基于图像视觉伺服的模糊比例积分微分控制系统
- 格式:doc
- 大小:38.50 KB
- 文档页数:13
《基于模糊控制的高精度伺服速度控制器的设计与实现》基于模糊控制的高精度伺服速度控制器设计与实现一、引言随着工业自动化和智能制造的快速发展,高精度伺服速度控制器的设计与实现显得尤为重要。
在许多工业应用中,如机器人、数控机床、自动化生产线等,伺服速度控制器的性能直接影响到整个系统的稳定性和工作效率。
传统的PID控制方法在某些情况下难以满足高精度控制的需求,因此,本文提出了一种基于模糊控制的高精度伺服速度控制器设计与实现的方法。
二、模糊控制理论基础模糊控制是一种基于模糊集合理论的控制方法,其核心思想是将人的经验知识和控制策略用模糊规则表示,然后通过模糊推理实现控制。
模糊控制具有较好的鲁棒性和适应性,特别适用于非线性、时变和复杂系统的控制。
三、高精度伺服速度控制器设计1. 系统架构设计本设计采用数字化控制系统架构,包括微处理器、传感器、执行器等部分。
微处理器负责接收传感器信号,根据模糊控制算法计算输出信号,驱动执行器实现伺服速度控制。
2. 模糊控制器设计模糊控制器是本设计的核心部分,包括模糊化、规则库、推理机和反模糊化四个部分。
首先,将速度误差和误差变化率进行模糊化处理;然后,根据模糊规则库进行推理,得到控制量;最后,通过反模糊化将控制量转换为实际输出。
四、高精度伺服速度控制器实现1. 硬件实现硬件部分包括微处理器、传感器、执行器等。
微处理器采用高性能的DSP或FPGA芯片,实现高速的数据处理和运算。
传感器用于检测伺服电机的速度和位置信息,执行器则根据微处理器的输出信号驱动伺服电机。
2. 软件实现软件部分包括操作系统、驱动程序和模糊控制算法等。
操作系统采用实时操作系统,保证系统的实时性和稳定性。
驱动程序负责与硬件进行通信,实现数据的采集和输出。
模糊控制算法则是本设计的核心软件部分,需要根据具体的应用场景和需求进行设计和优化。
五、实验与分析为了验证本设计的有效性,我们进行了大量的实验和分析。
实验结果表明,基于模糊控制的高精度伺服速度控制器具有较好的鲁棒性和适应性,能够有效地提高系统的稳定性和工作效率。
《基于模糊控制的高精度伺服速度控制器的设计与实现》基于模糊控制的高精度伺服速度控制器设计与实现一、引言随着工业自动化和智能制造的快速发展,高精度伺服速度控制器的设计与实现成为了工业控制领域的重要研究方向。
模糊控制作为一种智能控制方法,在处理非线性、不确定性和时变性的问题中,展现出优秀的鲁棒性和灵活性。
因此,本文以基于模糊控制的高精度伺服速度控制器设计与实现为研究对象,旨在通过设计一种高效的模糊控制算法,提高伺服系统的速度控制精度和稳定性。
二、系统概述本系统主要由伺服电机、驱动器、传感器和模糊控制器等部分组成。
其中,伺服电机负责执行运动任务,驱动器负责电机的驱动和控制,传感器负责实时监测电机的速度和位置信息,模糊控制器则根据传感器的反馈信息,采用模糊控制算法对电机进行精确的速度控制。
三、模糊控制算法设计1. 模糊化处理模糊化处理是模糊控制算法的关键步骤之一。
本系统采用将速度误差和速度误差变化率作为输入,通过设定论域、量化等级和隶属度函数等方法,将输入的精确量转化为模糊量。
其中,论域的设定需根据实际系统情况进行调整,量化等级和隶属度函数的选取则需根据经验和实践进行优化。
2. 制定模糊规则模糊规则是模糊控制算法的核心部分。
本系统根据伺服系统的特性和控制要求,制定了一系列模糊规则。
这些规则主要基于专家知识和实际操作经验,通过“if-then”的形式进行描述。
在实际应用中,还需根据系统的实际运行情况进行规则的调整和优化。
3. 解模糊化处理解模糊化处理是将模糊推理结果转化为精确控制量的过程。
本系统采用重心法进行解模糊化处理,将模糊推理结果转化为一个精确的控制量,用于驱动伺服电机进行精确的速度控制。
四、系统实现1. 硬件实现本系统的硬件部分主要包括伺服电机、驱动器、传感器等。
其中,伺服电机选用高性能的永磁同步电机,驱动器采用先进的数字驱动技术,传感器则选用高精度的速度传感器。
在实际应用中,还需根据实际需求进行硬件的选型和配置。
基于图像的机器人视觉伺服控制研究的开题报告一、题目基于图像的机器人视觉伺服控制研究二、背景与意义机器人的成功应用已经改变了许多行业的生产方式,特别是在制造、医疗、军事等领域具有广泛的应用前景。
在许多情况下,机器人需要从图像中获取信息,通过对图像进行处理,机器人能够快速、精确地执行任务。
机器人视觉伺服控制是指利用视觉反馈来实现机器人运动的闭环控制。
基于图像的机器人视觉伺服控制是当前机器人领域的热点问题。
该技术不仅能够提高机器人在复杂环境下的适应性和处理能力,也能够提高机器人的抓取、搬运和装配等操作的精度和效率。
因此,研究基于图像的机器人视觉伺服控制,对于提高机器人的控制精度、智能化水平和功能性具有重要的实际意义。
