LS-dyna 常见问题汇总1.0
- 格式:doc
- 大小:339.00 KB
- 文档页数:51
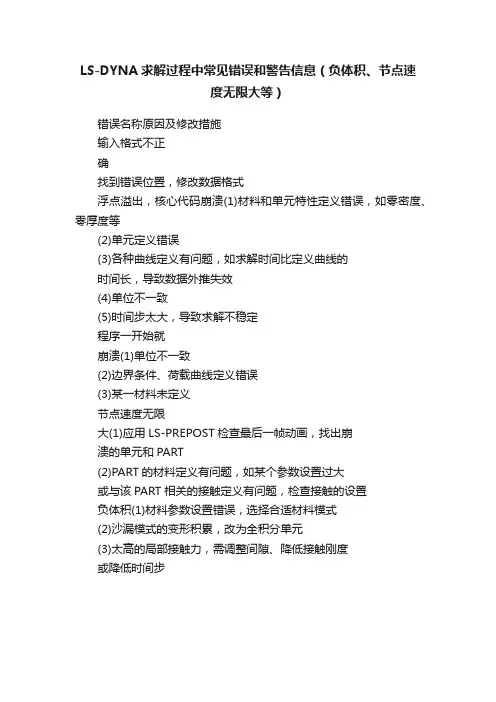
LS-DYNA求解过程中常见错误和警告信息(负体积、节点速
度无限大等)
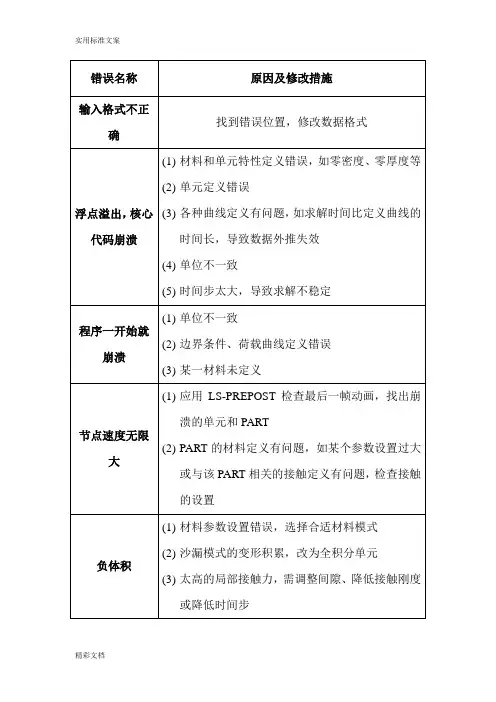
错误名称原因及修改措施
输入格式不正
确
找到错误位置,修改数据格式
浮点溢出,核心代码崩溃(1)材料和单元特性定义错误,如零密度、零厚度等
(2)单元定义错误
(3)各种曲线定义有问题,如求解时间比定义曲线的
时间长,导致数据外推失效
(4)单位不一致
(5)时间步太大,导致求解不稳定
程序一开始就
崩溃(1)单位不一致
(2)边界条件、荷载曲线定义错误
(3)某一材料未定义
节点速度无限
大(1)应用LS-PREPOST检查最后一帧动画,找出崩
溃的单元和PART
(2)PART的材料定义有问题,如某个参数设置过大
或与该PART相关的接触定义有问题,检查接触的设置
负体积(1)材料参数设置错误,选择合适材料模式
(2)沙漏模式的变形积累,改为全积分单元
(3)太高的局部接触力,需调整间隙、降低接触刚度
或降低时间步。
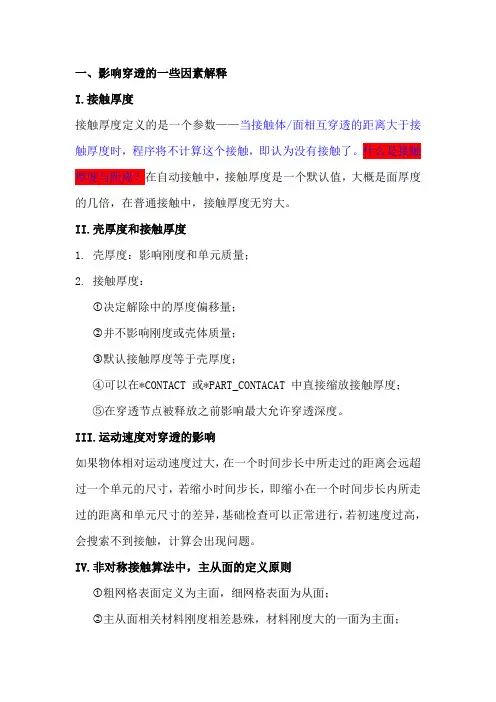
一、影响穿透的一些因素解释I.接触厚度接触厚度定义的是一个参数——当接触体/面相互穿透的距离大于接触厚度时,程序将不计算这个接触,即认为没有接触了。
什么是接触厚度与距离?在自动接触中,接触厚度是一个默认值,大概是面厚度的几倍,在普通接触中,接触厚度无穷大。
II.壳厚度和接触厚度1. 壳厚度:影响刚度和单元质量;2. 接触厚度:①决定解除中的厚度偏移量;②并不影响刚度或壳体质量;③默认接触厚度等于壳厚度;④可以在*CONTACT 或*PART_CONTACAT 中直接缩放接触厚度;⑤在穿透节点被释放之前影响最大允许穿透深度。
III.运动速度对穿透的影响如果物体相对运动速度过大,在一个时间步长中所走过的距离会远超过一个单元的尺寸,若缩小时间步长,即缩小在一个时间步长内所走过的距离和单元尺寸的差异,基础检查可以正常进行,若初速度过高,会搜索不到接触,计算会出现问题。
IV.非对称接触算法中,主从面的定义原则①粗网格表面定义为主面,细网格表面为从面;②主从面相关材料刚度相差悬殊,材料刚度大的一面为主面;③平直或者凹面为主面,凸面为从面。
V.接触刚度的影响穿透可以认为是一种虚拟穿透,如果设定的穿透刚度(fkn)值,就可以减小这种穿透,但却不可避免。
如果fkn 值过大,会使到那元刚度病态,而不能求解。
二、穿透的可能解决方案I.接触方面:1. 修改接触类型,尝试自动接触类型:①STS(面面接触),当一个体的表面穿透另外一个体的表面是创建②SS(单面接触),当一个体的表面自身接触或者接触另一个体的表面时创建2. 接触定义存在问题:①增加接触刚度因子②改变接触面的主从设置,将刚体设置为主面,同时使用单向接触③修改关键字CONTROL_CONTACT中RWPNAL=23. 接触穿透距离超过了接触厚度,从而不再计算接触;4. 如果两个接触体的材料属性和网格差别较大,可以修改SOFT值为1 或者2.5. 接触群组设置不直接用PART,将可能接触的地方设置为segment;6. 修改摩擦系数:Fs和Fd通常设置为相同的值,避免额外的噪声产生。
