逆矩阵与伴随矩阵
- 格式:pptx
- 大小:1019.90 KB
- 文档页数:2
求矩阵逆的方法
方法一,伴随矩阵法。
对于一个n阶矩阵A,如果其行列式不为0,那么A就是可逆的。
我们可以通过求解伴随矩阵来得到A的逆矩阵。
首先,我们计算A的伴随矩阵Adj(A),然后用行列式的倒数乘以伴随矩阵即可得到A的逆矩阵。
方法二,初等变换法。
初等变换法是通过一系列的行变换将原矩阵变换为单位矩阵,然后将单位矩阵变换为A的逆矩阵。
这种方法在计算机求解中比较常见,可以通过高斯消元法来实现。
方法三,分块矩阵法。
对于某些特殊的矩阵,我们可以通过将其分解成若干个子矩阵,从而简化逆矩阵的求解过程。
例如,对角矩阵、上三角矩阵、下三角矩阵等都有相对简单的逆矩阵求解方法。
方法四,特征值分解法。
对于对称正定矩阵,我们可以通过其特征值和特征向量来求解其逆矩阵。
通过特征值分解和特征向量矩阵的转置,我们可以得到原矩阵的逆矩阵。
方法五,数值逼近法。
对于大型矩阵或者特殊结构的矩阵,有时候我们无法通过解析的方法求解其逆矩阵,这时可以通过数值逼近的方法来计算其逆矩阵。
例如,利用迭代法或者矩阵分解等方法来近似求解逆矩阵。
总结:
以上是几种常见的求解矩阵逆的方法,不同的方法适用于不同类型的矩阵。
在实际问题中,我们需要根据具体情况选择合适的方法来求解矩阵的逆,以便更好地解决实际问题。
希望本文能够对您有所帮助,谢谢阅读!。
逆矩阵的计算方法逆矩阵在线性代数中扮演着重要的角色,它在解线性方程组、求解线性变换的逆变换等方面具有重要的应用价值。
本文将介绍逆矩阵的计算方法,希望能够帮助读者更好地理解和掌握这一概念。
首先,我们需要明确什么是逆矩阵。
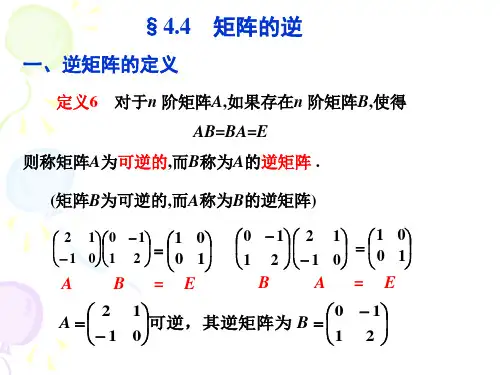
对于一个n阶方阵A,如果存在另一个n 阶方阵B,使得AB=BA=In(其中In为n阶单位矩阵),那么我们称B是A的逆矩阵,记作A^-1。
逆矩阵的存在与否对于方阵的可逆性有着重要的意义。
接下来,我们将介绍逆矩阵的计算方法。
在实际应用中,我们通常采用以下两种方法来计算逆矩阵。
一、初等行变换法。
初等行变换法是一种常用的计算逆矩阵的方法。
我们可以通过对原矩阵进行一系列的初等行变换,将原矩阵变换成单位矩阵,此时原矩阵经过的一系列变换即为逆矩阵。
具体步骤如下:1. 将原矩阵A与单位矩阵In拼接在一起,即构成一个2n阶的矩阵[A | In]。
2. 通过一系列的初等行变换,将矩阵[A | In]变换成[In | B],此时B即为原矩阵A的逆矩阵。
需要注意的是,初等行变换包括三种操作,互换两行、某一行乘以一个非零常数、某一行加上另一行的若干倍。
在进行初等行变换的过程中,需要保证每一步的变换都是可逆的,以确保得到的逆矩阵是正确的。
二、伴随矩阵法。
另一种常用的计算逆矩阵的方法是伴随矩阵法。
对于一个n阶方阵A,其逆矩阵可以通过以下公式计算得到:A^-1 = (1/|A|)·adj(A)。
其中|A|为A的行列式,adj(A)为A的伴随矩阵。
伴随矩阵的计算过程较为复杂,需要先求出原矩阵A的代数余子式矩阵,然后将其转置得到伴随矩阵。
需要注意的是,以上两种方法都要求原矩阵是可逆的,即其行列式不为0。
如果原矩阵不可逆,则不存在逆矩阵。
在实际应用中,我们可以根据具体问题的特点选择合适的计算方法。
初等行变换法适用于一般的矩阵求逆问题,而伴随矩阵法则在理论推导和证明中有着重要的作用。
总之,逆矩阵的计算方法是线性代数中的重要内容,它在解决线性方程组、求解线性变换的逆变换等问题中具有广泛的应用。

a的逆的伴随等于a的伴随的逆证明主题:a的逆的伴随等于a的伴随的逆证明在线性代数中,矩阵的逆和伴随是非常重要的概念。
它们在解线性方程组、求解矩阵的特征值和特征向量等方面起着关键作用。