三、研究内容本研究将系统地研究基于图像的机器人视觉伺服控制技术,探索其实现原理与应用方式,主要包括以下内容:1. 基于图像的机器人视觉伺服控制理论2. 基于特征提取技术的图像处理与分析3. 基于机器学习的图像识别与分类算法4. 基于视觉反馈的机器人运动控制方法5. 基于实验验证的机器人视觉伺服控制技术应用四、研究方法本研究采用实验室实验结合数值模拟的方法进行研究。
首先,搭建基于图像的机器人视觉伺服控制系统,包括机器人、图像采集设备、图像处理和分析软件等;其次,对图像进行特征提取和分类算法的设计和实现;再次,根据图像信息设计基于视觉反馈的机器人运动控制。
五、预期结果本研究预期能够设计出一种基于图像的机器人视觉伺服控制技术,并进行应用实验验证。
具体预期结果包括:1. 实现基于图像的机器人视觉伺服控制系统的设计与实现。
2. 实现基于特征提取和分类算法的图像处理与分析。
3. 实现基于视觉反馈的机器人运动控制方法。
4. 经过实验验证,探究该技术在机器人操作中的性能。
六、研究意义本研究对于机器人在复杂环境下的精确定位、抓取和搬运具有重要的实际意义,同时对于机器人智能化和自主化水平的提高也具有重要的意义。
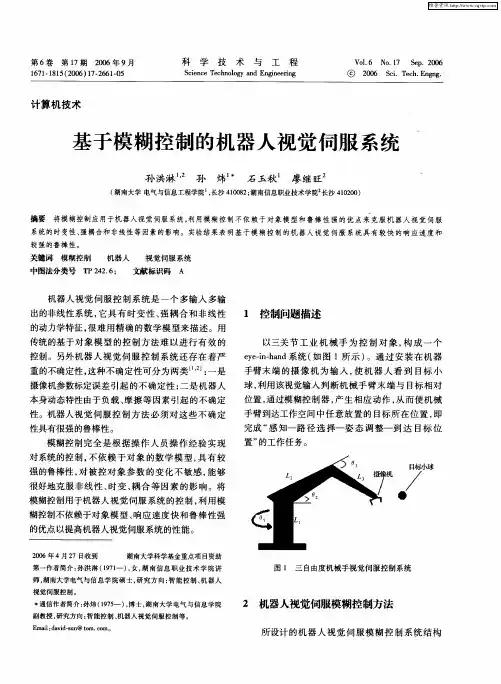
基于图像的机器人视觉伺服系统研究班级:自121姓名:成佳宇学号:3120413006基于图像的机器人视觉伺服系统摘要本文采用基于图像的眼在手(eye in hand)视觉伺服结构,通过计算图像雅克比矩阵实现机械手的定位任务。
本文采用应用最广泛的机器人工具箱(Robotics Toolbox for Matlab),在该工具箱的基础上,运用Sub-system实现Matlab和Simulink的有机结合,建立基于图像反馈的六自由度PUMA560机器人视觉伺服系统Simulink模型,仿真验证该模型的有效性。
关键字:puma560机器人;视觉伺服;图像的雅可比矩阵Abstract:In this paper,we use Image-based visual servoing control system, via image jacobin matrix function the positioning of the manipulator by calculation task. on the basis of Robotics Toolbox for Matlab, and using Sub - system to realize the organic combination of Matlab and Simulink, based on the image feedback Simulink model of six degrees of freedom PUMA560 robot visual servoing system, the simulation verify the validity of the model.Keyword:PUMA560robot;IBVS;Image jacobin引言:机器人视觉伺服己成为机器人领域重要的研究内容之一,但是机器人视觉伺服系统是一个十分复杂的非线性系统。
基于变论域模糊比例积分微分控制的介入手术机器人系统研究吴涵宇;马旭
【期刊名称】《天津理工大学学报》
【年(卷),期】2024(40)2
【摘要】在微创介入手术中,保证主从端导管位移的同步性,可解决医生能够有效控制主端电机转速来实现力反馈,提高手术的安全性,避免给病人带来不必要的风险。
对传统比例积分微分(proportion integration differentiation,PID)主从端力反馈
控制加以优化,使用变论域模糊PID控制算法对主从端力反馈进行监控,调节伸缩因子来获取最合适的PID数值,能够保证主从端的同步性。
把两种控制方法进行主从
端位移同步实验比较得知,变论域控制算法下的平均误差和方差都小于传统PID,表
明了该算法对主从端同步控制的优越性,验证了变论域控制方法的有效性和可行性。
【总页数】7页(P70-76)
【作者】吴涵宇;马旭
【作者单位】天津理工大学电气工程与自动化学院
【正文语种】中文
【中图分类】TP242
【相关文献】
1.微创手术导管机器人系统变论域模糊PID控制
2.基于图像视觉伺服的模糊比例
积分微分控制系统3.谷电相变电蓄热供暖分工况变论域模糊比例、积分、微分自
适应前馈补偿控制4.基于补偿与模糊比例积分微分控制的凸轮刀系统定位研究5.基于变论域模糊PID的航空转台控制系统研究
因版权原因,仅展示原文概要,查看原文内容请购买。
《基于模糊控制的高精度伺服速度控制器的设计与实现》基于模糊控制的高精度伺服速度控制器设计与实现一、引言随着工业自动化和智能制造的快速发展,高精度伺服速度控制器的设计与实现显得尤为重要。
在许多工业应用中,如机器人、数控机床、自动化生产线等,伺服速度控制器的性能直接影响到整个系统的稳定性和精度。
传统的PID控制方法在某些复杂、非线性的应用场景中存在局限性。
