理论力学(第七版)思考题答案
- 格式:doc
- 大小:218.50 KB
- 文档页数:10
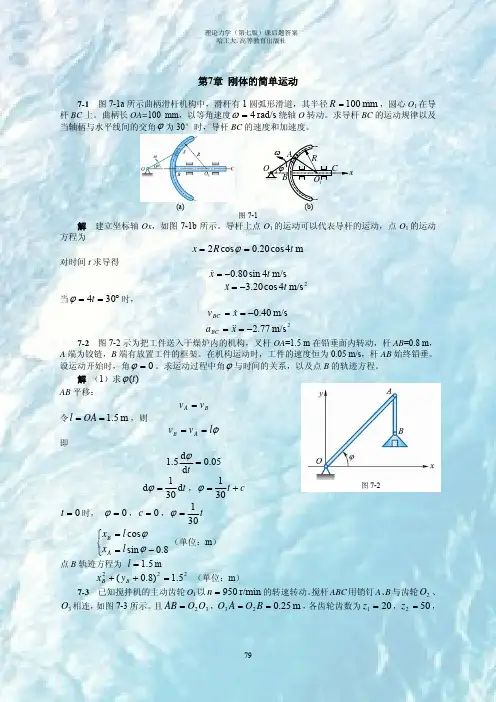
仅供个人学习参考哈工大理论力学(I )第7版部分习题答案1-2两个老师都有布置的题目2-3?2-6?2-14?2-?20?2-30?6-2?6-4?7-9??7-10?7-17?7-21?8-5?8-8?8-16?8-24?10-4?10-6?11-5?11-15?10-3以下题为老师布置必做题目1-1(i,j ),1-2(e,k)2-3,2-6,2-14,2-20,2-306-2,6-47-9,7-10,7-17,7-21,7-268-5,8-8(瞬心后留),8-16,8-2410-3,10-410-611-5,11-1512-10,12-15,综4,15,16,1813-11,13-15,13-166-2图6-2示为把工件送入干燥炉内的机构,叉杆OA=1.5m 在铅垂面内转动,杆AB=0.8m ,A 端为铰链,B 端有放置工件的框架。
在机构运动时,工件的速度恒为0.05m/s ,杆AB 始终铅垂。
设运动开始时,角0=?。
求运动过程中角?与时间的关系,以及点B 的轨迹方程。
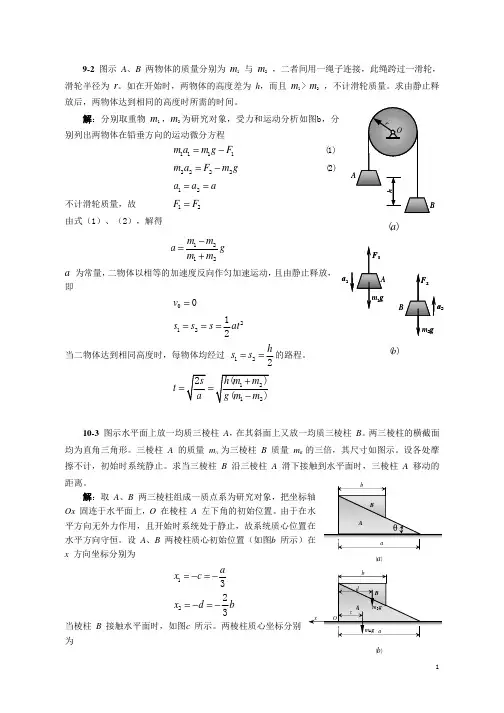
10-3如图所示水平面上放1均质三棱柱A ,在其斜面上又放1均质三棱柱B 。
两三棱柱的横截面均为直角三角形。
三棱柱A 的质量为mA 三棱柱B 质量mB 的3倍,其尺寸如图所示。
设各处摩擦不计,初始时系统静止。
求当三棱柱B 沿三棱柱A 滑下接触到水平面时,三棱柱A 移动的距离。
11-4解取A 、B 两三棱柱组成1质点系为研究对象,把坐标轴Ox 固连于水平面上,O 在棱柱A 左下角的初始位置。
由于在水平方向无外力作用,且开始时系统处于静止,故系统 质心位置在水平方向守恒。
设A 、B 两棱柱质心初始位置(如图b 所示)在x 方向坐标分别为当棱柱B 接触水平面时,如图c 所示。
两棱柱质心坐标分别为系统初始时质心坐标棱柱B 接触水平面时系统质心坐标因并注意到得10-4如图所示,均质杆AB ,长l ,直立在光滑的水平面上。
求它从铅直位无初速地倒下时,端点A 相对图b 所示坐标系的轨迹。


理论力学思考题答案1-1 (1)若F 1=F 2表示力,则一般只说明两个力大小相等,方向相同。
(2)若F 1=F 2表示力,则一般只说明两个力大小相等,方向是否相同,难以判定。
(3)说明两个力大小、方向、作用效果均相同。
1-2 前者为两个矢量相加,后者为两个代数量相加。
1-3 (1)B 处应为拉力,A 处力的方向不对。
(2)C 、B 处力方向不对,A 处力的指向反了。
(3)A 处力的方向不对,本题不属于三力汇交问题。
(4)A 、B 处力的方向不对。
1-4 不能。
因为在B 点加和力F 等值反向的力会形成力偶。
1-5 不能平衡。
沿着AB 的方向。
1-7 提示:单独画销钉受力图,力F 作用在销钉上;若销钉属于AC ,则力F 作用在AC 上。
受力图略。
2-1 根据电线所受力的三角形可得结论。
2-2不同。
2-3(a )图和(b )图中B 处约束力相同,其余不同。
