东北大学现代信号处理新方法郎俊大作业
- 格式:pdf
- 大小:492.83 KB
- 文档页数:12
《现代信号处理》大作业姓名:王成志学号:1140349078一. L D 迭代算法的matlab 实现1.1 Levinson-Durbin 算法介绍功率谱估计大致可以分为经典谱估计和现代功率谱估计,经典谱估计方法存在着以下三点缺陷:(1)数据加窗或自相关加窗,都隐含着假定在窗外未观测到的数据或自相关系数为零,该假设不切实际。
(2)要性能好往往需要较长的数据,但实际数据长度有限(3)窗函数容易造成谱的模糊。
采用AR 模型的现代谱估计方法可以克服这些不足。
其中LD 递推算法可以在计算机上方便实现。
LD 递推算法具体计算步骤如下:(1) Yule-Walker 方程的矩阵形式(1)所示:⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--+-----001)0()2()1()()1()1()0()1()()2()1()0(2,1,σk k k xx xx xx xx x xx xx xx xx xx xx xx a a r k r k r k r k r r r r k r r r r 系数矩阵xx Hxx R R =,为Hermitian 矩阵,对角线上元素相同,即为Topliez 矩阵。
(2) P-1阶Yule-Walker 方程为:21111(0)(1)(1),1(1)(0)(2)0,1(1)(2)(0)0x x x p p x x x p x x x R R R p a R R R p a p R p R p R σ-----⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥-⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥---⎢⎥⎣⎦⎣⎦⎣⎦ 其中,2211{()}p p E e l σ--=为误差功率。
写成联立方程:2111,0,0()0,1,,1p pp k xk m a R m k m p σ---=⎧=-=⎨=-⎩∑ 取共轭得:21**11,0,0()0,1,,1p pp kxk m aR m k m p σ---=⎧=-=⎨=-⎩∑变量替换,并利用*()()x x R l R l =得:21*11,10,1()0,0,,2p pp p kx k m p aR m k m p σ-----=⎧=--=⎨=-⎩∑ 表示成矩阵:*1*1210(0)(1)(1),10(1)(0)(2),2(1)(2)(0)1x x x p x x x p p x x x R R R p a p R R R p a p R p R p R σ-----⎡⎤⎡⎤⎡⎤-⎢⎥⎢⎥⎢⎥--⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥--⎢⎥⎣⎦⎣⎦⎣⎦ 求解得:*.1,1,,0,,p k p k p p p k a a K a k p ---=+=22*1p p p p K σσ-=+∆ 2210p p p K σ-=∆+,p p p K a =222*22111[][1]p p p p p p p K K K σσσσ---=+-=-(3) 当k=1时,即一阶递推为:⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡-01)0()1()1()0(211,1σa R R R R x x x x求解可得:)1()0()0()1( ,11,1211,10,1x x x x R a R R R a a +=-==σ(4) 对于2≥p 时,递推为:10,≡p a , *,1,1,k p p p k p k p aK a a ---+=, ]1[2212p p p K -=-σσ 21,-∆-==p pp p p a K σ∑-=--+=∆11,1)()(p k x kp x p k p R ap R矩阵R x 已知,可得到各阶AR 模型系数为:)0())1(1( ,)0()1()1(2111xx xx xx r a r r a -=-=ρ11111)()()()(--=--∑-+-=∆-=k k l xx k xx k kk l k r l a k r k a ρρ1,,2,1)()()()(*11-=-+=--k i i k a k a i a i a k k k k12))(1(--=k k k k a ρρ1.2实验结果(1) 输入p=3,rr = [70,60,50,40] 时,求得AR 模型估计参数为:a =1.0000 -0.8571 0 0 1.0000 -0.5275 -0.3846 0 1.0000 -0.7572 -0.6996 0.5972 各阶求得的方差为:sigma = 18.5714 15.8242 10.18013阶时,a 3 (1)= -0.7572 a 3 (2)= -0.6996 a 3 (3)= -0.5972(2) 输入p=5,rr = [30,45,26,33,47,43]时,AR 模型估计参数为:a =1.0000 -1.5000 0 0 0 0 1.0000 0.2800 -1.1867 0 0 0 1.0000 0.8227 -1.3147 -0.4573 0 0 1.0000 1.9708 1.9858 -2.5226 -2.5105 0 1.0000 1.0869 1.0977 -1.8235 -1.8166 0.3521 各阶求得的方差为: sigma =37.5000 15.3067 12.1054 64.1881 56.23165阶时, a 5 (1)= 1.0869 a 5(2)= 1.0977 a 5(3)= -1.8235 a 5(4)= -1.8166 a 5(5)= 0.3521二. 