SZJ1000A型直线摆动式装船机结构特性(精)
- 格式:doc
- 大小:76.00 KB
- 文档页数:6
装船机工作原理
装船机是一种用来装卸货物的机械设备,工作原理是通过机械臂或者卷扬机构,将货物从码头或者岸边运输到船舱内。
装船机通常由主体结构、起重系统、传动系统和控制系统等部分组成。
下面将分别介绍这几个部分的工作原理。
主体结构是装船机的骨架,使其具有稳定的支撑能力。
通常采用钢结构,通过耐力学和结构分析计算得出所需的各种结构要素尺寸和强度,以确保装船机能够承受货物的负载并保持平衡。
起重系统是装船机的核心部分,主要由起重臂、抓斗和升降机构等组成。
起重臂通过铰链连接到主体结构,使其能够自由旋转,并根据需要延伸或收缩。
抓斗则用于抓取货物,通常由可在两个方向上开合的夹板组成。
升降机构可将抓斗提升或降低到合适的位置,实现货物的装卸。
传动系统主要包括电动机、减速器和传动装置等。
电动机通过电能转换为机械能,提供动力驱动装船机的各个部件运动。
减速器用于降低电动机的转速,提供足够的扭矩输出。
传动装置将电动机的转动传递给起重臂和升降机构,实现装船机的各项功能。
控制系统用于控制装船机的运动和操作。
通常采用电气或液压控制,包括开关、按钮、传感器和控制器等。
通过操作控制设备,操作人员可以准确控制装船机的起升、伸缩和旋转等动作。
总之,装船机通过起重系统、传动系统和控制系统的协同作用,
实现对货物的装卸,提高装卸效率,减少人力劳动,为船舶装载作业提供了便利。
●单吊杆双吊杆●单吊杆的轴向压力主要取决于吊货索的拉力。
●千斤索的受力随着吊杆仰角增大而减小。
●双杆作业时工作负荷约为单杆作业工作负荷的40%~60%。
●吊杆的轴向压力R与千斤索的受力T无关。
吊杆的轴向压力R与吊杆的仰角无关。
●受力最小的绳索是中稳索。
●单杆受力最大时候,轻吊杆仰角15°重型吊杆仰角25°。
●仰角↑,千斤索拉力↓●吊杆的轴向压力R主要取决于吊杆长度与支悬高度之比L/H。
●吊杆的轴向压力R主要取决于吊货滑车组的数目m●千斤索张力取决于吊杆的仰角。
●吊杆自重G估算的依据:1G/2作用在千斤索(吊杆头部)上;2G/2作用在桅柱上。
●单千斤索单吊杆作业的稳索受力可按载荷的20%估算。
●双杆作业受力最小的是中盖(中稳索)。
最易磨损的绳索是吊货索。
●双杆操作比单杆错做的安全负荷小,主要是因为1,稳索的拉力造成很大的垂向分力;2吊杆的轴向压力增大。
●舷内吊杆的布置位置主要考虑舱口货物位置,吊杆受力和后仰。
●双杆作业吊货索夹角<120°。
●双杆作业舷外吊杆仰角45°,舷内吊杆仰角最大75°,最小15°。
舷内吊杆的仰角不能太大,否则会发生后倾(千斤索的受力为0或者负值)。
●双杆作业舷外稳索在吊杆根部后方且高一点,舷内吊杆稳索在吊杆根部连线前方且和内吊杆成90°。
●增大稳索与吊杆在水平面内的夹角可以克服舷内吊杆后仰或回跳。
●“八字关”是指两根吊杆同时伸出个子的舷外成八字形,使吊货索受力大于货物重力,要避免。
●舷内舱口上的吊杆叫大关,舷外的吊杆俗称小关。
●双杆作业受力最大的绳索是老盖也就是保险稳索。
●双杆作业,舷外吊杆水平投影与船舶首尾中心线夹角45~65°。
●减小稳索对舷外吊杆的轴向压力,布置时其系结点应尽量向后和提高。
“后高”●舷内吊杆稳索布置应尽量使其水平投影与吊杆水平投影夹角90°。
●为减小舷内吊杆稳索张力,其下系结点应尽量系在舷墙低令上,也就是舱口中部或偏前。
直线摆动式装船机伸缩补偿变幅系统介绍
彭彬文;曾勇
【期刊名称】《中国河运》
【年(卷),期】1992(000)012
【总页数】3页(P38-40)
【作者】彭彬文;曾勇
【作者单位】不详;不详
【正文语种】中文
【中图分类】U653.928.1
【相关文献】
1.1000 t/h直线摆动式装船机的回转式安装方法 [J], 王龙;许芳芳
