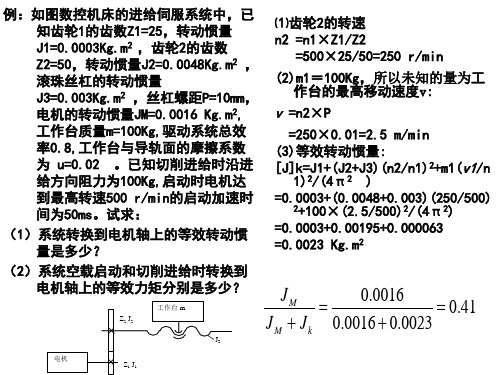
机电一体化 计算题题库
- 格式:ppt
- 大小:816.00 KB
- 文档页数:27

机电专业一体化试题及答案一、选择题(每题2分,共20分)1. 机电一体化系统的基本组成包括:A. 机械系统B. 电子系统C. 控制系统D. 所有以上选项答案:D2. 下列哪个不是机电一体化系统的特点?A. 高精度B. 高可靠性C. 低效率D. 集成度高答案:C3. 伺服电机主要用于:A. 精确控制位置B. 产生大扭矩C. 快速启动和停止D. 所有以上选项答案:A4. PLC(可编程逻辑控制器)的主要功能是:A. 数据存储B. 逻辑控制C. 人机交互D. 所有以上选项答案:B5. 传感器在机电一体化系统中的作用是:A. 检测外部信号B. 转换信号C. 执行控制命令D. 所有以上选项答案:A6. 以下哪个不是机械传动元件?A. 齿轮B. 皮带C. 电机D. 轴承答案:C7. 以下哪个是机电一体化系统中常用的传感器类型?A. 温度传感器B. 压力传感器C. 光敏传感器D. 所有以上选项答案:D8. 以下哪个不是机电一体化系统的执行元件?A. 电机B. 液压缸C. 传感器D. 气动缸答案:C9. 以下哪个是机电一体化系统中常用的控制策略?A. PID控制B. 模糊控制C. 神经网络控制D. 所有以上选项答案:D10. 以下哪个是机电一体化系统设计时需要考虑的因素?A. 成本B. 性能C. 可靠性D. 所有以上选项答案:D二、简答题(每题10分,共30分)1. 简述机电一体化系统与传统机械系统的区别。
答案:机电一体化系统与传统机械系统的主要区别在于,机电一体化系统将机械系统与电子系统、控制系统相结合,实现了高度的集成和自动化。
它通过传感器检测外部信号,利用电子系统进行信号处理,并通过控制系统实现精确的控制,从而提高系统的精度、效率和可靠性。
2. 解释什么是伺服电机,并简述其工作原理。
答案:伺服电机是一种高精度的电机,它能够根据输入的控制信号精确地控制电机的转速和位置。
伺服电机的工作原理是,通过编码器检测电机的实际位置,将位置信号反馈给控制系统,控制系统根据位置误差调整电机的输入,从而实现精确控制。
机电一体化类专业计算综合题
一、计算题
1.将电感量为L=255mH纯电感线圈与阻值为60Ω的电阻串联后,接到工频电源上,用万用表测得电阻两端电压为132V,求(1)电感两端的电压;(2)电路中的P、Q。
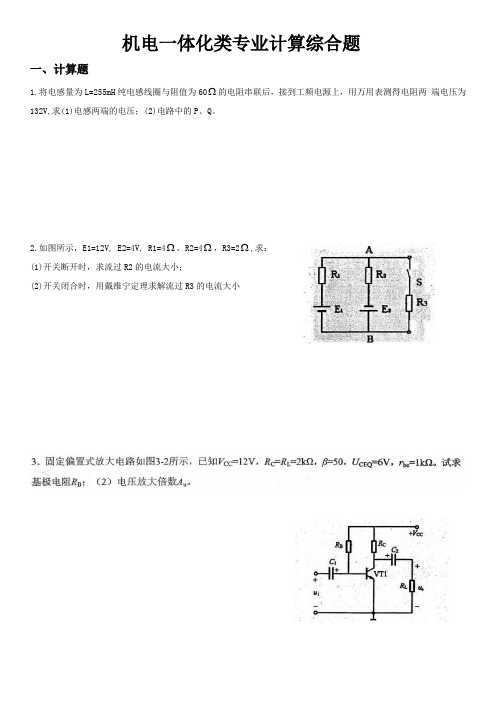
2.如图所示,E1=12V, E2=4V, R1=4Ω,R2=4Ω,R3=2Ω,求:
(1)开关断开时,求流过R2的电流大小;
(2)开关闭合时,用戴维宁定理求解流过R3的电流大小
二、综合应用题
1. 某同学进行电动机点动与连续运行控制电路的实训操作。
(1)请将图所示的原理图补画完整•
(2) 若通过PLC实现控制,请根据图所示的I/O接线图,将梯形图补画完整。
(3)FR-E740变频器控制的电动机点动与连续控制电路如图所示,
①说明要使电动机连续工作,按钮和开关的操作顺序;
②要使电动机处于点动工作状态,Pr.79=2,操作SA来实现点动,此时需闭合SB,更改Pr.l82=5,此更改的目的是什么?③设置点动速度及加减速时间需分别设置哪两个参数?