一维平稳信号由两个高斯信号叠加而成12241122()()[exp(())exp(())]22z t t t j t t t j t αααωωπ=--++--+,其中12,t t >12ωω>,分别求出()z t 的WV 分布及其模糊函数,画出二者的波形图,指出并分析其信号项和交叉项。
第一章 绪论1、 试举例说明信号与信息这两个概念的区别与联系。
信息反映了一个物理系统的状态或特性,是自然界、人类社会和人类思维活动中普遍存在的物质和事物的属性。
信号是传载信息的物理量是信息的表现形式,如文字、语言、图像等。
如人们常用qq 聊天,即是用文字形式的信号将所要表达的信息传递给别人。
2、 什么是信号的正交分解?如何理解正交分解在机械故障诊断中的重要价值?P9正交函数的定义信号的正交分解如傅里叶变换、小波分解等,即将信号分解成多个独立的相互正交的信号的叠加。
从而将信号独立的分解到不同空间中去,通常指滤波器频域内正交以便于故障分析和故障特征的提取。
傅里叶变换将信号分解成各个正交的傅里叶级数,将信号从时域转换到频域从而得到信号中的各个信号的频率。
正交小波变换能够将任意信号(平稳或非平稳)分解到各自独立的频带中;正交性保证了这些独立频带中状态信息无冗余、无疏漏,排除了干扰,浓缩了了动态分析与监测诊断的信息。
3、 为什么要从内积变换的角度来认识常见的几种信号处理方法?如何选择合适的信号处理方法?在信号处理各种运算中内积变换发挥了重要作用。
内积变换可视为信号与基函数关系紧密程度或相似性的一种度量。
对于平稳信号,是利用傅里叶变换将信号从时域变为频域函数实现的方式是信号函数x (t )与基函数i t e ω 通过内积运算。
匹配出信号x (t )中圆频率为w 的正弦波.而非平稳信号一般会用快速傅里叶变换、离散小波变换、连续小波变换等这些小波变换的内积变换内积运算旨在探求信号x (t )中包含与小波基函数最相关或最相似的分量。
“特征波形基函数信号分解”旨在灵活运用小波基函数 去更好地处理信号、提取故障特征。
用特定的基函数分解信号是为了获得具有不同物理意义的分类信息。
不同类型的机械故障会在动态信号中反应出不同的特征波形,如旋转机械失衡振动的波形与正弦波形有关,内燃机爆燃振动波形是具有钟形包络的高频波;齿轮轴承等机械零部件出现剥落。
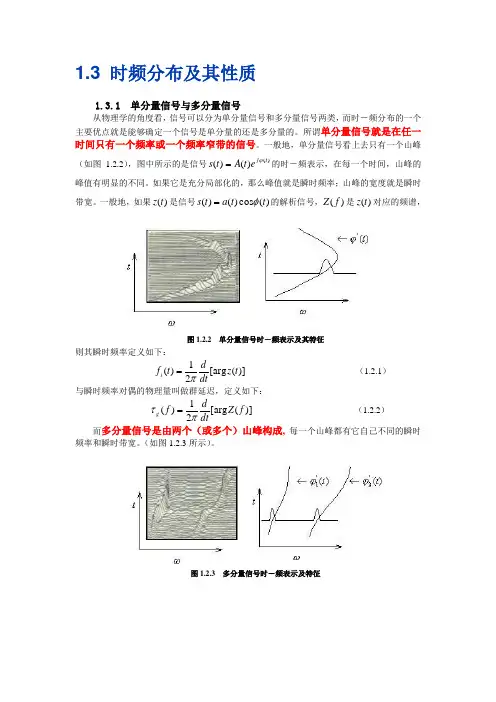
1.3 时频分布及其性质1.3.1 单分量信号与多分量信号从物理学的角度看,信号可以分为单分量信号和多分量信号两类,而时-频分布的一个主要优点就是能够确定一个信号是单分量的还是多分量的。
所谓单分量信号就是在任一时间只有一个频率或一个频率窄带的信号。
一般地,单分量信号看上去只有一个山峰(如图 1.2.2),图中所示的是信号)()()(t j e t A t s ϕ=的时-频表示,在每一个时间,山峰的峰值有明显的不同。
如果它是充分局部化的,那么峰值就是瞬时频率;山峰的宽度就是瞬时带宽。
一般地,如果)(t z 是信号)(cos )()(t t a t s φ=的解析信号,)(f Z 是)(t z 对应的频谱,图1.2.2 单分量信号时-频表示及其特征则其瞬时频率定义如下:)]([arg 21)(t z dtdt f i π=(1.2.1) 与瞬时频率对偶的物理量叫做群延迟,定义如下: )]([arg 21)(f Z dtdf g πτ=(1.2.2) 而多分量信号是由两个(或多个)山峰构成, 每一个山峰都有它自己不同的瞬时频率和瞬时带宽。
(如图1.2.3所示)。
图1.2.3 多分量信号时-频表示及特征1.3.2 时-频分布定义Fourier 变换的另一种形式⎰∞∞--=dt e t s f S ft j π2)()(⎰∞∞-=dfe f S t s tf j π2)()(Cohen 指出,尽管信号)(t z 的时-频分布有许多形式,但不同的时-频分布只是体现在积分变换核的函数形式上,而对于时-频分布各种性质的要求则反映在对核函数的约束条件上,因此它可以用一个统一形式来表示,通常把它叫做Cohen 类时-频分布,连续时间信号)(t z ()(t z 为连续时间信号)(t s 的解析信号)的Cohen 类时-频分布定义为ττφτττπdudvd e v u z u z f t P vu f vt j )(2*),()21()21(),(-+-∞∞-∞∞-∞∞--+=⎰⎰⎰(1.3.1) 式中),(v τφ称为核函数。
