基于CPLD技术的CCD驱动电路的设计
- 格式:pdf
- 大小:207.01 KB
- 文档页数:3

目录1 技术指标 (1)2 设计方案及其比较 (1)2.1方案一 (1)2.2方案二 (2)2.3方案三 (2)2.4方案比较 (3)3 实现方案 (3)3.1 CPLD驱动板介绍 (3)3.2 TCD2252D简介 (4)3.3 最终实现方案 (4)4 调试过程及结论 (7)5 心得体会 (10)6 参考文献 (10)基于CPLD的彩色线阵CCD驱动信号的设计1技术指标查TCD2252D芯片手册分析各驱动信号的时序关系,结合CCD学习套件,能够基于QuartusII软件平台使用HDL语言编写逻辑时序,驱动线阵CCD正常工作,并能够实现外部信号控制驱动频率的变化,通过示波器能够观测到输出如图1的图像。
图1 CCD线阵驱动时序图2设计方案及其比较2.1方案一方案一为单片机驱动方法。
因为大多是CCD系统里都含有单片机,所以很自然的会联想到单片机的并行锁存输出口所需的驱动脉冲信号,实现对CCD的控制。
单片机靠指令产生I/O口的输出来实现。
由于线阵CCD的典型复位脉冲为1MHz,所以对单片机还是有一定的最低要求。
简易连接图如图2所示。
图2 单片机简易连线图为了获得精确的CCD驱动,最好不要使用循环制性程序。
因为转移指令是要根据某种条件产生的程序分支,而分支程序在不同条件下之行的指令周期数是不同的,因而造成CCD的驱动时序不准确。
但是对于成千的像元的CCD来说,一个工作周期往往需要好多好多字节的程序存储器。
略有麻烦。
2.2方案二方案二为EPROM驱动方法。
所需的器件TCD1208AP的时序如图3所示。
SH为光积分脉冲信号;1、2为时钟脉冲信号;RS为复位脉冲信号;SP为采样保持脉冲信号。
由图3中的时序可以看出:在这5个信号中,最窄的是AB段,即SP和RS两个信号的高电平部分,各个信号的任何部分都是AB段的倍数。
根据这一特点,将这组信号以AB段为基本单位划分为若干个等时间间隔,称为状态。
时钟波形电平变化发生在一定状态变化时刻,这样任意一路信号都被分为上万个状态,处于某一状态时,各路信号或1或0,构成一个状态的数据,将数据依次装入可擦除只读存储器EPROM中,只要等时间间隔地依次输出这些数据就形成了CCD所需的各路波形。
基于CPLD的CCD驱动时序电路设计
电荷耦合器件(CCD),是一种以电荷为信号载体的光电传感器。
他具
有光电转换,电荷存储,转移和检测等功能。
广泛应用于可编程逻辑器件(PLD)是在20 世纪80 年代迅速发展起来的一种新型集成电路,随着大规模集成电路的
进一步发展,出现了PAL 和GAL 逻辑器件,而复杂可编程逻辑器件CPLD 是
在此逻辑器件基础上发展起来的,跟分立元件相比,具有速度快、容量大、功
耗小、集成度高、可靠性强等优点。
故CPLD 被广泛应用于各种电路的设计中。
l TCDl200D 简介
1.1 TCDl200D 的特点
TCDl200D 是日本东芝公司生产的双沟道线阵CcD 器件,具有灵敏度高(饱和曝光量为0.037 x-s)、暗电流低等特点。
该器件具有2 160 个像元,内部信号预处理电路包含采样保持和输出预放大电路,当温度为25℃时,该器件工作
在5 V 驱动脉冲,12 V 电源条件下。
1.2 TCDl200D 驱动时序要求
芯片正常工作需要4 路驱动信号:时钟脉冲Fl,时钟脉冲F2,转移脉冲SH 和复位脉冲RS。
其中SH 为光电荷转移脉冲,其下降沿是每行输出的起始点;F1,F2 为两相交变驱动脉冲(相位差为90。
),其作用为驱动信号电荷进行
定向转移;RS 为输出极复位脉冲,清除输出即输出一个单元电荷后所剩电荷,
以保证下一个单元电荷电压的正确输出。
在4 路脉冲的正确驱动下,该
2 驱动电路设计与实现
2.1 驱动电路设计
本设计采用wZE-SPXO10.00 MHz 晶振作为系统标准时钟。
按照。


