绕线式异步电动机的转子接线图
- 格式:docx
- 大小:493.02 KB
- 文档页数:4
三相绕线式异步电动机的启动控制绕线式异步电动机R与鼠笼式异步电动机的主要区别是绕线式异步电动机的转子采用三相对称绕组,启动时通常采用转子串电阻启动,或者是采用频敏变阻器启动。
一、绕线式异步电动机转子串电阻启动1.方法启动时,在绕线式异步电动机的转子回路中串入合适的三相对称电阻,如果正确选取电阻器的电阻值,使转子回路的总电阻值R2=X20,由前面分析可知,此时S m=1,即最大转矩产生在电动机启动瞬间,从而缩短起动时间,达到减小启动电流增大启动转矩的目的。
随着电动机转速的升高,可变电阻逐级减小。
启动完毕后,可变电阻减小到零,转子绕组被直接短接,电动机便在额定状态下运行。
这种启动方法的优点是不仅能够减少启动电流,而且能使启动转矩保持较大范围,故在需要重载启动的设备如桥式起重机、卷扬机、龙门吊车等场合被广泛采用。
其缺点是所需的启动设备较多,一部分能量消耗在启动电阻,而且启动级数较少。
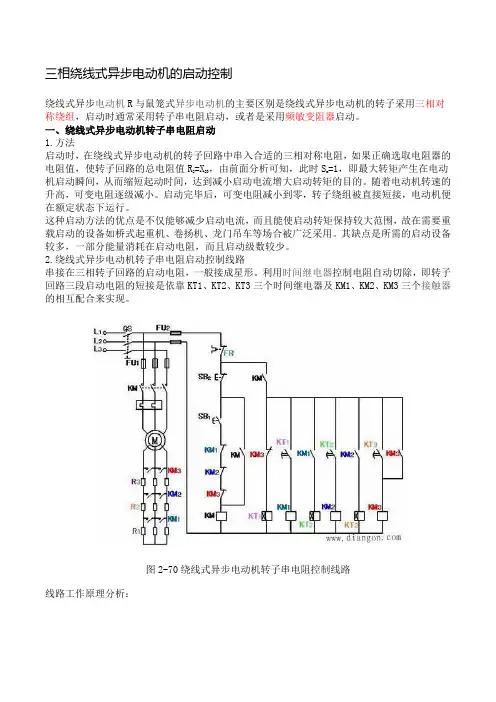
2.绕线式异步电动机转子串电阻启动控制线路串接在三相转子回路的启动电阻,一般接成星形。
利用时间继电器控制电阻自动切除,即转子回路三段启动电阻的短接是依靠KT1、KT2、KT3三个时间继电器及KM1、KM2、KM3三个接触器的相互配合来实现。
图2-70绕线式异步电动机转子串电阻控制线路线路工作原理分析:与启动按钮SBl串接的接触器KMl、KM2、和KM3常闭辅助触头的作用是保证电动机在转子绕组中接入全部外加电阻的条件下才能启动。
如果接触器KMl、KM2、和KM3中任何—个触头因熔焊或机械故障而没有释放时,启动电阻就没有被全部接入转子绕组中,从而使启动电流超过规定的值。
把KMl、KM2和KM3的常闭触头与SBl串接在一起,就可避免这种现象的发生,因三个接触器中只要有一个触头没有恢复闭合,电动机就不可能接通电源直接启动。
停止时按下SB2即可。
二、转子回路串接频敏变阻器启动控制绕线式异步电动机转子绕组串接电阻的启动方法:若想获得良好的启动特性,一般需要较多的启动级数,所用电器多,控制线路复杂,设备投资大,维修不便,同时由于逐级切除电阻,会产生一定的机械冲击力。

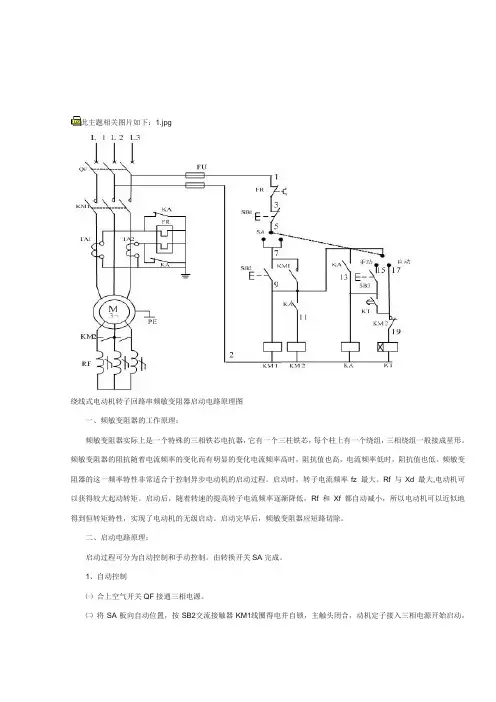
此主题相关图片如下:1.jpg绕线式电动机转子回路串频敏变阻器启动电路原理图一、频敏变阻器的工作原理:频敏变阻器实际上是一个特殊的三相铁芯电抗器,它有一个三柱铁芯,每个柱上有一个绕组,三相绕组一般接成星形。
频敏变阻器的阻抗随着电流频率的变化而有明显的变化电流频率高时,阻抗值也高,电流频率低时,阻抗值也低。
频敏变阻器的这一频率特性非常适合于控制异步电动机的启动过程。
启动时,转子电流频率fz 最大。
Rf 与Xd 最大,电动机可以获得较大起动转矩。
启动后,随着转速的提高转子电流频率逐渐降低,Rf 和Xf 都自动减小,所以电动机可以近似地得到恒转矩特性,实现了电动机的无级启动。
启动完毕后,频敏变阻器应短路切除。
二、启动电路原理:启动过程可分为自动控制和手动控制。
由转换开关SA完成。
1、自动控制㈠合上空气开关QF接通三相电源。
㈡将SA板向自动位置,按SB2交流接触器KM1线圈得电并自锁,主触头闭合,动机定子接入三相电源开始启动。
(此时频敏变阻器串入转子回路)。
㈢此时时间继电器KT也通电并开始计时,达到整定时间后KT的延时闭合的常开接点闭合,接通了中间继电器KA 线圈回路,KA其常开接点闭合,使接触器KM2 线圈回路得电,KM2的常开触点闭合,将频敏变阻器短路切除,启动过程结束。
㈣线路过载保护的热继电器接在电流互感器二次侧,这是因为电动机容量大。
为了提高热继电器的灵敏的度和可靠性,故接入电流互感器的二次侧。