而关于矩阵逆和伴随的性质之一就是:矩阵a的逆的伴随等于a的伴随的逆。
本文将对这一性质进行深入探讨,并给出证明过程。
1. 矩阵的逆在线性代数中,对于一个n阶方阵A,如果存在另一个n阶方阵B,使得AB=BA=I(其中I为单位矩阵),则称B是A的逆矩阵,记作A^-1。
矩阵存在逆矩阵的充分必要条件是矩阵A是可逆的。
2. 矩阵的伴随对于n阶方阵A,定义它的伴随矩阵为adj(A),其中adj(A)的元素是A的代数余子式。
伴随矩阵在求解矩阵的逆、计算矩阵的幂等问题中具有重要作用。
3. 证明:a的逆的伴随等于a的伴随的逆现在来证明性质:矩阵a的逆的伴随等于a的伴随的逆。
假设矩阵A是可逆的,则A的逆矩阵记为A^-1。
我们有以下证明过程:(1)证明A^-1的伴随是adj(A)的逆由伴随矩阵的性质可知,对于任意的n阶方阵A,有A*adj(A)=det(A)I(其中det(A)为A的行列式)。
A*adj(A)是一个数量,记作k。
(2)证明A的伴随的逆是(A^-1)的伴随我们知道,A的伴随矩阵的元素是A的代数余子式,记为adj(A)=(A_ij),其中A_ij是矩阵A的第i行第j列元素的代数余子式。
则A的伴随的逆矩阵记为(adj(A))^-1。
(3)结合(1)和(2),得出结论因为A*adj(A)是一个数量k,而A*adj(A)=det(A)I,所以A*adj(A)的逆矩阵是1/det(A)*I。
我们得出结论:矩阵a的逆的伴随等于a的伴随的逆。
这一性质在矩阵运算、线性方程组求解等领域具有重要的理论意义和实际应用价值。
4. 个人观点和理解对于矩阵的逆和伴随,我深有体会。
在实际工程问题中,常常需要对矩阵进行求逆操作,或者利用伴随矩阵来解决相关问题。
逆矩阵求解方法及matlab应用矩阵是线性代数中的基本概念,它广泛应用于各个领域中。
在实际应用中,矩阵求解是一项非常重要的工作,而逆矩阵是矩阵求解中的一个重要概念。
本文将介绍逆矩阵的概念、求解方法以及在matlab 中的应用。
一、逆矩阵的概念逆矩阵是矩阵求解中的一个重要概念,它是指对于一个n阶方阵A,存在一个n阶方阵B,使得AB=BA=I,其中I为n阶单位矩阵。
如果一个矩阵存在逆矩阵,那么它就是可逆矩阵,否则就是不可逆矩阵。
二、逆矩阵的求解方法1.初等变换法初等变换法是求解逆矩阵的一种基本方法,它是通过对矩阵进行初等行变换或初等列变换,得到一个单位矩阵,然后将这些变换逆序执行,就可以得到原矩阵的逆矩阵。
以3阶方阵为例,假设原矩阵为A,逆矩阵为B:(1)将A的行列式化为1对A进行初等行变换,将第一行除以A的行列式,得到:(2)将A的第一列化为单位矩阵对A进行初等列变换,将第一列变为单位矩阵,得到:(3)将A的第二列和第三列化为0对A进行初等列变换,将第二列和第三列分别变为0,得到:(4)将A的第二行和第三行化为单位矩阵对A进行初等行变换,将第二行和第三行分别变为单位矩阵,得到:(5)将A的第一列变为0对A进行初等列变换,将第一列变为0,得到:(6)将A的第一行变为0对A进行初等行变换,将第一行变为0,得到:最终得到的矩阵就是逆矩阵B。
2.伴随矩阵法伴随矩阵法是求解逆矩阵的另一种方法,它通过求解伴随矩阵和行列式,得到逆矩阵。
以3阶方阵为例,假设原矩阵为A,逆矩阵为B:(1)求解伴随矩阵首先求解A的伴随矩阵Adj(A):(2)求解行列式然后求解A的行列式det(A):(3)求解逆矩阵最后,将伴随矩阵的每个元素除以行列式,得到逆矩阵B:三、matlab中逆矩阵的应用在matlab中,可以使用inv函数来求解逆矩阵。
inv函数的语法格式为:B = inv(A)其中A为原矩阵,B为逆矩阵。