2-4(a )力偶由螺杆上的摩擦力和法向力的水平分力形成的力偶平衡,螺杆上的摩擦力与法向力的铅直方向的分力与N F 平衡。
(b )重力P 与O 处的约束力构成力偶与M 平衡。
2-5可能是一个力和平衡。
2-6可能是一个力;不可能是一个力偶;可能是一个力和一个力偶。
2-7一个力偶或平衡。
2-8(1)不可能;(2)可能;(3)可能;(4)可能;(5)不可能;(6)不可能。
2-9主矢:''RC RA F F =,平行于BO ;主矩:'2C RA M aF =,顺时针。
2-10正确:B ;不正确:A ,C ,D 。
2-11提示:OA 部分相当一个二力构件,A 处约束力应沿OA ,从右段可以判别B 处约束力应平行于DE 。
3-13-2 (1)能;(2)不能;(3)不能;(4)不能;(5)不能;(6)能。
3-3 (1)不等;(2)相等。
3-4 (1)'()B Fa =-M j k ;(2)'RC F =-F i ,C Fa =-M k 。
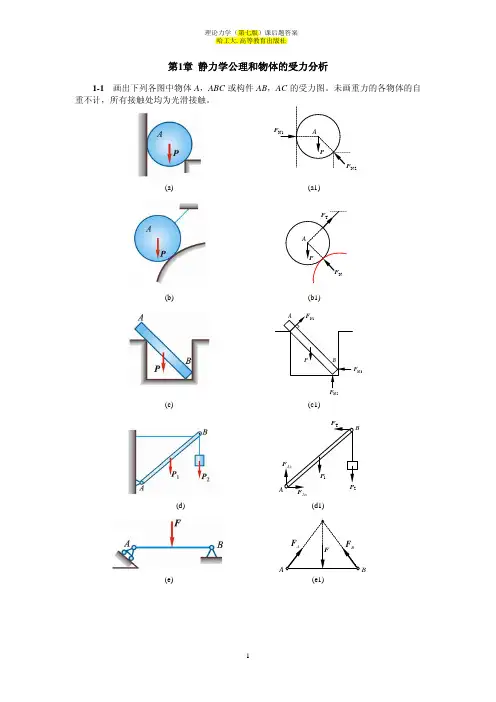
.----------------------------------------理论力学(第七版)课后题答案 哈工大.高等教育出版社 -------------------------------- 第1章 静力学公理和物体的受力分析1-1 画出下列各图中物体 A ,ABC 或构件 AB ,AC 的受力图。
未画重力的各物体的自重不计,所有接触处均为光滑接触。
F N1A PF N 2(a) (a1)F TA PF N(b)(b1)AF N1P BF N 3F N 2(c) (c1)F TBF AyP 1P 2AF Ax(d) (d1)F AF BFAB(e)(e1)qFF Ay F BF AxA B(f) (f1)FBC F CAF A(g) (g1)F Ay FCCA F Ax BP1 P2(h) (h1)BFCF CF AxDAF Ay(i) (i1)(j) (j1)BF B FCPF AyF AxA(k) (k1)F CAF AB 2 F AC CA2 F ABBF ACF BAA P (l) (l1)(l2)(l3)图 1-11-2 画出下列每个标注字符的物体的受力图。
题图中未画重力的各物体的自重不计,所 有接触处均为光滑接触。
F N 2C2 F P 2(a1) F N1N(a)BF N1BC F N 2F NP 2P1P1F AyF Ay F AxF AxAA(a2) (a3)F N1AP1F N3B P 2F N 2(b) (b1)2 F NF N3F N1ABP 2P1F N F N 2(b2)(b3)F AyF AxA C D F N2BP 2P 1F N1(c)(c1)F AyF TAF AxD2 F F N2TBP 1F N1P 2(c2)(c3)F AyF BqBAF AxCDF C(d)(d1)F DyF AyF BqqD2 FDxBAF AxCF Dx D 2 FDyF C(d2) (d3)F Ay2 FBxqBF AyF AxqAB 2F ByF AxF CxC F CyP F BxAB PF Cx (e1)CF ByF Cy(e)(e2)(e3)F 1CF 2F AyF ByABF AxF