㈤另外在启动期间,中间继电器KA的常闭接点将继电器的热元件短接,是为了防止启动电流大引起热元件误动作。
在进入运行期间KA常闭触点断开,热元件接入电流互感器二次回路进行过载保护,2、手动控制㈠合上空气开关QF接通三相电源㈡将SA搬至手动位置㈢按下启动按钮SB2, 接触器KM1线圈得电,吸合并自锁,主触头闭合电动机带频敏变阻器启动。
㈣待转速接近额定转速或观察电流表接近额定电流时,按下按钮SB3中间继电器KA线圈得电吸合并自锁,KA的常开触点闭合接通KM2线圈回路,KM2的常开触点闭合将频敏变阻器短路切除。
三相绕线式异步电动机各种运行状态下的机械特性原理简述机械特性是指其转速与转矩间的关系,一般表示为。
由于三相异步电动机的机械特性呈非线性关系,所以函数表达式以转速为自变量,转矩为因变量,写为更为方便。
又因转差率s也可以用来表征转速,而且用s表示的机械特性表达式更为简洁,所以对三相异步电动机一般用来表示机械特性,同时将作为横坐标,这样和原的图形是一致的。
一、三相异步电动机机械特性的表达式三相异步电动机机械特性的表达式一般有三种:1.物理表达式其中为异步电机的转矩常数;为每极磁通;为转子电流的折算值;为转子回路的功率因数。
2.参数表达式其中。
3.实用表达式其中为最大转矩,为发生最大转矩时的转差率。
三种表达式其应用场合各有不同,一般物理表达式适用于定性分析与及间的关系,参数表达式可以分析各参数变化对电动机运行性能的影响,而实用表达式最适合用于进行机械特性的工程计算。
二、三相异步电动机的机械特性1.固有机械特性固有机械特性是指异步电动机在额定电压、额定频率下,电动机按规定方法接线,定子及转子回路中不外接电阻(电抗或电容)时所获得的机械特性,如图15-1所示。
图15-1 三相异步电动机的固有机械特性下面对机械特性上反映其特点的几个特殊点进行分析:(1)起动点:其特点是:,,起动电流;(2)额定运行点:其特点是:,,;(3)同步速点:其特点是:,,,,点是电动状态与回馈制动的转折点;(4)最大转矩点:电动状态最大转矩点,其特点是:,;回馈制动最大转矩点,其特点是:,;由公式可以看出,。
2.人为机械特性由三相异步电动机机械特性的参数表达式可见,异步电动机的电磁转矩在某一转速下的数值,是由电源电压、频率、极对数及定转子电路的电阻、电抗、、、决定的。
因此人为的改变这些参数,就可得到不同的人为机械特性。
现介绍改变某些参数时人为机械特性的变化:(1)降低电压不变,不变,因为,,,所以降低电压时,、、均减小,其人为机械特性见图15-2。
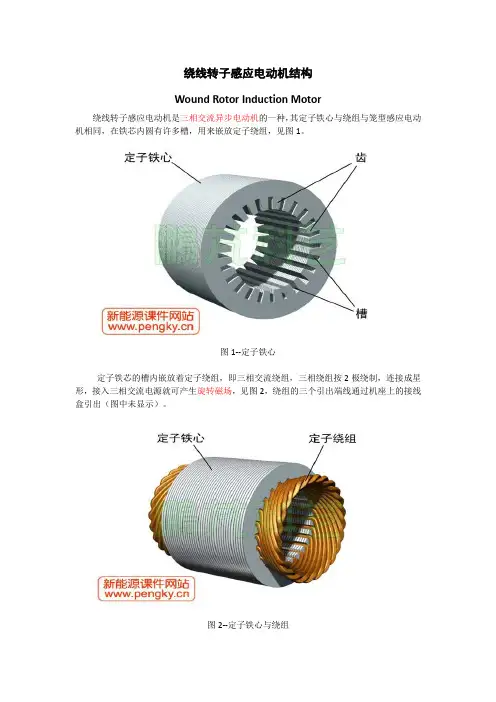
绕线转子感应电动机结构Wound Rotor Induction Motor绕线转子感应电动机是三相交流异步电动机的一种,其定子铁心与绕组与笼型感应电动机相同,在铁芯内圆有许多槽,用来嵌放定子绕组,见图1。
图1--定子铁心定子铁芯的槽内嵌放着定子绕组,即三相交流绕组,三相绕组按2极绕制,连接成星形,接入三相交流电源就可产生旋转磁场,见图2,绕组的三个引出端线通过机座上的接线盒引出(图中未显示)。
图2--定子铁心与绕组绕线转子感应电动机的转子铁芯也由硅钢片叠成,在铁芯外圆有许多槽,用来嵌放转子绕组,见图3。
图3--绕线转子铁心转子铁芯的槽内嵌放着转子绕组,也是2极的三相交流绕组,连接成星形,接入三相交流电源也可产生旋转磁场,见图4。
不管定子与转子的槽数各为多少,定子绕组与转子绕组的极数必须相同,例如同为2极、4极、6极等。
图4--转子铁心与绕组转子绕组线端通过集电环与电刷引出,下面通过一套较简单的电刷与集电环装置介绍其基本结构。
电刷由润滑性与导电性好的石墨质材料压制而成,电刷装在刷握内,刷握上有压紧电刷的弹簧压片;刷握安装在刷杆上,刷杆是绝缘的,刷杆上安装3套独立的刷握,位置对应3个集电环,每套刷握有2个电刷,共有6个电刷。