例如,如果要求解以下3阶方阵的逆矩阵:则可以使用以下代码:A = [1 2 3; 2 5 6; 3 6 9];B = inv(A)运行结果为:B =-3.0000 2.0000 -0.00002.0000 -1.0000 1.0000-0.0000 1.0000 -0.0000可以看到,matlab计算得到的逆矩阵与手工计算得到的逆矩阵相同。

矩阵求逆伴随矩阵方法矩阵求逆伴随矩阵方法可以用来求解矩阵的逆矩阵。
逆矩阵是指能够将原矩阵乘上一个逆矩阵得到单位矩阵的矩阵。
矩阵的逆不存在的情况下,就无法使用逆矩阵求解方程组等一系列问题。
因此,求解逆矩阵是非常重要的。
在矩阵求逆伴随矩阵方法中,首先需要求出矩阵的伴随矩阵。
伴随矩阵也被称为伪逆矩阵或伪反转矩阵,它的作用是将原矩阵变成一个具有相似特征的矩阵。
伴随矩阵的求解需要用到矩阵的行列式和余子式,这些数学概念需要在数学基础中学习。
矩阵的伴随矩阵可以使用如下公式进行计算:$$ A^{-1}=\frac{1}{\left| A\right|}\textbf{A}^*_i^j $$ 其中,$\textbf{A}^*_i^j$表示矩阵$\textbf{A}$的余子式。
需要注意的是,只有方阵才有伴随矩阵和逆矩阵,非方阵只有伪逆矩阵。
另外,在计算矩阵的逆矩阵时,需要注意矩阵的行列式是否为0,如果行列式为0,则矩阵不存在逆矩阵。
矩阵求逆伴随矩阵方法的步骤如下:1. 求解矩阵的行列式$\left| A\right|$(需要保证矩阵为方阵);2. 求解矩阵的余子式$\textbf{A}^*_i^j$(需要保证矩阵为方阵); 3. 根据公式$\textbf{A}^{-1}=\frac{1}{\left|\textbf{A}\right|}\textbf{A}^*_i^j$计算矩阵的逆矩阵。
有了逆矩阵,我们就可以使用矩阵乘法来求解方程组等问题。
例如,对于方程组$\textbf{Ax}=\textbf{b}$,如果矩阵$\textbf{A}$存在逆矩阵,那么我们可以将方程组变形为$\textbf{x}=\textbf{A}^{-1}\textbf{b}$,然后使用逆矩阵求解向量$\textbf{x}$的值。
除了矩阵求逆伴随矩阵方法,还有其他求逆矩阵的方法,例如高斯-约旦消元法、LU分解法、Jacobi迭代法等。
每种方法都有其适用范围和注意事项,需要根据实际情况选择合适的求解方法。
伴随矩阵求逆矩阵例题摘要:1.伴随矩阵的概念及其性质2.利用伴随矩阵求逆矩阵的方法3.例题讲解4.总结与扩展正文:一、伴随矩阵的概念及其性质伴随矩阵是线性代数中一种重要的矩阵,与一个矩阵A 密切相关。
伴随矩阵B(A) 的元素是矩阵A 的代数余子式,即B(A) 的第i 行第j 列的元素为A 的第(j-i) 行第(i-1) 列的代数余子式。
伴随矩阵具有以下性质:1.伴随矩阵的转置等于原矩阵的逆矩阵,即B(A)^T = A^-1。
2.伴随矩阵的行列式等于原矩阵的行列式的相反数,即det(B(A)) = -det(A)。
二、利用伴随矩阵求逆矩阵的方法根据伴随矩阵的性质,可以得到求逆矩阵的公式:A^-1 = B(A)^T。
利用这个公式,可以通过计算伴随矩阵来求解逆矩阵。
三、例题讲解例1:求下列矩阵的逆矩阵:begin{bmatrix}1 &2 & 37 & 8 & 9end{bmatrix}解:先计算伴随矩阵B(A):begin{bmatrix}-3 & -6 & -9-8 & -10 & -12-7 & -8 & -9end{bmatrix}然后计算B(A)^T:begin{bmatrix}-3 & 6 & 98 & 10 & 127 & 8 & 9end{bmatrix}最后,A^-1 = B(A)^T = begin{bmatrix} -3 & 6 & 98 & 10 & 127 & 8 & 