LS-DYNA常见问题汇总1.0资料来源:网络和自己的总结yuminhust2005Copyright of original English version owned by relative author. Chinese version owned by /Kevin目录1.Consistent system of units 单位制度 (2)2.Mass Scaling 质量缩放 (4)3.Long run times 长分析时间 (9)4.Quasi-static 准静态 (11)5.Instability 计算不稳定 (14)6.Negative Volume 负体积 (17)7.Energy balance 能量平衡 (20)8.Hourglass control 沙漏控制 (27)9.Damping 阻尼 (32)10.ASCII output for MPP via binout (37)11.Contact Overview 接触概述 (41)12.Contact Soft 1 接触Soft=1 (45)13.LS-DYNA中夹层板(sandwich)的模拟 (47)14. 怎样进行二次开发 (50)1.Consistent system of units 单位制度相信做仿真分析的人第一个需要明确的就是一致单位系统(Consistent Units)。
计算机只认识0&1、只懂得玩数字,它才不管你用的数字的物理意义。
而工程师自己负责单位制的统一,否则计算出来的结果没有意义,不幸的是大多数老师在教有限元数值计算时似乎没有提到这一点。
见下面LS-DYNA FAQ中的定义:Definition of a consistent system of units (required for LS-DYNA):1 force unit = 1 mass unit * 1 acceleration unit1 力单位=1 质量单位× 1 加速度单位1 acceleration unit = 1 length unit / (1 time unit)^21 加速度单位= 1 长度单位/1 时间单位的平方The following table provides examples of consistent systems of units.As points of reference, the mass density and Young‘s Modulus of steel are provided in each system of units. ―GRA VITY‖ is gravitational acceleration.2.Mass Scaling 质量缩放质量缩放指的是通过增加非物理的质量到结构上从而获得大的显式时间步的技术。
利用LSDYNA进行接触分析应该注意的一些问题
利用LSDYNA进行接触分析应该注意的一些问题
在定义材料特性时确保使用了协调单位。
不正确的单位将不仅决定材料的响应,而且影响材料的接触刚度。
确保模型中使用的材料数据是精确的。
大多数非线性动力学问题的精度取决于输入材料数据的质量。
多花点时间以得到精确的材料数据。
对所给模型选择最合适的材料模型。
如果不能确定某个part的物理响应是否应该包含某个特殊特性(例如:应变率效应),定义一种包含所有可能特点的材料模型总是最好的。
在两个接触面之间不允许有初始接触,确保在定义接触的地方模型没有任何重叠。
总是使用真实的材料特性和壳厚度值,接触面的材料特性和几何形状被用来决定罚刚度。
在相同的part之间不要定义多重接触。
对壳单元,除非需要接触力否则使用自动接触。
无论何时尽可能使用自动单面接触(ASSC),此接触是最容易定义的接触类型而不花费过多的CPU 时间。
在求解之前列示所定义的接触面以保证定义了合适的接触。
避免单点载荷,它们容易引起沙漏模式。
既然沙漏单元会将沙漏模式传给相邻的
单元,应尽可能避免使用点载荷。
在定义载荷曲线之后,使用EDLDPLOT 命令进行图形显示以确保其精确性.