图5中左图是该电刷装置的轴向视图,中图是该电刷装置的径向视图,右图是该电刷装置的立体图。
图5--电刷结构图集电环较多采用黄铜或锰钢等导电良好、润滑耐磨的材料制成,3个独立的集电环紧固在绝缘套筒上,保证环与环,环与转轴之间都是互相绝缘的。
每个集电环通过一根导电杆引出作为接线端,导电杆穿过其他集电环时由绝缘套管隔开,3个导电杆分别连接3个集电环,相互绝缘。
图6左图是剖开的集电环,表示导电杆与集电环的连接或绝缘,A导电杆直接连接集电环1,B导电杆穿过集电环1连接集电环2,C导电杆穿过集电环1与2连接集电环3。
图6中图是完整的集电环;图6右图是集电环与电刷的组合图,电刷被弹簧压片压向集电环,保证电刷与集电环的良好接触。
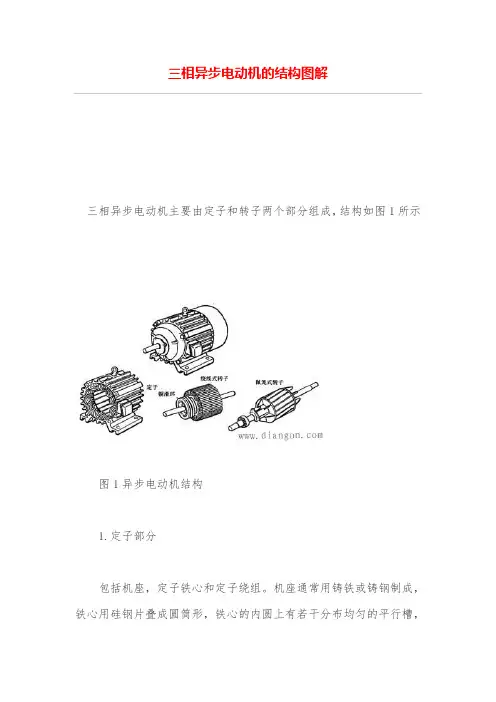
三相异步电动机的结构图解三相异步电动机主要由定子和转子两个部分组成,结构如图1所示图1异步电动机结构1.定子部分包括机座,定子铁心和定子绕组。
机座通常用铸铁或铸钢制成,铁心用硅钢片叠成圆筒形,铁心的内圆上有若干分布均匀的平行槽,槽内安装定子绕组。
定子绕组是电动机的电路部分,三相电动机的定子绕组由三相对称的绕组组成。
三相绕组的各相绕组彼此独立,按互差1200电角度嵌放在定子,各绕组起绐端分别为U1、U2、V1、V2、W1、W2,从机座上的接线盒中引出。
根据要求将三相定子绕组接成星形(Y形)或三角形(△形),具体接线方式如图2所示。
图2三相异步电动机定子绕组的接线图电动机如果接成星形,则电机每相绕组承受电压是电源的相电压,如果接成三角形,则电机每相绕组承受电压是电源的线电压。
具体是星形连接还是三角形连接应考虑电机的额定电压值。
例如:电机额定电压是220V应采用星形连接,如额定电压是380V 应采用三角形连接。
2.转子部分由转子铁心、转子绕组和转轴等部分组成。
转子铁心也由硅钢片叠成,并固定在转轴上。
转子的外圆周上也有若干分布均匀的平行槽,用于安置转子绕组。
转子绕组根据其结构可分为鼠笼式和绕线式两种(1)鼠笼式转子鼠笼式转子是在转子铁心的每一条槽内,插入一根裸导条,在铁心两端分别用两处短路环把导条连接成一个整体,形成一个自身闭合的短路绕组。
如去掉铁心,整个绕组就像一个鼠笼,所以称为鼠笼式电动机,中小型电动机的笼型转子一般采用铸铝,大型电动机则采用铜导条,如图3所示。
图3笼式转子示意图(2)绕线式转子绕线式转子是在平行槽内嵌入对称的三相绕组,并把它接成星形,其末端接在一起,首端分别接在转轴上的三个彼此绝缘的滑环上,经电刷与外电路连接,这种电动机称为绕线式电动机。
如图4所示图4绕组式转子。
摘要进一少巩固和加深“电机与拖动”课程的基本知识,了解绕线型异步电动机转子串电阻起动设计知识在工程实际中的应用。
综合运用“电机与拖动”课程和等候课程的理论及生产实际知识去分析和解决直流电动机调速设计中的一些问题,进行电机设计的训练。
通过计算和绘图,学会运用标准、规范的手册、图册和查阅有关资料等,培养电机设计的基本技能。
掌握绕线型异步电动机转子串电阻起动的原理与步骤;培养独立的思维和动手能力。
一、绕线型异步电动机转子串电阻起动设计原理本次课程设计的主要内容为绕线型异步电动机转子串电阻起动。
为了理解这一课程设计的主要内容,首先必须了解一些与之相关的内容。
三相异步电动机的定义:旋转电机都是利用电与磁的互相转化和互相作用制成的。
三相异步电动机则是利用三相电流通过三相绕组产生在空间旋转的磁场。
三相异步电动机的工作原理:为了能形象的说明问题,将定子三相绕组通入三相电流后产生的旋转磁场用一对旋转的磁极来表示,它以同步转速n0顺时针方向旋转。
于是,转子绕组切割磁感线而产生感应电动势,它的方向可用右手定则来确定。
在N极下,穿出纸面,在S极下,进入纸面。
由于转子绕组是闭合的,在交变的感应电动势作用下,其中就有交变的感应电流流动。