因此,本文提出了一种基于模糊控制的高精度伺服速度控制器设计与实现方案。
二、模糊控制理论简介模糊控制是一种基于模糊集合理论的控制方法,其基本思想是将人类的经验知识以模糊规则的形式进行表示,并通过计算机程序实现自动化控制。
模糊控制具有较强的适应性和鲁棒性,适用于处理复杂、非线性的系统。
三、系统设计1. 硬件设计伺服速度控制器的硬件设计主要包括微处理器、传感器、执行器等部分。
微处理器是控制器的核心,负责接收传感器信号、执行模糊控制算法并输出控制信号。
传感器用于检测电机的速度和位置信息,执行器则根据控制信号驱动电机进行运动。
2. 软件设计软件设计包括模糊控制算法的设计和实现。
首先,根据系统的实际需求和经验知识,制定模糊规则库。
然后,通过计算机程序实现模糊推理和决策过程,将模糊规则转化为控制输出。
此外,还需设计合理的系统架构和通信接口,以保证系统稳定可靠地运行。
四、算法实现1. 数据预处理系统通过传感器实时采集电机的速度和位置信息。
为了确保数据准确性和可靠性,需对数据进行预处理,包括滤波、降噪等操作。
2. 模糊化处理将预处理后的数据转化为模糊变量,以便进行模糊推理。
模糊化处理包括确定输入输出的论域、隶属度函数等。
3. 模糊推理与决策根据制定的模糊规则库,通过计算机程序实现模糊推理和决策过程。
根据当前系统的状态和目标,计算出合适的控制输出。
4. 反模糊化处理将计算得到的控制输出转化为精确的控制信号,以便驱动电机进行运动。
反模糊化处理的方法有多种,如重心法、最大隶属度法等。
《基于模糊控制的高精度伺服速度控制器的设计与实现》基于模糊控制的高精度伺服速度控制器设计与实现一、引言随着工业自动化和智能制造的不断发展,对高精度伺服系统的速度控制提出了更高要求。
伺服速度控制器的性能直接影响着工业产品的制造质量和效率。
传统速度控制方法往往存在响应速度慢、精度低等问题。
为了解决这些问题,本文提出了一种基于模糊控制的高精度伺服速度控制器设计与实现方案。
二、系统概述本系统主要由伺服电机、编码器、模糊控制器和上位机组成。
其中,伺服电机负责执行速度控制任务,编码器实时反馈电机速度信息,模糊控制器负责处理反馈信息和进行控制决策,上位机负责与模糊控制器进行通信,并监控整个系统的运行状态。
三、模糊控制器的设计1. 模糊化处理模糊化处理是将电机速度的实时反馈值和目标值进行模糊化处理,将精确的数值转化为模糊语言变量。
这一过程包括确定模糊子集、论域和隶属度函数等。
2. 模糊规则库的设计根据系统特性和经验知识,设计合理的模糊规则库。
这些规则根据电机速度的实时反馈和目标值,决定下一时刻的控制策略。
3. 模糊推理机的实现模糊推理机是模糊控制器的核心部分,根据模糊规则库和实时反馈信息,进行模糊推理,得出下一时刻的控制决策。
4. 解模糊化处理解模糊化处理是将模糊推理结果转化为精确的控制量,以驱动伺服电机执行相应的动作。
四、伺服速度控制器的实现1. 硬件实现伺服速度控制器的硬件部分主要包括微处理器、编码器接口、电机驱动器等。
微处理器负责运行模糊控制器程序,编码器接口负责实时获取电机速度信息,电机驱动器根据控制决策驱动伺服电机执行相应的动作。
2. 软件实现软件部分主要包括模糊控制算法的实现、与上位机的通信等。
在微处理器上运行模糊控制算法,实时处理编码器反馈的电机速度信息,并根据模糊推理结果输出相应的控制量。
同时,与上位机进行通信,接收上位机的指令和监控系统的运行状态。
五、实验结果与分析通过实验验证了基于模糊控制的高精度伺服速度控制器的性能。
《基于模糊控制的高精度伺服速度控制器的设计与实现》基于模糊控制的高精度伺服速度控制器设计与实现一、引言随着工业自动化和智能制造的快速发展,高精度伺服速度控制器在生产制造和工艺控制领域中的重要性愈发突出。
伺服系统的高效性、准确性和响应速度对于设备的工作效率和产品质量的保证起到了决定性的作用。
为了更好地应对高精度速度控制的要求,本文设计并实现了一种基于模糊控制的高精度伺服速度控制器,以期为现代工业自动化提供更优的解决方案。
二、模糊控制理论概述模糊控制是一种基于模糊集合理论的控制方法,其通过模仿人的决策过程,将精确的数学模型转化为模糊的逻辑规则,从而实现对复杂系统的有效控制。
模糊控制具有对系统参数变化和外部干扰的强鲁棒性,特别适用于非线性、时变或不确定性的系统。
三、高精度伺服速度控制器的设计1. 硬件设计硬件设计是构建高精度伺服速度控制器的基石。
设计过程中,我们主要考虑了电机驱动器、传感器、微处理器等关键部件的选型和配置。
电机驱动器应具备高响应速度和低噪声的特点,传感器应具有高精度和高稳定性的性能,微处理器则应具备强大的数据处理能力和实时性。
2. 软件设计软件设计是实现高精度伺服速度控制器的核心。
在软件设计中,我们采用了模糊控制算法作为主要控制策略。
首先,我们根据系统的特性和需求,定义了输入和输出的模糊变量,并确定了模糊变量的论域和隶属度函数。
然后,我们根据专家的经验和知识,建立了模糊规则库。
