利用机构组成原理进行机械创新设计的基本思路
- 格式:docx
- 大小:26.93 KB
- 文档页数:1

机械原理教案平面机构的组成原理分析 1.平面机构的组成原理任何机构中都包含原动件、机架和从动件系统三部分。
由于机架的自由度为零,每个原动件的自由度为1,而机构的自由度等于原动件数,所以,从动件系统的自由度必然为零。
杆组:自由度为零的从动件系统。
基本杆组:不可再分的自由度为零的构件组合称为基本杆组,简称基本组。
杆组的结构式为:l p n 23机构的组成原理:把若干个自由度为零的基本杆组依次联接到原动件和机架上,就可组成新的机构,其自由度数目与原动件的数目相等。
在进行新机械方案设计时,可以按设计要求根据机构的组成原理,创新设计新机构。
在设计中必须遵循的原则:在满足相同工作要求的前提下,机构的结构越简单、杆组的级别越低、构件数和运动副的数目越少越好。
2.平面机构的结构分析对已有机构或已设计完的机构进行运动分析和力分析时,首先需要对机构进行结构分析,即将机构分解为基本杆组、原动件和机架,结构分析的过程与由杆组依次组成机构的过程正好相反。
通常称此过程为拆杆组。
拆杆组时应遵循的原则:从传动关系离原动件最远的部分开始试拆;每拆除一个杆组后,机构的剩余部分仍应是一个完整的机构;试拆时,按二级组试拆,若无法拆除,再试拆高一级别的杆组。
3.平面机构的高副低代法目的:为了使平面低副机构结构分析和运动分析的方法适用于含有高副的平面机构。
概念:用低副代替高副方法:用含两个低副的虚拟构件代替高副 高副低代必须满足的条件: 1.替代前后机构自由度不变 2.替代瞬时速度加速度不变对于一般的高副机构,在不同位置有不同的瞬时替代机构。
经高副低代后的平面机构,可视为平面低副机构。
第三章平面机构的运动分析和力分析基本要求:1.掌握速度瞬心的概念,平面机构速度瞬心的数目及确定方法,学会用速度瞬心法对现有机构进行速度分析;2.掌握用相对运动图解法对机构进行速度分析的方法;3.掌握机构运动分析的复数矢量法,了解矩陈法;4.掌握平面机构力分析中的动态静力分析法,能够对给出机构用解析法建模并进行机构运动分析和力分析。
第十三章机械创新设计简介第一节概述第二节常用的创造性思维模式和方法第三节机械的创新设计第四节产品造型创新设计简介第一节概述一、创新设计的概念机械创新设计MCD(Mechanical Creative De sign)是指更充分地发挥设计者的创造力和智慧,利用人类已有的相关科学理论、方法和原理,以及最新科技成果,在现代设计理论和方法的指导下,进行新的构思、设计出新颖、有创造性及实用性的机构或机械产品(装置)的一种实践活动。
开发设计创新设计变异设计反求设计开发设计:从提出方案到完成设计全过程都是全新的、探索性的,创造设计出新机器、新产品,以满足新的生产和生活的需要。
变异设计:在已有产品的基础上,针对原有产品存在的缺或新的功能要求,从工作原理、机构、结构、参数、尺寸等方面进行一定的变异,改进机械产品的技术性能、可靠性、经济性和适用性,设计出新产品以适应市场需求。
反求设计:针对已有的先进产品或设计,进行深入分析研究,探索掌握其关键技术,在消化、吸收的基础上,开发出同类型的创新产品。
