自动扶梯桁架系统的快速设计
- 格式:pdf
- 大小:348.78 KB
- 文档页数:5
摘要自动扶梯是一种常年运载乘客的电力驱动设备,其运行状态常出现空载,大多数扶梯在空载时仍采用额定速度运行,具有耗能大,机械磨损严重等缺点,因此需要对自动扶梯进行节能运行改造。
本设计就是根据自动扶梯节能使用的基本要求,设计一种以微机与变频器相结合控制自动扶梯节能运行的系统。
工艺要求在保证舒适安全运行的条件下能够降低自动扶梯的能耗,延长自动扶梯的工作寿命。
自动扶梯控制系统的设计过程中主要包括电动机、热继电器、主电源开关、接触器、变压器、电线及电缆和制动电阻选型的基础上对于变频器驱动、电源控制、制动、故障显示、检修控制、速度检测、安全控制、照明控制等电路的设计。
完成电路的设计后再对于主驱动轮传感器、梯级缺失传感器、扶手带测速传感器的安装,最后经过离线调试和在线调试,该系统实现了节能化运行。
它实现了自动扶梯的电脑化控制,使自动扶梯更趋于智能化。
关键词:自动扶梯;微机;控制系统ABSTRACTEscalator is a perennial passenger electric equipment, its running state often without load, Most of the escalator when the without load is still using the rated speed, High energy consumption, mechanical wear and serious shortcomings. So the escalators need for energy-saving operation transformation. This design is based on the use of energy-efficient escalator basic requirements to design a combination of computer and inverter control system of the escalator energy-saving operation. Process requirements to ensure the comfort and safety of operation conditions of the escalator could reduce power consumption and extend the working life of the escalator.Escalator control system design process includes on the basis of motors, thermal relays, the main power switch, contactors, transformers, wires and cables, and brake resistor selection to inverter drive, power control, braking, fault indication, access control, speed detection, security control, lighting control circuit design. After completion of the circuit design for the main drive wheel sensors, sensor missing rungs, handrail speed sensor installation. Finally, after offline debugging and debugging, the system realizes energy-saving operation. It implements the escalator computerized control, so that the escalator tends to be more intelligent.Keywords:Escalator; Microcomputer; Control System目录1、引言 (1)2、概述 (2)2.1 课题背景 (2)2.2 国内外文献综述 (3)2.3 设计研究内容 (5)3、控制系统工艺 (6)3.1 控制系统工艺 (6)3.2 控制系统工作流程 (7)4、控制电路设计 (9)4.1 电动机选型 (9)4.2 热继电器的选用 (9)4.3 主电源开关的选用 (9)4.4 接触器的选用 (9)4.5 变压器的选用 (10)4.6 电线及电缆的选用 (10)4.7 制动电阻选型 (10)4.8变频驱动回路 (11)4.9电源控制回路 (12)4.10制动回路 (12)4.11故障显示回路 (13)4.12变频器主控回路 (14)4.13检修控制回路 (15)4.14速度检测回路 (15)4.15 安全控制回路 (16)4.16照明控制回路 (16)5、系统安装工艺与调试 (18)5.1主驱动轮传感器安装 (18)5.2梯级缺失传感器安装 (19)5.3扶手带测速传感器安装 (19)5.4离线调试 (20)5.5 在线调试 (22)总结 (24)致谢 ..................................................................................................... 错误!未定义书签。

浅析自动扶梯桁架设计中的要点摘要:自动扶梯作为一种常见的交通工具,广泛应用于商场、机场、地铁站等人流量较大的场所。
自动扶梯的安全和舒适性对于使用者来说十分重要,而自动扶梯的桁架设计则是其结构设计中的重要环节之一。
本文将浅析自动扶梯桁架设计中的要点,包括结构承载特点、支撑结构的刚度与强度要求以及优化设计的方法等。
关键词:自动扶梯;桁架设计;优化设计一、引言自动扶梯是一种常见的城市交通工具,广泛应用于商场、机场、地铁站等公共场所。
其设计与安全性密切相关,其中支撑结构设计是至关重要的一环。
本文将深入探讨自动扶梯桁架设计中的要点,包括结构承载特点、刚度与强度要求、优化设计等方面。
二、自动扶梯结构承载特点自动扶梯的结构承载特点决定了其桁架设计需要考虑的关键因素。
首先,自动扶梯需要承受来自乘客和设备的动态荷载,包括行人的重量和移动、手推车、行李等。
其次,自动扶梯还需要考虑地震、风荷载等外部环境因素对结构的影响。
因此,设计师需要充分考虑这些因素,确保自动扶梯的结构能够稳定承载这些荷载。
自动扶梯的结构承载特点主要包括以下几个方面:负载均匀分布:自动扶梯上通常会有多人同时使用,因此承载结构需要能够均匀分担多人的重量,确保安全运行。
变化负载:负载不仅仅是静态的,还会因人的上下行动而产生变化,设计时需要考虑这种负载变化。
动态荷载:自动扶梯在运行过程中会受到不断变化的动态荷载,如乘客的步行、跳跃等,这些荷载需要被合理考虑。
环境影响:自动扶梯通常处于室内或半室内环境,受到温度、湿度等环境因素的影响,这也需要纳入设计考虑[1]。
三、自动扶梯支撑结构的刚度与强度要求(一)刚度要求自动扶梯的支撑结构必须具备足够的刚度,以保证运行过程中不会发生过度的挠曲或变形,从而确保乘客的安全感。
刚度要求包括以下几个方面:垂直刚度:自动扶梯的支撑结构在垂直方向上需要具备足够的刚度,以抵抗乘客的竖直负载。
横向刚度:自动扶梯的支撑结构在横向方向上需要具备足够的刚度,以抵抗乘客的横向力,防止扶梯侧倾。

商场自动扶梯设计方案及流程一、引言商场自动扶梯作为现代商业建筑中的重要交通工具,为人们提供了便捷的垂直交通方式。
本文将以人类视角,详细描述商场自动扶梯的设计方案及流程,使读者感受到仿佛是真人在叙述。
二、设计方案1. 商场自动扶梯的位置选择商场自动扶梯的位置选择应考虑人流量大、交通便利的地点,通常选择商场的主要进出口、主要楼层或主要购物区域。
这样可以最大程度地方便顾客的使用。
2. 商场自动扶梯的尺寸与容量商场自动扶梯的尺寸与容量应根据商场的人流量进行合理设计。
一般来说,商场自动扶梯的宽度应在1.2米至1.5米之间,承载能力应符合商场的人流量需求。
3. 商场自动扶梯的安全设计商场自动扶梯的安全设计是至关重要的。
设计中应考虑到防滑、防夹、防止物品掉落等安全要素。
同时,商场自动扶梯应配备紧急停止按钮、紧急报警器等设备,以保障顾客的安全。
4. 商场自动扶梯的外观设计商场自动扶梯的外观设计需要与商场整体风格相协调,并具有吸引力。
可以采用不同颜色的扶手、楼梯踏板以及下方的灯带等设计元素,以增加商场的美感。
三、设计流程1. 需求分析在设计商场自动扶梯之前,需要进行需求分析,了解商场的人流量、交通状况以及使用需求等方面的信息,以便合理设计商场自动扶梯的位置、尺寸和容量。
2. 初步设计根据需求分析的结果,进行商场自动扶梯的初步设计。
包括位置选择、尺寸与容量的确定、安全设计和外观设计等方面的考虑。
3. 详细设计在初步设计的基础上,进行商场自动扶梯的详细设计。