9end{bmatrix}例2:求下列矩阵的逆矩阵:begin{bmatrix}0 & 2 & 00 & 0 & 3end{bmatrix}解:先计算伴随矩阵B(A):begin{bmatrix}2 & 0 & 00 & 3 & 00 & 0 & 1end{bmatrix}然后计算B(A)^T:begin{bmatrix}2 & 0 & 00 & 3 & 00 & 0 & 1end{bmatrix}最后,A^-1 = B(A)^T = begin{bmatrix} 2 & 0 & 00 & 3 & 00 & 0 & 1end{bmatrix}四、总结与扩展本篇文章介绍了如何利用伴随矩阵求逆矩阵的方法,通过计算伴随矩阵及其转置,可以方便地求得逆矩阵。
伴随矩阵伴随矩阵是一种特殊的矩阵,它与原矩阵有着密切的关系。
在介绍伴随矩阵之前,我们首先需要了解什么是逆矩阵。
逆矩阵是矩阵的一种重要概念。
在矩阵运算中,如果有一个矩阵A,存在另一个矩阵B,使得AB=BA=E(其中E是单位矩阵),那么我们称B是A的逆矩阵。
在这种情况下,A也被称为可逆矩阵。
如果一个矩阵A是可逆的,那么它的逆矩阵是唯一的。
然而,如果A不是可逆的,那么它仍然有一个唯一的伴随矩阵。
这个伴随矩阵可以通过以下方式计算:假设A是一个n x n的矩阵,它的元素是a_{ij}(1 <= i, j <= n)。
那么A 的伴随矩阵A*可以通过以下方式计算:A的元素是a_{ji}(1 <= i, j <= n),其中i是行索引,j是列索引。
换句话说,A的元素是A的元素在行列索引交换后的值。
例如,考虑一个3x3的矩阵A:A=[[a11,a12,a13],[a21,a22,a23],[a31,a32,a33]]那么A的伴随矩阵A*是:A*=[[a11,a21,a31],[a12,a22,a32],[a13,a23,a33]]在数学上,伴随矩阵有着重要的性质。
首先,伴随矩阵与原矩阵有着紧密的关系。
如果A是可逆的,那么AA*=A*A=E,其中E是单位矩阵。
这意味着伴随矩阵乘以原矩阵等于单位矩阵,反之亦然。
其次,伴随矩阵可以用来计算行列式的值。
行列式是矩阵的一种重要属性,它表示为一个值的代数表达式。
对于一个n x n的方阵A,其行列式定义为:|A|=det(A)=∏(i=1 to n) a_{ii}。
如果A是可逆的,那么其行列式的值可以通过伴随矩阵来计算:|A|=(-1)^n * det(A*)。
这是因为行列式的定义可以看作是对角线元素的乘积减去其他元素的乘积,而在计算伴随矩阵时,我们将元素的位置进行了交换,因此需要引入一个负号。
在实际应用中,伴随矩阵可以用于求解线性方程组、求解逆矩阵、进行矩阵分解等操作。
用伴随矩阵求逆的合理解释
伴随矩阵(Adjoint Matrix)也称为矩阵的伴随矩阵、伴随系数矩阵,它是线性代数中的
一种非常常见的概念,可以用来求解线性方程组,是矩阵求逆的一种高效方法。
首先,什么是伴随矩阵,伴随矩阵就是某个矩阵A的伴随矩阵C(A),它是定义在A矩阵上的,A具有n个行n个列,而C(A)具有n个行n个列,每个元素Cij与A互为伴随。
即,Cij=Aij,因此说伴随矩阵可以用来表示矩阵的逆的。
其次,为什么要使用伴随矩阵来求解矩阵的逆,由于可以大大简化计算量,使用伴随矩阵
来计算逆矩阵可以大大减少计算量,避免使用大量复杂的矩阵乘法。
例如,求解3阶矩阵
A的逆,其中Aij是3阶矩阵A中第i行第j列的元素,其计算量为O(n^4) ,而使用伴
随矩阵只需要O(n^3)的计算量。
此外,伴随矩阵也可以用于解决一些其他的数学问题,通过按行或按列求和计算,可以找
出不同的特征值及伴随矩阵。
可以利用这种方法来求解系统的几何形状,求解多隔计算机
图形的位置变换,从而推导出很多复杂的图形动画方法。