各导体中的感应电流的有功分量和感应电动势同相,两者的方向一致。
根据安培定律,导体中电流的有功分量和旋转磁场互相作用而产生电磁力F,它们的方向按照左手定则来决定。
电磁力将对转子产生电磁转矩,推动转子沿着旋转磁场的旋转方向转动。
至于转子导体中电流的无功分量,因滞后感应电动势90°,根据左手定则,这时电磁力F的作用彼此抵消,不会构成电磁转矩。
由于转子与旋转磁场之间有相对运动时,转子绕组才会切割磁感线而产生感应电动势和感应电流,才能产生电磁转矩,所以转子的转速总是小于同步转速,两者不可能相等,故称为异步电动机,又称感应电动机。
二、异步电动机的结构1.定子(静止部分)1)定子铁心作用:电机磁路的一部分,并在其上放置定子绕组。
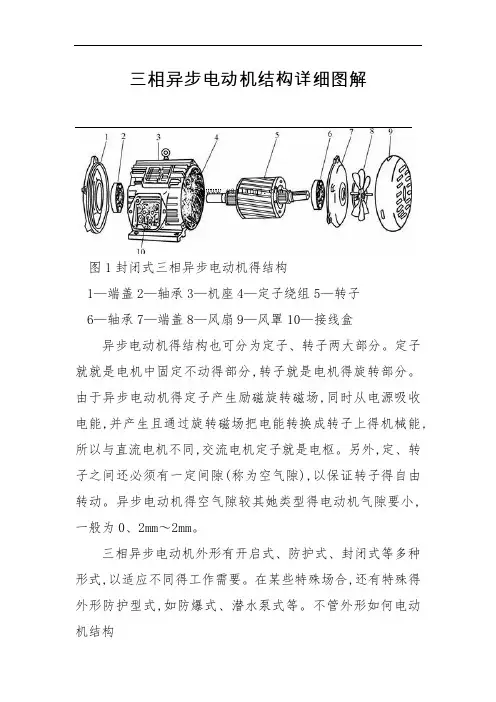
三相异步电动机结构详细图解图1封闭式三相异步电动机得结构1—端盖2—轴承3—机座4—定子绕组5—转子6—轴承7—端盖8—风扇9—风罩10—接线盒异步电动机得结构也可分为定子、转子两大部分。
定子就就是电机中固定不动得部分,转子就是电机得旋转部分。
由于异步电动机得定子产生励磁旋转磁场,同时从电源吸收电能,并产生且通过旋转磁场把电能转换成转子上得机械能,所以与直流电机不同,交流电机定子就是电枢。
另外,定、转子之间还必须有一定间隙(称为空气隙),以保证转子得自由转动。
异步电动机得空气隙较其她类型得电动机气隙要小,一般为0、2mm~2mm。
三相异步电动机外形有开启式、防护式、封闭式等多种形式,以适应不同得工作需要。
在某些特殊场合,还有特殊得外形防护型式,如防爆式、潜水泵式等。
不管外形如何电动机结构基本上就是相同得。
现以封闭式电动机为例介绍三相异步电动机得结构。
如图1所示就是一台封闭式三相异步电动机解体后得零部件图。
1、定子部分定子部分由机座、定子铁心、定子绕组及端盖、轴承等部件组成。
(1)机座。
机座用来支承定子铁心与固定端盖。
中、小型电动机机座一般用铸铁浇成,大型电动机多采用钢板焊接而成。
(2)定子铁心。
定子铁心就是电动机磁路得一部分。
为了减小涡流与磁滞损耗,通常用0、5mm厚得硅钢片叠压成圆筒,硅钢片表面得氧化层(大型电动机要求涂绝缘漆)作为片间绝缘,在铁心得内圆上均匀分布有与轴平行得槽,用以嵌放定子绕组。
(a)直条形式(b)斜条形式图2 笼型异步电动机得转子绕组形式(3)定子绕组。
定子绕组就是电动机得电路部分,也就是最重要得部分,一般就是由绝缘铜(或铝)导线绕制得绕组联接而成。
它得作用就就是利用通入得三相交流电产生旋转磁场。
通常,绕组就是用高强度绝缘漆包线绕制成各种型式得绕组,按一定得排列方式嵌入定子槽内。
槽口用槽楔(一般为竹制)塞紧。
槽内绕组匝间、绕组与铁心之间都要有良好得绝缘。
如果就是双层绕组(就就是一个槽内分上下两层嵌放两条绕组边),还要加放层间绝缘。
2—17 绕线式异步电动机起动和调速控制线路绕线式异步电动机的特点是:它的转子上绕有绕组,并且通过转子上的集电环〔俗称滑环〕在转子绕组中串接附加的电抗。
当转子回路中的电抗改变时,电动机的力矩特性将改变,适当地调节转子回路中的电阻,可以得到理想的起动状态。
用绕线式异步电动机可以得到很大的起动转距,同时起动时的电流也减少很多。
所以在对起动转距,调速特性要求较高的机械中〔如卷扬机、桥式起动机等〕,常常使用绕线式异步电动机。
绕线式异步电动机的缺点是:电动机比较复杂、造价也高、耐用性能较差、效率也稍低。
绕线式异步电动机的起动方法有如下三种:一、转子绕组串接电阻;二、转子绕组串接频敏变阻器;三、用凸轮控制器。
下面分别详细介绍绕线式电动机的三种起动方法:一、转子绕组串接电阻起动控制线路转子绕组串接电阻控制绕线式异步电动机的线路又分为:用按钮开关、用时间继电器、用电流继电器三种不同的控制线路,下面依次介绍如下:1、用按钮开关控制绕线式异步电动机的控制线路。