因为LS-DYNA 可能会多算几个微秒,将载荷扩展至超过最后的求解时间(终止时间)常常是有用的。
对准静态问题,施加一个高于真实情况的速度常常是有利的,这能极大的缩减问
题的求解时间。
不允许约束刚体上的节点,所有的约束必须加在刚体的质心(通过EDMP,RIGID 命令)。
![LS-dyna-常见问题汇总2[1].0](https://uimg.taocdn.com/f6d44596dd88d0d233d46a44.webp)
实用标准文案
精彩文档 错误名称
原因及修改措施
输入格式不正确
找到错误位置,修改数据格式
浮点溢出,核心代码崩溃 (1) 材料和单元特性定义错误,如零密度、零厚度等
(2) 单元定义错误
(3) 各种曲线定义有问题,如求解时间比定义曲线的
时间长,导致数据外推失效
(4) 单位不一致
(5) 时间步太大,导致求解不稳定
程序一开始就
崩溃
(1) 单位不一致
(2) 边界条件、荷载曲线定义错误
(3) 某一材料未定义
节点速度无限
大
(1) 应用LS-PREPOST 检查最后一帧动画,找出崩
溃的单元和PART
(2) PART 的材料定义有问题,如某个参数设置过大
或与该PART 相关的接触定义有问题,检查接触
的设置
负体积
(1) 材料参数设置错误,选择合适材料模式
(2) 沙漏模式的变形积累,改为全积分单元
(3) 太高的局部接触力,需调整间隙、降低接触刚度
或降低时间步。
/viewthread.php?tid=68546LS-DYNA在1976年由美国劳伦斯·利沃莫尔国家实验室(Lawrence Livermore National Laboratory)J.O.Hallquist博士主持开发,时间积分采用中心差分格式,当时主要用于求解三维非弹性结构在高速碰撞、爆炸冲击下的大变形动力响应,是北约组织武器结构设计的分析工具。
LS-DYNA的源程序曾在北约的局域网PubicDomain公开发行,因此在广泛传播到世界各地的研究机构和大学。
从理论和算法而言,LS-DYNA是目前所有的显式求解程序的鼻祖和理论基础。
1988年,J.O.Hallquist创建利沃莫尔软件技术公司(Livermore Software Technology Corporation),LS-DYNA开始商业化进程,总体来看,到目前为止在单元技术、材料模式、接触算法以及多场耦合方面获得非常大的进步。
以下为LS-DYNA初学者常见的问题: 一、LS-DYNA与市面上其它的前处理软件兼容性如何?解答:由于LS-DYNA是全球使用率最高的结构分析软件,因此其它的前处理软件与LS-DYNA 是完全兼容的。
在此要强调的是:LS-DYNA的官方前处理程序为FEMB,因为FEMB是专门为LS-DYNA量身订作的前处理程序,有许多设定条件及架构逻辑是其它前处理软件所难望其项背的,为了避免在学习LS-DYNA的过程及操作上产生困扰,强烈建议使用者采用原厂出品的FEMB来做为LS-DYNA的前处理工具,使用者必定更能体会LS-DYNA 直觉式的设定与强大的分析能力。
.二、LS-DYNA似乎很重视「Contact Algorithm」,这是为什么?解答:是的,LS-DYNA很早以前就已经发展「接触算法」,这是因为基础力学所分析的对像均只考虑「力的受体」,故输入条件皆为外力量值。
在网格划分过程中,我们常遇到退化单元,如果不对它进行一定的处理,可能会对求解产生不稳定的影响。
在LS-DYNA中,同一Part ID 下既有四面体,五面体和六面体,则四面体,五面体既为退化单元,节点排列分别为N1, N2, N3, N4, N4, N4, N4, N4和N1, N2, N3, N4,N5, N5, N6, N6。
这样退化四面体单元中节点4有5倍于节点1-3的质量,而引起求解的困难。
其实在LS-DYNA的单元公式中,类型10和15分别为四面体和五面体单元,比退化单元更稳定。
所以为网格划分的方便起见,我们还是在同一Part ID 下划分网格,通过*CONTROL_SOLI关键字来自动把退化单元处理成类型10和15的四面体和五面体单元。
2 LS-DYNA中对于单元过度翘曲的情况有何处理方法有两种方法:1.采用默认B-T算法,同时利用*control_shell 控制字设置参数BWC= 1,激活翘曲刚度选项;2.采用含有翘曲刚度控制的单元算法,第10号算法。
该算法是针对单元翘曲而开发的算法,处理这种情况能够很好的保证求解的精度。
除了上述方法外,在计算时要注意控制沙漏,确保求解稳定。
3在ANSYS计算过程中结果文件大于8GB时计算自动中断,如何解决这个问题?解决超大结果文件的方案:1. 将不同时间段内的结果分别写入一序列的结果记录文件;2. 使用/assign 命令和重启动技术;以要求指定的结果记录文件都是新创建的文件,否则造成结果文件记录内容重复或混乱。
特别是,反复运行相同分析命令流时,在重复运行命令流文件之前一定要删除以前生成的结果文件序列。
具体操作方法和过程参见下列命令流文件的演示。
4 关于梁、壳单元应力结果输出的说明问题:怎样显示梁单元径向和轴向的应力分布图(我作的梁单元结果只有变形图DOFSOLUTIN -Translation ,但是没有stress等值线图,只有一种颜色)和壳单元厚度方向的应力、变形图(我们只能显示一层应力、变形,不知道是上下表层或中间层的结果)。
/viewthread.php?tid=68546LS-DYNA在1976年由美国劳伦斯·利沃莫尔国家实验室(Lawrence Livermore National Laboratory)J.O.Hallquist博士主持开发,时间积分采用中心差分格式,当时主要用于求解三维非弹性结构在高速碰撞、爆炸冲击下的大变形动力响应,是北约组织武器结构设计的分析工具。
LS-DYNA的源程序曾在北约的局域网PubicDomain公开发行,因此在广泛传播到世界各地的研究机构和大学。
从理论和算法而言,LS-DYNA是目前所有的显式求解程序的鼻祖和理论基础。
1988年,J.O.Hallquist创建利沃莫尔软件技术公司(Livermore Software Technology Corporation),LS-DYNA开始商业化进程,总体来看,到目前为止在单元技术、材料模式、接触算法以及多场耦合方面获得非常大的进步。
以下为LS-DYNA初学者常见的问题: 一、LS-DYNA与市面上其它的前处理软件兼容性如何?解答:由于LS-DYNA是全球使用率最高的结构分析软件,因此其它的前处理软件与LS-DYNA 是完全兼容的。
在此要强调的是:LS-DYNA的官方前处理程序为FEMB,因为FEMB是专门为LS-DYNA量身订作的前处理程序,有许多设定条件及架构逻辑是其它前处理软件所难望其项背的,为了避免在学习LS-DYNA的过程及操作上产生困扰,强烈建议使用者采用原厂出品的FEMB来做为LS-DYNA的前处理工具,使用者必定更能体会LS-DYNA 直觉式的设定与强大的分析能力。
.二、LS-DYNA似乎很重视「Contact Algorithm」,这是为什么?解答:是的,LS-DYNA很早以前就已经发展「接触算法」,这是因为基础力学所分析的对像均只考虑「力的受体」,故输入条件皆为外力量值。
1 如何处理LS-DYNA中的退化单元?在网格划分过程中,我们常遇到退化单元,如果不对它进行一定的处理,可能会对求解产生不稳定的影响。
在LS-DYNA中,同一Part ID 下既有四面体,五面体和六面体,则四面体,五面体既为退化单元,节点排列分别为N1,N2,N3,N4,N4,N4,N4,N4和N1,N2,N3,N4,N5,N5,N6,N6。