2. 读懂装配图,回答下列问题。
(1)该装配体由个零件组成,其中标准件种。
(2)该装配体共采用个视图表达,其中主视图釆用的是剖视图。
(3)判断下列尺寸的类型:0〜146是寸,237是尺寸。
(4)从K向看,若件4逆时针转动,件2向移动(向左或向右)。
(5)尺寸 30H9/f9是件2与件的制配合.。
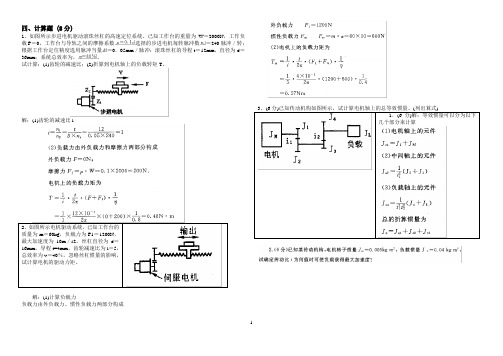
四、计算题 (8分)1、如图所示步进电机驱动滚珠丝杠的高速定位系统。
已知工作台的重量为W =2000N ,工作负载F =0,工作台与导轨之间的摩擦系数选择的步进电机每转脉冲数=240脉冲/转;根据工作台定位精度选用脉冲当量=0.05mm /脉冲;滚珠丝杠的导程t =12mm ,直径为d =36mm ;系统总效率为,。
试计算:(1)齿轮的减速比;(2)折算到电机轴上的负载转矩T 。
解:(1)齿轮的减速比i2、如图所示电机驱动系统,已知工作台的质量为m=60kg ,负载力为F1=1200N ,最大加速度为10m /s2,丝杠直径为d =16mm ,导程t=4mm ,齿轮减速比为i =5,总效率为v =40%,忽略丝杠惯量的影响,试计算电机的驱动力矩。
解:(1)计算负载力负载力由外负载力、惯性负载力两部分构成1.(6分)解:等效惯量可以分为以下几个部分来计算1、设有一大功率电动机驱动的二级齿轮传动减速传动系统如图所示,假设齿轮箱的传动效率为100%,齿轮箱的传动比i=3.2,已知齿轮采用相同材料,宽度b 相同,各齿轮的模数m=3,主动齿轮的齿数z 1=20、z 3=25,请根据重量最小原则设计齿轮传动系统,推导并计算各级齿轮传动比和齿轮2、齿轮4的齿数。
(提示:齿轮的质量为ρπb mz 4)(2)解:设一级齿轮的传动比为i 1,第二级齿轮的传动比i 2。
齿轮传动系统的总重量:()()()()[]2222222224321Z Z Z Z bm M +++=πρ 则()⎥⎥⎦⎤⎢⎢⎣⎡⎪⎪⎭⎫ ⎝⎛⎪⎪⎭⎫ ⎝⎛+++=212321214112i i z i z M bmπρ 根据重量最小原则,令01=∂∂i M,得: 213131===i z z i D D i ,i 2=3.2/2=1.6 则:z 2=40、z 4=402、设有一小功率电动机驱动的二级齿轮传动减速系统如图所示,假设齿轮箱的传动效率为100%,齿轮箱的总传动比i=2,已知齿轮采用相同材料,齿轮的宽度相等,各齿轮的模数m=4,主动齿轮的齿数:z 1=z 3=30,请根据转动惯量最小原则设计齿轮传动系统,计算各级齿轮传动比和齿轮2、齿轮4的齿数。
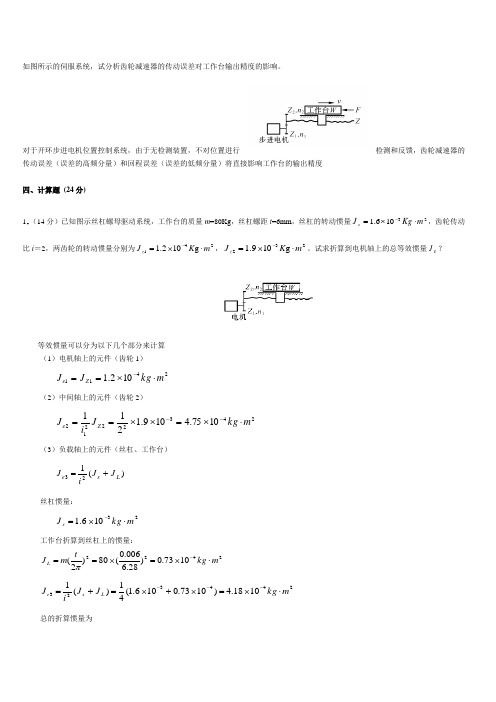
如图所示的伺服系统,试分析齿轮减速器的传动误差对工作台输出精度的影响。
对于开环步进电机位置控制系统,由于无检测装置,不对位置进行检测和反馈,齿轮减速器的传动误差(误差的高频分量)和回程误差(误差的低频分量)将直接影响工作台的输出精度四、计算题 (24分)1.(14分)已知图示丝杠螺母驱动系统,工作台的质量m =80Kg ,丝杠螺距t =6mm ,丝杠的转动惯量23106.1m Kg J s ⋅⨯=-,齿轮传动比i =2,两齿轮的转动惯量分别为241g 102.1m K J z ⋅⨯=-,232g 109.1m K J z ⋅⨯=-。