最后,通过模糊推理机实现模糊规则的推理和决策,输出控制信号驱动电机执行相应的动作。
四、实现过程1. 搭建实验平台我们搭建了一个包含电机、传感器、微处理器等关键部件的实验平台,用于验证基于模糊控制的高精度伺服速度控制器的性能。
2. 编程实现在编程实现过程中,我们采用了模块化的设计思想,将整个系统划分为模糊控制器、电机驱动器、传感器数据处理等模块。
每个模块都有明确的输入和输出接口,方便后期维护和升级。
在编程过程中,我们特别注意了代码的实时性和稳定性,以保证系统的性能和可靠性。
基于DSP的模糊控制伺服系统的设计【摘要】随着工业技术的不断发展和更多自动化产品的应用,人们对步进电动机的应用系统提出了更高的性能要求。
步进电动机的开环系统在工作状态时出现的失步和振荡等一系列问题日益突出。
为了获得更加平稳的运行过程,更高的定位精度,更宽的调速范围和便于使用等要求,人们展开了对步进电动机的闭环驱动控制系统研究,同时,这也促进了各种形式的自动化控制的步进电动机伺服系统的出现。
本文在根据伺服控制应用并分析控制伺服系统对DSP性能方面的基本要求,提出了主要针对DSP对步进电动机的模糊伺服控制系统的设计,有助于用户可以根据相应的控制要求来合理的选择DSP芯片,并以此来提高生产产品的性能和用户对产品的满意度。
【关键词】步进电动机模糊控制伺服系统DSP芯片一、混合式步进电动机和模糊控制简介目前对于混合式步进电动机中伺服控制系统的研究相对落后,因为步进电动机不同于一般的电动机,它的结构很特殊。
由于步进电动机的内部个控制变量间相互耦合且呈现出高度非线性状态,导致难以用简单的数学控制应用模型来表述。
如何才能获取能够反映混合式步进电动机内部工作机理的高精度数学模型以此来解决系统中出现的不确定信息,从而达到满意的控制效果,在研究的过程中,人们发现模糊控制是一种相对较好的选择。
模糊控制作为一种直接模拟人类思维结果的控制方式,已广泛应用于工业控制领域。
在模糊控制系统中,可以采用反激法来消除对磁阻式步进电动机的振荡。
由于模糊控制的模糊性,因此很难达到较高的稳态精度,需要对整个动态过程采用模糊控制,当系统误差出现到某一较小区间范围时采用PID控制,使其达到更高的性能。
图1展示了模糊控制器的结构框图。
图1 为模糊控制器结构图二、DSP芯片功能概况经过最近几年的高速发展,DSP芯片已逐渐取代了传统上的单片机成为伺服控制领域的主流控制芯片。
对控制领域起着重要作用的DSP芯片是传统的DSP 与单片机相结合的产物。
作为高性能控制器的DSP芯片,已广泛应用在伺服控制系统中。
机器人视觉伺服控制系统的建模与仿真近年来,随着机器人技术的不断发展,机器人视觉伺服控制系统越来越成为研究的热点。
机器人视觉伺服控制系统是指利用视觉系统采集对象信息,通过反馈控制系统输出控制信号,使机器人能够完成预定的运动轨迹并保持一定的精度的一种智能控制系统。
在机器人视觉伺服控制系统中,机器人的动作是由伺服控制系统驱动的。
伺服控制系统是一个闭环控制系统,由比例、积分、微分三个部分组成,控制器的作用是使伺服系统输出与输入信号之间的误差最小。
在建模和仿真过程中,机器人视觉系统的侦测器和伺服系统的控制器是智能机器人的核心模块。
由于机器人视觉伺服控制系统的模型十分复杂,因此建模和仿真的精度和可靠性成为了建模与仿真的重要考量因素。
在机器人视觉伺服控制系统中建模时,我们要建立完备的机器人动力学模型,掌握机器人运动状态和变形的规律。
同时,在伺服控制器的设计中,我们还需考虑到信号延迟,与受扰动的抑制作用,以及多种不同动态状态的响应能力等多种因素。
基于上述因素,要使机器人视觉伺服控制系统的建模与仿真更加准确,我们需考虑以下几方面内容:第一,机器人运动学的建模。
机器人的动力学和运动状态与时间有关,因此机器人的理论运动模型应包含时间变量。
我们在建模时,可以采用拉格朗日、牛顿-欧拉等方法来建立机器人的运动学模型。
此外,我们还可以利用仿真软件(如Matlab、Simulink 等)来建立机器人的运动学模型,完成机器人的动态仿真。
第二,机器人视觉系统的建模。
机器人视觉系统主要包含采集、图像处理和识别三个部分。
我们可以采用机器视觉的基本原理,利用数字图像处理技术对机器人所感知的图像进行处理和分析,提取出有用的信息或图像特征,在机器人运动的过程中实现对环境的感知和掌握。
第三,伺服系统的建模。
机器人的伺服系统主要包含比例控制、微分控制和积分控制三个部分。
我们在建模时,可采用系统辨识的方法,通过对控制器输入信号和输出信号的分析来建立伺服系统模型。
基于模糊PID复合控制交流伺服系统的研究传统的pid控制方法虽然能使系统获得良好的稳态精度,但系统的快速性和抗干扰能力及对系统参数摄动的鲁棒性都不够理想.传统的pid控制的交流伺服系统,整定pid参数时,很难做到动稳态性能都好。
只能兼顾动稳态,综合考虑,或有所侧重。
如果要求动态、稳态、抗扰性能都好就更难了。