Bx(f)(f1)F Cx2 FCxCCF 1F CyF 2 F 2F AyCyF ByAF BxF Ax B(f2)(f3)F BF AyCBAF AxP(g)(g1)2 F CyF T2 FCxCF AyF BF TDCF AxBAF Cx P (g2)(g3)DF 1F CyF B2 F 2F BBCF CxBF Ay AF Ax(h)(h1)(h2)A F AxF AyF CyF CxC2 A F EF CyF F OyCDF OxF Cx 2EOB(i)(i1)(i2)A A2 F Ax2 FE2 F AyFEC D F ByF ByF OyF BxF OxF BxOBB (i3)(i4)F AyDE F CxF TA F AxF ByC CHF By F Cy BPF BxF BxB(j)(j1)(j2)F Ay F Dy 22 F Ey2 F CF Cx 2 E F AxT 2 D F T 22FExF ExA D F Dx 2E F DxF T3F T12FCyF DyF Ey(j3)(j4)(j5)EFF BCED2 BF Cx⎝2 2 F DEF Cy(k)(k1)F BF FC BF Cx⎝EC F Cy90︒ ⎝FDED DF AyF AyAAF AxF Ax(k2) (k3)F B2 FBF 1F DBBDCAF AF C(l)(l1)(l2)F 22 DF DF 1F 2DBAC EE F EF AF C F E(l3)(l4)或2 2 F DyF2F 1F F Dy F 2F 1B 2 DF DxF DxBBD D F ExA C E C E F ExF CF EyF AF CF Ey(l2)’(l3)’(l4)’2 F ADAF CyF CxCF 1B(m)(m1)F ADDF ADHEF 2A DF EF HF AD 2(m2)(m3)F N AAF kF N BF OyF OxBO(n) (n1)F N1B Dq2 F BF N 2F N3(n2)FB D FF C F EF AF G GCEA(o)(o1)FBB DFDF BF E F FF C F D2 FEA F AF B 2CD(o2)(o3) (o4) 图 1-2第2章 平面汇交力系与平面力偶系2-1 铆接薄板在孔心 A ,B 和 C 处受 3个力作用,如图 2-1a 所示。
理论力学思考题答案1-1 (1)若F 1=F 2表示力,则一般只说明两个力大小相等,方向相同。
(2)若F 1=F 2表示力,则一般只说明两个力大小相等,方向是否相同,难以判定。
(3)说明两个力大小、方向、作用效果均相同。
1-2 前者为两个矢量相加,后者为两个代数量相加。
1-3 (1)B 处应为拉力,A 处力的方向不对。
(2)C 、B 处力方向不对,A 处力的指向反了。
(3)A 处力的方向不对,本题不属于三力汇交问题。
(4)A 、B 处力的方向不对。
1-4 不能。
因为在B 点加和力F 等值反向的力会形成力偶。
1-5 不能平衡。
沿着AB 的方向。
1-7 提示:单独画销钉受力图,力F 作用在销钉上;若销钉属于AC ,则力F 作用在AC 上。
受力图略。
2-1 根据电线所受力的三角形可得结论。
2-2不同。
2-3(a )图和(b )图中B 处约束力相同,其余不同。