无论哪种创新设计都要求设计师在设计环节上突破常规惯例,追求与前人、众人不同的的方案,提出新原理、新方法、新机构、新形式、新材料等,在求异是寻求创新,将设计者的智慧具体物化在整个设计过程中。
二、机械创新设计与常规机械设计以及创造发明的关系1.机械创新设计与常规机械设计常规机械设计过程一般可以分为这样4个阶段:(1)机械总体方案设计设计者根据设计任务书的要求,广泛收集同类机械或相近机械的性能参数,使用情况、优缺点等技术资料和数据,而后进入机械总体方案设计阶段。
机械总体方案设计在很大程度上决定了未来机械的面貌,对机械的性能、成本影响很大。
(2)机械的运动设计机械运动设计的内容包括:机构主要尺寸的确定、机械运动参数的分析、传动比的确定与分配等。
(3)机械的动力设计在运动设计的基础上,确定作用在机械系统各构件上的载荷并进行机械的功率和能量计算。
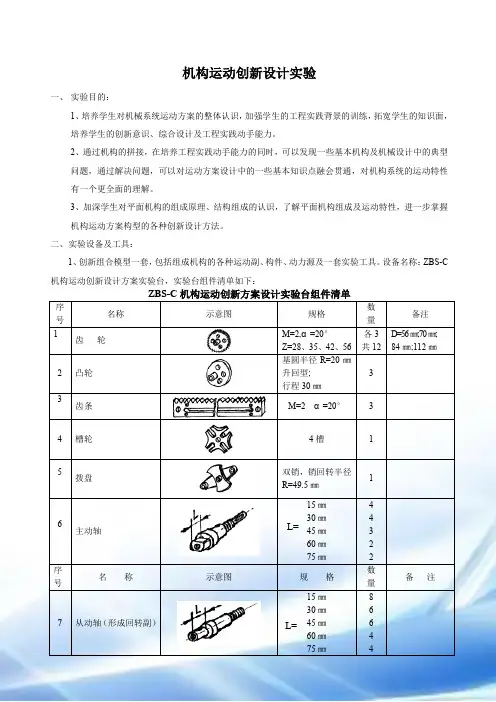
机构运动创新设计实验一、 实验目的:1、培养学生对机械系统运动方案的整体认识,加强学生的工程实践背景的训练,拓宽学生的知识面,培养学生的创新意识、综合设计及工程实践动手能力。
2、通过机构的拼接,在培养工程实践动手能力的同时,可以发现一些基本机构及机械设计中的典型问题,通过解决问题,可以对运动方案设计中的一些基本知识点融会贯通,对机构系统的运动特性有一个更全面的理解。
3、加深学生对平面机构的组成原理、结构组成的认识,了解平面机构组成及运动特性,进一步掌握机构运动方案构型的各种创新设计方法。
二、实验设备及工具:1、创新组合模型一套,包括组成机构的各种运动副、构件、动力源及一套实验工具。
设备名称:ZBS-C 机构运动创新设计方案实验台,实验台组件清单如下:序号 名称示意图规格数 量备注1 齿 轮M=2,α=20° Z=28、35、42、56 各3共12 D=56㎜;70㎜; 84㎜;112㎜ 2 凸轮基圆半径R=20㎜升回型; 行程30㎜ 33 齿条M=2 α=20°34槽轮4槽15拨盘双销,销回转半径R=49.5㎜ 1 6主动轴15㎜ 30㎜ 45㎜60㎜ 75㎜ 4 4 3 2 2序号名 称 示意图 规 格 数 量 备 注7 从动轴(形成回转副)15㎜ 30㎜ 45㎜60㎜ 75㎜8 6 6 4 4L= L=8 从动轴(形成移动副)15㎜ 30㎜ 45㎜60㎜ 75㎜8 6 6 4 49转动副轴(或滑块)L=5㎜3210复合铰链Ⅰ(或滑块)L=20㎜811复合铰链Ⅱ(或滑块)L=20㎜812 主动滑块插件40㎜55㎜1113 主动滑块座114 活动铰链座Ⅰ螺孔M816可在杆件任意位置形成转-移副15活动铰链座Ⅱ螺孔M516可在杆件任意位置形成移动副或转动副 16 滑块导向杆(或连杆)L=330㎜417 连杆Ⅰ100㎜ 110㎜ 150㎜160㎜ 240㎜ 300㎜ 12 12 8 8 8 8 序号名 称 示意图 规 格数 量备 注 18 连杆ⅡL 1=22㎜ L 2=138㎜819 压紧螺栓M564L= L= L=20 带垫片螺栓M54821 层面限位套4㎜ 7㎜ 10㎜ 15㎜30㎜ 45㎜ 60㎜ 6 6 20 40 20 20 1022紧固垫片(限制轴回转)厚2㎜孔¢16,外径¢222023 高副锁紧弹簧324 齿条护板625 T 型螺母20用于电机座和行程开关座的固定 26 行程开关碰块127 皮带轮628 张紧轮329 张紧轮支承杆330 张紧轮销轴3序号名 称 示意图规 格数 量备 注31 螺栓ⅠM10×15632 螺栓ⅡM10×206L=33 螺栓ⅢM8×15 1634 直线电机10㎜/s 1 带电机座及安装螺栓/螺母35 旋转电机10r/min 3 带电机座及安装螺栓/螺母36 实验台机架机架内可移动立柱5根,每根立柱上可移动滑块3块。