这样退化四面体单元中节点4有5倍于节点1-3的质量,而引起求解的困难。
其实在LS-DYNA的单元公式中,类型10和15分别为四面体和五面体单元,比退化单元更稳定。
所以为网格划分的方便起见,我们还是在同一Part ID下划分网格,通过*CONTROL_SOLID关键字来自动把退化单元处理成类型10和15的四面体和五面体单元。
2 LS-DYNA中对于单元过度翘曲的情况有何处理方法有两种方法:1. 采用默认B-T算法,同时利用*control_shell控制字设置参数BWC=1,激活翘曲刚度选项;2. 采用含有翘曲刚度控制的单元算法,第10号算法。
该算法是针对单元翘曲而开发的算法,处理这种情况能够很好的保证求解的精度。
除了上述方法外,在计算时要注意控制沙漏,确保求解稳定。
3 在ANSYS计算过程中结果文件大于8GB时计算自动中断,如何解决这个问题?解决超大结果文件的方案:1. 将不同时间段内的结果分别写入一序列的结果记录文件;2. 使用/assign命令和重启动技术;3. ANSYS采用向指定结果记录文件追加当前计算结果数据方式使用/assign指定的文件,所以要求指定的结果记录文件都是新创建的文件,否则造成结果文件记录内容重复或混乱。
特别是,反复运行相同分析命令流时,在重复运行命令流文件之前一定要删除以前生成的结果文件序列。
具体操作方法和过程参见下列命令流文件的演示。
4关于梁、壳单元应力结果输出的说明问题:怎样显示梁单元径向和轴向的应力分布图(我作的梁单元结果只有变形图DOF SOLUTIN –Translation,但是没有stress等值线图,只有一种颜色)和壳单元厚度方向的应力、变形图(我们只能显示一层应力、变形,不知道是上下表层或中间层的结果)。
几乎看了本版块所有关于转动的讨论,现在终于对刚体的转动彻底的了解了,现在把前一段时间的心得拿出来,希望能对和我一样正在为这个问题迷茫的人有所帮助,以下两个文件是用ansys命令流写的,因为关于转动的k文件在“关于刚体转动的问题”这个主题里面已经讨论的很清除了,相信有很多人都是用ansys做前处理和后处理的,所以即使看懂了k文件,也未必就知道用ansys的前处理怎么来实现。
关于刚体转动,主要要注意以下几点:1. 如果是绕自己的质心转动,那很简单,不用设转动惯量和转动轴,因为ls-dyna默认就是绕着质心转动的。
2.如果是绕任意轴转动,那么就必须设新的质心center、惯性张量和转动轴。
这主要是用edlcs和edipart两个命令来实现,前一个设转动轴,后一个设center和惯性张量,关于惯性张量可以用solidworks来计算(wswu在那个主题曾提到这个方法),当然惯性张量也可以自己估算,如果质量体相对坐标轴比较远就可以把质量体当作集中质量,比如计算IXY=m*x*y(x和y是把质量中心投影到xy 平面后的那个点距x和y的距离)。
有人曾提到惯性张量可以随便给,当然随便给可能能算出结果来,但是那个结果可能并不是你所想要的结果,所以,如果是针对课题,这些东西不妨花点时间,弄出一个确定的值。
其实也没有什么太多要注意的,以上两点都做好了,你肯定就ok了。
我这两个文件借助了iamaxelong提出的用刚体带动弹性体的方法,因为iamaxelong老大那个ansys命令流贴在网页上被弄了一些乱码在里面,复制过来之后要做大量的修改,而且分析所需要的时间太长,所以我这里整了一个特别简单的例子,我的电脑分析只需要1分钟,可以帮助你快速看到分析的结果,相信即使比我还菜的人也能很快了解刚体转动的问题啦。
/PREP7!定义单元和材料ET,1,SOLID164MP,DENS,1,7800MP,EX,1,2.1e11MP,NUXY,1,0.3EDMP,RIGI,2,7,4MP,DENS,2,7800MP,EX,2,2.1e11MP,NUXY,2,0.3!画刚体和弹性体的实体模型BLOCK,-0.1,0.1,0.4,0.6,0,0.05,BLOCK,-0.05,0.05,0.45,0.55,0.05,0.1,KWPAVE, 9wpro,,90.000000,VSBW, 1KWPAVE, 10VSBW, 3VGLUE,all!确定实体模型上线条的网格密度LESIZE,all,0.025, , , , , , ,1lesize,11,,,2lesize,12,,,2lesize,31,,,2lesize,32,,,2lesize,9,,,2lesize,10,,,2lesize,39,,,2lesize,40,,,2lesize,21,,,2lesize,22,,,2lesize,23,,,2lesize,24,,,2numcmp,volu!划分单元vsweep,2vsweep,3vsweep,4mat,2vsweep,1!建立partedpart,create!定义载荷数组*DIM,time,ARRAY,2,1,1, , ,*SET,TIME(2,1,1) , 10*DIM,wz,ARRAY,2,1,1, , ,*SET,WZ(1,1,1) , 5*SET,WZ(2,1,1) , 5!加载EDLOAD,ADD,RBOZ,0, 2,TIME,WZ, 0, , , , ,!定义分析选项FINISH/SOLTIME,0.5,EDRST,30,EDHTIME,50,EDDUMP,1,EDENERGY,1,1,1,1/STATUS,SOLUSOLVE!输出动画FINISH/POST1SET,LAST/DSCALE,1,1.0/REPLOTPLDI, ,ANTIME,50,0.1, ,1,2,0,0FINISH/PREP7!定义单元和材料ET,1,SOLID164MP,DENS,1,7800MP,EX,1,2.1e11MP,NUXY,1,0.3EDMP,RIGI,2,7,4MP,DENS,2,7800MP,EX,2,2.1e11MP,NUXY,2,0.3!画刚体和弹性体的实体模型BLOCK,-0.1,0.1,0.4,0.6,0,0.05, BLOCK,-0.05,0.05,0.45,0.55,0.05,0.1,KWPAVE, 9wpro,,90.000000,VSBW, 1KWPAVE, 10VSBW, 3VGLUE,all!确定实体模型上线条的网格密度LESIZE,all,0.025, , , , , , ,1 lesize,11,,,2lesize,12,,,2lesize,31,,,2lesize,32,,,2lesize,9,,,2lesize,10,,,2lesize,39,,,2lesize,40,,,2lesize,21,,,2lesize,22,,,2lesize,23,,,2lesize,24,,,2numcmp,volu!划分单元vsweep,2vsweep,3vsweep,4mat,2vsweep,1!建立partedpart,create!定义载荷数组*DIM,time,ARRAY,2,1,1, , ,*SET,TIME(2,1,1) , 10*DIM,wz,ARRAY,2,1,1, , ,*SET,WZ(1,1,1) , 5*SET,WZ(2,1,1) , 5!自定义质心和旋转轴!质心定义在原点,模型本来的质心不在原点*DIM,center,ARRAY,3,1,1, , ,!定义惯性张量,反应了实体的质量相对自定义质心的分布*DIM,II,ARRAY,6,1,1, , ,*SET,II(1,1,1) , 1.1*SET,II(4,1,1) , 0.02475*SET,II(5,1,1) , 0.165*SET,II(6,1,1) , 1.1edipart,2,add,center,4.4,,II!定义旋转轴EDLCS,ADD,11,0,0,0,0,0,10,0,0,0,!加载EDLOAD,ADD,RBOZ,11, 2,TIME,WZ, 0, , , , ,!定义分析选项FINISH/SOLTIME,0.5,EDRST,30,EDHTIME,50,EDDUMP,1,EDENERGY,1,1,1,1/STATUS,SOLUSOLVE!输出动画FINISH/POST1SET,LAST/DSCALE,1,1.0/REPLOTPLDI, ,ANTIME,50,0.1, ,1,2,0,0FINISH用关键字 *INITIAL_VELOCITY_GENERATION 可以实现。