现代信号处理作业现代信号处理课程作业1.做⼀个⽹络检索,简述现代信号处理技术的主要特征和技术特点,并阐述信号处理在实际⼯程中的应⽤情况代信号处理技术的主要特征和技术特点:1)精度⾼:在模拟系统的电路中,元器件精度要达到10-3以上已经不容易了,⽽数字系统17位字长可以达到10-5的精度,这是很平常的?例如,基于离散傅⾥叶变换的数字式频谱分析仪,其幅值精度和频率分辨率均远远⾼于模拟频谱分析仪?2) 灵活性强:数字信号处理采⽤了专⽤或通⽤的数字系统,其性能取决于运算程序和乘法器的各系数,这些均存储在数字系统中,只要改变运算程序或系数,即可改变系统的特性参数,⽐改变模拟系统⽅便得多?3) 可以实现模拟系统很难达到的指标或特性:例如:有限长单位脉冲响应数字滤波器可以实现严格的线性相位;在数字信号处理中可以将信号存储起来,⽤延迟的⽅法实现⾮因果系统,从⽽提⾼了系统的性能指标;数据压缩⽅法可以⼤⼤地减少信息传输中的信道容量?4)可以实现多维信号处理:利⽤庞⼤的存储单元,可以存储⼆维的图像信号或多维的阵列信号,实现⼆维或多维的滤波及谱分析等?信号处理在实际⼯程中的应⽤情况:数字信号处理是利⽤计算机或专⽤计算机或专⽤处理设备,以数据形式对信号进⾏采集,变换,滤波,估值,增强,压缩,识别等处理,以得到符合⼈们需要的信号形式?数字信号处理是以众多科学为理论基础的,他所涉及的范围及其⼴泛?DSP 技术应⽤到我们的⽣活的每⼀个⾓落,从军⽤到民⽤,从航空航天到⽣产⽣活,都越来越多地使⽤DSP. DSP技术在航空⽅⾯,主要⽤于雷达和声纳信号处理;在通信⽅⾯,主要⽤于移动电话,IP电话,ADSL和HFC的信号传输;在控制⽅⾯,主要⽤于电机控制,光驱和硬盘驱动器;在测试/测量⽅⾯,主要⽤于虚拟仪器,⾃动测试系统,医疗诊断等;在电⼦娱乐⽅⾯,主要⽤于⾼清晰度电视,机顶盒,家庭影院,DVD 等应⽤;还有数字相机,⽹络相机等等都应⽤了SP技术?同时,SOC芯⽚系统,⽆线应⽤,嵌⼊式DSP都是未来DSP的发展⽅向和趋势?可以说,没有DSP就没有对互联⽹的访问,也不会有多媒体,也没有⽆线通信?因此DSP仍将是整个半导体⼯业的技术驱动⼒?现在,DSP应⽤领域不断拓宽,其涵盖⾯包括宽带Internet接⼊业务,下⼀代⽆线通信系统的发展,数字消费电⼦市场,汽车电⼦市场的发展等诸多多⽅⾯?现代数字信号处理器是执⾏⾼速数字信号系统的IC电路,它恰好适合多媒体信息化社会需求,迅速发展壮⼤?如今,世界电⼦器件市场上,各种各样的DSP器件已相当丰富?⼤⼤⼩⼩封装形式的DSP器件,已⼴泛⽤于各种产品的⽣产领域,⽽且DSP的应⽤领域仍在不断的扩⼤,发展速度异常?2?简述信号的频率分析技术及其应⽤,阐述实现精细频率分析的实现⽅法?考虑到数字信号分析中,虽然提⾼信号的采样频率可以改善信号分析的频率分辨率,但是提⾼信号的采样频率通常需要付出额外的硬件代价,往往受制于可实现性与成本问题⽽难以实现?因此,就需要使⽤频谱细化技术在尽可能低的采样频率下提⾼数字信号分析的频率分辨率的措施?频谱细化的基本思路是对信号频谱中的某⼀频段进⾏局部放⼤,也即在某⼀频率附近局部增加谱线密度,实现选带频段分析?频谱细化技术在⽣产实践和科学研究中获得了⽇益⼴泛的应⽤?例如,齿轮箱的故障诊断要求准确分辨齿轮各阶啮合振动的主频和边频等,其频谱图上的频率间隔很细,但频率分布⼜较宽,为了识别谱图的细微结构,就必须对信号进⾏细化分析;直升机?坦克?巡航导弹的声⾳具有显著的⾮平稳性,为了得到准确的时延量,信号的取样不能太长,⽽FFT计算的频谱存在栅栏效应?因此必须采⽤有效的⽅法对频谱进⾏细化,这样才能保证⾜够的相关计算精度;在⽆线电通信信号和其他的实际⼯程信号的分析中,为了获取更⾼的测量精度和实时检测能⼒,需要对信号频谱进⾏细化分析,以提供有⽤信息?因此对频谱细化技术的研究受到普遍重视,也是当前信号处理技术研究中的⼀个⼗分活跃的课题?常见的经典⽅法有:复调制细化法?Chirp-Z变换?FFT+FT细化法?DFT补零法等很多⽅法?复调制细化法:⼜称为选带频率细化选带频谱分析,是20世纪70年代发展起来的?其传统的分析步骤为:移频(复调制)低通滤波器重抽样--FFT及谱分析频率成分调整,因其物理概念⾮常明确,所以⼀直沿⽤⾄今?FFT+FT细化法:该⽅法的原理本质是将连续傅⾥叶变换经过将积分化成求和?时域离散化和时域截断为有限长三个步骤变换得到时间离散?频率连续的特殊傅⾥叶变换形式?FFT+FT连续细化分析傅⾥叶变换法先⽤FFT做全景谱,再对指定的⼀个频率区间进⾏细化计算:先确定频率分辨率,再确定计算频率序列,最后⽤FT连续谱分析⽅法进⾏实部和虚部计算,合成幅值谱和相位谱? Chirp-Z变换:最早提出于1969年,CZT是⼀种在Z平⾯上沿着螺旋线轨道计算有限时宽的Z变换⽅法?基本原理是在折叠频率范围内任意选择起始频率和频率分辨率在这有限带宽⾥对样本信号进⾏Z变换这与频谱校正⽅法中的FFT + FT 连续细化分析傅⾥叶变换法的基本原理是⼀样的?3、通过⽹络检索,对弱信号检测技术进⾏调研,分析⼀下现代弱信号检测的⽅法微弱信号检测(WeakSignalDetection)是⼀门新兴的技术学科,应⽤范围遍及光?电?磁?声?热?⽣物?⼒学?地质?环保?医学?激光?材料等领域?其仪器已成为现代科学研究中不可缺少的设备?微弱信号检测技术是采⽤电⼦学?信息论?计算机及物理学的⽅法,分析噪声产⽣的原因和规律,研究被测信号的特点与相关性,检测被噪声淹没的微弱有⽤信号?