同时,利用伴随矩阵还可以解决
一些概率统计问题,可以在一系列重要变量之间找出成正比例的关系,从而求解概率问题。
最后,在线性代数中,伴随矩阵无疑是一种有效的矩阵求逆方法,它能够大大简化计算量,而且还可以拓展用于解决几何形状,图形动画及概率统计的问题等,也是数学中常用的线
性代数工具。
在总结,伴随矩阵可以用来求解矩阵的逆,是线性代数中的一种有用的工具,可以大大减
少计算量,同时还可以拓展用于解决更多的数学问题。

矩阵求逆的⼏种⽅法总结(C++)矩阵求逆运算有多种算法:1. 伴随矩阵的思想,分别算出其伴随矩阵和⾏列式,再算出逆矩阵;2. LU分解法(若选主元即为LUP分解法: Ax = b ==> PAx = Pb ==>LUx = Pb ==> Ly = Pb ==> Ux = y,每步重新选主元),它有两种不同的实现;A-1=(LU)-1=U-1L-1,将A分解为LU后,对L和U分别求逆,再相乘;通过解线程⽅程组Ax=b的⽅式求逆矩阵。
b分别取单位阵的各个列向量,所得到的解向量x就是逆矩阵的各个列向量,拼成逆矩阵即可。
下⾯是这两种⽅法的c++代码实现,所有代码均利⽤常规数据集验证过。
⽂内程序旨在实现求逆运算核⼼思想,某些异常检测的功能就未实现(如矩阵维数检测、矩阵奇异等)。
注意:⽂中A阵均为⽅阵。
伴随矩阵法C++程序:1 #include <iostream>2 #include <ctime> //⽤于产⽣随机数据的种⼦34#define N 3 //测试矩阵维数定义56//按第⼀⾏展开计算|A|7double getA(double arcs[N][N],int n)8 {9if(n==1)10 {11return arcs[0][0];12 }13double ans = 0;14double temp[N][N]={0.0};15int i,j,k;16for(i=0;i<n;i++)17 {18for(j=0;j<n-1;j++)19 {20for(k=0;k<n-1;k++)21 {22 temp[j][k] = arcs[j+1][(k>=i)?k+1:k];2324 }25 }26double t = getA(temp,n-1);27if(i%2==0)28 {29 ans += arcs[0][i]*t;30 }31else32 {33 ans -= arcs[0][i]*t;34 }35 }36return ans;37 }3839//计算每⼀⾏每⼀列的每个元素所对应的余⼦式,组成A*40void getAStart(double arcs[N][N],int n,double ans[N][N])41 {42if(n==1)43 {44 ans[0][0] = 1;45return;46 }47int i,j,k,t;48double temp[N][N];49for(i=0;i<n;i++)50 {51for(j=0;j<n;j++)52 {53for(k=0;k<n-1;k++)54 {55for(t=0;t<n-1;t++)56 {57 temp[k][t] = arcs[k>=i?k+1:k][t>=j?t+1:t];58 }59 }606162 ans[j][i] = getA(temp,n-1); //此处顺便进⾏了转置63if((i+j)%2 == 1)64 {65 ans[j][i] = - ans[j][i];66 }67 }68 }69 }7071//得到给定矩阵src的逆矩阵保存到des中。