试求折算到电机轴上的总等效惯量J e ?等效惯量可以分为以下几个部分来计算 (1)电机轴上的元件(齿轮1)2411102.1m kg J J Z e ⋅⨯==-(2)中间轴上的元件(齿轮2)243222121075.4109.1211m kg J i J Z e ⋅⨯=⨯⨯==-- (3)负载轴上的元件(丝杠、工作台))(123L s e J J iJ +=丝杠惯量:23106.1m kg J s ⋅⨯=-工作台折算到丝杠上的惯量:24221073.0)28.6006.0(80)2(m kg t m J L ⋅⨯=⨯==-π 2443231018.4)1073.0106.1(41)(1m kg J J iJ L s e ⋅⨯=⨯+⨯=+=--- 总的折算惯量为23444321.10013.11018.41075.4102.1m kg J J J J e e e e ----⨯=⨯+⨯+⨯=++=2.(10分)如图所示电机驱动系统,已知工作台的质量为m =60Kg ,负载力为N 1200=l F ,最大加速度为10m/s 2,丝杠直径为d =16mm ,导程t =4mm ,齿轮减速比为i =5,总效率为%40=η,忽略丝杠惯量的影响,试计算电机的驱动力矩。
(1)计算负载力负载力由外负载力、惯性负载力两部分构成 外负载力 N F l 1200=惯性负载力m FNa m F m 6001060=⨯=⋅=(2)电机上的负载力矩为NmF F t i T m l m 57.04.01)6001200(2104511)(213=⋅+⋅⨯⋅=⋅+⋅⋅=-πηπ 五、综合题(16分)已知某物料搬动机械手的结构与动作过程如图所示,要求机械手的操作方式分为手动方式和自动方式。
机电一体化技术习题一、单项选择题(本大题共14小题,每小题1分,共14分)在每小 题列出的四个选项中只有一个选项是符合题目要求的,请将正确选项 前的字母填在题后的括号内。
1. 受控变量是机械运动的一种反馈控制系统称() A. 顺序控制系统 B.伺服系统C.数控机床D.工业机器人2. 齿轮传动的总等效惯量随传动级数()A.增加而减小 B.增加而增加 C.减小而减小 D.变化而不变3. 滚珠丝杠螺母副结构类型有两类:外循环插管式和() A. 内循环插管式 B.外循环反向器式 C.内、外双循环 D.内循环反向器式4. 某光栅的条纹密度是100条/mm,光栅条纹间的夹角0 =0.001孤度,则莫 尔条纹的宽度是()A. 100mmB.20mmC.lOmmD.O.lmm5. 直流测速发电机输出的是与转速()8. 右图称()A. 直流伺服电动机调节特性B. 直流伺服电动机机械特性C. 直流伺服电动机动态特性D. 直流伺服电动机调速特性9. 计算步进电动机转速的公式为()36。
" 180° 60f 360°A. mz’cB.Ts m cos meC. mz r cD. 180° - me10. 一般说来,如果增大幅值穿越频率3c 的数值,则动态性能指标中的调整 时间ts ()A.增大B.减小C.不变D.不定A.成正比的交流电压 C.成正比的直流电压B. 成反比的交流电压D.成反比的直流电压 6. 电压跟随器的输出电压( A.大于 B.大于等于 )输入电压。
C.等于D.小于 7.某4极交流感应电动机, 电源频率为50Hz,当转差率为0.02时,其转速为 A.1450 [r/min] C. 735 [r/min]B. 1470 [r/min] D. 2940 [r/min]11.已知f(t)=a+bt,则它的拉氏变换式为()a a ab a a b_ + _ + _+A. s +bB. s s2C. s s2D. s s312.连续路径控制类中为了控制工具沿任意直线或曲线运动,必须同时控制每一个轴的()使得它们同步协调到达目标点。