微弱信号检测的⽬的是从强噪声中提取有⽤信号,或⽤⼀些新技术和新⽅法来提⾼检测系统输出信号的信躁⽐?信号处理系统的信躁⽐改善等于输⼊(⽩)躁声带宽与系统的躁声等效带宽之⽐?因此,减少系统的躁声等效宽度便可以提⾼系统的输出信躁⽐?对于信躁⽐⼩于1的被躁声淹没的信号,只要信号处理系统的躁声等效带宽做得很⼩,就可以将信号(或信号携带的信息)从躁声中提取出来,这就是通常的微弱信号检测的指导思想之⼀?现代弱信号检测的⽅法和原理窄带滤波法: 使⽤窄带滤波器,滤掉宽带躁声只让窄带宽信号通过(仅有极少量窄带躁声通过)?窄带滤波法能减少躁声对有⽤信号的影响?滤除掉通频带以外躁声,提⾼信号的信躁⽐?但是,由于⼀般滤波器的中⼼频率不稳定,不能满⾜更⾼的滤除躁声的要求?双路消躁声法:由于信号与躁声性能完全不同,信号⼀般为⼀些变化规律已知的量,⽽躁声是⼀些随机量满⾜统计规律?当随机性的躁声从两路到达加法器时,极性正好相反,经过加法器相加后把躁声消掉?只有少数强躁声才通过阀值电路⽽产⽣本底计数,根据统计规律?本底计数时间较长时为恒定值?故可以先测出它,然后从总计数中把它减得到信号计数?这种⽅法只能检测到微弱的正弦信号是否存在,⽽不能复现信号波形?同步累积法:利⽤信号的重复性,躁声的随机性,对信号进⾏重复累积(⼏次),使SNIR提⾼,但需耗费时间?锁定接收法(频域分析法) :锁定检测法是利⽤互相关原理,使输⼊待测的周期信号与频率相同的参考相关器中实现互相关,从⽽将深埋在躁声中的周期信号携带的信息检测出来?相关检测法: 相关检测技术是应⽤信号周期性和噪声随机性的特点,通过⾃相关或互相关运算,达到去除躁声检测出信号的⼀种技术?由于信号和躁声是相互独⽴的过程,根据相关函数和互相关函数的定义,信号只与信号本⾝相关与躁声不相关??取样积分法:取样积分(或信号平均)法是将待测的重复信号逐点多次取样并进⾏同步积累,从⽽达到从噪声中恢复信号波形的⽅法?取样积分也采⽤同步相关检测的原理和⽅法,实现从噪声中提取信号,但它的参考信号只在窗⼝持续期间与被测信相关,每周相关时间很短,此外它的相移也是在很慢的变化?取样积分由单点取样积分与多点取样积分两种?4.利⽤MATLAB产⽣出⼀个线性调频信号(chirp信号),采样频率=8000Hz,持续时间1s,起始频率=500Hz,终⽌频率=1300Hz,给出其时域波形图,请利⽤短时FFT分析函数对数据进⾏时间-频率分析,观测频率随时间的变化情况分析结果:00.10.20.30.40.50.60.70.80.91-1-0.50.51时间t/s幅度线性调频信号Time F r e q u e n c y 线性调频信号的STFT 频谱图50010001500200025003000350015. 研究⼀下利⽤⾃相关实现含噪声的正弦信号检测⽅法,并利⽤MATLAB 进⾏验证:答:相关函数的应⽤很⼴,例如,噪声中信号的检测?信号中隐含周期性信号的检测,信号相关性的检测等?设信号)(n f 由正弦信号) (n x 加均值为零的⽩噪声)(n s 所组成,即)()()(n s n x n f +=;那么)(n f 的⾃相关为∑∞=++++=0)]()()][()([1)(n m n s m n x n s n x N m R=)()()()(m R m R m R m R ss sx xs xx +++其中)(m R xs 和)(m R sx 分别是正弦信号)(n x 和⽩噪声)(n s 的互相关?⽩噪声是随机的,和信号)(n x 应⽆相关性,所以)(m R xs 和)(m R sx 应趋近于零?⽩噪声)(n s 的⾃相关函数)(m R ss 主要在n=0处有值,当0||>n 时,衰减很快?由于)(n x 是周期函数,那么)(m R xx 将呈周期变化,从⽽揭⽰出隐含在)(m R xx 中的周期性?由于)(n x 总为有限长,所以这些峰值将是逐渐衰减的,且)(m R xx 的最⼤延迟应⼩于数据长度?01002003004005006007008009001000-4-224含噪声时域正弦信号01002003004005006007008009001000-0.500.5⾃相关检测出的正弦信号6. 简述⼩波滤波的原理,并利⽤MATLAB 中的⼩波⼯具进⾏⼀个⼩波滤波练习,给出计算结果,并进⾏分析答 :信号去噪是信号处理领域的⼀个经典问题,传统的去噪⽅法主要是线性滤波和⾮线性滤波,例如中值滤波和Wiener 滤波等?⼩波变换具有下列良好特性:①低熵性②多分辨率特性③去相关性④选基灵活性?⼩波在信号去噪领域已经取得越来越⼴泛的应⽤?阈值去噪的⽅法是⼀种较好的⼩波去噪法?阈值去噪⽅法的思想就是对⼩波分解后的个层系数中模⼤于和⼩于某阈值的系数进⾏处理,然后对处理完的⼩波系数再进⾏反变换,重构出经过去噪的信号?01002003004005006007008009001000-11原始信号01002003004005006007008009001000-22含噪信号01002003004005006007008009001000-202去噪后的信号。

时频分析摘要:随着信息传递速度的提高,信号处理技术要求也在不断提高。
从信号频域可以观测信号特点,但是对于自然中的非平稳信号,仅仅频域观测不能反映信号频率在时间轴上的变化,由此提出了时频分析技术,可以产生时间与频率的联合函数,方便观测信号频率在时间轴上的变化。