2.SZJ1000A型直线摆动式装船机结构特性 [J], 陈宗生
3.直线摆动式散货装船机的构造及设计特点 [J], 张昕初
4.直线摆动式散货装船机臂架的优化设计 [J], 沈家桢
5.直线摆动式散货装船机的惯性力分析 [J], 谢道俊
因版权原因,仅展示原文概要,查看原文内容请购买。

移动式装船机技术分析摘要:装船机是一种用于干散货装船的大型港口机械,一般由皮带机、尾车、门架、俯仰装置、塔架等部分组成。
装船机对码头的正常运行来说非常重要,主要负责将散料运输到船舱中。
但是,目前装船机的工作环境十分恶劣且存在着大量的安全风险,因此,通过PLC和变频技术能够提高设备的稳定性并降低工作难度。
关键词:移动式;装船机技术;分析引言随着国内制造能力的进一步提高,大型设备的供应将逐渐成为一种趋势。
整个机床与散货相比具有明显的优势,可以充分利用国内资源,节约成本,有效地简化了国外最终装配过程中可能出现的各种问题。
整机交付量反映了企业在制造、装配、运输等方面的综合实力,国内大型企业普遍倾向于采用整机交接方案来满足客户需求。
一、研究背景随着现代社会工业化进程的深入发展,对各种砂岩资源的需求增加,以及对天然砂岩资源的过度开采不利于环境保护,人们对砂岩资源的机理越来越重视,根据目前的发现,砂岩机理越来越受欢迎,这种砂岩集中于生产,并通过搬运,运输无处不在。
此外,沙的集中、搬运和运输投资、采矿成本低、工艺流程短、经济效益高,作为重要的战略性矿产资源,很多地方都高度重视沙的开发,这也是发展的必然趋势。
一些国家和地区正在密切关注矿产资源的开发,并计划根据周边条件开发相应的制砂设备和码头。
可以看出,在不久的将来,随着制砂技术条件的成熟,将形成大规模采矿的形势,这种繁荣将促进采矿设备及相关专业矿物清洗剂产品的需求,也将为移动船舶机械的发展带来机遇。
对于沙输机构所需的船舶设备,使用3750t/h移动式船舶装载机进行分析。
二、移动式装船机1)可在作业过程中延伸、倾斜和旋转的臂架、摆式、弹性的臂架和臂架运输工具,以及旋转平台、支柱和转子,您可以使用臂架转换、旋转和行走机构来重新定位套筒,这种形式需要复杂的旋转支撑和更大的结构、更多的机构和高质量的臂架,因为它具有更好的功能、更好的作业复盖面和更高的运输效率,以适应船舶在两侧的运输中也可以使用。
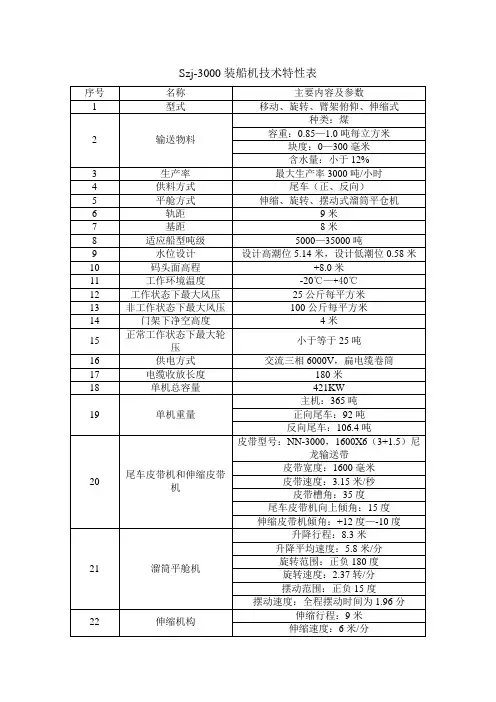
Szj-3000装船机技术特性表序号名称主要内容及参数1 型式移动、旋转、臂架俯仰、伸缩式2 输送物料种类:煤容重:0.85—1.0吨每立方米块度:0—300毫米含水量:小于12%3 生产率最大生产率3000吨/小时4 供料方式尾车(正、反向)5 平舱方式伸缩、旋转、摆动式溜筒平仓机6 轨距9米7 基距8米8 适应船型吨级5000—35000吨9 水位设计设计高潮位5.14米,设计低潮位0.58米10 码头面高程+8.0米11 工作环境温度-20℃—+40℃12 工作状态下最大风压25公斤每平方米13 非工作状态下最大风压100公斤每平方米14 门架下净空高度4米15 正常工作状态下最大轮压小于等于25吨16 供电方式交流三相6000V,扁电缆卷筒17 电缆收放长度180米18 单机总容量421KW19 单机重量主机:365吨正向尾车:92吨反向尾车:106.4吨20 尾车皮带机和伸缩皮带机皮带型号:NN-3000,1600X6(3+1.5)尼龙输送带皮带宽度:1600毫米皮带速度:3.15米/秒皮带槽角:35度尾车皮带机向上倾角:15度伸缩皮带机倾角:+12度—-10度21 溜筒平舱机升降行程:8.3米升降平均速度:5.8米/分旋转范围:正负180度旋转速度:2.37转/分摆动范围:正负15度摆动速度:全程摆动时间为1.96分22 伸缩机构伸缩行程:9米伸缩速度:6米/分23俯仰机构俯仰角度:正常工作角度:+12度—-10度24 非工作最大仰角:+40度25 俯仰速度:工作角度范围内俯仰时间50秒26 旋转机构旋转半径:22.5米——31.5米旋转角度:+130度——-100度旋转速度:0.3转/分27 行走机构行走速度:最大26米/分行走轮直径:550毫米最大行走距离:360米附:7万吨散货船基本外型尺寸7万吨散货船外型尺寸:总长228米,型宽32.3米,型深19.6米,满载吃水14.2米。