用按钮开关控制绕线式电动机的控制线路如图21701所示:图21701的工作原理简述如下:图中:KM1、KM2、KM3、KM4、四个接触器除KM1作接通电源用外,其余三个均是短路转子回路中的起动电阻用的。
SB1为停顿按钮;SB2为起动按钮,SB3、SB4、SB5均为切除电阻用的按钮开关。
起动电动机时,按下SB2,KM1获电吸合并自锁,电动机转子绕组内串入R1、R2、R3全部电阻起动。
按下SB3,KM2获电吸合并自锁,其主触头KM1闭合,短路R1,电动机加速运转;同理,按SB4、SB5分别短路R2及R3,电动机一级、一级加速运转。
并且当KM3闭合时,其常闭触头KM3切断KM2的线圈回路;KM4闭合时,其常闭触头KM4切断KM3、〔包括KM2〕的线圈回路。
当电动机全速运转时,只有KM1、KM4两个接触器获电工作,其余均断开。
接触器,KM2、KM3、KM4的常闭触头串联在KM1线圈回路中的作用是,保证电动机在转子回路中电阻全部参加的条件下才能起动。
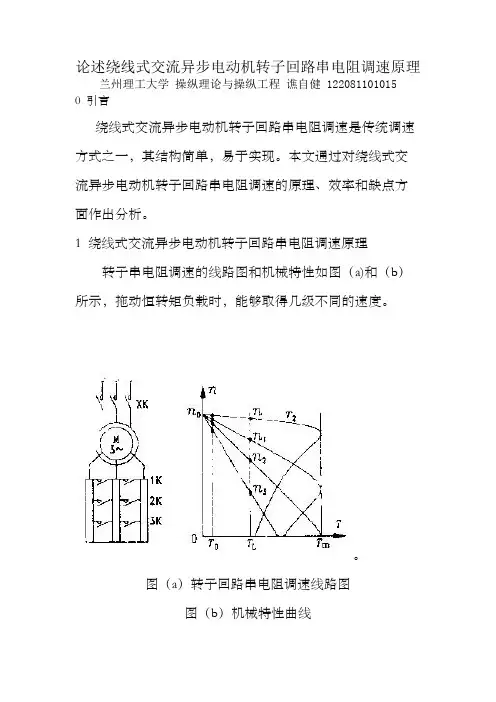
论述绕线式交流异步电动机转子回路串电阻调速原理兰州理工大学操纵理论与操纵工程谯自健 1220811010150 引言绕线式交流异步电动机转子回路串电阻调速是传统调速方式之一,其结构简单,易于实现。
本文通过对绕线式交流异步电动机转子回路串电阻调速的原理、效率和缺点方面作出分析。
1 绕线式交流异步电动机转子回路串电阻调速原理转子串电阻调速的线路图和机械特性如图(a)和(b)所示,拖动恒转矩负载时,能够取得几级不同的速度。
图(a)转子回路串电阻调速线路图图(b)机械特性曲线依照电机学原理知:60-S f n p =极对数(1) 其中n 为电动机转速,f 为电源频率,S 为转差率(1)Pm S Pe =-(2) *Pa S Pe = (3)其中Pe 为异步电动机电磁功率,Pm 为异步电动机机械功率,Pa 为转子铜耗即转差功率因此得::1:(1):Pe Pm Pa S S =- 由式(4)能够看出SPm 减小,相反转差功率Pa 在增大,而转速n 随S 的增大而减小。
因此所绕线式异步交流电动机转子回路串电阻调速的实质是通过改变转差功率或转差率的大小来调剂转速n 的。
当串入的电阻阻值越大那么转差功率增大,随之转差率S 变大,从而使转速n 下降。
2 绕线式异步交流电动机转子回路串电阻调速的优缺点 绕线式转子异步电动机,通过转子回路串入不同数值的电阻R ,改变转差率S 调速的传统方式,能够取得不同斜率的机械特性,从而实现速度的调剂。
这种调速方式简单方便,但存在如下缺点:(1)调速是有级的,不滑腻。
(2)在深度调速机会械特性很软,致使负载有较小转变,即可引发转速的专门大的波动,降低了静态调速精度。
(3)转差功率Pa 消耗在电阻发烧上,效率低。
由于是通过增大转子回路的电阻值来降低电动机转速的,当拖动恒转矩负载时,转速n 越低,转差率S 就越大,从而使得转差功率也愈大,电能消耗大,效率更低。
当转差功率S=0.5时,效率η<0.5。
三相异步电动机启动控制原理图1。
三相异步电动机的点动控制点动正转控制线路是用按钮、接触器来控制电动机运转的最简单的正转控制线路。
所谓点动控制是指:按下按钮,电动机就得电运转;松开按钮,电动机就失电停转。
典型的三相异步电动机的点动控制电气原理图如图3-1(a)所示.点动正转控制线路是由转换开关QS、熔断器FU、启动按钮SB、接触器KM及电动机M组成。
其中以转换开关QS作电源隔离开关,熔断器FU作短路保护,按钮SB控制接触器KM的线圈得电、失电,接触器KM 的主触头控制电动机M的启动与停止。
点动控制原理:当电动机需要点动时,先合上转换开关QS,此时电动机M尚未接通电源.按下启动按钮SB,接触器KM的线圈得电,带动接触器KM的三对主触头闭合,电动机M便接通电源启动运转。