LS-DYNA FAQ 中英文版-Negative Volume 负体积2007年09月13日星期四下午 10:26泡沫材料的负体积(或其它软的材料)对于承受很大变形的材料,比如说泡沫,一个单元可能变得非常扭曲以至于单元的体积计算得到一个负值。
这可能发生在材料还没有达到失效标准前。
对一个拉格朗日(Lagrangian)网格在没有采取网格光滑(mesh smoothing)或者重划分(remeshing)时能适应多大变形有个内在的限制。
LS-DYNA中计算得到负体积(negative volume)会导致计算终止,除非在*control_timestep卡里面设置ERODE选项为1,而且在*control_termination里设置DTMIN项为任何非零的值,在这种情况下,出现负体积的单元会被删掉而且计算继续进行(大多数情况)。
有时即使ERODE和DTMIN换上面说的设置了,负体积可能还是会导致因错误终止。
有助于克服负体积的一些方法如下:* 简单的把材料应力-应变曲线在大应变时硬化。
这种方法会非常有效。
* 有时候修改初始网格来适应特定的变形场将阻止负体积的形成。
此外,负体积通常只对非常严重的变形情况是个问题,而且特别是仅发生在像泡沫这样的软的材料上面。
* 减小时间步缩放系数(timestep scale factor)。
缺省的0.9可能不足以防止数值不稳定。
* 避免用全积分的体单元(单元类型2和3),它们在包含大变形和扭曲的仿真中往往不是很稳定。
全积分单元在大变形的时候鲁棒性不如单点积分单元,因为单元的一个积分点可能出现负的Jacobian而整个单元还维持正的体积。
在计算中用全积分单元因计算出现负的Jacobian而终止会比单元积分单元来得快。
* 用缺省的单元方程(单点积分体单元)和类型4或者5的沙漏(hourglass)控制(将会刚化响应)。
对泡沫材料首先的沙漏方程是:如果低速冲击type 6,系数1.0; 高速冲击type 2或者3。
计算不稳定,通常包括:“out-of-range velocities” 速度超出范围
“negative volume in brick element” 体单元负体积
“termination due to mass increase” 因质量增加而终止
1.查看属性、材料。
保证材料的单位制没错。
2.接触有问题
3.初始穿透
4.局部细化网格
5.稍微移动速度过高处的节点,或者remesh
6.控制卡片保证正确
7.单元类型和/或沙漏控制:对出现不稳定的shell(solid)单元,试着用沙漏控制
type4和沙漏系数0.05,或者试着使用全积分16号单元,局部沙漏控制用type8
8.Control Contact卡片
9.减小时间步长(减小缩放系数,并使用质量缩放)
10.试着用双精度版本计算
11.接触:设置接触的bucket sorts之间周期数为0,这样会使用缺省的分类间隔。
如果参与接触的两个部件的相对速度异常的大,可能需要减小bucket sort的间隔(比如减小到5,2甚至1)。
如果仿真过程中有明显的接触穿透出现,转换到使用
*contact_automatic_surface_to_surface或者*contact_automatic_single_surface,并设置SOFT=1。
确保几何考虑了壳单元的厚度。
如果壳非常薄,比如小于1mm,放大或者设置接触厚度到一个更加合理的值。
避免冗余的接触定义,也就是说不要对同样的两个部件定义多于一个的接触对。
12.关掉所有的*damping。
lsdyna常见问题汇总LYDYNA能量平衡GLSTAT(参见*database_glstat)⽂件中报告的总能量是下⾯⼏种能量的和:内能internal energy动能kinetic energy接触(滑移)能contact(sliding) energy沙漏能houglass energy系统阻尼能system damping energy刚性墙能量rigidwall energyGLSTAT 中报告的弹簧阻尼能”Spring and damper energy”是离散单元(discrete elements)、安全带单元(seatbelt elements)内能及和铰链刚度相关的内能(*constrained_joint_stiffness…)之和。
⽽内能”Internal Energy”包含弹簧阻尼能”Spring and damper energy”和所有其它单元的内能。
因此弹簧阻尼能”Spring and damper energy”是内能”Internal energy”的⼦集。
由SMP 5434a 版输出到glstat ⽂件中的铰链内能”joint internal energy”跟*constrained_joing_stiffness 不相关。
它似乎与*constrained_joint_revolute(_spherical,etc)的罚值刚度相关连。
这是SMP 5434a 之前版本都存在的缺失的能量项,对MPP 5434a 也⼀样。
这种现象在⽤拉格朗⽇乘⼦(Lagrange Multiplier)⽅程时不会出现。
与*constrained_joint_stiffness 相关的能量出现在jntforc ⽂件中,也包含在glstat ⽂件中的弹簧和阻尼能和内能中。
回想弹簧阻尼能”spring and damper energy”,不管是从铰链刚度还是从离散单元⽽来,总是包含在内能⾥⾯。
DYNAFORM问题总集51-100GDYU_YU整理51、关于one step solver/thread-199993-1-83.html(wdjsc,2004-3-14)one step solver是用来干什么的?如果想在成形过程中进行压力加载,可不可以使用这种方法,也就是在计算一段时间后,停下来进行加载,再接着进行计算?A:(JackGu0214)one step solver 可以用来反算毛坯形状和尺寸,不知道还有没有其他用处?Q:(wdjsc)如果我想在成形过程中进行压力加载,可不可以使用这种方法,也就是在计算一段时间后,停下来进行加载,再接着进行计算?52、运行dynaform中的ls-dyna出现的问题/thread-94289-1-83.html(fenny,2003-7-18)我用dynaform1.01版随软件带的例子进行分析(完全按照training manual给出的步骤进行),运行ls-dyna时总出现下图所示情况,请教怎么回事?A:(mehere)正常,你采用的是自适应网格。
(fang_simon)你的内存太小了!给它运算的内存容量大一点就可以了。
(comma)所需的内存是字节单位的。
fang_simon在哪看出来内存缺来着?那个界面是典型的网格自适应的表示。