大型装船机的技术性能及电气系统南通润邦重机有限公司赵国庆随着40万吨散货船,“VALE CHINA”的下水,大型装船机向12000T/H以上发展已经是不争的事实。
大型装船机的技术性能要求日趋完善,电控的设计不是千篇一律,启动方式有(Direct On Line),YD (tar-Delta)SS(oft. Starter)FC(Frequency Control);控制方式有:RC(lay control),PLC,PLC+CMS,SCADE(Supervisory Control And Data Acquisition)等。
关键词(Keyword):人机工程学Ergonomics HMI-人机界面 CMS-装船机管理系统,SCADA-数据采集与监视控制系统das data acquisition system 数据采集与处理系统 ddc direct digital control 现场总线控制系统 SCS Sequence Control System 顺序(程序)控制系统BLK bulk 散装(货) BC Bulk carriers 散装船 SCADA(Supervisory Control And Data Acquisition)数据采集与监视控制系统。
TMR: Tele Meter Reading 电能量计量系统OMS:Outage Management System 。
GPS:停电管理系统: global position System 全球定位系统。
MODEM : Modulator and Demodulator 调制器和解调器DCE: Data Communication Equipment 数据连接设备计算机软件相关 HMI: Human Machine Interface 人机界面CSCS : Computer Supervisory Control System 计算机监控系统人机工程学Ergonomics1,装船机设计标准国外著名公司可根据用户的要求设计, 采用不同国家的最新标准, 如欧洲、德国、日本、美国等:相关标准。
哈尔滨工程大学-船舶设计原理考试复习答案最新最全1. 试航航速V:一般指满载试航速度,即主机在最大持续功率的情况下,静止在水中(不超过三级风二级浪)t的新船满载试航所测得的速度。
服务航速V是指船平时营运时所使用的速度,一般是平均值。
S2. 续航力:一般指在规定的航速或主机功率情下,船上一次装足的燃料可供船连续航行的距离。
3. 自持力:亦称自给力,指船上所带淡水和食品在海上所能维持的天数。
4. 船级(船舶入级):是指新船准备入哪个船级社,要求取得什么船级标志,确定设计满足的规范。
35. 积载因数C:对于干货船,通常用其表征货物所需的容积,即每吨货所要求的货舱容积数,单位是T/m。
6. 船型:是指船的建筑特征,包括上层建筑形式,机舱位置,货舱划分,甲板层数,甲板间高等。
7. 载重量系数η=D/Δ:它表示D 占Δ的百分数,对同样Δ的船来说,η大者,L小,表示其载重多。
DWW00W00DWW而对同一使用任务要求,即D和其他要求相同时,η大者,说明Δ小些也能满足要求。
WDW8. 平方模数法:假定W比例于船体结构部件的总面积(用L,B,D的某种组合)如W=CL(aB+bD)。
该方法对总hhh纵强度问题不突出的的船,计算结果比较准确,适用于小船尤其是内河船。
9. 立方模数法:假定W比例于船的内部总体积(用LBD反映)则有W=CLBD。