当电动机需要停转时,只要松开启动按钮SB,使接触器KM的线圈失电,带动接触器KM的三对主触头恢复断开,电动机M失电停转。
在生产实际应用中,电动机的点动控制电路使用非常广泛,把启动按钮SB换成压力接点、限位节点、水位接点等,就可以实现各种各样的自动控制电路,控制小型电动机的自动运行。
2。
三相异步电动机的自锁控制三相异步电动机的自锁控制线路如图3—2所示,和点动控制的主电路大致相同,但在控制电路中又串接了一个停止按钮SB1,在启动按钮SB2的两端并接了接触器KM的一对常开辅助触头。
接触器自锁正转控制线路不但能使电动机连续运转,而且还有一个重要的特点,就是具有欠压和失压保护作用。
它主要由按钮开关SB(起停电动机使用)、交流接触器KM(用做接通和切断电动机的电源以及失压和欠压保护等)、热继电器(用做电动机的过载保护)等组成。
欠压保护:“欠压”是指线路电压低于电动机应加的额定电压。
“欠压保护"是指当线路电压下降到某一数值时,电动机能自动脱离电源电压停转,避免电动机在欠压下运行的一种保护。
因为当线路电压下降时,电动机的转矩随之减小,电动机的转速也随之降低,从而使电动机的工作电流增大,影响电动机的正常运行,电压下降严重时还会引起“堵转"(即电动机接通电源但不转动)的现象,以致损坏电动机.采用接触器自锁正转控制线路就可避免电动机欠压运行,这是因为当线路电压下降到一定值(一般指低于额定电压85%以下)时, 接触器线圈两端的电压也同样下降到一定值,从而使接触器线圈磁通减弱,产生的电磁吸力减小。
转子绕组作用是切割定子旋转磁场产生感应电动势及电流,并形成电磁转矩而使电动机旋转。
根据构造的不同分为鼠笼式转子和绕线式转子。
如图1所示。
图1 转子绕组(1)鼠笼式转子若去掉转子铁心,整个绕组的外形像一个鼠笼,故称笼型绕组。
小型笼型电动机采用铸铝转子绕组,对于100KW以上的电动机采用铜条和铜端环焊接而成。
如图2所示。
图2 笼型转子a)笼型绕组b)转子外形c)铸铝笼型转子(2)绕线式转子绕线转子绕组与定子绕组相似,也是一个对称的三相绕组,一般接成星形,三个出线头接到转轴的三个集电环(滑环)上,再通过电刷与外电路联接,如图3所示。
图3 绕线式转子异步电动机的转子接线示意图a)接线图b)提刷装置异步电机转子的组成和绕线型异步电动机转子接线示意图异步电机的转子由转子铁心、转子绕组和转轴等组成。
转子铁心也是电机磁路组成部分。
铁心材料也采用0.5mm硅钢片叠成。
铁心与转轴之间必须可靠连接以传递转矩。
转子绕组能够感应电动势、流通电流、产生电磁转矩。
从结构上可分为笼型和绕线型两种:1.笼型转子(Cage rotor)图1 笼型转子绕组a)铜导条b)铝导条笼型转子绕组的结构与定子绕组不同,在转子铁心槽中各有一根导条,在铁心两端槽口外,由二个端环分别把所有导条的两端都连接起来,直接闭合而构成短路。
如果去掉铁心,绕组的形状就象鼠笼,又称鼠笼式转子(Squirrel Cage rotor)见图1。
笼型转子结构简单,制造方便,绕组的材料有两种:有适用于中小型电机的铸铝转子,把导条、端环以及风叶一起铸出;适用于大中型电机的焊接笼型,常用铜条插入转子槽内,再在两端焊上端环而成。
2.绕线型转子(Wound-rotor)绕线型转子绕组和定子绕组相似,并且具有和定子绕组相同的极对数。
三相绕组采用星形接法,其出线端分别与转轴上的三个滑环连接,然后通过电刷把电流引出,在外部形成短路,并且可以接人附加电阻,如图2所示。
与笼型转于相比较,绕线型转子造价高,维护复杂。