模糊控制的交流伺服系统具有很大的灵活性,提供了一种提高交流伺服系统的跟随和抗扰性能的好方法,有力地提高了系统的鲁棒性。
但是,在模糊控制器的规则库中,全部规则是依据模糊专家知识所建立的,尽管很好,但也是过去经验的总结。
如果环境、对象出现了过去没遇过的情况,则知识库(数据库和规则库)显得呆板,而表现出不适应新情况的弊端。
传统控制理论经过几十年的发展和实践的检验,已经是一个较完善的理论体系。
但是它需要建立对象的数学模型。
当对象的数学模型具有不确定性时,给设计带来很大困难,或者是无法设计。
即当被控对象的模型具有不确定性、非线性,系统运行的状态和环境在较大范围内变化,系统的动静态指标要求较高,系统要达到的目标不止一个且具有复杂性,这种情况下应该采用智能控制,而传统的控制理论设计方法在这里不能胜任。
但是只用单一的智能控制方法也不会使系统具有完善的功能和期望的性能。
为了使系统具有更完善的功能和更理想的性能,应采用智能控制理论的定性推理控制策略与传统控制理论的定量计算控制策略的结合。
为此,把现代控制理论应用于伺服系统是为了使系统具备更强的鲁棒性和更为优良的动、静态性能.近年来,优良的复合控制在交流伺服系统中的应用展示了其良好的前景.将模糊控制技术和传统的pid控制相结合,能够有效地解决模糊控制存在稳态误差的缺陷.目前较为广泛的是模糊控制与pid控制的串联或者模糊控制与pid控制相并联.但是参数固定的pid控制又一定程度上给系统带来了动态与稳态之间的矛盾,模糊控制的优势没有得到完全体现.本文提出的模糊自校正控制器使pid调节器参数跟随系统误差变化而动态变化,从而具备了模糊控制较强鲁棒性和pid控制削弱稳态误差的功能.模糊pid控制器的构成与工作模糊pid控制器的构成将模糊逻辑控制器与pid控制器结合起来.模糊逻辑控制器动态性能、抗扰性能高,pid控制器稳态精度高,取两者的优点构成模糊(flcr)、pid复合控制的交流伺服系统(如图所示)。
基于图像的机器人视觉伺服系统研究班级:自121姓名:成佳宇学号:3120413006基于图像的机器人视觉伺服系统摘要本文采用基于图像的眼在手(eye in hand)视觉伺服结构,通过计算图像雅克比矩阵实现机械手的定位任务。
本文采用应用最广泛的机器人工具箱(Robotics Toolbox for Matlab),在该工具箱的基础上,运用Sub-system实现Matlab和Simulink的有机结合,建立基于图像反馈的六自由度PUMA560机器人视觉伺服系统Simulink模型,仿真验证该模型的有效性。
关键字:puma560机器人;视觉伺服;图像的雅可比矩阵Abstract:In this paper,we use Image-based visual servoing control system, via image jacobin matrix function the positioning of the manipulator by calculation task. on the basis of Robotics Toolbox for Matlab, and using Sub - system to realize the organic combination of Matlab and Simulink, based on the image feedback Simulink model of six degrees of freedom PUMA560 robot visual servoing system, the simulation verify the validity of the model.Keyword:PUMA560robot;IBVS;Image jacobin引言:机器人视觉伺服己成为机器人领域重要的研究内容之一,但是机器人视觉伺服系统是一个十分复杂的非线性系统。
基于模糊控制的机器人视觉伺服控制平振宇;王付兵;黄荣昌【摘要】机器人视觉伺服控制是当今机器人研完领.域的热点之一,以往的各种传统控制方法均是建立在被控对象精确模型的基础上,然而随着系统复杂程度的提高,将难以建立系统的精确数学模型.模糊控制直接依据人类专家的控制经验进行设计,其设计不依赖于被控对象的模型,机器人视觉伺服系统就是难以建立精确据学模型,为此利用模糊控制来克别L机器人视觉伺服系统的复杂性、强耦合性、不确定性和非线性因素的影响,实验结果表明,利用模糊控制可以使机器人视觉伺服控制达到较好控制效果.【期刊名称】《科技资讯》【年(卷),期】2015(013)035【总页数】5页(P72-76)【关键词】模糊控制;机器人;视觉伺服系统【作者】平振宇;王付兵;黄荣昌【作者单位】安徽理工大学电气与信息工程学院安徽淮南232001;安徽理工大学电气与信息工程学院安徽淮南232001;安徽理工大学电气与信息工程学院安徽淮南232001【正文语种】中文【中图分类】TP242.3随着计算机技术和摄像设备的发展,机器人视觉伺服系统的技术问题吸引了众多研究人员的注意。