该方法以船主体的内部体积为hhh模数进行换算,C值随L增加而减少的趋势比较稳定。
对大、中型船较为适用。
缺点:没有考虑船体的肥瘦h程度,把LBD各要素对W的影响看成是等同的。
h10. 诺曼系数N:错误~未找到引用源。
,表示的是增加1Tdw时船所要增加的浮力。
11. 载重型船:指船的载重量占船的排水量比例较大的船舶。
12. 布置地位型船:又称容积型船,是指为布置各种用途的舱室,设备等需要较大的舱容及甲板面积的一类船舶。
13. 失速:风浪失速是指船舶在海上航行,由于受风和浪的扰动,航行的速度较静水条件时的减少量,这种速度损失有时是相当大的。
集装箱船结构的共性技术简介集装箱船结构的共性技术简介江克进提要本文就集装箱船结构设计的一些共性技术作了简要探讨,并对结构设计中的合理性问题提出了一些看法,希望这些意见能有助于该类船舶的设计优化,提高其有效载箱量.关键词集装箱船结构设计共性技术1前言集装箱运输是一种比较新型但又发展迅速的货物运输方式,在较短的时间内集装箱船也从最初的几百TEU发展到现在的10000TEU左右.然而在集装箱船的结构设计过程中存在一些共性的特征问题.研究这些共性技术,使结构设计更加合理,也是提高载箱量有效途径之一.2船体构架骨架型式的选择2.1集装箱的比重(表1,集装箱尺寸采用ISO6346.2的要求):表1各类集装箱比重一览名称长度宽度最小高度满箱重比重(ft)(m)(m)(m)(tons)(t/m3)206.0582.4382.43824.00.674012.1292.4382.43830.480.4240UR12.1292.5002.59130.480.394513.7162.4382.74332.500-354814,6312.5912.90830.480-285316.1542,5912.90830.480-25由上表可知,所有集装箱的比重均小于1.除20ft外.其余均为水的比重一半不到.而集装箱船通常是均匀装载,因此集装箱船在其整个使用寿命期内的装载状态中,基本上处于中拱弯矩受力状态. 这也是在集装箱船的设计当中,为什么往往中拱弯矩很大,而中垂状态基本上不用考虑.这是决定结构设计的很重要的基础条件之一.22.2构架型式的选取众所周知,构架型式选择合理与否,将直接影响空船重量.集装箱船为了增加载箱量,尽量增大货舱开口,以便最大限度地利用舱内空间来载运集装箱, 造成甲板板的宽度较小(一般在2米左右).为承受总纵强度(中拱),甲板必然要采用纵骨架式(当然, 对一般大中型运输船,为承受以总纵强度为主的船体结构,同样需要选用纵骨架式).基于同样的理由, 底部构架一般也用纵骨架式.至于舷侧构架,则需根据其型深,吃水,边舱宽度,局部强度和特殊加强的需要来选用构架型式.对于大中型集装箱船,一般也选用纵骨架式(如果边舱宽度允许纵向通道有足够宽度的前提下).集装箱船特殊的载荷工况,决定着其船体主要构架的型式.图1是某型集装箱船的典型舯剖面图,可见其主要结构基本上都采用纵向结构.3船体构架间尺度的选择集装箱船是布置地位型船,即其布置受集装箱尺度所制约,总布置是如此,结构的构件布置也是如此.3.1二甲板高度的选择二甲板与上甲板以及舷侧和纵隔壁形成的纵向抗扭箱,它是船舶承受总纵强度和扭转强度的关键部件,也具有船舶纵向内部通道的功能(还需视破舱稳性是否满足而定),选择是否合理,将是设计的关键.另外,舱内集装箱高度一般取2.591米(8.5ft),在箱高范国内通常加两道纵骨(对纵骨架式而言)进行加强.所以在选取二甲板高度时应考虑:a)便于布置电缆,管子的纵向通过,特别是一些粗大的管子,如集中透气管,排水总管等,并需考虑船员能安全行走于其下;图1集装箱船的典型舯剖面图b)如不能恰好为集装箱的高度,则其高度应选取在集装箱的顶朋芪部或上下1/3之处,以尽量减少构架数量.具体视采用的构架尺度而定.c)保证通道宽度至少为600ram.