工厂典型电气线路带有示意接线图工厂典型电气线路一、鼠笼式异步电动机起动线路(一般控制线路)1、手动正转起动线路2、点动正转起动线路3、点动正反转起动线路原理图接线图4、电动机单向运行带点动原理图接线图5、电动机手动选择单向运行或带点动的控制电路原理图接线图6、具有自锁功能的正转起动线路7、倒顺开关控制正反转起动线路 8、接触器连锁控制正反转起动线路9、按钮和接触器双重连锁控制正反转起动线路10、接触器控制正反转起动及点动线路 11、行程开关控制正反转起动线路12、电动机顺序启动控制电路13、电动机分别启动顺序停止控制电路14、电动机顺序启动、顺序停止控制电路(降压起动线路)15、定子串电阻或电抗器降压起动线路原理:在电动机起动过程中,定子回路中串入电阻(或电抗器),用电阻(或电抗器)分压,以达到降压起动的目的。
起动完毕后,串入的电阻(或电抗器)被短接,电动机进入全压运行状态。
采用电阻(或电抗器)降压起动电动机,起动时施加在定子绕组上的电压为全压的0.5倍左右,所以其起动转矩为额定电压下起动转矩的0.25倍左右(转矩与所加电压的平方成正比)。
由于起动电阻(或电抗器)上的能耗很大,因此该线路只能用在对起动转矩要求不高的场合。
16、手动Y-∆降压起动线路原理:电动机起动时将定子绕组接成星形“Y”,此时三相绕组施加的电压为相电压220V,起动完毕后,再将三相绕组接成三角形“∆”,三相绕组施加电压为线电压380V。
Y-∆降压起动方式,只适应在正常运行时定子绕组接成三角形鼠笼式异步电动机。
17、按钮控制Y-∆降压起动线路18、大容量三相笼型电动机Y-∆降压起动手动控制线路19、自动控制Y-∆降压起动线路20、带防止飞弧短路保护功能的Y-∆降压起动线路只要有电弧形成的残压,KA就吸合。
21、按钮控制自耦变压器降压起动线路电动机起动时,定子绕组得到的电压时自耦变压器的二次电压,起动完毕后,自耦变压器退出电路,电动机进入全压正常运行。
三相异步电动机结构详细图解图1封闭式三相异步电动机的结构1—端盖2—轴承3-机座4—定子绕组5—转子6—轴承7—端盖8—风扇9-风罩10-接线盒异步电动机的结构也可分为定子。
转子两大部分。
定子就是电机中固定不动的部分,转子是电机的旋转部分。
由于异步电动机的定子产生励磁旋转磁场,同时从电源吸收电能,并产生且通过旋转磁场把电能转换成转子上的机械能,所以与直流电机不同,交流电机定子是电枢。
另外,定.转子之间还必须有一定间隙(称为空气隙),以保证转子的自由转动。
异步电动机的空气隙较其他类型的电动机气隙要小,一般为0。
2mm~2mm。
三相异步电动机外形有开启式.防护式。
封闭式等多种形式,以适应不同的工作需要。
在某些特殊场合,还有特殊的外形防护型式,如防爆式。
潜水泵式等。
不管外形如何电动机结构基本上是相同的。
现以封闭式电动机为例介绍三相异步电动机的结构。
如图1所示是一台封闭式三相异步电动机解体后的零部件图。
1。
定子部分定子部分由机座。
定子铁心.定子绕组及端盖.轴承等部件组成.(1)机座。
机座用来支承定子铁心和固定端盖.中.小型电动机机座一般用铸铁浇成,大型电动机多采用钢板焊接而成。
(2)定子铁心。
定子铁心是电动机磁路的一部分。
为了减小涡流和磁滞损耗,通常用0。
5mm厚的硅钢片叠压成圆筒,硅钢片表面的氧化层(大型电动机要求涂绝缘漆)作为片间绝缘,在铁心的内圆上均匀分布有与轴平行的槽,用以嵌放定子绕组。
(a)直条形式(b)斜条形式图2 笼型异步电动机的转子绕组形式(3)定子绕组。
定子绕组是电动机的电路部分,也是最重要的部分,一般是由绝缘铜(或铝)导线绕制的绕组联接而成。
它的作用就是利用通入的三相交流电产生旋转磁场.通常,绕组是用高强度绝缘漆包线绕制成各种型式的绕组,按一定的排列方式嵌入定子槽内。
槽口用槽楔(一般为竹制)塞紧。
槽内绕组匝间.绕组与铁心之间都要有良好的绝缘。
如果是双层绕组(就是一个槽内分上下两层嵌放两条绕组边),还要加放层间绝缘。
实验六三相异步电动机的起动、反转与调速一、实验目的掌握三相异步电动机起动、反转和调速的方法。
二、实验项目1、三相绕线式异步电动机直接起动2、三相绕线式异步电动机转子绕组串电阻起动3、三相绕线式异步电动机转子绕组串电阻调速4、三相异步电动机转向改变5、星形(Y)——三角形(Δ)换接起动三、实验设备该实验是在DDSZ-1型电机及电气技术实验装置上完成的。