包括具体的尺寸、材料选择、安全设备设置等方面的考虑。
同时,还需要进行工程预算和时间计划的制定。
4. 施工与安装根据详细设计的结果,进行商场自动扶梯的施工与安装工作。
需要安装扶梯的结构、电气设备、控制系统等,并进行相关的测试和调试工作。
5. 验收与维护商场自动扶梯的设计流程完成后,需要进行验收工作,确保商场自动扶梯的安全可靠。
同时,还需要定期进行维护与保养,以保证商场自动扶梯的正常运行。

自动扶梯驱动系统设计概要:本文就自动扶梯驱动系统的设计与实验研究展开讨论,总结驱动系统设计与实验研究的内容希望能够为自动扶梯驱动系统设计提供参考。
自动扶梯的正常运行主要靠梯级的链传动以及扶手带的带传动两个最基本的组件传动来保证,扶手带既是人们乘坐电梯时可以扶持的移动带状物。
在自动扶梯的一般结构中,自动扶梯的电机通常被包裹在金属结构内,梯级、扶手带循环运动则主要通过一系列不同类型传动装置加以实现。
扶手带的循环运动主要依靠的是施加在扶手带上的一段或几段摩擦力。
根据自动扶梯手扶带所受摩擦力施加方式的不同可将自动扶梯的驱动方式分为摩擦轮驱动。
摩擦轮驱动指的是利用摩擦轮与手扶带之间的摩擦力来实现手扶带的循环运动。
摩擦轮驱动分为两种,一种是摩擦驱动轮在桁架外部的端部驱动扶手系统,在这种结构中,主要有全透明无支撑式、半透明有支撑式和不透明有支撑三种扶梯护栏结构模式。
这种手扶带驱动系统具有包角大、摩擦驱动力大,适用于大中高度扶梯的特点,但其使用范围受到传动距离较远这一缺陷的限制;另一种驱动形式为摩擦轮在桁架内部的中间驱动扶手系统,在这种系统结构中,大部分自动扶梯采用的是全透明无支撑护栏,因此摩擦轮通常设置在金属结构内部,与端部驱动扶手系统相比,这种结构形式导致了扶带弯曲次数增加。
压滚直线驱动的运动轨迹为直线,主要靠直线布置的两组或多组压滚组夹压驱动扶手带来实现手扶带的连续运动。
该结构主要有两种形式,结构相对复杂,存在一些技术缺陷,且某些结构方式达不到耐用节能的效果,因此摩擦轮驱动为扶手驱动中的常用方式。
一、驱动系统的设与预实验研究安全性、经济性、实用性是摩擦轮驱动系统的设计的关键出发点。
国标GB16899中对摩擦轮驱动系统的设计也做出了明确的规范,在实际设计中应当严格遵守,在实验研究中,摩擦轮结构设计中主要包括扶手带、扶手带支撑、摩擦轮以及扶带紧张装置的结构设计。
按出货状态可将扶手带分为环状和现场拼接两种,但要求使用时均为闭合状态。

1 绪论可编程序控制器(PLC)因采用了以运算机为核心的通用自动控制装置,它的功能强,靠得住性高,编程简单,利用方便,体积小巧,在工业控制中取得了普遍的应用。
以前的自动扶梯采用的是继电接触器控制的方式,扶梯采用星三角降压启动,由于接触器频繁吸合,常常出现故障,给电机的运行及扶梯的检修带来极大的不便。
PLC机从诞生以来,进展超级迅速,在发达的工业国家,已经普遍的应用在所有的工业部门,随着PLC性能、价钱比的不断提高,过去在利用专用运算机的场合此刻也能够利用PLC了。
PLC机的作用愈来愈大,其最大体、最普遍的应用是开关量逻辑控制。
PLC机的输入信号和输出信号都是只有通/断状态的开关量信号。
这种控制与继电器控制最为接近。
能够用价钱较低的、仅有开关量控制功能的PLC机作为继电器控制系统的替代物。
开关量逻辑控制能够用于单台设备,也能够用于自动生产线的控制。
PLC还能够对温度,压力,流量等持续转变的模拟量进行闭环控制。
现代的PLC机具有数学运算,数据传送,转换,排序主查表,位操作等多种功能。
能够完成数据的收集分析和处置。
PLC机随着进展结构与功能不断改良,应用范围也迅速扩大,它可直接应用于工业环境,具有较强的抗干扰能力,普遍的适应能力和应用范围。
咱们要想能够胜任PLC控制系统的设计工作,按要求完成好设计任务,仅仅掌握PLC设计的基础知识是不够的,必需通过反复实践,深切工作现场,灵活应用,不断积累经验。
我的设计题目是:商场自动扶梯控制系统设计。
通过设计这一题目,能够将咱们所学知识加以温习,巩固,从而达到能够灵活应用的目的。
由于设计者学识有限,设计时刻仓促,设计中必然有疏漏及错误,殷切希望列位老师和同窗批评指正。
自动扶梯介绍自动扶梯是由一台特种结构形式的链式输送机和两台特殊结构形式的胶带输送机所组合而成,带有循环运动梯路,用以在建筑物的不同层高间向上或向下倾斜输送乘客的固定电力驱动设备。
运载人员上下的一种持续输送机械。
自动扶梯工程施工设计方案一、项目概况本自动扶梯工程位于商业广场的主要出入口处,用于连接地下一层与地上一层,满足人员的快速出入需求。