图2是二甲板高度的示例,可见二甲板的高度与一层箱脚的位置对应,比较有利于力的传递,且应考虑到在首尾部因线型变化而形成台架时,增设垫板后的高度,因而应稍降低些,以期与箱底顺对齐, 以用来承受船舶摇摆时传来的侧向压力,并将其传至舷侧构架.3.2双层底纵桁位置的选择双层底纵桁的位置一般选择在内底上两个相邻箱脚的同一侧,即在纵骨架制的内底板架上,只需增加一道横向加强材,而不必在两侧均设置.以减轻空船重量和节省安装工时.图3是典型的双层底纵桁的位置,这样的布置能够保证只要对箱脚位置单面加强即可l置IIppr0nrr.21誊,(\,且/)1鲫(二)99-C]/③2NDDECK——/_—\ 卵5pR7s,~●'.一44=:——143=…一一——图2二甲板高度示例3里l1.●|.一\.,Ln叫ll/Cnt{J!R50'.I咀.一,f200I!●l1—'f}_一/l,,HI一X/64321[Jl己3965l5j399己j1470I图3典型的双层底纵桁的位置3_3水平桁位置的选择水平桁位置应与集装箱堆放时的箱高处相对应,同样应考虑到在首尾部因线型变化而形成台架时,增设垫板后的高度,因而应稍降低些.图4为水平桁的位置布置节点.保证水平桁高度为868X3,而集装箱高度为2591mm.可以确保箱脚位置与水平桁的对应.对于结构到首尾区域的变化(台阶的出现)也有很重要的意义.3.4纵骨间距的选择纵骨包含甲板纵骨,底部纵骨和舷侧纵骨等.显然纵骨问距必须与箱宽/箱高相配合.一般将箱高/宽三等分或四等分,约在610—860mm之间.所形成的板架尺寸较合理.另外应注意甲板纵骨与舷侧/纵壁间围成的空间不能太小,应留有足够的施工空间.3.5舱口围板纵向加强材的布置舱口围板离中和轴远,对中剖面模数的影响大.应予以充分利用.主甲板和舱口围区域的板厚通常会比较厚,对于大型集装箱船.此处的厚度有可能达到68mm以上.一般在舱口围板高度一半处加一道纵骨(对大船和高度允许条件下可设置二道).对增加剖面模数有好处.44高强度钢的选用高强度钢的选用能直接降低钢料重量.对减少空船重量十分有用.但从使用角度来讲会影响使用寿命,因为腐蚀对普通钢和高强度钢是同等的.一般在参于总纵强度部位采用高强度钢,特别是甲板,舷侧顶列板/纵舱壁顶板和舱口围板以及所设的纵骨. 可采用36kgf级,甚至40kgf级的高强度钢.因这些部位既能增大应力标准,而腐蚀的机会相对较小.对于底部要视船的大小与总纵强度具体情况而定.对于大船和超大型船,不仅底部而且舷侧/纵舱壁均要用高强度钢,只有这样才能保证足够的载重量和良好的经济性.5船体总纵强度的计算——静水弯矩裕度的选择集装箱船航速较高,船型瘦长,在海上汹涌的波涛中,船体承受弯曲(包括垂向和水平两个方向)和扭转力作用,特别是甲板上,舱MYt:M占去了大部32=r一一~—'l31!=—————130一—29lf肇]lr1日lJ一5THDECKr可一.,\~西050/27f…i一lI季,回.口S£LL口£1lII/三\J舀是\,/1√f√f.=.i毒,,BASELIN[2】19I81615}21400I19200166074]aO8a图4水平桁的位置布置份,边上仅有很窄的甲板板来承受这些力,应力十分巨大.另外,多港装卸时,港口部门为了缩短停泊时间和减少理货时间,往往将某港口需装卸的集装箱集中装载在一个舱内或甲板上,造成到港卸货后出现某--~(bay)整个空或少量装载的恶劣装载状态, 这对船舶的总纵强度将是严峻的考验.从而引出静水弯矩裕度的量化问题(德国劳氏船级社对此有一定的要求,具体要跟船级社沟通).应该说对定航线船可以通过统计资料来提供量的大小,对船东也可通过揽货的货品及各港口的需求量来确定.以前裕度一般在5-6%,现在建议取10%左右,甚至达到20%.视具体情况而定.6上层建筑纵问位置的选择过去集装箱船一般是艉机型船,上层建筑和驾驶室布置在尾部,甚至是极尾部(上层建筑前壁与艉尖壁对齐),机舱前部是具有大开口的货舱区.