(zerorain)我做过,是不是刚提交一会儿就结束了?是分配给dynaform的内存不合理。
如果你的内存是128M,在Run ls-dyna设置里,把memory设为63M较合适;256M的内存,设置成128M。
(lq_liuqiang)这个问题跟内存没有多大的问题,是你采用了自适应网格。
(goldao)message中这种问题会有记录的。
(iamacat?)是否应增加系统的虚拟内存?(kesuliu)没问题,如果非正常退出,copy你的message文件。
(JackGu0214)message文件里并没有说问题出在哪里,请教在分析问题的时候主要看那些信息?(ahyoung)别管它,只要能往下计算就行。
1 如何处理LS-DYNA中的退化单元?在网格划分过程中,我们常遇到退化单元,如果不对它进行一定的处理,可能会对求解产生不稳定的影响。
在LS-DYNA中,同一Part ID 下既有四面体,五面体和六面体,则四面体,五面体既为退化单元,节点排列分别为N1,N2,N3,N4,N4,N4,N4,N4和N1,N2,N3,N4,N5,N5,N6,N6。
这样退化四面体单元中节点4有5倍于节点1-3的质量,而引起求解的困难。
其实在LS-DYNA的单元公式中,类型10和15分别为四面体和五面体单元,比退化单元更稳定。
所以为网格划分的方便起见,我们还是在同一Part ID下划分网格,通过*CONTROL_SOLID关键字来自动把退化单元处理成类型10和15的四面体和五面体单元。
2 LS-DYNA中对于单元过度翘曲的情况有何处理方法有两种方法:1. 采用默认B-T算法,同时利用*control_shell控制字设置参数BWC=1,激活翘曲刚度选项;2. 采用含有翘曲刚度控制的单元算法,第10号算法。
该算法是针对单元翘曲而开发的算法,处理这种情况能够很好的保证求解的精度。
除了上述方法外,在计算时要注意控制沙漏,确保求解稳定。
3 在ANSYS计算过程中结果文件大于8GB时计算自动中断,如何解决这个问题?解决超大结果文件的方案:1. 将不同时间段内的结果分别写入一序列的结果记录文件;2. 使用/assign命令和重启动技术;3. ANSYS采用向指定结果记录文件追加当前计算结果数据方式使用/assign指定的文件,所以要求指定的结果记录文件都是新创建的文件,否则造成结果文件记录内容重复或混乱。
特别是,反复运行相同分析命令流时,在重复运行命令流文件之前一定要删除以前生成的结果文件序列。
具体操作方法和过程参见下列命令流文件的演示。
4关于梁、壳单元应力结果输出的说明问题:怎样显示梁单元径向和轴向的应力分布图(我作的梁单元结果只有变形图DOF SOLUTIN –Translation,但是没有stress等值线图,只有一种颜色)和壳单元厚度方向的应力、变形图(我们只能显示一层应力、变形,不知道是上下表层或中间层的结果)。
LS-DYNA常见问题汇总1.0资料来源:网络和自己的总结yuminhust2005Copyright of original English version owned by relative author. Chinese version owned by /Kevin目录1.Consistent system of units 单位制度 (2)2.Mass Scaling 质量缩放 (4)3.Long run times 长分析时间 (9)4.Quasi-static 准静态 (11)5.Instability 计算不稳定 (14)6.Negative Volume 负体积 (17)7.Energy balance 能量平衡 (20)8.Hourglass control 沙漏控制 (27)9.Damping 阻尼 (32)10.ASCII output for MPP via binout (37)11.Contact Overview 接触概述 (41)12.Contact Soft 1 接触Soft=1 (45)13.LS-DYNA中夹层板(sandwich)的模拟 (47)14. 怎样进行二次开发 (50)1.Consistent system of units 单位制度相信做仿真分析的人第一个需要明确的就是一致单位系统(Consistent Units)。
计算机只认识0&1、只懂得玩数字,它才不管你用的数字的物理意义。
而工程师自己负责单位制的统一,否则计算出来的结果没有意义,不幸的是大多数老师在教有限元数值计算时似乎没有提到这一点。
见下面LS-DYNA FAQ中的定义:Definition of a consistent system of units (required for LS-DYNA):1 force unit = 1 mass unit * 1 acceleration unit1 力单位=1 质量单位× 1 加速度单位1 acceleration unit = 1 length unit / (1 time unit)^21 加速度单位= 1 长度单位/1 时间单位的平方The following table provides examples of consistent systems of units.As points of reference, the mass density and Young‘s Modulus of steel are provided in each system of units. ―GRA VITY‖ is gravitational acceleration.2.Mass Scaling 质量缩放质量缩放指的是通过增加非物理的质量到结构上从而获得大的显式时间步的技术。
在一个动态分析中,任何时候增加非物理的质量来增大时间步将会影响计算结果(因为F=ma)。
有时候这种影响不明显,在这种情况下增加非物理的质量是无可非议的。
比如额外的质量只增加到不是关键区域的很少的小单元上或者准静态的分析(速度很小,动能相对峰值内能非常小)。
总的来说,是由分析者来判断质量缩放的影响。
你可能有必要做另一个减小或消除了质量缩放的分析来估计质量增加对结果的灵敏度。
你可以通过人工有选择的增加一个部件的材料密度来实现质量缩放。
这种手动质量缩放的方法是独立于通过设置*Control_timestep卡DT2MS项来实现的自动质量缩放。
当DT2MS设置为一个负值时,质量只是增加到时间步小于TSSFAC*|DT2MS|的单元上。
通过增加这些单元的质量,它们的时间达到TSSFAC*|DT2MS|。
有无数种TSSFAC和DT2MS的组合可以得到同样的乘积,因而有相同的时间步,但是对于每一种组合增加的质量将是不一样的。
一般的趋势是TSSFAC越小,增加的质量越多。
作为回报,当TSSFAC减小时计算稳定性增加(就像在没有做质量缩放的求解中一样)。
如果TSSFAC缺省的值0.9会导致稳定性问题,可以试试0.8或者0.7。
如果你减小TSSFAC,你可以相应增加|DT2MS|,这样还是可以保证时间步乘积不变。
为了确定什么时候和位置质量自动增加了,可以输出GLSTAT和MATSUM 文件。
这些文件允许你绘出完整的模型或者单独部件所增加的质量对时间的曲线。
为了得到由壳单元组成的部件增加的质量云图,将*database_extent_binary 卡的STSSZ项设置为3。
这样你可以用ls-prepost绘出每个单元的质量增加量的云图,具体方法是通过选择Fcomp>Misc>time step size。
在*control_timestep中设置DT2MS正值和负值的不同之处如下:负值:初始时间步将不会小于TSSFAC*-DT2MS。
