北京现代朗动原厂电路图 电控稳定程序(ESP)系统
- 格式:pdf
- 大小:551.01 KB
- 文档页数:5
2008北京现代维拉克斯电子车辆稳定程序系统ESP故障诊断手册电路图-ESP(1)电路图-ESP(2)ESP连接器输入/输出连接器端子规定值备注NO 说明31 点火1(+) 过电压范围:17±0.5V工作电压范围9.5±0.5V < V <17±0.5V 低电压范围:7.0±0.5V < V <9.5±0.5V 最大.电流:I <500mA1 POS.蓄电池电源(电磁阀) 最大泄漏电流:I < 0.8mA 工作电压范围9.5±0.5V < V <17±0.5V最大电流:I<40A2 POS.蓄电池电源(电机) 工作电压范围9.5±0.5V<V<16.5±0.5V 冲击电流:I<100A最大电流:I<40A最大泄漏电流:I < 0.2mA46 搭铁额定电流:I <500mA 最大。
电流:I<30A4.5 泵电机搭铁冲击电流:I<100A 最大电流:I<30A16 横摆率与横向G传感器搭铁额定电流:I <150mA30 方向盘转角速度传感器搭铁额定电流:I <100mA17 横摆率传感器电源最大输出电流:I <150mA最大输出电压:V(点火开关)±1V3 转向角传感器电源最大输出电流:I <100mA最大输出电压:V(点火开关)±1V34 制动灯开关输入电压(低):0V ≤ V ≤3.0V输入电压(高电位):7.0V ≤ V ≤16.0V 32 制动开关8 驻车制动开关输入电压(低电位):0V ≤ V ≤3.0V输入电压(高电位):7.0V ≤ V_高电位≤16.0V最大输入电流:I<10mA27 前右轮速传感器输出最大电流:I<16mA 外部电阻:1KΩ< R输出占空比:50±20%18 ESPON/OFF开关输入电压(低):0V ≤ V ≤3.0V输入电压(高电位):7.0V ≤ V ≤16.0V 最大输入电流:I <10mA15 CAN BUS线(低电位)最大电流:I <10A14 CAN BUS线(高电位)4 前左轮速传感器电源输出电压:点火开关(V)±1V输出电流:最大30mA5 前右传感器电源7 后左传感器电源 6 后右轮速传感器电源 9 前左传感器信号输入电流低:5.9~8.4mA输入电流(高):11.8~16.8mA 频率范围:1~2000Hz 输入占空比:50±20%10 前右轮速传感器信号 12 后左轮速传感器信号 11 后右轮速传感器信号24 方向盘转角速度传感器(1) 输入占空比(ST1、ST2):50±10 相位差(ST1、ST2):2±0.6deg 高电压:3.0 V < V <4.1V低电压:1.3V < V <2.0V25 方向盘转角速度传感器(2)26方向盘转角速度传感器(N) 13 诊断输入/输出输入电压 IL(V)<0.3IGN(V) IH(V)>0.7 IGN(V) 输出电压 OL(V)<0.2IGN(V) OH(V)>0.8 IGN(V)44 G 传感器搭铁(仅4WD)- 额定电流:I <10mA 21G 传感器电源(仅4WD)- 最大输出电流:I <10mA - 最大输出电压:4.75V ≤ V ≤5.25V23G 传感器信号(仅4WD)- 输入电压:0V ≤ V ≤5.0V - 归零偏置电压:2.5±0.1V部件和部件位置一般说明ABS ECU(电子控制装置)检查蓄电池电压和交流发电机输出电压来判定ABS系统操作是否正常。

电子稳定程序ESP系统的组成和工作原理摘要ESP的英文全称为“Electronic Stability Program”,也就是电子稳定程序。
ESP则可以通过主动调控发动机的转速,并调整每个轮子的驱动力和制动力,来修正汽车的过度转向和转向不足。
实际上ESP系统也是一种牵引力控制系统,但是及其它牵引力控制系统比较,ESP不但控制驱动轮,而且可控制从动轮。