在现有的时频分析技术中较为常见的算法有短时傅里叶变换、WVD、线性调频小波等。
本文介绍了以上几种常见的算法和时频分析的相关应用。
关键词:信号处理非平稳信号时频分析一.整体概况在传统的信号处理领域,基于 Fourier 变换的信号频域表示及其能量的频域分布揭示了信号在频域的特征,它们在传统的信号分析与处理的发展史上发挥了极其重要的作用。
但是,Fourier 变换是一种整体变换,即对信号的表征要么完全在时域,要么完全在频域,作为频域表示的功率谱并不能告诉我们其中某种频率分量出现在什么时候及其变化情况。
然而,在许多实际应用场合,信号是非平稳的,其统计量(如相关函数、功率谱等)是时变函数。
这时,只了解信号在时域或频域的全局特性是远远不够的,最希望得到的乃是信号频谱随时间变化的情况。
为此,需要使用时间和频率的联合函数来表示信号,这种表示简称为信号的时频表示。
时频分析的主要研究对象是非平稳信号或时变信号,主要的任务是描述信号的频谱含量是怎样随时间变化的。
时频分析是当今信号处理领域的一个主要研究热点,它的研究始于20世纪40年代,为了得到信号的时变频谱特性,许多学者提出了各种形式的时频分布函数,从短时傅立叶变换到 Cohen 类,各类分布多达几十种。
如今时频分析已经得到了许多有价值的成果,这些成果已在工程、物理、天文学、化学、地球物理学、生物学、医学和数学等领域得到了广泛应用。
时频分析在信号处理领域显示出了巨大的潜力,吸引着越来越多的人去研究并利用它。
1.1基本思想时频分布让我们能够同时观察一个讯号在时域和频域上的相关资讯,而时频分析就是在分析时频分布。
传统上,我们常用傅里叶变换来观察一个讯号的频谱。

1.总结学过的滤波器设计方法,用matlab 仿真例子分析不同设计方法的滤波器的性能及适应场合。
答:1.1模拟低通滤波器的设计方法 1.1.1 Butterworth 滤波器设计步骤: ⑴.确定阶次N① Ωc 、Ωs 和As 求Butterworth DF 阶数N② Ωc 、Ωs 和Ω=Ωp()的衰减Ap 求Butterworth DF 阶数N③ Ωp 、Ωs 和Ω=Ωp 的衰减Ap和As 求Butterworth DF 阶数N3dB p Ω≠-/10/1022(/)101,(/)101p s A A N N p c s c ΩΩ=-ΩΩ=-则:⑵.用阶次N 确定 根据公式:在左半平面的极点即为的极点,因而1.1.2 切比雪夫低通滤波器设计步骤: ⑴.确定技术指标归一化: ⑵.根据技术指标求出滤波器阶数N 及:⑶.求出归一化系统函数 其中极点由下式求出:()a H s 1,2,2N()()a a H s H s -()a H s 2,,N p Ωp αs Ωs α/1p p p λ=ΩΩ=/s s p λ=ΩΩε0.12101δε=-p δα=或者由和S 直接查表得2.数字低通滤波器的设计步骤:〔1〕 确定数字低通滤波器的技术指标:通带截止频率pω、通带最大衰减系数pα、阻带截止频率ω、阻带最小衰减系数s α。
〔2〕将数字低通滤波器的技术指标转换成模拟低通滤波器的技术指标。
巴特沃斯:切比雪夫:N ()a H p /ss p λ=ΩΩ0.12101δε=-p δα=〔3〕把模拟滤波器变换成数字滤波器,即把模拟滤波器的系数)(S H 映射成数字滤波器的系统函数)(z H 。
实现系统传递函数s 域至z 域映射有脉冲响应不变法和双线性映射两种方法。
〔〕脉冲响应不变法。
按照技术要求设计一个模拟低通滤波器,得到模拟低通滤波器的传输函数()s H a 转换成数字低通滤波器的系统函数H(z)。
设模拟滤波器的传输函数为()s H a ,相应的单位冲激响应是()t h a ,()s H a =LT[()t h a ],LT[.]代表拉氏变换,对()t h a 进展等间隔采样,采样间隔为T ,得到()nT h a ,将h(n)= ()nT h a 作为数字滤波器的单位取样响应,那么数字滤波器的系统函数H(z)便是h(n)的Z 变换。
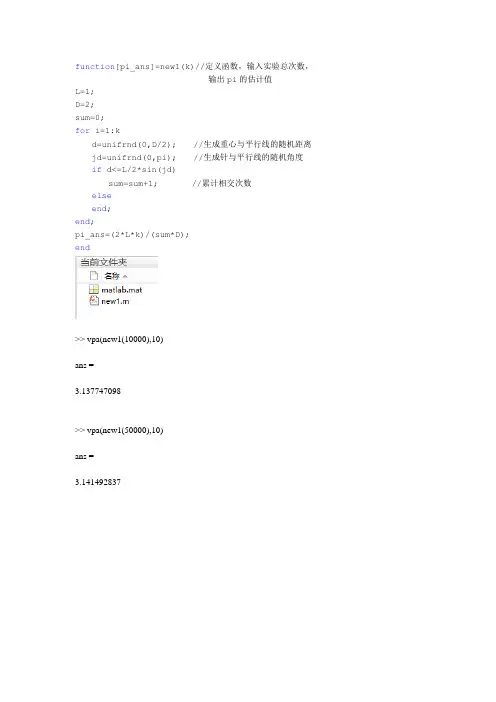
function[pi_ans]=new1(k)//定义函数,输入实验总次数,输出pi的估计值L=1;D=2;sum=0;for i=1:kd=unifrnd(0,D/2); //生成重心与平行线的随机距离 jd=unifrnd(0,pi); //生成针与平行线的随机角度if d<=L/2*sin(jd)sum=sum+1; //累计相交次数elseend;end;pi_ans=(2*L*k)/(sum*D);end>> vpa(new1(10000),10)ans =3.137747098>> vpa(new1(50000),10)ans =3.141492837Blackman 窗:旁瓣峰值幅度57,阻带最小衰减74 所设计滤波器特性: Fp=400 Fs=550FS=1000阻带衰减不小于60fp=400; fs=550; FS=1000;wc=(fp+fs)/(2*FS); //截止频率 width=2*pi*(fs-fp)/FS; //过渡带宽 Nf=ceil(11*pi/width);Nf=Nf+mod(Nf+1,2); //滤波器长度 