质量只是增加到时间步小于TSSFAC*|DT2MS|的单元上。
当质量缩放可接受时,推荐用这种方法。
用这种方法时质量增量是有限的。
过多的增加质量会导致计算任务终止。
正值:初始时间将不会小于DT2MS。
单元质量会增加或者减小以保证每一个单元的时间步都一样。
这种方法尽管不会因为过多增加质量而导致计算终止,但更难以作出合理的解释。
*control_timestep卡中的参数MS1ST控制是否只是在初始化时增加一次质量(MS1ST=1)还是任何需要维持由DT2MS所指定的时间步时都增加质量(MS1ST=0)。
你可以通过在*control_termination卡片中设置参数ENDMAS来控制当质量增加到初始质量一定比率时终止计算(只对自动质量缩放有效)--------------------------可变形点焊梁的质量缩放*mat_spotweld卡的质量缩放参数DT只影响点焊单元。
如果*control_timestep 卡中没有指定质量缩放(DT2MS=0),而且时间由可变形点焊控制,可以用参数DT来在初始化时增加惯量到点焊单元上来提高时间步达到DT指定的值。
当DT 不为0时,增加到可变形点焊梁元上的质量会输出到d3hsp文件里。
MATSUM 中动量和动能不受增加到可变形点焊上的质量的影响。
GSLTAT中DOES和总的KE受增加的质量的影响。
考虑三种调用可变形点焊的质量缩放的情况:1.当DT2MS为负值*mat_spotweld卡DT=0时,尽管在d3hsp文件中可变形点焊质量增量百分比不真实。
下面几个值是正确的:d3hsp中‖added spotweld mass‖;第一个时间步之后的‖added mass‖& ―percentage increase‖;glstat和matsum中的‖added mass‖。
2. 当DT2MS为负值且*mat_spotweld卡DT≠0时,可变形点焊质量增加不会包含在d3hsp、glstat、matsum文件中的‖added mass‖里。
这非常容易令人误解。
用户必须检查d3hsp文件的‖added spotweld mass‖。
建议不要同时使用两种质量缩放标准,推荐使用第一种方法(即负的DT2MS&DT=0)。
3. 如果DT2MS=0且DT≠0,初始时间步将不考虑增加点焊的质量,但是之后每一个周期时间步都会增加10%,直到时间步达到正确的值(考虑点焊质量增加)。
glstat & matsum不包含‖added mass‖的行。
注意质量增加会引起能量比率增长。
English Version:Mass-scaling refers to a technique whereby nonphysical mass is added to a structure in order to achieve a larger explicit timestep.Anytime you add nonphysical mass to increase the timestep in a dynamic analysis, you affect the results (think of F = ma). Sometimes the effect is insignificant and in those cases adding nonphysical mass is justifiable. Examples of such cases may include the addition of mass to just a few small elements in a noncritical area or quasi-static simulations where the velocity is low and the kinetic energy is very small relative to the peak internal energy. In the end, it‘s up to the judgement of the analyst to gage the affect of mass scaling. You may have to reduce or eliminate mass scaling in a second run to gage the sensitivity of the results to the amount of mass added.One can employ mass scaling in a selective manner by artificially increasing material density of the parts you want to mass-scale. This manual form of mass scaling is done independently of the automatic mass scaling invoked with DT2MS in *control_timestep.When DT2MS is input as a negative value, mass is added only to those elements whose timestep would otherwise be less than TSSFAC * |DT2MS|. By adding mass to these elements, their timestep becomes equal to TSSFAC * |DT2MS|. An infinite number of combinations of TSSF and DT2MS will give the same product and thus the same timestep but the added mass will be different for each of those combinations. The trend is that the smaller the TSSF, the greater the added mass. In return, stability may improve as TSSF is reduced (just as in non-mass-scaled solutions). If stability is a problem with the default TSSF of 0.9, try 0.8 or 0.7. If you reduce TSSF, you can increase |DT2MS| proportionally so that the product/timestep is unchanged.To determine where and when mass is automatically added, write GLSTAT and MATSUM files. These files will allow you to plot added mass vs. time for the complete model and for individual parts, respectively. To produce fringe plots of added mass in parts comprised of shell elements (DT2MS negative), set STSSZ=3 in *database_extent_binary. You