如后轮驱动汽车出现转向过度时,ESP便会慢刹外侧的前轮来稳定车子,防止后轮失控而发生甩尾现象;在转向过小时,为了校正行驶循迹方向,ESP则会慢刹内侧后轮,从而校正行驶方向。
ESP是一个主动安全系统,通过有选择性的分缸制动及发动机管理系统干预,防止车辆滑移。
ESP判定为出现转向不足将制动内侧后轮,从而稳定车辆。
保证驾驶者的安全。
本文介绍了汽车电子稳定系统 ESP的工作原理、组成部件、功能及其维修方法。
关键词:电子稳定程序,牵引力控制系统,转向过度,转向不足,安全AbstractESP in English called "Electronic Stability Program", which is the Electronic Stability Program. ESP can be regulated by the active engine speed, and adjust the driving force and braking force of each wheel to correct vehicle steering and over-steering.In fact, the ESP system is also a traction control system, but compared with other traction control system, ESP not only control wheels, and can control the driven wheel. Such as when a rear wheel drive car oversteer, ESP will slowly brake the outside front wheel to stabilize the car, the rear wheels to prevent the uncontrolled drift phenomenon occurs; in turning over an hour, in order to correct with tracking direction, ESP will slowly brake the inside rear wheel, thereby correcting the direction of travel. ESP is an active safety system, through selective brake cylinder of the engine management system to intervene and prevent the vehicle slip. ESP understeer is determined inside rear wheel brake to stabilize the vehicle. Ensure the safety of motorists. This article describes the automotive electronic stability system ESP works, components, functions and composition of maintenance methods.Key words:Electronic stability program, traction control system, oversteer, understeer, security目录摘要 (1)Abstract (2)第1章ESP系统的结构及组成 (5)1.1电子控制单元(ECU) (7)1.2 液压调节器总成 (9)1.3 前轮速度传感器.......................... 错误!未定义书签。