newf=fir1(Nf-1,wc,'low',blackman(Nf)); //生成滤波器 [h1,w1]=freqz(newf,1);plot(w1/pi,20*log10(abs(h1))); //画其特性曲线 axis([0,1,-130,10]); grid;xlabel('归一化频率/p'); ylabel('幅度/dB');-120-100-80-60-40-20归一化频率/p幅度/d Bf1=300; f2=600;fs=2000; //采样频率 t=0:1/fs:1;ori=sin(2*pi*f1*t)+sin(2*pi*f2*t); plot(t,ori);axis([0.1,0.2,-2,2]); xlabel('时间/s'); ylabel('幅度');title('300hz 与600hz 合成时域信号');t=1:800ori_frq=fft(ori,800); //快速傅里叶变换 DB1=abs(ori_frq); //幅值 f=t*fs/800; //频率采样 plot(f(1:400),DB1(1:400)); xlabel('频率/hz'); ylabel('幅度');title('300hz 与600hz 频域合成信号');0.10.110.120.130.140.150.160.170.180.190.2时间/s幅度300hz 与600hz 合成时域信号50100150200250300350400450频率/hz幅度300hz 与600hz 频域合成信号lv_time=filter(newf,1,ori); //滤波 plot(t,lv_time); axis([0.1,0.2,-2,2]); xlabel('时间/s'); ylabel('幅度'); title('滤波后时域信号');t=1:800lv_frq=fft(lv_time,800); //频域滤波结果 DB2=abs(lv_frq); f2=t*fs/800;plot(f2(1:400),DB2(1:400)); xlabel('频率/hz'); ylabel('幅度'); title('滤波后频域信号');0.10.110.120.130.140.150.160.170.180.190.2时间/s幅度滤波后时域信号0100200300400500600700800900100050100150200250300350400频率/hz幅度滤波后频域信号[xt,fs2]=audioread('F:/Tim.wav'); data=xt(1:1000000);audiowrite('newtim.wav',data,fs2);datafft=fft(data); magX=abs(datafft); figure(1); plot(data); figure(2); plot(magX);012345678910x 105-0.8-0.6-0.4-0.200.20.40.60.81012345678910x 105100020003000400050006000TS=1/fs2; L=length(data);noise=0.1*randn(size(data)); //噪声方差0.1,呈正态分布 data_n=data+noise; t=1:800data_n_frq=fft(data_n,800); DB4=abs(data_n_frq); f=t*fs/800;plot(f(1:400),DB4(1:400)); figure(1); plot(data_n); figure(2); plot(data_n_frq);012345678910x 105-1-0.50.511.5-8-6-4-20246-8-6-4-202468fp=200000; fs=300000;FS=1000000; //改变滤波器 wc=(fp+fs)/(2*FS); width=2*pi*(fs-fp)/FS; Nf=ceil(11*pi/width); Nf=Nf+mod(Nf+1,2);newf=fir1(Nf-1,wc,'low',blackman(Nf)); [h1,w1]=freqz(newf,1);plot(w1/pi,20*log10(abs(h1))); axis([0,1,-130,10]); grid;xlabel('归一化频率/p'); ylabel('幅度/dB');-120-100-80-60-40-20归一化频率/p幅度/d Blv_audio=filter(newf,1,data_n); t=1:800lv_audio_frq=fft(lv_audio,800); DB5=abs(lv_audio_frq);f=t*fs/800;plot(f(1:400),DB5(1:400)); figure(1); plot(lv_audio); figure(2);plot(lv_audio_frq);012345678910x 105-0.8-0.6-0.4-0.200.20.40.60.81-6-4-20246-10-8-6-4-2246810allx㰰〴㤾π θsuma k l P a l **2*2==πfp=40;fs=60;FS=100;wc=(fp+fs)/(2*FS);width=2*pi*(fs-fp)/FS;Nf=ceil(11*pi/width);Nf=Nf+mod(Nf+1,2);newf=fir1(Nf-1,wc,'low',blackman(Nf));[h1,w1]=freqz(newf,1);plot(w1/pi,20*log10(abs(h1)));axis([0,1,-130,10]);grid;xlabel('归一化频率/p');ylabel('幅度/dB');00.10.20.30.40.50.60.70.80.91-120-100-80-60-40-20归一化频率/p 幅度/d Bfs=1000;f0=10;t0=0:1/fs:2;y0=0.3*sin(2*pi*f0*t0); //10hz 正弦信号figure(1);plot(t0,y0);axis([0,2,-0.4,0.4]);n0=10^(-5);noise0=sqrt(n0/2)*randn(size(t0));//高斯白噪声,方差为n0/2 figure(2);plot(t0,noise0);axis([0,2,-0.4,0.4]);y_n=y0+noise0;00.20.40.60.81 1.2 1.4 1.6 1.82-0.4-0.3-0.2-0.10.10.20.30.400.20.40.60.81 1.2 1.4 1.6 1.82-0.4-0.3-0.2-0.10.10.20.30.4fs=2000;t=1:800;y0_fft=fft(y0,800);DB10=abs(y0_fft);f=t*fs/800;figure(1);plot(f(1:400),DB10(1:400));axis([0,200,0,1]);y_n_fft=fft(y_n,800);DB11=abs(y_n_fft);f=t*fs/800;figure(2);plot(f(1:400),DB11(1:400));axis([0,500,0,1]);00.10.20.30.40.50.60.70.80.9105010015020025030035040045050000.10.20.30.40.50.60.70.80.91lv_gaosi=filter(newf,1,y_n);figure(1); //滤波后时域波形plot(t0,lv_gaosi);axis([0,2,-0.4,0.4]);fs=2000;t=1:800;lv_fft=fft(lv_gaosi,800);DB12=abs(lv_fft);f=t*fs/800;figure(2); //滤波后功率谱plot(f(1:400),DB12(1:400));axis([0,500,0,10]);00.20.40.60.81 1.2 1.4 1.6 1.82-0.4-0.3-0.2-0.10.10.20.30.4050100150200250300350400450500012345678910050100150200250300350400450500012345678910。
东北大学继续教育学院数字信号处理器原理及应用X 试卷(作业考核线上2) A 卷(共 4 页)一、判断题(2分/题,共20分)1.数字信号处理器(DSP)主要针对描述连续信号的模拟信号进行运算。
(×)2.DSP是在数字信号变换成模拟信号以后进行高速实时处理的专用处理器。
(×)3.定点与浮点DSP的基本差异在于它们各自表达的数值范围不同。
(×)4.C281x数字信号处理器上的ADC模块将外部的模拟信号转换为数字量,ADC模块可以转换一个控制信号进行滤波或者实现运动系统的闭环控制。
(×)5.处理器还将集成的外设分成高速、中速和低速三组,这样可以方便的设置不同模块的工作频率,从而提高处理器的灵活性和可靠性。
(×)6.F2812处理器的所有外设寄存器全部分组为外设帧PF0,PF1和PF2。
这些帧都映射到处理器的数据区。
(√)7.当捕获单元完成一个捕获时,在FIFO中至少有一个有效的值,如果中断未被屏蔽,中断标志位置位,产生一个外设中断请求。
(×)8.CAN 的基本协议只有物理层协议和网络层协议。
(×)9.多处理器通信方式主要包括空唤醒(idle-line)或地址位(address bit)两种多处理器通信模式。
(√)(√)10.在TMS320F2812数字信号处理器中,ADC模块是一个12位带流水线的模数转换器。
二、选择题(2分/题,共40分)1.在电机控制系统中,PWM信号控制功率开关器件的导通和关闭,功率器件为电机的绕组提供期望的 BA 电阻 B电流和能量 C 电感 D 电容2.光电编码器,是一种通过光电转换将输出轴上的机械几何位移量转换成 B 的传感器A 模拟量B 脉冲或数字量C 通信数据D 输入数据3.当电机轴上的光电编码器产生正交编码脉冲时,可以通过两路脉冲的先后次序确定电机的AA 转动方向B 等效电感C 电枢电阻D 质量4.当使用正弦调整时,PWM产生的交流电机的电流对称PWM信号与非对称的PWM信号相比CA 非对称PWM信号小B 一样大C 对称PWM信号小D 不确定5.CAN 总线通信速率最高达 DA 100MbpsB 115200bps。
《数字信号处理器原理及应用》在线平时作业1
阅读提示:本材料为东北大学21年秋季课程复习资料,供学生参考学习使
用!!!