视觉是一个复杂的感官,视觉信息包含着大量的数据,规律难寻,用传统的数学建模的方法不仅模型难以建立、控制问题的算法复杂,最主要的缺点是执行任务效率差,鲁棒性弱,需要考虑诸多外部及自身扰动因素影响,就比如在成像过程中会受到多种因素的影响(如摄像机的精度、光照强度、硬件传输过程中的噪声等),使得视觉信息中不可避免地带有噪声,增加了图像处理的难度。
目前通用的摄像机采样速率不高,而且传输有大量数据的视觉信息需要占用较多的时间,成像过程存在非线性等等。
为此用基于模糊控制的方法来解决上述问题,模糊控制是使用语言的方法,不需要过程的精确模型,比如生活中一个有经验的司机可以把车很好停在一个指定的区域内,在他看来在某一方位停得差不多就可以了,进而总体把车停得很好。
同时模糊控制有较强的容错能力、操作人员易于通过人的自然语言进行人机界面联系。
面向溺水救援机器人平稳跟踪的模糊比例微分控制视觉伺服方案郭英;厉广伟;刘宗尚;MOUNZEO Breit Hilley;李金屏【期刊名称】《济南大学学报(自然科学版)》【年(卷),期】2024(38)2【摘要】针对溺水救援机器人的平稳跟踪需求,提出一种基于模糊比例微分控制的视觉伺服方案,通过场馆顶部安装的俯视摄像头获取机器人的坐标位置,使用虚拟导航线设计动态行走路径,计算偏移方向、偏移角并制定转弯规则;利用三角隶属度函数制定模糊比例、微分控制规则表,根据2种规则表中的比例、微分系数分别控制机器人的偏移角、距离偏移量及其变化率,实现机器人的跟踪与避障的平稳性调整;机器人采用核相关滤波跟踪算法对溺水人员进行跟踪,在溺水人员位置变化时调整运动方向,依靠实时、稳定的声呐信息设置偏移角,实现避障功能;对所提出的方案在先锋P3DX型机器人上进行实验验证。
结果表明:机器人能及时应对目标变化,没有跟错、跟丢现象;在不同工况时的横滚角均小于1°,避障率达到100%,能够快速、稳定、准确地到达目标位置,达到溺水救援机器人的前期应用要求。
【总页数】7页(P227-233)【作者】郭英;厉广伟;刘宗尚;MOUNZEO Breit Hilley;李金屏【作者单位】济南大学信息科学与工程学院;济南大学山东省网络环境智能计算技术重点实验室;济南大学“信息处理与认知计算”山东省高校重点实验室;济南大学自动化与电气工程学院【正文语种】中文【中图分类】TP391.4【相关文献】1.基于粒子群优化的伺服系统比例积分微分控制器设计方法2.移动机器人路径跟踪模糊整定的比例微分控制3.基于图像视觉伺服的模糊比例积分微分控制系统4.伺服电机的预测控制与比例-积分-微分控制5.执行增强比例、积分和微分控制器的工具及其在电动-液压伺服应用中的用法因版权原因,仅展示原文概要,查看原文内容请购买。
基于模糊PID控制的望远镜伺服控制系统
翟园林;王建立;孟浩然;邓永停;苏燕芹
【期刊名称】《电子测量技术》
【年(卷),期】2012(35)3
【摘要】为了满足某种望远镜传递函数时变、速度精度要求高、位置定点时间长的控制要求,在分析经典PID的基础上,提出了一种模糊控制方案。
通过构造模糊控制规则,模糊PID控制器能够根据误差和误差变化对控制器的比例、积分增益进行实时的调整。
针对某望远镜模型,仿真验证了模糊PID控制与经典PID的控制性能,并在该望远镜上实验验证了速度控制及位置定点实验,速度为138.8°/s时最大稳态误差为0.4°/s,位置定点最大误差为0.0002°。
仿真结果和实验结果均表明:模糊PID控制能满足该望远镜的观测要求。
【总页数】5页(P11-15)
【关键词】模糊PID控制;望远镜;速度控制;位置定点
【作者】翟园林;王建立;孟浩然;邓永停;苏燕芹
【作者单位】中国科学院长春光学精密机械与物理研究所;中国科学院研究生院【正文语种】中文
【中图分类】TP271.4
【相关文献】
1.基于模糊PID控制的张力位置闭环伺服控制系统的研究 [J], 徐东亮;廖佳涛
2.基于模糊PID控制的新型伺服液压机位置控制系统研究 [J], 韩江;黄迪淼;夏链;
李贵闪
3.基于模糊PID控制的电液振动台伺服控制系统 [J], 施巍;贾文超;杨光;陈刚
4.基于模糊-PID控制的水冲洗机器人液压伺服控制系统 [J], 郭祥洋;鲁守银;高鹏;刘存根;胡涛
5.基于模糊PID控制方式的焊枪伺服控制系统设计 [J], 王珑;张嘉;贾庆功
因版权原因,仅展示原文概要,查看原文内容请购买。
基于图像视觉伺服的模糊比例积分微分控制系统摘要:针对传统比例积分微分(PID)参数难整定、控制性能不理想等问题,将模糊控制理论与PID控制器相结合,构成模糊PID控制器。
采用EyetoHand视觉模型,引入图像视觉伺服机制,通过图像获取误差信号来实现对PID控制器三个参数Kp、Ti和Td的实时在线自适应调整。
最后在以PC机、CompactRIO、NI9401、互补金属氧化物半导体(CMOS)摄像头、电机驱动器及无刷直流(DC)电机组成的打孔机视觉伺服运动控制系统上完成了实验。