2-4(a )力偶由螺杆上的摩擦力和法向力的水平分力形成的力偶平衡,螺杆上的摩擦力与法向力的铅直方向的分力与N F 平衡。
(b )重力P 与O 处的约束力构成力偶与M 平衡。
2-5可能是一个力和平衡。
2-6可能是一个力;不可能是一个力偶;可能是一个力和一个力偶。
2-7一个力偶或平衡。
2-8(1)不可能;(2)可能;(3)可能;(4)可能;(5)不可能;(6)不可能。
2-9主矢:''RC RA F F =,平行于BO ;主矩:'2C RA M aF =,顺时针。
2-10正确:B ;不正确:A ,C ,D 。
2-11提示:OA 部分相当一个二力构件,A 处约束力应沿OA ,从右段可以判别B 处约束力应平行于DE 。
3-13-2 (1)能;(2)不能;(3)不能;(4)不能;(5)不能;(6)能。
3-3 (1)不等;(2)相等。
3-4 (1)'()B Fa =-M j k ;(2)'RC F =-F i ,C Fa =-M k 。
3-5 各为5个。
3-6为超静定问题。
3-7空间任意力系简化的最终结果为合力、合力偶、力螺旋、平衡四种情况,分别考虑两个力能否与一个力、一个力偶、力螺旋(力螺旋可以看成空间不确定的两个力)、平衡四种情况平衡。
3-8 一定平衡。
3-9 (2)(4)可能;(1)(3)不可能。
3-10 在杆正中间。
改变。
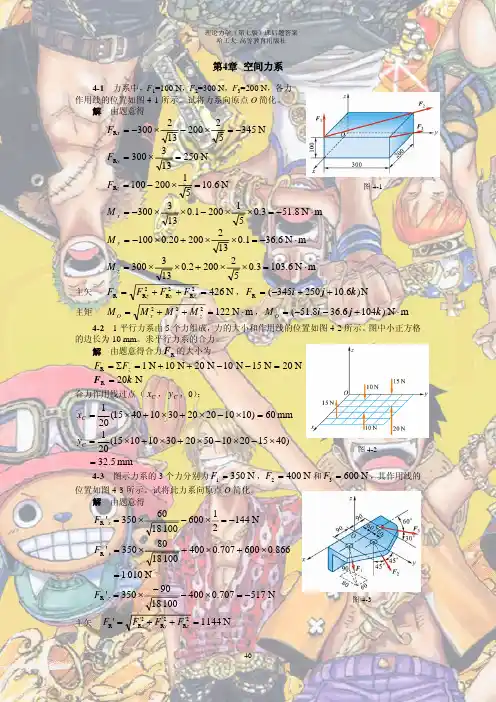
4-1 摩擦力为100N 。
4-2 三角带传递的拉力大。
取平胶带与三角带横截面分析正压力,可见三角带的正压力大于平胶带的正压力。
4-3 在相同外力(力偶或轴向力)作用下,参看上题可知,方牙螺纹产生的摩擦力较小,而三角螺纹产生的摩擦力较大,这正符合传动与锁紧的要求。
4-44-5 物块不动。
主动力合力的作用线在摩擦角内且向下。
4-64-7 都达到最大值。
不相等。
若 A ,B 两处均未达到临界状态,则不能分别求出 A ,B 两处的静滑动摩擦力;若 A 处已达到临界状态,且力F 为已知,则可以分别求出 A ,B 两处的静滑动摩擦力。
4-8 设地面光滑,考虑汽车前轮(被动轮)、后轮(主动轮)在力与力偶作用下相对地面运动的情况,可知汽车前后轮摩擦力的方向不同。
自行车也一样。
需根据平衡条件或动力学条件求其滑动摩擦力。
一般不等于动滑动摩擦力。
一般不等于最大静滑动摩擦力。
4-9 s f R<δ,R P F δ= 5-1表示的是点的全加速度,表示的是点的加速度的大小;表示的是点的速度,表示的是速度在柱坐标或球坐标中沿矢径方向的投影。
5-2图示各点的速度均为可能,在速度可能的情况下,点C ,E ,F ,G 的加速度为不可能,点A ,B ,D 的加速度为可能。
5-3根据点M 运动的弧坐标表达式,对时间求导可知其速度大小为常数,切向加速度为零,法向加速度为。
由此可知点M 的加速度越来越大,点M 跑得既不快,也不慢,即点M 作匀速曲线运动。
5-4点作曲线运动时,点的加速度是恒矢量,但点的切向加速度的大小不一定不变,所以点不一定作匀变速运动。
5-5既然作曲线运动的两个动点的初速度相同、运动轨迹相同、法向加速度也相同,则曲线的曲率半径也相同,可知上述结论均正确。