一、单选题 (共 10 道试题,共 50 分)
1.CAN 总线通信速率最高达
[A.项]100Mbps
[B.项]115200bps
[C.项]9600bps
[D.项]1Mbps
[解析:请按照课程学习要求,完成本题目]
<本题正确答案>:D
2.发送和接收缓冲器使用两个FIFOs
[A.项]32 x 32
[B.项]16x16
[C.项]64 x 64
[D.项]16x32
[解析:请按照课程学习要求,完成本题目]
<本题正确答案>:B
3.如果不明原因使CPU进入死循环,而不进行看门狗复位,看门狗将产生一个信号
[A.项]警告
[B.项]错误
[C.项]提示
[D.项]复位
[解析:请按照课程学习要求,完成本题目]
<本题正确答案>:D
4.TMS320F2812的串口SCI的数据帧包括个起始位
[A.项]2
[B.项]1
[C.项]0
[D.项]1.5
[解析:请按照课程学习要求,完成本题目]
<本题正确答案>:A
5.当总线处于空闲状态时呈
[A.项]隐性电平
[B.项]显性电平
[C.项]高电平
[D.项]低电平
[解析:请按照课程学习要求,完成本题目]。
研究生“现代信号处理”课程教学方法探讨收稿日期:2016-10-27基金项目:2015年度大连交通大学研究生教育质量工程建设项目“《现代信号处理》课程建设”;2014年辽宁省普通高等教育本科教学改革研究项目“电基础理论课与科技创新实践训练结合式教学的研究与实践”(编号:UPRP20140354)作者简介:盛虎(1978-),男,汉,内蒙古赤峰人,博士,副教授,大连交通大学,研究方向:信号处理和嵌入式设计;赵树源(1981-),女,汉,辽宁大连人,硕士,讲师,大连科技学院,研究方向:电子与通信。
鉴于现代信号处理技术的重要意义,大连交通大学为交通信息工程及控制专业和电子与通信工程专业的硕士研究生开设了“现代信号处理”课程,目的在于通过此课程的学习和训练,使学生理解现代信号处理的基本概念和基本理论,掌握现代谱估计、自适应滤波器、高阶统计分析和时频信号分析等现代信号处理技术,并能够应用常用的算法解决交通信息工程和电子与通信方向的实际问题。
早期大连交通大学“现代信号处理”研究生课程的学生人数适中,学生的信号课程和高等数学相关课程的基础知识掌握也较好,知识结构和实践能力差别不大,所以此课程的教学效果和教学质量很好。
此外,本校为了培养适应不同研究领域和应用领域人才的需要,划分了学术型和专业型硕士研究生,造成硕士研究生的知识结构、学习能力和实践动手能力存在很大差异。
由于学生数量以及学生知识和能力方面差异的原因,导致“现代信号处理”课程教学效果和教学质量出现了下降。
教师们在王秋生、章东平、高远、张新峰和黄勇等学者研究的成果之上,针对我校学生的特点对此课程教学方法进行了改进,并取得较好成效。
本文根据此课程教学方法改进及实施过程中取得的经验做简要介绍,以供大家一起探讨。
一、影响课程教学质量的主要原因根据大连交通大学“现代信号处理”研究生课程的实际情况,在教学过程中主要发现以下因素导致教学质量下降:1.学生知识结构、学习能力和实践动手能力差异大。
现代信号处理作业2014年6月Cramer-Rao 不等式的证明定义:设),,,(21n x x x θθ=为参数θ的估计子,参数θ的估计子θ 的偏差定义为该估计子误差的期望值,即θθθθθ-=-=}{}{)(E E b def则估计子θ 称为无偏估计子。
若变差)(θ b 等于零或者θθ=}{ E ,即估计子的期望值等于真实参数,则成估计子θ 的渐进无偏估计子。
无偏性反映了参数估计量的取值在真值θ周围摆动程度。
一个参数往往具有不止一个无偏估计子,因此引入了估计量的有效性这一概念来判断偏估计的优劣,以方差大小来衡量无偏估计子的有效性。
假定参数θ存在无偏估计子1θ 和2θ ,若1θ 具有比2θ 更大的方差,即)var()var(21θθ >,则2θ 对于1θ 相对有效。
对于任意参数θ,我们自然希望得到其更为有效的无偏估计子,即要求方差值尽量小。
究竟无偏估计量的方差能够小到什么程度,是否有下界?如果有,是否有估计子能达到这一下届?这就是本次要讨论的Cramer-Rao 下界。
定义:参数θ的估计子θ 的均方误差)(2θ M 定义为该估计子与真实参数的误差平方的期望值,即)()var(}){()(222θθθθθ b E M +=-=定理:(Cramer-Rao 不等式)令),,,(21n x x x x =为样本向量。
若参数估计θ是真实参数θ的无偏估计,并且θθ∂∂)|(x f 和22)|(θθ∂∂x f 存在,则θ 的均方误差所能达到的下界成为Cramer-Rao 下界等于Fisher 信息的倒数,即)(1}){()(22θθθθJ E M ≥-= 不等式中等号成立的充分必要条件是))(()|(ln θθθθθ-=∂∂ K x f 。
其中)(θK 是θ的某个正函数,并与样本n x x x ,,,21 无关。
定义:品质函数的的方差成为Fisher 信息,用)(θJ 表示,定义为)}|(ln {})]|(ln {[)(222θθθθθx f E x f E J ∂∂-=∂∂=证明Cramer-Rao 不等式:由假设条件可得θθ=}{ E ,则可得0)|()(}{=-=-⎰∞∞-dx x f E θθθθθ(1) 对式(1)两边求偏导,得0)|()(}{=-∂∂=-∂∂⎰∞∞-dx x f E θθθθθθθ 即可得 0)|()()|(=∂∂-+-⎰⎰∞∞-∞∞-dx x f dx x f θθθθθ(2) 另,由复合函数求导法可得)|()|(ln )|(θθθθθx f x f x f ⎥⎦⎤⎢⎣⎡∂∂=∂∂ (3) 又有 ⎰∞∞-=1)|(dx x f θ (4)将式(3)和式(4)代入到式(2),得1))(|()|(ln =-⎥⎦⎤⎢⎣⎡∂∂⎰∞∞-dx x f x f θθθθθ 可改写为 []1)|()()|()|(ln =-⎥⎦⎤⎢⎣⎡∂∂⎰∞∞-dx x f x f x f θθθθθθ (5) 由Cauchy-Schwartz 不等式,可得1)()|()|()|(ln 2≥-⎥⎦⎤⎢⎣⎡∂∂⎰⎰∞∞-∞∞-dx x f dx x f x f θθθθθθ 则 ⎰⎰∞∞-∞∞-⎥⎦⎤⎢⎣⎡∂∂≥-dx x f x f dx x f )|()|(ln 1)()|(2θθθθθθ (6) 由Cauchy-Schwartz 不等式等号成立的条件可知:当且仅当)|())(()|()|(ln θθθθθθθx f K x f x f -=∂∂ ,不等式可取等号。