结果表明,基于图像的视觉伺服模糊PID控制器相对于传统PID控制器响应速度提高了60%,超调量降低了80%,鲁棒性也更好;不仅能提高孔的定位精度,还能边加工边检测。
关键词:视觉伺服;模糊比例积分微分控制器;EyetoHand视觉模型;CompactRIO;CMOS摄像头;无刷直流电机中图分类号:TP273.4文献标志码:AAbstract:In view of the hard parameter tuning and unsatisfactory control performance,a fuzzyProportion Integration Differentiation (fuzzyPID)controller whichcombined Proportion Integration Differentiation (PID)controller with the fuzzy control theory was proposed. The control system applied EyetoHand visual model,introduced visual servo mechanism,and realized realtime,online and adaptive adjustment for three parameters Kp,Ti and Td of the PID controller by getting errors in image. The experiment was performed on punching machine visual servo motion control system which composes of PC,compactRIO,NI9401,Complementary Metal Oxide Semiconductor (CMOS)camera,motor driver and brushless Direct Current (DC)motor. The results show that,compared with traditional PID controller,the speed of response of the fuzzyPID controller based on image visual servo is increased by 60%,the overshoot is reduced by 80%,and it has better robustness. It can not only improve the positioning accuracy of hole,but also process and detect holes nearly at the same time.英文关键词Key words:visual servo;fuzzyProportion Integration Differentiation (fuzzyPID)controller;EyetoHand visual model;CompactRIO;Complementary Metal Oxide Semiconductor (CMOS)camera;brushless Direct Current (DC)motor0 引言电动机在工农业生产、家用电器,航空航天等领域得到了广泛应用。
传统的比例积分微分(Proportion Integration Differentiation,PID)控制算法只有在非时变系统模型参数下才可能获得较好的控制效果。
实际上由于电动机是一个强耦合的非线性被控对象,容易受到各种内外因素干扰而引起参数的变化,从而导致控制效果不理想。
由于不能在线调整参数导致自适应能力不强。
对此,文献[1-3]分别设计了基于径向基函数(Radial Basis Function,RBF)神经网络、模糊控制和模糊神经网络的PID控制器,但对于时变的被控对象,系统鲁棒性还有待提高。
文献[4]对基于图像视觉伺服的自动导引车辆(Automatic Guided Vehicle,AGV)动力学控制作了研究,文献[5]设计了一种基于图像视觉伺服的飞行器控制系统,但都没有与智能控制结合起来,系统的智能化水平有待提高。
另外,文献[6]研究了一种基于无标定显微视觉伺服的零件微装配技术;文献[7]对视觉系统在超声波打孔机中的应用作了理论探讨;文献[8]搭建了一个基于视觉的打孔机运动控制系统,但缺少理论上的研究。
当目标及其位姿均固定时,传统的打孔机通过编程可以很好实现,但在目标位姿经常发生变化的情况下通过编程是无法实现的。
针对以上不足,本文提出了一种基于图像视觉伺服的模糊PID(fuzzy PID)控制系统,并通过实验对其控制性能进行验证。
1 视觉伺服与fuzzyPID控制器视觉伺服也称为视觉反馈,是指通过视觉为运动系统的执行机构提供闭环位置控制。