大专机电考试题目和答案一、单项选择题(每题2分,共20分)1. 机电一体化系统通常由哪些主要部分组成?A. 机械系统、电子系统、控制系统B. 机械系统、电气系统、计算机系统C. 机械系统、电子系统、计算机系统D. 机械系统、电气系统、控制系统答案:A2. 在机械设计中,以下哪项不是传动机构的主要类型?A. 齿轮传动B. 链条传动C. 皮带传动D. 液压传动答案:D3. 以下哪种传感器不是基于光电效应工作的?A. 光电二极管B. 光电晶体管C. 热电偶D. 光电倍增管答案:C4. PLC(可编程逻辑控制器)的主要功能是什么?A. 数据存储B. 信号放大C. 逻辑控制D. 能源管理答案:C5. 以下哪种材料不适合用于制造高温环境下的机械部件?A. 不锈钢B. 铝合金C. 钛合金D. 聚四氟乙烯答案:B6. 伺服电机与普通电机的主要区别是什么?A. 伺服电机具有更高的功率B. 伺服电机具有更好的控制精度C. 伺服电机成本更低D. 伺服电机体积更小答案:B7. 在数控加工中,G代码用于表示什么?A. 刀具编号B. 机床坐标系C. 程序段D. 机床操作指令答案:D8. 以下哪种润滑方式不属于自动润滑系统?A. 油雾润滑B. 滴油润滑C. 压力润滑D. 手动润滑答案:D9. 以下哪种测量仪器用于测量物体的直线度?A. 千分尺B. 百分表C. 水平仪D. 直线度测量仪答案:D10. 以下哪种焊接方法不适用于薄板材料?A. 电弧焊B. 激光焊C. 电子束焊D. 电阻焊答案:A二、多项选择题(每题3分,共15分)11. 以下哪些因素会影响机械系统的稳定性?A. 材料特性B. 工作环境C. 操作人员技能D. 系统设计答案:A, B, D12. 以下哪些是机电一体化系统设计时需要考虑的因素?A. 系统的经济性B. 系统的可靠性C. 系统的安全性D. 系统的环保性答案:A, B, C, D13. 在机械加工中,以下哪些是常见的加工误差来源?A. 刀具磨损B. 机床振动C. 材料硬度D. 操作失误答案:A, B, D14. 以下哪些是电气控制系统中常用的保护元件?A. 熔断器B. 过载继电器C. 接触器D. 断路器答案:A, B, D15. 以下哪些是现代机电一体化系统的特点?A. 高度自动化B. 智能化C. 网络化D. 模块化答案:A, B, C, D三、判断题(每题2分,共10分)16. 机械系统的效率总是100%。
机电一体化考试试题一、选择题(每题2分,共20分)1. 电机的转速与电源频率和极对数的关系是:A. 转速与频率成正比,与极对数成反比B. 转速与频率成反比,与极对数成正比C. 转速与频率和极对数无关D. 转速与频率成正比,与极对数成正比2. 以下哪个不是传感器的主要功能?A. 将非电信号转换为电信号B. 放大信号C. 信号处理D. 信号的采集3. PLC的全称是:A. Power Line CommunicationB. Programmable Logic ControllerC. Personal Learning CurveD. Portable Learning Center4. 伺服电机与普通电机的主要区别在于:A. 伺服电机可以进行位置控制B. 