第六章磁电式传感器共29页文档
- 格式:ppt
- 大小:758.00 KB
- 文档页数:29


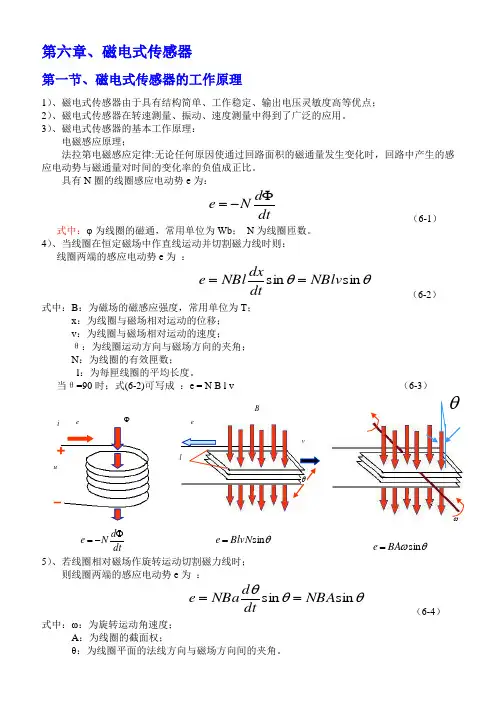
第六章、磁电式传感器第一节、磁电式传感器的工作原理1)、磁电式传感器由于具有结构简单、工作稳定、输出电压灵敏度高等优点; 2)、磁电式传感器在转速测量、振动、速度测量中得到了广泛的应用。
3)、磁电式传感器的基本工作原理:电磁感应原理;法拉第电磁感应定律:无论任何原因使通过回路面积的磁通量发生变化时,回路中产生的感应电动势与磁通量对时间的变化率的负值成正比。
具有N 圈的线圈感应电动势e 为:dt d Ne Φ-= (6-1)式中:φ为线圈的磁通,常用单位为Wb ; N 为线圈匝数。
4)、当线圈在恒定磁场中作直线运动并切割磁力线时则:线圈两端的感应电动势e 为 :θθsin sin NBlv dtdxNBl e == (6-2)式中:B :为磁场的磁感应强度,常用单位为T ;x :为线圈与磁场相对运动的位移; v :为线圈与磁场相对运动的速度;θ:为线圈运动方向与磁场方向的夹角; N :为线圈的有效匣数;l :为每匣线圈的平均长度。
当θ=90时;式(6-2)可写成 :e = N B l v (6-3);5)、若线圈相对磁场作旋转运动切割磁力线时;则线圈两端的感应电动势e 为 :θθθsin sin NBA dtd NBae == (6-4)式中:ω:为旋转运动角速度;A :为线圈的截面权;θ:为线圈平面的法线方向与磁场方向间的夹角。
Φ-+ueivBleθωθsin BlvN e =θωsin BA e =当θ=90时,式(6-4)可写成 :e = N B A ω (6-5)当N 、B 、A 、l 为定值时,感应电动势e 与线圈和磁场的相对运动速度v (或ω)成正比。
由于速度和位移、加速度之间是积分、微分的关系,因此只要适当加入积分、微分电路,便能通过测量感应电动势得到位移和加速度。
第二节、磁电式传感器的结构与应用如前所述,可以用改变磁通方法或用线圈切割磁力线方法产生感应电动势;所以磁电式传感器可以分为:变磁通式、恒磁通式两种类型。