视觉伺服系统根据反馈信号的不同类型可以分为基于位置的视觉伺服(Position Based Visual Servo,PBVS)和基于图像的视觉伺服(Image Based Visual Servo,IBVS)[9]。
根据视觉模型是否固定分为EyetoHand视觉模型和EyeinHand视觉模型。
基于位置的视觉伺服(3D视觉伺服)的误差信号定义在3D笛卡儿坐标系中,它对摄像机标定误差和用于目标位置估计的3D 模型误差非常敏感。
而基于图像的视觉伺服(又称2D视觉伺服)的误差信号定义在图像特征空间,由图像特征信息直接控制运动系统。
后者相对于前者的计算复杂小,鲁棒性强,系统实时性也更容易保证。
另外,相对于传统传感器而言,基于图像的视觉伺服在机器人控制中也具有明显优势:更高的灵活性、更高的精度,对机器人标定误差具有更强的鲁棒性等[10],因此受到广泛关注。
智能控制是在无人干预的情况下能自主地驱动智能机器实现控制目标的自动控制技术。
模糊控制是一种相对于比较成熟的智能控制方法,近年来受到了众多研究者的重视[11-13]。
本文拟将模糊控制理论应用到PID控制器中,以实现对PID控制器增益参数Kp、Ti和Td的实时在线自适应调整。
通过这种方式不断自动调整各个参数的大小来获得最佳的系统响应,从而增强控制器在复杂环境下的适应能力。
2 基于图像的视觉伺服fuzzyPID控制系统的构建与实现图像视觉伺服fuzzyPID控制器的设计为了改善传统PID控制器在控制性能上的不足(如动态性能相对较差、恢复时间长、超调量大以及参数整定困难等[14]),提高系统的鲁棒性和适应性,本文拟利用LabVIEW 软件及其两个开发工具包:Vision and Motion和PID and Fuzzy Logic Toolkit设计一个基于图像视觉伺服的fuzzyPID 控制器,并在硬件平台上验证其伺服控制的有效性。
其原理简述如下:通过摄像头不断采集图像,经处理分析后定位目标在图像坐标系中的像素位置;将此值传递至运动控制循环,经过误差比较后控制器发送控制指令对电机的运行状态(包括正转、反转、停转、加速、减速)进行实时自适应控制。
工作台X运动方向的程序执行流程如图1所示,Y方向类似。
2.1 软件开发2.1.1 软件开发平台LabVIEW是一种图形化的编程语言,具有无需编写文本代码、良好的人机交互性、易学易用等优势。
Vision and Motion工具包可方便地构建完整的视觉软件系统,包括图像采集、图像处理和图像分析等。
PID and Fuzzy Logic Toolkit 工具包是一种专门用于PID和模糊控制器设计的开发模块。
2.1.2 视觉系统软件开发视觉系统是整个视觉伺服fuzzyPID控制系统信息获取的关键环节,其性能的好坏将直接影响整个系统的运行效能。
本文基于互补金属氧化物半导体(Complementary Metal Oxide Semiconductor,CMOS)工业相机设计了一个图像采集、处理和分析软件。
需要说明的是,它并不是一成不变的,需要根据环境作出相应的调整,以获得最佳的控制效果。
2.1.3 fuzzyPID控制器的设计本文在LabVIEW2011专业开发版和附带的PID and Fuzzy Logic Toolkit工具包上完成。
这里以X方向的运动控制来说明整个设计流程。
基于图像视觉伺服的fuzzyPID控制系统结构如图2所示。
1)确定输入输出变量及其论域。
输入变量是像素距离,定义为S,单位为pixel。
它表示目标中心点X方向坐标,根据先期整定经验设定其论域范围为S=0~36(取实际像素距离的1/10)。
模糊语言定义为“近”“中近”“中”“中远”“远”5个级别,分别对应于5个集合。
输出变量是PID增益的三个参数Kp、Ti、Td。
根据控制效果的需要进行多次实验后确定三个参数的论域范围分别是:Kp=5~25,模糊语言定义为:“Kp小”“Kp中”“Kp 大”;Ti=0.01~0.1min,模糊语言定义为:“Ti小”“Ti中”“Ti 大”;Td=0.0005~0.005min,模糊语言定义为:“Td小”“Td 中”“Td大”。
各有3个集合与之对应。
2)隶属度函数与输入输出空间的模糊分割。
利用隶属度函数将输入输出空间作模糊分割得到对应的模糊集合。
隶属度函数有多种形状,常用的有三角形、梯形和高斯型。
本文为了计算简单,在满足要求的前提下选择三角形和高斯型隶属度函数。
利用隶属度函数将输入输出空间作如图3的模糊分割。
4)模糊推理及去模糊化。
模糊推理又称近似推理,是从不精确的前提集合IF中得出可能的不精确结论THEN的推理过程。
此处采用的模糊推理方法为最大最小(MaxMin)法。
经过模糊推理得到的结论仍然是模糊的,不能作为控制量输出,需要通过一种去模糊化算法得到精确的数值。
LabVIEW中提供了多种去模糊化方法,常用的是面积重心(Center of Area)法。
该方法对模糊输出量中各元素及其对应的隶属度求加权平均值后作为输出结果。