浅谈汽车电子稳定程序系统(ESP)(图)随着现代汽车技术的发展,车辆的主动安全性大大提高。
为了防止车轮抱死,避免车辆在紧急制动时因车轮抱死而失控,1978年博世公司开发了世界首套ABS,并在1985年投产。
据统计在2004年欧洲生产的新车ABS,装备率已达到85%,而欧洲生产协会更保证对2004年7月起生产的新车100%装备ABS系统。
在我国生产的新车中装备ABS系统也达到66%。
由于ABS不能解决车辆在湿滑路面上起步或加速出现的车轮打滑问题,更不能避免车辆发生侧滑。
因此,在ABS的基础上,进一步发展出了牵引力控制系统(TCS)。
在车辆起步或加速时,如果某个车轮出现了打滑现象(车轮速度传感器不断监视着每一个车轮),TCS会迅速干预制动系统和发动机工作,使车辆能够安全地起步或加速(防止车轮打滑,保证车辆具有良好的牵引性能,同时照顾其稳定性和操纵性)。
1995年博世公司又推出了电子稳定程序(Electronic Stability Program,简称ESP 系统)。
实际上ESP系统也是一种牵引力控制系统,但是与其它牵引力控制系统比较,ESP 不但控制驱动轮,而且可控制从动轮。
如后轮驱动汽车出现转向过度时,ESP便会慢刹外侧的前轮来稳定车子,防止后轮失控而发生甩尾现象;在转向过小时,为了校正行驶循迹方向,ESP则会慢刹内侧后轮,从而校正行驶方向。
ESP是一个主动安全系统,通过有选择性的分缸制动及发动机管理系统干预,防止车辆滑移。
ESP判定为出现转向不足将制动内侧后轮,从而稳定车辆。
当ESP判定为出现转向过度,ESP将制动外侧前轮,防止出现甩尾,并减弱过度转向趋势,从而稳定车辆。
如果单独制动某个车轮不足以稳定车辆,ESP将通过降低发动机扭矩输出的方式来制动其它车轮来满足需求。
有ESP系统的与只有ABS的汽车相比,它们之间的差别在于ABS只能被动地做出反应,而ESP则能够控测和分析车况,并纠正驾驶错误,预患于未然。



汽车电子稳定系统ESP随着现代汽车技术的不断发展,越来越多的汽车电子系统被引入到汽车生产中。
其中,ESP系统是一种普遍采用的汽车电子系统,它的宗旨就是提高汽车的驾驶稳定性,从而提升驾驶的安全性。
本文将介绍汽车电子稳定系统ESP的工作原理,其作用和优越性。
一、ESP系统的工作原理ESP系统是基于车辆动态平衡和物理学定律建立的,其核心技术是借助车辆传感器来检测车辆状态的变化,如车速、转向角度、横向加速度和车辆倾斜角度等,并将这些数据汇总到中央计算机中进行计算和分析,如果计算结果表明汽车发生了横向偏差或失控的情况,计算机会向相应的驱动系统、制动系统和转向系统发送信息,实时调整汽车的转向、制动和动力输出,以保持车辆稳定性。
二、ESP系统的作用1.提高行驶稳定性:ESP系统可以检测车辆动态平衡,减少横向偏差和车身倾斜,从而防止车辆失控、侧翻和行驶偏离等情况的发生,确保行驶的平稳和安全。
2.提高车辆的抓地力:ESP系统可以通过调整轮胎的摩擦力,增强车辆的牵引力和抓地力,同时有效减少轮胎的磨损和燃油消耗。
3.增加驾驶便利性:ESP系统可以针对不同路况和环境自动调整制动系统、转向系统和动力输出,使驾驶人员更加容易掌握车辆,并可以减少驾驶员的驾驶疲劳程度。
4.提高安全性:ESP系统是一种安全驾驶的重要保障,它可以提升车辆的行驶稳定性、抓地力和灵活性,降低行车事故的风险。
三、ESP系统的优越性1.智能化:ESP系统采用先进的计算机技术和车辆传感器技术,实现车辆状态的实时检测和数据分析,并根据计算结果自动调整车辆的制动、转向和动力输出。
2.适用性广:ESP系统可以适用于多种车型和不同驾驶环境,无论是城市道路还是乡村小路,都可以有效提升车辆的稳定性和安全性。
3.效果显著:ESP系统具有比传统的车辆转向控制和制动系统更加精准和迅速的反应时间,能够更好地控制车辆的横向运动,从而极大地提高了行车的安全性和可靠性。