若两点作直线运动,法向加速度均为零,任一瞬时的切向加速度不一定相同,从而速度和运动方程也不相同。
5-6因为 y =f (x ),则x y v dx dy v =,因为x v 已知,且0≠x v 及dx dy 存在的情况下,可求出y v ,由22y x v v v +=,v v x =αcos ,v v y =βcos ,可求出 ,从而dt dv a t =,dt v d a =则 可确定。
在0=x v 的情况下,点可沿与 y 轴平行的直线运动,这时点的速度不能完全确定。
若dx dy 不存在,则y v 也不能确定。
在 已知且有时间函数的情况下,x x v a =可以确定。
5-7(1)点沿曲线作匀速运动,其切向加速度为零,点的法向加速度即为全加速度。
(2)点沿曲线运动,在该瞬时其速度为零,则点的法向加速度为零,点的切向加速度即为全加速度。
(3)点沿直线作变速运动,法向加速度为零,点的切向加速度即为点的全加速度。
(4)点沿曲线作变速运动,三种加速度的关系为t n a a a +=。
5-8(1)不正确;(2)正确;(3)不正确。
5-9用极坐标描述点的运动,是把点的运动视为绕极径的转动和沿极径运动的叠加,2ϕρρ -=a 和ϕa 中的ϕρ出现的原因是这两种运动相互影响的结果。
6-1不对。
应该考虑角加速度的方向。
6-2不一定。
如各点轨迹都为圆周的刚体平移。
6-3 (1)(3)(4)为平移。
6-4刚体作匀速转动时,角加速度α= 0,由此积分得转动方程为;刚体作匀加速转动,角加速度α= C ,由此积分得转动方程为 。
6-5图 a 中与两杆相连的物体为刚体平移;图 b 中的物体为定轴转动。
6-6不对。
物块不是鼓轮上的点,这样度量 φ 角的方法不正确。
6-7(1)条件充分。
点 A 到转轴的距离 R 与点 A 的速度 v 已知,则刚体的角速度已知。
该点的全加速度已知,则其与法线间的夹角已知,设为 θ ,则2tan ωθa=已知,则角加速度也已知,从而可求出刚体上任意点的速度和加速度的大小。
(2)条件充分。
点 A 的法向、切向加速度与 R 已知,从而刚体的角速度和角加速度也已知。
(3)条件充分。
点 A 的切向加速度与 R 已知,则刚体的角加速度已知,而全加速度的方向已知,从而刚体的角速度已知。
(4)条件不充分。
点 A 的法向加速度及该点的速度已知,而刚体的角加速度难以确定,所以条件不充分。
(5)条件充分。
已知点 A 的法向加速度与 R ,可确定刚体的角速度,而已知该点的全加速度方向,则刚体的角加速度也可以确定。
7-1在选择动点和动系时,应遵循两条原则:一是动点和动系不能选在同一刚体上;二是应使动点的相对轨迹易于确定,否则将给计算带来不变。
对于图示机构,若以曲柄为动系,滑块为动点,若不计滑块的尺寸,则动点相对动系无运动。
若以 B 上的点 A 为动点,以曲柄为动参考系,可以求出 B 的角速度,但实际上由于相对轨迹不清楚,相对法向加速度难以确定,所以难以求出 B 的角加速度。
7-2均有错误。
图 a 中的绝对速度应在牵连速度和相对速度的对角线上;图 b中的错误为牵连速度的错误,从而引起相对速度的错误。
7-3均有错误。
(a)中的速度四边形不对,相对速度不沿水平方向,应沿杆OC 方向;(b)中虽然ω=常量,但不能认为=常量,不等于零;(c)中的投影式不对,应为。