伺服电机的转速更快C. 伺服电机的体积更小D. 伺服电机的功率更大5. 以下哪个不是机械传动元件?A. 齿轮B. 皮带C. 链条D. 电阻6. 机器人的自由度是指:A. 机器人的关节数量B. 机器人可以进行的独立运动方向的数量C. 机器人的臂长D. 机器人的重量7. 液压传动系统的主要组成部分不包括:A. 液压泵B. 液压缸C. 液压阀D. 电机8. 以下哪个是数控机床的组成部分?A. 伺服系统B. 液压系统C. 机械手D. 传感器9. 工业4.0的核心是:A. 云计算B. 物联网C. 大数据分析D. 人工智能10. 以下哪个不是机电一体化系统的特点?A. 高度集成B. 模块化设计C. 单一功能D. 自动化控制二、简答题(每题10分,共30分)1. 简述机电一体化系统的基本组成。
2. 描述数控机床的工作原理。
3. 解释伺服系统在工业自动化中的应用。
三、计算题(每题25分,共50分)1. 已知一个三相异步电机的额定功率为7.5kW,额定电压为380V,额定电流为15A,求其功率因数。
2. 一个液压系统需要将一个重500kg的物体提升到2米的高度,液压缸的面积为100cm²,求液压系统需要的压力。
一、选择题1、用于传递、承载力和运动的模块为()。
A 机械受控模块B 驱动模块C 接口模块D 微计算机模块2、导轨块用于引导运动部件的走向,某导规面具有相同的极性装置,利用同性相斥原理使导规面脱离接触,若按导规面间的摩擦性质分类,该导规为()。
A 滑动导规B 液体静压导规C 气浮导规D 磁浮导规3、滚珠丝杠螺母副一般采用消除间隙和适当的预紧措施,最简单,尺寸最紧凑,且价格低廉的调查整方法是()。
A 双螺线齿差式B 双螺母螺纹式C 双螺母垫片式D 单螺线变位导程式4、能消除零位输出和偶次非线性项,抵销共模误差,减少非线性,这种用()。
A 平均技术B 差动技术C 开环技术D 闭环技术5、下列技术能减少直流伺服电动机机电时间常数的是()。
A 增加等效转动惯量B 增加电枢回路电阻C 附加速度负反馈D 减少电动机转矩系数6、在小功率PWM伺服放大器中,主回路经常使用CDMOS功率场效应管代替IGBT,其中VD的含义是()。
A 功率场效应管B 功率晶体管C 绝缘栅晶体管D 电感应晶体管7、PID中I的含义是()A 比例B 积分C 微分D 前置8、在具有位置环的全闭环交流伺服系统中,取自伺服电动机轴上的编码器的反馈通常构成()。
A 位置环B 电流环C 速度环D 转矩环9、满足中等性能要求的西门子S7系列模块化小型PLC是A SIMATIC S7-300PLC10、设计梯形图时串联一个动断触点0.00对应的助记符是()A LD 0.00B LDNOT 0.00C AND 0.00 D ANDNOT 0.002、简答题1、伺服系统的工作特点是什么?2、简述单谐波齿轮传动和双谐波齿轮传动的含义,并说明为什么双谐波齿轮传动被广泛应用?3、三相感应电动机定子和转子之间的气隙是怎样的磁场?该磁场是如何产生的?4、简述反应式步进电动机的工作原理和特点?5、步进电动机驱动产品中单脉冲方式和双脉冲方式有何不同?6、选择采样周期应遵循什么准则?7、采用DDA法在两轴定位工作台上实现直线插补,采用常速度分布实现直线指令时需要几个寄存器,如何分配使用这些寄存器产生的步进电动机的指令?3、计算题1、某滚珠丝杠螺线副,结构参为,丝杠直径为40MM,滚珠直径为6.35MM,每个螺母单元有3个滚珠环道,据此查系数为bst≈3。