此种布置形式承受扭转能力差,特别是大型和超大型船舶.机舱前有7—8个货舱(15—16个货舱开口),长度在200米左右,在发生扭转变形时,变形量巨大,以致使舱口盖与舱口围板间的紧固装置被剪断,因此不得不采取必要的措施以增加结构强度,从而减少了装箱量.目前已有大型集装箱船将上层建筑布置在中部的设计,这不仅大大地改善了抗扭强度,而且由于上层建筑的自重也有效降低了集装箱船各种装载状态下的中拱弯矩.同时,它也改善了视线,有利于驾驶.更特出的是可以在它的下部布置燃油舱,从而顺利地解决了2007年8月1日即将生效的关于燃油舱不得与海水直接相邻的规定而引发的燃油舱布置问题.当然上层建筑前移导致舱内载箱量减少,但是由于前移后的上层建筑后面甲板上堆装层数的增加,以及视线改善使驾驶室前堆装的集装箱数增加足以抵消装箱量的减少,甚至还有一定的裕度C~,1-大型集装箱船而言).7结语本文针对集装箱船结构设计过程中出现的一些共性的问题进行了探讨,和其它类型的船舶一样,应该说集装箱船也有自己的特点,在实际设计中这些特点对于开发新型的集装箱船有一定的参考作用.集装箱船的设计,需要共性技术和个性技术的积极应用,使设计更加准确和快速.8参考文献[1】GermanJscherLloyd:RulesforClassificationandConstruc—don,I-Part1,Chapter1.5。
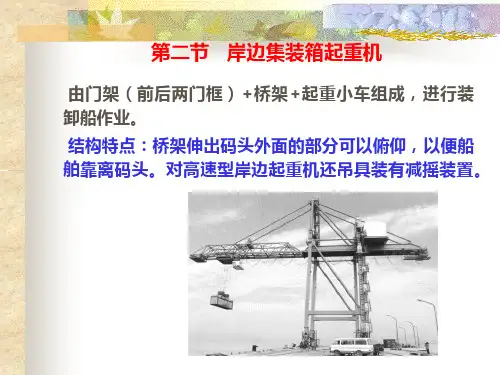
移动式装船机的工艺布置与构造特点中交第三航务工程勘察设计院有限公司沈卓沈燕娣上海海事大学王悦民摘要 :着重介绍了目前国内移动式装船机的工艺布置 , 类比了 2大类装船机的构造特点 , 分析了目前装船机的结构瓶颈 , 并提出了解决方案。
关键词 :装船机 ; 伸缩臂架 ; 溜管 ; 尾车Abstrac t :T his paper presents l ayout of do m esti c ex i sti ng movable sh i ploaders , compares t w o types of sh i p l oade rs i n structure , and then po ints out t he bo ttleneck from the srtuctures and g i ves solv i ng sche m esK eywords :shipl oader ; te l escop i c boom; chute ; ta il car在世界三大散货 (铁矿石、煤炭、粮食的运输过程中 , 装船机械是必不可少的环节 , 由于其体形小、机构相对简单 , 造价远低于卸船机 ,故而并未引起一线制造厂商的足够重视 , 装船机正在成为国内中小制造厂商甚至私营企业进入港口机械市场的试金石。
目前我国散货运输主要以铁矿石和煤炭为主 ,基本情况为 :(1 铁矿石需要大量进口 , 2005年达到 2 7亿 , t 长江及珠江流域约消耗总进口量的 60%。
10万 t 级以上的大船无法进入长江及珠江流域 , 大多需要减载至 5万 t 级以下的船型。
(2 煤炭主要为北煤南运 , 2005年国内海运量约 3 4亿 , t 国内运煤用船基本为 5万 t 级以下。
由此可以看出 , 我国装船机的任务主要就是针对 5万 t 级以下的船型 , 即护舷至溜管极限位置间距小于 25m, 伸缩距离小于 13m, 额定能力小于 5000t/h。
5
科考船的大小可以用
“排水量”来衡量,排水量
即排开的水的质量,被排开
的水会反过来给船舶同等的
浮力。
科考船的排水量从几
百吨到几万吨不等。
灵活的大手——电视抓斗
这是电视抓斗,它能轻松抓取大量的海底样品,还可以用自身携带的水下摄影机观察海底各种现象。
其实啊,科考船的诸多功能离不开它携带的仪器。
快
总结一下,我们介绍了多少仪器?你还想知道什么呢?