7-4速度表达式、求导表达式都对,求绝对导数(相对定系求导),则。
在动系为平移的情况下,。
在动系为转动情况下,。
7-5正确。
不正确,因为有相对运动,导致牵连点的位置不断变化,使产生新的增量,而是动系上在该瞬时与动点重合那一点的切向加速度。
正确,因为只有变矢量才有绝对导数和相对导数之分,而是标量,无论是绝对导数还是相对导数,其意义是相同的,都代表相对切向加速度的大小。
均正确。
7-6图 a 正确,图 b 不正确。
原因是相对轨迹分析有误,相对加速度分析的不正确。
7-7若定参考系是不动的,则按速度合成定理和加速度合成定理求出的速度和加速度为绝对速度和绝对加速度。
若定参考系在运动,按速度合成定理和加速度合成定理求出的速度和加速度应理解为相对速度和相对加速度。
7-8设定系为直角坐标系Oxy,动系为极坐标系,其相对于定系绕O轴转动,动点沿极径作相对运动,则,按公式求出绝对加速度沿极径、极角方向的投影即可。
8-1均不可能。
利用速度投影定理考虑。
8-2不对。
,不是同一刚体的速度,不能这样确定速度瞬心。
8-3不对。
杆和三角板ABC不是同一刚体,且两物体角速度不同,三角板的瞬心与干的转轴不重合。
8-4各点速度、加速度在该瞬时一定相等。
用求加速度的基点法可求出此时图形的角速度、角加速度均等于零。
8-5在图(a)中,=,= ,因为杆AB作平移;在图(b)中,=,≠,因为杆AB作瞬时平移。
8-6车轮的角加速度等于。
可把曲面当作固定不动的曲线齿条,车轮作为齿轮,则齿轮与齿条接触处的速度和切向加速度应该相等,应有,然后取轮心点O 为基点可得此结果和速度瞬心C的加速度大小和方向。
8-7由加速度的基点法公式开始,让ω=0,则有,把此式沿着两点连线投影即可。
8-8可能:图 b、e;不可能:图a、c、d、f、g、h、i、j、k和l。
主要依据是求加速度基点法公式,选一点为基点,求另一点的加速度,看看是否可能。
8-9(1)单取点A或B为基点求点C的速度和加速度均为三个未知量,所以应分别取A,B为基点,同时求点C的速度和加速度,转换为两个未知量求解(如图a)。
(2)取点B为基点求点C的速度和加速度,选点C为动点,动系建于杆,求点C 的绝对速度与绝对加速度,由,转换为两个未知数求解(如图b)。
(3)分别取A,B为基点,同时求点D的速度和加速度,联立求得,再求。
8-10(1)是。
把,沿AB方向与垂直于AB的方向分解,并选点B为基点,求点A的速度,可求得杆AB的角速度为。
再以点B为基点,求点E的速度,同样把点E的速度沿AB方向与垂直于AB的方向分解,可求得杆AB的角速度为。
这样就有,然后利用线段比可得结果。
也可用一简捷方法得此结果。
选点A(或点B)为基点,则杆AB上任一点E的速度为= + ,垂直于杆AB,杆AB上各点相对于基点A的速度矢端形成一条直线,又=+,所以只需把此直线沿方向移动距离,就是任一点E的速度的矢端。
(2)设点A或点B的速度在AB连线上的投影为,从点E沿AB量取= ,得一点,过此点作AB的垂线和CD的交点即为点H的位置。
(3) A.不对。
若为零,则点P为杆AB的速度瞬心,,应垂直于杆AB。
B .不对。
以点B 为基点,求点P 的速度,可得点P 的速度沿CD 方向。