4.可维护性强:因为ESP系统不涉及到机械的运作部件,所以其可靠性和维护难度相对较小,相比之下,ESP系统的维护成本也要低得多。
车辆电子稳定程序控制系统ESP随着汽车工业的不断发展,安全性成为汽车技术的一个重要研究方向。
车辆电子稳定程序控制系统ESP(Electronic Stability Program)便是其中的重要一环,它可以从多个角度对车辆进行控制和调整,避免发生紧急状况,提升驾驶的安全性和舒适性。
在传统汽车中,汽车的操控主要依靠车辆驾驶员,如果驾驶员疏忽大意或者遇到紧急情况,车辆易发生侧滑、打滑等失控状况。
而ESP则能够根据车辆的动态数据及加速度传感器实时监控车辆运动状况,并通过车辆数据的分析、计算发现异常行为,以保证驾驶员的安全。
ESP的工作原理是检测车辆在行驶过程中的任何不正常状态以及监测车辆发生偏移的情况。
当ESP检测到车辆在行驶过程中出现越线、车身倾斜和打滑等异常情况时,系统会采取多种控制手段进行调整,例如降低发动机动力输出、刹车减速、降低转向力等,有效控制车辆的行驶状态,避免事故的发生。
ESP系统主要包括传感器、控制单元和执行机构三部分。
传感器主要包括横向加速度传感器、转向角度传感器、转向角速度传感器等,它们能够实时获取车辆的动态数据信号。
控制单元能够对传感器的信号进行分析、判断,敏锐发现车辆异常情况。
执行机构包括制动系统、电动方向盘等,并通过自动化控制方式,对车辆进行控制调节。
ESP系统通过实时监测和调整车辆的运行状况,能够大幅提升汽车行驶的安全性和驾驶的舒适性。
例如,当汽车行驶在多弯道路面上,ESP系统能够通过发动机控制、制动系统等多种手段,保证车辆行驶在正确的轨迹上,避免车辆侧滑,提升行驶的稳定性和安全性。
当车辆行驶在雨雪天气环境下,ESP系统能够通过自动调整制动力分配使车轮与地面之间摩擦力始终处于合适的状态,避免车辆打滑,确保行驶安全性。
总之,ESP系统是汽车电子技术中的一个重要组成部分,其在提升车辆操控稳定性、避免驾驶员在行驶过程中出现危险情况等方面作用重要。
随着数字化技术的不断提升和新能源车型的出现,ESP系统也将不断升级,更好地适应各种行驶环境,为驾驶者行车带来更加安全、舒适的体验。
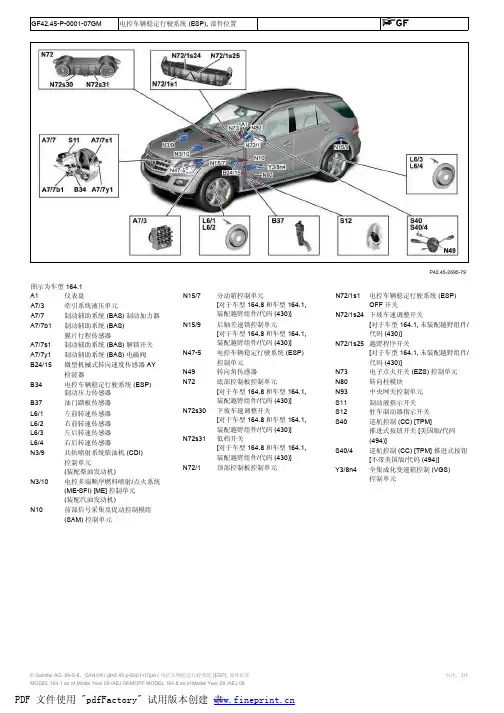
P42.45-2695-79图示为车型 164.1A1仪表盘N15/7分动箱控制单元N72/1s1电控车辆稳定行驶系统 (ESP)[对于车型 164.8 和车型 164.1, OFF 开关A7/3牵引系统液压单元装配越野组件/代码 (430)]N72/1s24下坡车速调整开关A7/7制动辅助系统 (BAS) 制动加力器N15/9后轴差速锁控制单元[对于车型 164.1, 未装配越野组件/ A7/7b1制动辅助系统 (BAS)[对于车型 164.8 和车型 164.1, 代码 (430)]膜片行程传感器装配越野组件/代码 (430)]N72/1s25越野程序开关A7/7s1制动辅助系统 (BAS) 解锁开关N47-5电控车辆稳定行驶系统 (ESP) [对于车型 164.1, 未装配越野组件/ A7/7y1制动辅助系统 (BAS) 电磁阀控制单元代码 (430)] B24/15微型机械式转向速度传感器 AYN49转向角传感器N73电子点火开关 (EZS) 控制单元检波器N72底部控制板控制单元N80转向柱模块B34电控车辆稳定行驶系统 (ESP)[对于车型 164.8 和车型 164.1, N93中央网关控制单元制动压力传感器装配越野组件/代码 (430)]S11制动液指示开关B37油门踏板传感器N72s30下坡车速调整开关S12驻车制动器指示开关L6/1左前转速传感器[对于车型 164.8 和车型 164.1, S40巡航控制 (CC) [TPM] L6/2右前转速传感器装配越野组件/代码 (430)]推进式按钮开关 [美国版/代码L6/3左后转速传感器N72s31低档开关(494)] L6/4右后转速传感器[对于车型 164.8 和车型 164.1, S40/4巡航控制 (CC) [TPM] 推进式按钮N3/9共轨喷射系统柴油机 (CDI)装配越野组件/代码 (430)][不带美国版/代码 (494)]控制单元N72/1顶部控制板控制单元Y3/8n4全集成化变速箱控制 (VGS) (装配柴油发动机)控制单元N3/10电控多端顺序燃料喷射/点火系统(ME-SFI) [ME] 控制单元(装配汽油发动机)N10前部信号采集及促动控制模组(SAM) 控制单元© Daimler AG, 09-5-8,G/04/09 / gf42.45-p-0001-07gm / 电控车辆稳定行驶系统 (ESP), 部件位置页次:1/1 MODEL 164.1 as of Model Year 09 /AEJ 08 MOPF MODEL 164.8 as of Model Year 09 /AEJ 08PDF 文件使用 "pdfFactory" 试用版本创建肀。
汽车ESP工作原理ESP(Electronic Stability Program)是一种现代汽车安全系统,旨在提高车辆的稳定性和操控性能。
它通过传感器和计算机控制单元(ECU)来监测车辆的各种参数,并根据需要采取控制措施,以防止车辆失控或滑出控制。
ESP系统主要由以下几个组成部分组成:1. 传感器:ESP系统使用多个传感器来监测车辆的状态。
其中包括车速传感器、转向角传感器、加速度传感器、侧倾角传感器等。
这些传感器不断地向ECU提供车辆的实时数据。
2. 控制单元(ECU):ECU是ESP系统的核心部分,它接收传感器提供的数据,并根据预设的算法进行计算和分析。
根据车辆的状态和驾驶员的操作,ECU会发出相应的指令来控制车辆的稳定性。
3. 刹车系统:ESP系统通过控制刹车系统来实现车辆的稳定性控制。
当ECU检测到车辆出现悬空、侧滑或失控等情况时,它会通过电子控制阀门调节刹车压力,使车轮的制动力分配更加均衡,以保持车辆的稳定性。
4. 引擎管理系统:ESP系统还可以通过控制引擎的输出来实现车辆的稳定性控制。
当ECU检测到车辆出现侧滑或失控时,它会通过调整引擎的点火时机和油门开度等参数,来减少车轮的滑动,提高车辆的稳定性。
ESP系统的工作原理可以简单概括为以下几个步骤:1. 数据采集:ESP系统通过传感器实时采集车辆的各项数据,包括车速、转向角、加速度、侧倾角等。
2. 数据分析:ECU接收传感器提供的数据,并根据预设的算法进行计算和分析。
它会比较车辆的实际状态与预期状态之间的差异,以判断车辆是否处于失控或不稳定的状态。
3. 控制指令:根据数据分析的结果,ECU会发出相应的控制指令,以调节刹车系统和引擎管理系统。
这些指令旨在恢复车辆的稳定性,防止车辆失控或滑出控制。
4. 控制执行:刹车系统和引擎管理系统根据ECU的控制指令执行相应的操作。
刹车系统通过调节刹车压力来实现车轮的制动力分配,而引擎管理系统通过调整引擎输出来减少车轮的滑动。
北京现代朗动轿车电路图作者:李俊
来源:《汽车与驾驶维修》2013年第01期
北京现代朗动轿车已于2012年8月正式上市,作为北京现代针对中级车市场推出的一款颠覆性新锐产品,朗动在外形上继续沿用了现代车系最近惯用的“流体雕塑”设计理念。
在动力总成方面,朗动所搭载内部代号为G4NB 的1.8L Nu 发动机和A6GF16挡手自一体变速器更是首次在北京现代的车型中出现。
另外,在车辆配置方面,朗动依据消费者的不同需求,也装配了非常丰富的配置。
为了方便广大维修人员对北京现代朗动轿车的维修,在此对其部分电路图进行了整理。
(1)1.8L Nu 发动机控制系统电路图(图1)
(2)A6GF16挡手自一体变速器控制系统电路图(图2)(3)车身控制系统电路图(图3)。