外摆中的A型架月池黑漆漆的,像口井 强壮的臂膀——A型架
由于它的外型酷似字母“A”,所以人们称之为A型架。
它一般在船尾待命,有任务时,它会先把设备吊起,然后带着设备外摆到水面,最后将设备放到海里。
“敏感”的内心——月池
这是月池,是科考船上的重要结构。
它通常装配在科考船的中央部分,看起来就像一口井,能直通海水,可以下放多种仪器。
了解了科考船的大致模样后,我们再来看看它的一些细节。
Copyright ©博看网. All Rights Reserved.。
SZJ1000A 型直线摆动式装船机结构特性
福州港务局陈宗生
近年来 , 国内外建筑行业对河沙的需求量逐渐增多 , 为适应这一市场变化 , 福州港新近投产了一座砂石散货码头。
采用了较为先进的散货装卸工艺 , 即 :驳船卸船机带式输送机堆场 (堆料机、取料机带式输送机装船机海船 , 形成每小时接卸 800t, 装船 1000t 河沙的生产能力。
装卸过程所采用的 SZJ1000A 型直线摆动式装船机生产率为 1000t/h, 其结构合理 , 生产率较高 , 试运行以来 , 工作正常 , 基本达到了设计要求。
下面简要介绍其结构特性。
1 装船工艺及单机主参数
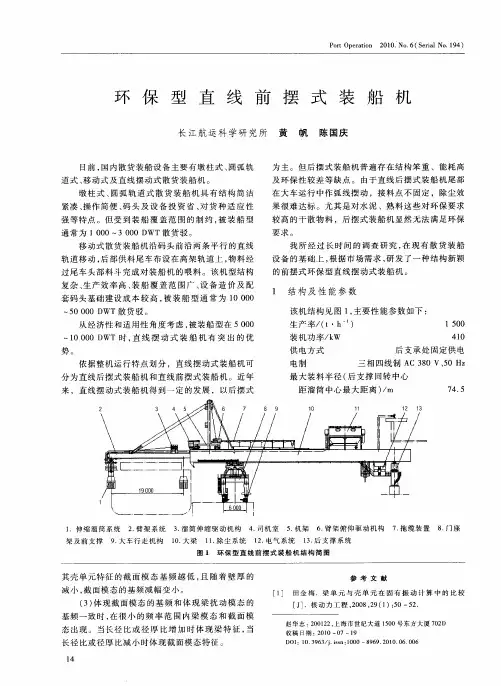
SZJ1000A 型直线摆动式装船机结构形式如图 1所示 , 在码头装船作业过程中 , 它承接后方堆场带式输送机送来的河沙 , 通过装船机上的带式输送机 10送入悬臂梁 2前端的溜筒 1, 将河砂装入海船。
该装船机连续作业 , 是一种比较适合于散货码头的
装船设备。
图 1 装船机结构示意图 1 溜筒机构 2 悬臂梁 3 司机室
4 门架拉杆系统
5 主梁
6 伸缩补偿变幅系统
7 机器房
8 后支承装置
9 伸缩系统10 带式输送机
11 运行系统 12 前支承装置 13 海船
福州港河砂码头受地理位置和地形的影响 , 后方堆场比较狭窄 , 码头前沿装船机既要满足大型船舶的装船需要 , 又要适应后方比较狭小的堆场 , 装船机前后支承跨度较大 , 普通结构形式的装船机不能
满足要求 , 该机采用直线摆动式结构 , 实践证明 , 这种方案是可行的 , 装船机主参数如下 :
生产率 1000t/h
物料 (河砂密度 1 5~1 7t/m 3 含水量 10%装机功率 240kW 主梁跨距 29~46m 运行范围 (摆动 ! 51∀伸缩行程 27m 悬臂变幅范围 0∀ ~25∀溜筒伸缩行程 12m 运行机构轨距 5m 最大轮压 25t 整机自重 290t
2 结构特性
(1 直线摆动为适应对 5000~20000t 船舶装砂和码头地形的需要 , 装船机结构采用了如图 2所示的直线摆动式 , 即其前支承装置由转盘、立柱、支腿和车轮等主要部件构成。
其功能是同后支承装置一起支承卸船机整体 , 并使装船机沿着码头前沿两条轨道直线运行 , 由两根箱形梁组成的主梁 3与前支承装置的转盘铰接。
后支承装置由滚轮、滚轮架、转盘和底座等构成 ,
底座是钢筋混凝土结
图 2 装船机工作摆动形式
1 前支承装置轨道中心线
2 后支承装置中心
3 主梁
4 前支承装置中心
5 悬臂梁
6 海船
#∃