本次实验使用设备包括:1、DD01电源控制屏2、D33挂件3、D32挂件4、D51挂件5、DJ17-3绕线式异步电动机转子专用箱6、DD03测试台和三相绕线式异步电动机本次实验使用DD01电源控制屏上方的交流电源。
D33挂件,共有三个完全相同的多量程指针式交流电压表,本次实验选用其中的一块电压表。
D32挂件,共有三个完全相同的多量程指针式交流电流表,本次实验选用其中的一块电流表。
D51挂件,由波形测试部分和开关S1、S2、S3组成,本次实验只使用开关S1 。
DJ17-3转子专用箱的电阻值是可调的,分0Ω、20Ω、40Ω、60Ω、∞五档,实验中作为异步电动机转子绕组的串接电阻。
DD03测试台包括导轨、测速发电机和指针式转速表三相绕线式异步电动机,定子三相绕组有六个接线端,转子三相绕组有四个接线端。
四、实验内容及方法接线之前:开启电源总开关,按下绿色“启动”按钮,将电源控制屏上方的交流“电压指示切换”开关切换到“三相调压输出”位置,旋转控制屏左侧的三相调压器旋钮,将其输出电压调到220V后,按下红色“停止”按钮。
1、三相绕线式异步电动机起动、调速、改变转向实验三相绕线式异步电动机起动、调速、改变转向实验接线图图6-1 三相绕线式异步电动机起动、调速、改变转向实验接线图三相绕线式异步电动机定子绕组接线:定子绕组按星形接法从“三相调压输出”U端接到交流电流表“2.5A”黄色端,从电流表黑色“*”端接到异步电动机定子绕组A端,分别从“三相调压输出”V、W端接到定子绕组的B端和C端,将电动机定子绕组的另外三个接线端X、Y、Z用导线连接。
转子绕组作用是切割定子旋转磁场产生感应电动势及电流,并形成电磁转矩而使电动机旋转。
根据构造的不同分为鼠笼式转子和绕线式转子。
如图1所示。
图1 转子绕组
(1)鼠笼式转子
若去掉转子铁心,整个绕组的外形像一个鼠笼,故称笼型绕组。
小型笼型电动机采用铸铝转子绕组,对于100KW以上的电动机采用铜条和铜端环焊接而成。
如图2所示。
图2 笼型转子
a)笼型绕组b)转子外形c)铸铝笼型转子
(2)绕线式转子
绕线转子绕组与定子绕组相似,也是一个对称的三相绕组,一般接成星形,三个出线头接到转轴的三个集电环(滑环)上,再通过电刷与外电路联接,如图3所示。
图3 绕线式转子异步电动机的转子接线示意图
a)接线图b)提刷装置
异步电机转子的组成和绕线型异步电动机转子接线示意图
异步电机的转子由转子铁心、转子绕组和转轴等组成。
转子铁心也是电机磁路组成部分。
铁心材料也采用0.5mm硅钢片叠成。
铁心与转轴之间必须可靠连接以传递转矩。
转子绕组能够感应电动势、流通电流、产生电磁转矩。
从结构上可分为笼型
和绕线型两种:
1.笼型转子(Cage rotor)
图1 笼型转子绕组
a)铜导条b)铝导条
笼型转子绕组的结构与定子绕组不同,在转子铁心槽中各有一根导条,在铁心两端槽口外,由二个端环分别把所有导条的两端都连接起来,直接闭合而构成短路。
如果去掉铁心,绕组的形状就象鼠笼,又称鼠笼式转子(Squirrel Cage rotor)见图1。
笼型转子结构简单,制造方便,绕组的材料有两种:有适用于中小型电机的铸铝转子,把导条、端环以及风叶一起铸出;适用于大中型电机的焊接笼型,常用铜条插入转子槽内,再在两端焊上端环而成。
2.绕线型转子(Wound-rotor)
绕线型转子绕组和定子绕组相似,并且具有和定子绕组相同的极对数。
三相绕组采用星形接法,其出线端分别与转轴上的三个滑环连接,然后通过电刷把电流引出,在外部形成短路,并且可以接人附加电阻,如图2所示。
与笼型转于相比较,绕线型转子造价高,维护复杂。
因此,仅用于要求起动转矩大,起动电流小或需要调速的场合。
图2 绕线型异步电动机转子接线示意图。