can then fringe the added mass (per element) using LS-POST by choosing Fcomp > Misc > time step size. (Here, the label ―time stepsize‖ is really the element added mass.)The difference between using a positive or negative number for DT2MS in *control_timestep is as follows:Negative: Initial time step will not be less than TSSF * -DT2MS. Mass is added to only those elements whose timestep would otherwise be less than TSSF*abs(DT2MS). When mass scaling is appropriate, I recommend this method. The amount of mass that can be added using this method is limited. ‗Excessive‘ added mass will cause the job to terminate.Positive: Initial time step will not be less than DT2MS. Mass is added OR TAKEN AWAY from elements so that the timestep of every element is the same. This method is harder to rationalize although it is not subject to termination from ‗excessive‘ added mass.The parameter MS1ST in *control_timestep controls whether mass is added only once during initialization (MS1ST=1) or anytime as necessary to maintain the desired timestep specified via DT2MS (MS1ST=0).You can use ENDMAS in *control_termination to stop the calculation after a certain amount of mass has been added (active for automatic mass scaling only)._____________________________________________________________________ Mass-scaling of deformable spotweld beams:The mass-scaling parameter in *mat_spotweld (DT) affects only the spotwelds. If no mass-scaling is invoked in *control_timestep (DT2MS=0.) AND the timestep is controlled by the deformable spotwelds, DT can be used to add inertia to the spotwelds during intialization in order to increase the timestep to a value of DT. When DT is nonzero, mass added to spotweld beams is reported to d3hsp. MATSUM momentum and KE does NOT factor in added mass to def. spotwelds. GLSTAT DOES factor in added mass to total KE (spotweld.beam.type9.mscale.initvel.k) Consider 3 cases of invoking mass-scaling in a model with deformable spotwelds:1.Although ―percentage mass increase‖ under ―Deformable Spotwelds:‖ in d3hsp is bogus when DT2MS is neg. and DT in *mat_spotweld = 0, the following arecorrect:―added spotweld mass‖ in d3hsp―added mass‖ and ―percentage increase‖ in d3hsp AFTER the first time step―a dded mass‖ in glstat and matsum2. Added spotweld mass controlled by DT in *mat_spotweld is NOT INCLUDED in ―added mass‖ given in d3hsp, glstat, or matsum when DT2MS is neg. and DT in *mat_spotweld is nonzero. This can be quite misleading. User must check for ―added spotweld mass‖in d3hsp. Recommended: Do not invoke both mass-scaling criteria. Neg. DT2MS with DT=0 (case 1 above) is preferred.3. If DT is nonzero and DT2MS=0, the initial timestep will NOT consider added spotweld mass but the time step will increase by 10% each cycle until the correct timestep (considering added spotweld mass) is achieved. Glstat and matsum contain no ―added mass‖ line item.The above can be illustrated using/j5000a_2/jday/test/weld/spotweld.beam.type9.mscale.k._____________________________________________________________________ Note that added mass may cause the energy ratio to rise.(See /j5000a_2/jday/test/erode/taylor.mat3.noerode.mscale.k)3.Long run times 长分析时间当用显式时间积分时,对于仿真非常小的部件而分析时间又要相当长时没有好的方法。