构 , 其上方与后支承转盘相接 , 转盘上装有滚轮架 , 滚轮架上的 4个滚轮装配在主梁下面的轨道内 , 这样 , 主梁可在后支承装置的滚轮上前后自由伸缩。
由于滚轮架下是转盘 , 所以在主梁前后伸缩的同时还可以绕后支承中心左右摆动 , 其最大摆角为 ! 51∀。
在主梁摆动过程中 , 前后支承距离 (即跨距也在变化 , 当主梁中心线与码头轨道相垂直时 , 即跨距最短为 29m, 当主梁中心线绕后支承中心回转到最大摆角 ! 51∀时 , 装船机最大跨距为 46m 。
(2 悬臂梁伸缩为满足装船工作需要 , 悬臂梁采用了如图 3所示的可伸缩结构 , 悬臂梁 1的里端与伸缩小车 2铰接 , 伸缩驱动机构 5工作时 , 带动钢丝绳 4拖动伸缩小车 2在由两箱形梁组成的主梁 3中间的轨道上运行 , 从而拖动悬臂梁 1在主梁中间前后伸缩 , 实现在船舱横断面均匀装料。
在伸缩小车下方装有输送带的改向滚筒 , 当伸缩小车运行时 , 既拖动悬臂梁前后伸缩 , 又带动带式输送机同步伸缩 ,
从而保证带式输送机正常工作。
图 3 悬臂梁伸缩结构示意图 1 悬臂梁 2 伸缩小车 3 主梁
4 钢丝绳
5 驱动机构
(3 溜筒机构装船机的卸料装置采用了如图 4所示的溜筒机构 , 在提升绞车 1和电动推杆 3等工作机构的动作配合下 , 可实现溜筒卸料角度变化范围 0∀ ~45∀ ,
溜筒伸缩行程 12m, 溜筒绕其中心回转 ! 175∀ , 卸料口摆动 60∀ , 基本满足了向船舱各角
落装料的需要。
图 4 溜筒机构示意图 1 提升铰车 2 溜筒 3 电动推杆 4 回转支承
(4 物料输送系统装船机上的带式输送机是一条独立的 , 完整的河砂输送系统 , 布置在主梁和悬臂梁上 , 输送带宽 1m, 长约 171m, 从主梁后部接受堆场带式输送机来的河砂 , 将河砂送到悬臂梁前端的溜筒 , 中间没有其他的过渡衔接。
整机电气控制系统采用了先进可靠的 PLC 程
序控制 , 具有故障及运行状态监测功能 , 大大提高了电控系统的灵敏度和可靠性。
采用了电动夹轨器 , 结合前支承装置上的锚定装置和码头前沿的锚定坑 , 可以保证装船机在台风季节的安全。
作者 :陈宗生
地址 :福州市马尾区港口路 3号邮编 :350015收稿日期 :1999-04-19
新的企业划分标准将出台
据悉 , 我国已对现行的∃大中小型工业企业划分标准 %进行修订 , 新的标准即将出台。
新标准将统一按销售收入、资产总额和营业收入的多少归类 , 主要考察指标是销售收入和资产总额 , 划分依据是 1998年的统计数据。
新标准将结合我国的实际情况 , 参照一些国家标准及各类企业占企业总数的比重 , 对大、中、小型工业企业作如下划分 :
&大型企业的标准为年销售收入和资产总额均在 50亿元及以上。
其中 , 特大型企业的标准定为销售收入和资产总额均在 50亿元及以上。
∋中型企业的标准为年销售收入和资产总额均在 5000万元以上。
(除上述企业外 , 其余的均为小型企业。
按新的划分标准 , 在国家统计局同步掌握的 40多万家独立核算工业企业中 , 大、中、小型企业占全部独立核算工业企业的比例分别为 0 21%、 1 96%和 97 83%。
这一结构与一些发达国家的企业规模结构基本相近。
摘自∃中国财经报 %。