摘 要:本文介绍了利用复杂可编程器件(CPLD)设计TCD1501D 型线阵CCD 的一种驱动方法,同时可以通过单片机控制CPLD 实现CCD 能够根据外界环境自动调节积分时间,实现自适应。
关键词:CCD,CPLD;积分时间;自适应 中图分类号:TM307+.3 文献标识码:A DOI:10.3772/j.issn1009-5659.2008.14.008CCD(电荷耦合器件)的基本功能是将光学图像信号转变成一维以时间为变量的电压信号[1],广泛的应用于元件尺寸测量以及位置检测系统中[2]。
本课题背景是利用CCD 检测带材边缘的位置信息,为后续的控制系统提供数据。
在带钢轧制现场,光照强度浮动因数很多:例如,光源受污染;给光源供电的电压波动等都会造成光照条件的改变,影响测量的准确性,不利于提高系统的信噪比[3]。
为了提高系统的测量精度和抗干扰性,需要实时改变CCD 的光积分时间以补偿现场环境的影响。
本文以TCD1501D 型CCD 芯片为例,分析了芯片的工作过程和驱动芯片的各个信号的要求,阐述了CCD 驱动电路自适应的实现,最后给出了系统仿真结果。
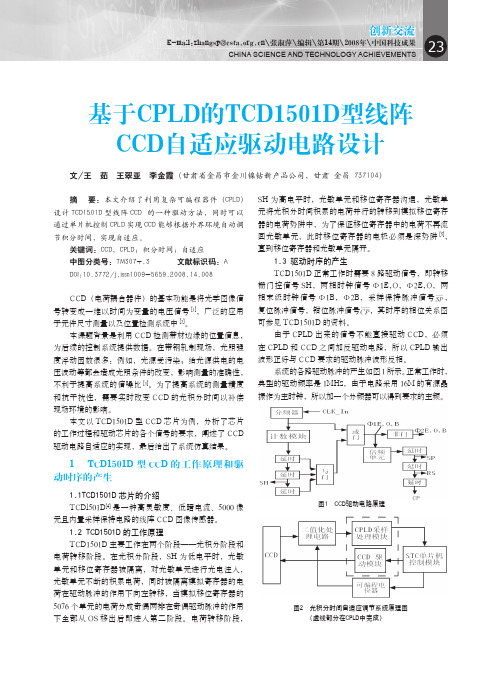
1 TCD1501D 型CCD 的工作原理和驱动时序的产生1.1TCD1501D 芯片的介绍TCDl501D [4]是一种高灵敏度、低暗电流、5000像元且内置采样保持电路的线阵CCD 图像传感器。
1.2 TCD1501D 的工作原理TCD1501D 主要工作在两个阶段——光积分阶段和电荷转移阶段。
在光积分阶段,SH 为低电平时,光敏单元和移位寄存器被隔离,对光敏单元进行光电注入,光敏单元不断的积累电荷,同时被隔离模拟寄存器的电荷在驱动脉冲的作用下向左转移,当模拟移位寄存器的5076个单元的电荷分成奇偶两排在奇偶驱动脉冲的作用下全部从OS 移出后即进入第二阶段。
电荷转移阶段,SH 为高电平时,光敏单元和移位寄存器沟通,光敏单元将光积分时间积累的电荷并行的转移到模拟移位寄存器的电荷势阱中,为了保证移位寄存器中的电荷不再流回光敏单元,此时移位寄存器的电极必须是深势阱[5],直到移位寄存器和光敏单元隔开。

收稿日期338 光电技术应用基于CPLD 的高速面阵CCD 驱动电路设计孔 渊,王世勇,崔洪洲,周起勃(中国科学院上海技术物理研究所,上海200083)摘 要: 着重介绍了基于CP LD 来设计产生高速面阵I A -D1CC D 芯片复杂驱动时序和整个CCD 相机的电子系统控制逻辑时序。
同时采用CCD 视频处理专用集成芯片处理CC D 输出信号,提高了图像信噪比,改善了图像质量。
使用结果表明:该硬件电路结构简单、成本低廉、可靠性高、功耗较低,并满足了工程项目小型化的要求。
关键词: 电荷耦合器件;可编程逻辑器件;驱动电路;CC D 视频处理专用集成芯片中图分类号: T N386.5 文献标识码: A 文章编号: 1001-5868(2003)05-0363-04Design of CPLD 2ba s ed High Speed Area Array CCD Driving CircuitK O NG Y uan ,W ANG Shi 2yong ,CUI H ong 2zh ou ,ZH OU Qi 2bo(Shangha i Institute o f Thechnica l Physi cs ,Chi nese Aca demy of Sci ences ,Shangha i 200083,C HN )Abstract : A design m ethod i s intr oduced for the com plex driving tim er of high speed area array CC D and for the c ontrol logic timer of the whole electr onic system of the CC D camera ,based on CP LD.At the same tim e ,the CC D output video signal w as pr ocessed by adopting s pecific integrated circuit (ASI C)for CCD vide o signal pr ocessing ,s o t hat both the signal 2to 2noise ration and the image quality are im pr oved.The result indicates that t he circuit is characterized by simple framew ork ,low l c ost ,high reliability ,and low power consumption ,which meet the demand of miniatur ization for the project.K ey w or ds : charge coupled device ;pr ogrammable logic device ;driving circuit ;s pecific i ntegrated circuit for CC D1 引言近几十年来,电荷耦合器件(CC D )在图像传感、信号处理、数字存储等领域取得了重大发展。
基于CPLD技术的线阵CCD驱动电路设计
蔡泽彬;蒋跃
【期刊名称】《空军预警学院学报》
【年(卷),期】2004(018)001
【摘要】针对以往设计的电荷耦合器件(CCD)驱动电路存在着体积大、易受干扰和工作频率低的缺点,设计出一种基于复杂可编程逻辑器件(CPLD)技术的CCD驱动电路,可用于不同型号的CCD,同时提高了整个系统的稳定性和工作的效率.仿真结果表明,该电路具有一定的实用价值.
【总页数】4页(P50-52,55)
【作者】蔡泽彬;蒋跃
【作者单位】空军雷达学院基础部,湖北,武汉,430019;空军雷达学院基础部,湖北,武汉,430019
【正文语种】中文
【中图分类】TN79
【相关文献】
1.基于CPLD的带电子快门功能线阵CCD驱动电路设计 [J], 赵光兴;赵雅
2.基于CPLD的线阵CCD驱动电路设计方法的研究与实现 [J], 胡丽;宋文爱;杨录
3.基于CPLD的线阵CCD驱动电路设计 [J], 何敏;王道平
4.基于CPLD的线阵CCD的驱动电路设计与实现 [J], 郭焱
5.基于CPLD和Verilog的高精度线阵CCD驱动电路设计 [J], 黄文林;扬光永;胡国清
因版权原因,仅展示原文概要,查看原文内容请购买。