逆矩阵(伴随矩阵法)算法过程:计算判断|A|是否为0利⽤原矩阵⽣成A*(伴随)矩阵,具体:A*⼆维数组中第[i][j]个元素,除去该⾏该列,其他元素进⼊临时数组,计算临时数组⾏列式值,即为A*[i][j]具体:最后矩阵A*/|A| 即为该矩阵的逆矩阵源码:#include<iostream>#include<iomanip>#include<cmath>using namespace std;//By Vove.float Cal_Det(float s[9][9],int n);//计算⾏列式|A|class Matrix{//矩阵⽅阵public:friend voidCal_Astar(Matrix &A);//计算A*friend floatCal_Aij(Matrix &A,int i,int j);//计算Aij->A*Matrix();void Input();void Cheak_IsSolvable();float CalDet_A();void Inverse_of_A();void ToAstar(int j,inti,float s){Astar[j][i]=s;}float getAkl(int k,intl){return A[k][l];}void Dis_A(floats[9][9]);void Display(int t);private:int n;//⾏,列r=cfloat A[9][9];//矩阵Afloat Astar[9][9]; //A*float Det_A; //|A|值float IOA[9][9]; //inverse of A A的逆矩阵};int main(){while(1){Matrix A;A.Input();A.Display(1); //输出矩阵AA.Cheak_IsSolvable();//检查是否可解Cal_Astar(A); //计算A*A.Inverse_of_A(); //计算A*/|A|A.Display(3); //输出逆矩阵}return 1;}void Cal_Astar(Matrix &A){for(int i=0;ifor(int j=0;jA.ToAstar(j,i,pow(-1,i j 2)*Cal_Aij(A,i,j));//存⼊A*数组A.Display(2);}float Cal_Aij(Matrix &A,int i,int j){float Aij[9][9]={0};int x=0,y=0; //Aij的下标for(int k=0;k //k l -> A的下标for(int l=0;lif(k!=i&&l!=j){Aij[x][y]=A.getAkl(k,l);y ;if(!(y%((A.n)-1))){//进位x ;y=0;}}}}return Cal_Det(Aij,(A.n)-1);}float Cal_Det(float s[9][9],int n){float sum=0; //存|A|值for(int i=0;iif(s[i][i]){//对⾓线元素不为0for(int m=i 1;mif(s[m][i]){float temp=-(s[m][i])/s[i][i];for(int p=0;ps[m][p]=s[m][p] temp*s[i][p];}else continue;}}else {//若对⾓线元素为0int m;for(m=i 1;mif(s[m][i]){//使对⾓线元素⾮0for(int p=0;ps[i][p]=s[m][p] s[i][p];break;}else continue;}if(m==n) return sum; //sum=0;i--;}}sum=s[0][0];//求对⾓积for(i=1;isum=sum*s[i][i];return sum;}void Matrix::Dis_A(float s[9][9]){for(int i=0;icout<<"|";for(int