机械设计学习题及(附答案)⼀、名词解释:1、功能原理设计:针对产品的主要功能所进⾏的原理性设计2、简单动作功能:仅完成简单的⼀次性动作的功能3、复杂动作功能:能实现连续的传动的动作功能4、机械创新设计:在功能结构图中,有的分功能⽐较复杂,不可能⽤⼀个已知的机构来完成。
这就需要根据分功能的特点,挑选⼏个机构组成⼀个机械运动系统,由这些机构共同完成这个分功能的机械动作。
5、机械协调性设计:当功能结构图中的各机械分功能均已根据分功能的要求选择好相应的机构后,怎样使这些分散的机构组成⼀个协调运动的整体,只是这个系统⽐较⼤,其综合后完成的机械功能,就是整个机械产品的总功能中的全部机械功能。
6、核⼼技术:产品实现总功能和主要技术要求的技术。
7、关键技术:实现某种功能过程中需要解决的技术难题。
8、弹性强化:使构件在受⼯作载荷之前预受⼀个与⼯作载荷相反的载荷,产⽣⼀个相应的预变形,以及⼀个与⼯作应⼒相反的预应⼒,⼯作时该预加载荷部分抵消⼯作载荷,预变形部分抵消⼯作变形,从⽽降低了构件的最⼤应⼒。
9、塑性强化:使构件在⼯作状态下应⼒最⼤那部分材料预先经塑性变形⽽产⽣⼀个与⼯作应⼒符号相反的残留应⼒,⽤以部分抵消⼯件应⼒。
⼆、简答题:1-1机械产品设计的三个基本环节是什么?答:机械产品设计的三个基本环节是:“功能原理设计,实⽤化设计和商品化设计”1-2、机械设计具有哪些主要特点:答:机械设计具有如下主要特点 :(1)多解性 (2)系统性 (3)创新性1-3、近代“机械设计学”的核⼼内容1)“功能”思想的提出:l947年、美国⼯程师麦尔斯创⽴了“价值⼯程“。
他真正重要的贡献在于他提出的关于‘功能”的思想。
2)“⼈机⼯程’’学科的兴起:“宜⼈”的宗旨已经成为现代机械设计的基本观念。
3)“⼯业设计”学科的成熟。
⼯业产品设计的原则是:“技术第⼀,艺术第⼆”。
⼯业设计师应该⾸先是⼀个⼯业技术专家,⽽不⾸先是⼀个艺术家。
1-4、从设计构思的⾓度机械产品设计可归纳为三⼤步:创意、构思和实现。
![机械自锁机构创新设计完整[精编文档]](https://uimg.taocdn.com/30b715a30975f46527d3e177.webp)
福州大学至诚学院科研实践报告题目:机械自锁机构的设计姓名:学号:年级:学院:专业:指导教师:成绩:2011 年12 月14 日摘要自锁现象是力学中的特殊现象,在生活和工业生产当中应用广泛。
了解自锁现象产生的机理和生活中常见自锁现象的实质,对与我们学习进步有很大的帮助。
自锁现象是可以利用自锁原理可以设计一些机巧的机械,但是有利有弊:破坏了自锁条件即可解除不需要的自锁,而且可以利用自锁原理设计的机械能够解决很多实际问题。
通过对力学自锁现象的研究和应用分析,我们可以深入的了解力学中的自锁现象,为自锁现象更为广泛的应用于实际打下理论基础。
