度,即物体转动的速度,把速度和时间相乘,即可以得到某一时间段内物体转过的角度。
(但是积分运算得来的角度本身就存在误差,随着时间的累加,误差会加剧,此时就需要加速度计辅助计算出姿态角度)2.加速度计:测量的是物体的加速度,我们知道,重力加速度是一个物体受重力作用的情况下所具有的加速度。
当物体处于静止状态时,加速度计测量出来的值就等于重力加速度1g, 约等于9.8米每平方秒。
重力加速度g的方向总是竖直向下的,通过获得重力加速度在其X轴,Y轴上的分量,我们可以计算出物体相对于水平面的倾斜角度。
典型的IMU惯性测量芯片为MPU6050,它被广泛采用在四轴飞行器上。
mpu6050便是这两种传感器结合测出姿态角,通常运用卡尔曼滤波得出最终角度根据加速度计和地磁计的数据,转换到地理坐标系后,与对应参考的重力向量和地磁向量进行求误差,这个误差用来校正陀螺仪的输出,然后用陀螺仪数据进行四元数更新,再转换到欧拉角陀螺仪的角速度测量:如果他的速度是1度不加秒,我们用速度乘以时间就可以知道他从起点走了多少度。
加速度计来测量倾角:一个简单的例子如下: 一个单轴的加速计位于重力水平面上的时候,它在垂直方向上受到的加速度为1g,在水平方向上受到的加速度为0。
当我们把它旋转一个角度的时候,就会在水平轴上产生一个加速度分量。
通过它们的关系,就可以计算出该单轴加速计的倾角。
1.通过陀螺仪的积分来获得四轴的旋转角度2.然后通过加速度计的比例和积分运算来修正陀螺仪的积分结果。
1.//技术文档未公布的寄存器主要用于官方DMP操作2.#define MPU6050_RA_XG_OFFS_TC 0x00 //[bit7] PWR_MODE, [6:1] XG_OFFS_TC, [bit 0]OTP_BNK_VLD3.#define MPU6050_RA_YG_OFFS_TC 0x01 //[7] PWR_MODE, [6:1] YG_OFFS_TC, [0] OTP_BNK_VLD4.//bit7的定义,当设置为1,辅助I2C总线高电平是VDD。
当设置为0,辅助I2C总线高电平是VLOGIC5.6.#define MPU6050_RA_ZG_OFFS_TC 0x02 //[7] PWR_MODE, [6:1] ZG_OFFS_TC, [0] OTP_BNK_VLD7.#define MPU6050_RA_X_FINE_GAIN 0x03 //[7:0] X_FINE_GAIN8.#define MPU6050_RA_Y_FINE_GAIN 0x04 //[7:0] Y_FINE_GAIN9.#define MPU6050_RA_Z_FINE_GAIN 0x05 //[7:0] Z_FINE_GAIN10.11.#define MPU6050_RA_XA_OFFS_H 0x06 //[15:0] XA_OFFS 两个寄存器合在一起12.#define MPU6050_RA_XA_OFFS_L_TC 0x0713.14.#define MPU6050_RA_YA_OFFS_H 0x08 //[15:0] YA_OFFS 两个寄存器合在一起15.#define MPU6050_RA_YA_OFFS_L_TC 0x0916.17.#define MPU6050_RA_ZA_OFFS_H 0x0A //[15:0] ZA_OFFS 两个寄存器合在一起18.#define MPU6050_RA_ZA_OFFS_L_TC 0x0B19.20.#define MPU6050_RA_XG_OFFS_USRH 0x13 //[15:0] XG_OFFS_USR 两个寄存器合在一起21.#define MPU6050_RA_XG_OFFS_USRL 0x1422.23.#define MPU6050_RA_YG_OFFS_USRH 0x15 //[15:0] YG_OFFS_USR 两个寄存器合在一起24.#define MPU6050_RA_YG_OFFS_USRL 0x1625.26.#define MPU6050_RA_ZG_OFFS_USRH 0x17 //[15:0] ZG_OFFS_USR 两个寄存器合在一起27.#define MPU6050_RA_ZG_OFFS_USRL 0x1828.29./*陀螺仪的采样频率*/30./*传感器的寄存器输出,FIFO输出,DMP采样、运动检测、31.*零运动检测和自由落体检测都是基于采样率。