j=0;jcout<<setw(8)<<s[i][j];cout<<"|"<<endl;}cout<<endl;}Matrix::Matrix(){n=9;for(int i=0;i<9;i )for(int j=0;j<9;j )A[i][j]=Astar[i][j]=IOA[i][j]=0;}void Matrix::Input(){cout<<"\t\t矩阵>>>>>>>>>>>逆矩阵"<<endl<<endl; cout<<"⽅阵A的⾏列数n:";while(1){cin>>n;if(n>1&&n<10) break;else cout<<"n值错误,重新输⼊:";}cout<<"矩阵各值:"<<endl;for(int i=0;ifor(int j=0;jcin>>A[i][j];}void Matrix::Cheak_IsSolvable(){while(1){if(Det_A=CalDet_A()) break;else{cout<<"此矩阵的⾏列式为0,⽆解"<<endl;Input();}}}float Matrix::CalDet_A(){float temp[9][9]={0};for(int i=0;i //临时赋值for(int j=0;jtemp[i][j]=A[i][j];float s=Cal_Det(temp,n);cout<<"|A|="<<s<<endl<<endl;return s;}void Matrix::Inverse_of_A(){for(int i=0;ifor(int j=0;jIOA[i][j]=Astar[i][j]/Det_A;}void Matrix::Display(int t){switch (t){case 1: cout<<"---A :"<<endl;Dis_A(A);break; case 2: cout<<"---A*:"<<endl;Dis_A(Astar);break;case 3: cout<<"---inverse of A:"<<endl;Dis_A(IOA);break;}}。
二阶矩阵求逆矩阵的简便方法求一个二阶矩阵的逆矩阵的方法较为简便,可以通过计算矩阵的伴随矩阵来得到。
伴随矩阵是一个与原矩阵维度相同,对角线元素互换,非对角线元素取负的矩阵。
设有一个二阶矩阵A,可以表示为:A = [[a, b],[c, d]]首先,计算矩阵A的行列式值D,公式为D = ad - bc。
根据行列式的值,可以判断该矩阵是否可逆,若D不等于0,则矩阵可逆;若D等于0,则矩阵不可逆。
接下来,计算伴随矩阵Adj(A),公式为:Adj(A) = [[d, -b],[-c, a]]最后,计算逆矩阵A^-1,公式为:A^-1 = (1/D) * Adj(A)即A^-1 = (1/D) * [[d, -b],[-c, a]]这样,就求得了二阶矩阵的逆矩阵。
下面是一个例子来说明具体的计算过程:假设有一个二阶矩阵A:A = [[1, 2],[3, 4]]首先,计算行列式值D:D = (1*4) - (2*3) = 4 - 6 = -2由于D不等于0,所以矩阵A是可逆的。
接下来,计算伴随矩阵Adj(A):Adj(A) = [[4, -2],[-3, 1]]最后,计算逆矩阵A^-1:A^-1 = (1/-2) * [[4, -2],[-3, 1]]将分数化简:A^-1 = [[-2, 1],[3/2, -1/2]]所以,对于矩阵A = [[1, 2],[3, 4]],其逆矩阵为A^-1 = [[-2, 1],[3/2, -1/2]]。
这种方法适用于任意二阶矩阵的求逆计算,简单易行。
但需要注意的是,在高维矩阵(例如三阶及以上)中,这种方法变得比较复杂,通常需要使用更复杂的方法,如初等变换、高斯消元等来求解逆矩阵。