关键词:自锁现象;自锁条件;自锁应用引言自锁力学是物理学的一个分支。
自锁是如果作用于物体的主动力的合力Q 的作用线在摩擦角之内,则无论这个力怎样大,总有一个全反力R与之平衡,物体保持静止;反之,如果主动力的合力Q的作用线在磨擦角之外,则无论这个力多么小,物体也不可能保持平衡。
这种与力大小无关而与摩擦角有关的平衡条件称为自锁条件。
物体在这种条件下的平衡现象称之自锁现象。
在如今的生活中,已有很多领域用到自锁机构,并且加以改进做出更适合的。
像可以再零度以下使用的自行车自锁脚踏板、自锁螺母等。
甚至在电气领域里也用到自锁现象的应用。
经过一个学期的学习实践,我对Pro/E的建模、装配以及运动仿真等模块有了一定程度的了解,同时对自锁现象原理有一定的了解,所以设计了一个自锁机构可用于电钻等各种有进给系统回路中,防止不小心碰触开关而存在的隐患。
但还是存在很多不足,在外观上,造型过于粗糙和不完美,机构过于简单,功能还有些欠缺。
这都是需要进一步的改进。
一、自锁机构科技立项与研究的目的、意义机械自锁的意义自锁现象在机械工程中具有十分重要的意义,主要有如下两方面:1)当设计机械时,为能实现预期的运动,必须避免该机械在所需的运动方向发生自锁;2)有些机械的工作原理就是利用了自锁的特性。
自锁机构在生活中的运用:1.螺母自锁:螺母上部有两个狭槽,当螺母在螺栓上拧紧时,螺栓的螺纹将旋入螺母横断面的狭槽中,螺纹被螺母侧壁渐渐锁紧就达到了制锁的功能。
机械创新套件介绍标准版1002工程创新实验室设备机器时代(北京)科技有限公司目录一、“探索者”机械创新套件特点 (3)二、“探索者”机械创新套件模块说明 (4)2.1 产品构造 (4)2.2、结构件 (5)2.3、控制器 (5)2.4、示教编程 (6)2.5、舵机 (6)2.6、传感器 (6)2.7、开发环境 (7)2.8、附件 (8)2.9、配套资源 (8)三、配套实验课程示例 (9)四、产品配置 (11)五、公司介绍 (12)一、“探索者”机械创新套件特点“探索者”机械创新套件结合了机械、电子、传感器、计算机软硬件、控制、人工智能和造型技术等众多的先进技术。
精心设计的金属结构件能完成几乎所有的机械结构搭建,实现几乎全部的传动方式,配合以高性能的ARM7 LPC2138 32位控制器,8种常用传感器,多个伺服电机,方便验证机器人机构的运动特性,并可以完成大纲规定的大多数数字/模拟电路、单片机、检测技术等方面的实验,贴近日常教学。
C语言、流程图、便携式三种编程方式,方便不同程度,不同需求的用户选择使用。
独创的便携编程方式,让用户可以在不便使用电脑的环境,或仅需要简易编程的情况下顺利完成对机器人的程序设定。
多学科穿插融合,鼓励动手,鼓励创新的教学思路,将为学生提供一个前所未有的动手操作平台,通过对机器人机构的不断地设计、组装、调试、拆卸,给予学生广阔的发挥余地,激发学生的学习热情和创新意识,沿着“学习——实践——总结——创新”的道路不断发展。
使学生能够广泛适用于机械、机电一体化、电气工程、自动化工程等方向的就业需求。
而巧妙的机械结构和高性能、多种类电子部件、软件平台的结合,可设计出独创的智能机器人,完成具有深层开发性质的研究课题,并为教师和学生提供良好的软硬件平台。
二、“探索者”机械创新套件标准版1002模块说明2.1 产品构造包装第一层:电子模块&组装工具第二层:结构零件2.2、结构件27种2.4mm板厚金属结构件、5种塑料结构件,全部按照国际零件标准设计,总数254个,其他结构零配件1158个。
机械设计之基于机构组成原理的拼接设计机械设计是现代工程设计领域中相当重要的一个学科分支。
在机械设计中,机构组成原理的拼接设计是一种十分实用的方法。
通过对各种机构的基本组成原理进行归纳总结,设计师能够更好地选择合适的机构构成方案来满足不同的设计需求。
一、什么是机构组成原理的拼接设计?机械工程中的机构是由不同元素构成的。
机构组成原理的拼接设计指的是根据机械基元、机构元素和机构连接方式等基本方面来设计机构体系。
这种设计方式可以通过准确的计算机构的相对运动来实现实际应用场景中的机械机构。
机构元素是机构拼接设计的基础,它是机构的基本组成单元。
机构元素可以是动力学或静力学的元素。
机构元素的种类非常繁多,包括传动装置、滑轮、轮齿、销轴、插销、斜铁、手柄等。
机构元素的选用应根据所设计机构的功用、运动要求以及运动状态等情况来确定。
机械基元则是机构元素的进一步组合。
机械基元包括连杆、曲柄、齿轮、衔铁组、凸轮和曲轴等等。
机械基元的特点是其能够按照一定规律生成机构,如果一定程度上改动其中的某一零件,就可以形成新的机构。
机构连接方式是机构组成原理中的另一个重要方面。
在机械设计中,机构连接方式非常重要,因为它们直接影响到机构的性能和可靠性。
机构连接方式包括直接连接、球接、铰接、齿口连接等等。
二、机构组成原理的拼接设计在机械工程中的实际应用机械工程中的机构设计包括设计理论、设计方法和设计工具等方面。
机械工程的设计师需要根据机构的设计目的和特定的工作要求来选择合适的机构构造方案。
机构组成原理的拼接设计是现代机械设计黄金标准之一。
该方法的实际应用未来也有望进一步推广。
因为机械工程中需要处理的具体机构种类也非常丰富,因此设计师需要准确而灵活地选择机构,使其能够更好地满足设计目的。
如机械传动中常常需要选择合适的车轮机构,其动力学行为和稳定性状况对于机械传动效率起到至关重要的作用。
其他一些机构也包括一些特殊的机构,例如斜盘机构、双曲线机构、螺旋机构、滚珠丝杠机构以及针轮机构等等。
利用机构组成原理进行机械创新设计的基本思路
利用机构组成原理进行机械创新设计的基本思路主要包含以下几个步骤:
首先,任何平面机构都可以看作是由若干个基本杆组依次联接于原动件和机架上而成,这就是机构的组成原理。
理解这一原理对于进行机构的创新设计具有十分重要的指导意义。
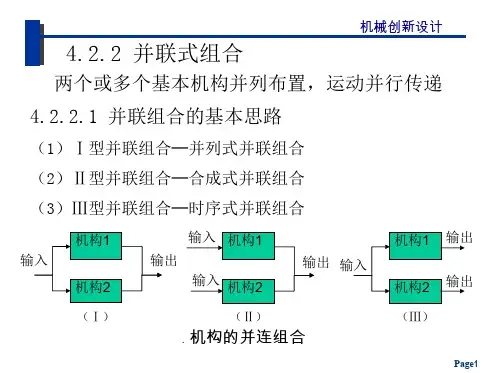
其次,我们可以利用机构的组成原理来不断连接各类杆组,按照串联、并联、叠加和封闭的规则组合基本机构。
例如,可以通过把基本杆组依次连接到原动件和机架上,从而组成新机构。
最后,这些方法的混合连接,可以进一步得到更为复杂的机构系统。
充分发挥设计者的创造力,利用人类已有的相关科学技术成果(如理论、方法、技术、原理等),进行创新构思,设计出具有新颖性、创造性及实用性的机构或机械产品(装置)。
总的来说,利用机构组成原理进行机械创新设计的过程需要深入理解机构的组成原理,灵活运用各种组合规则,以及发挥设计者的创造力。