本项目拟采用标准型自动扶梯,总长10.5米,总宽1.6米,设计速度0.5米/秒。
二、施工准备1.物料准备:-扶手:选用带有抗菌功能的PVC材质扶手,颜色与广场主题色相配。
-梳齿:选用特殊合金材质,耐磨耐用,确保乘客的安全。
-雅士乐面板:选用具有防滑功能的材质,确保使用者的安全。
2.人员准备:-工程经理:负责项目的整体监督、协调和管理。
-设计师:负责自动扶梯的设计、平面布置、材料选型等工作。
-施工人员:包括拆除工、电工、安装工等。
3.设备准备:-手动工具:锤子、螺丝刀、扳手等常用工具。
-动力设备:用于运输、举升、安装自动扶梯等。
三、施工流程1.地基处理:根据设计要求,对地基进行处理,确保地基的稳固和坚实。
需要进行清理、平整和填充等工作。
2.扶梯支撑架安装:根据设计要求,安装扶梯的支撑架,确保扶梯的稳定和平衡。
需要进行测量、定位和安装等工作。
3.电气线路布置:根据设计要求,进行电气线路的布置,确保扶梯的正常运行。
需要进行测量、铺设和连接等工作。
4.扶手、梳齿、雅士乐面板安装:根据设计要求,安装扶手、梳齿和雅士乐面板,确保乘客的安全和舒适。
需要进行测量、切割和安装等工作。
5.电机安装及调试:根据设计要求,安装电机,并进行调试,确保扶梯的顺畅运行。
需要进行安装、接线和测试等工作。
6.保护措施:在施工过程中,需要采取必要的保护措施,如设置警示标识、隔离区域等,确保施工安全。
7.竣工验收:在施工完成后,对自动扶梯进行验收和测试,并进行试运行,确保扶梯的正常使用。
四、施工安全措施1.组织培训:对施工人员进行培训,确保他们掌握操作方法和安全规范。
2.安全防护设施:在施工现场设置安全围挡、警示标识等,确保施工区域与非施工区域的分隔。
3.安全检查:定期对施工现场进行巡查和检查,及时排除安全隐患。
自动扶梯桁架结构设计的探讨摘要:自动扶梯桁架结构设计一般从强度和刚度两方面入手,通过CAD软件(AUTOCAD,PRO/E等)对自动扶梯桁架进行草绘和建模,然后利用应力线图或有限元软件工具进行强度和挠度计算,从而大大提高自动扶梯的设计效率。
关键词:PRO/E;自动扶梯;应力线图;有限元Abstract: the escalator truss structure design general from the two aspects of strength and rigidity, through the CAD software (AUTOCAD, PRO/E) on escalators truss for rough and modeling, and by using the finite element software tools chart or stress strength and deflection引言:自动扶梯桁架是一种尺寸多变但结构相似的钢架结构,其主体结构比较单一,但主要尺寸随着现场土建跨距和楼高的变化而变化,桁架结构尺寸需在现场土建尺寸确认后再进行设计,避免造成扶梯尺寸与土建不匹配,同时又需要保证现场工期。
故必须有一套快速可靠的桁架结构设计方法.本文在现有的扶梯技术基础上,介绍自动扶梯桁架结构设计和强度分析的方法。
1.自动扶梯结构承载特点自动扶梯所承受载荷主要有:1.1自重载荷:包括梯级、梯级链、梯路导轨系统、驱动装置、张紧装置、栏杆扶手装置和桁架结构等若干部件的自重。
根据实际的受载情况分别以集中力和均布力的形式作用在结构体上。
1.2乘客载荷:根据《GB16899-2011》要求,桁架结构的设计载荷应为5 000 N/m2,以梯级承载工作面的名义宽度1000mm,扶梯跨距13m的自动扶梯计算,乘客载荷约为6500kg,该载荷为均布力,在此力作用下,乘客载荷不需增加动载系数。
商场自动扶梯设计方案及流程商场自动扶梯的设计方案和流程需要考虑多个方面,以确保扶梯的实用性、安全性、耐用性和美观性。
以下是一个基本的设计方案和流程:一、明确设计要求在开始设计之前,需要明确设计要求,包括扶梯的长度、宽度、提升高度、倾斜角度等基本参数,以及商场的特定需求,例如与建筑物的接口、与其他电梯或扶梯的配合等。
二、选择合适的自动扶梯类型根据设计要求,选择合适的自动扶梯类型。
自动扶梯主要有两种类型:全高扶梯和半高扶梯。
全高扶梯的顶部和底部都设有平台,可以用于连接建筑物或与其他电梯配合使用;半高扶梯则只有一个平台,通常用于连接楼层或不同高度的位置。
三、确定扶梯的配置确定扶梯的配置,包括驱动系统、控制系统、安全系统等。
驱动系统是扶梯的核心部分,负责带动扶梯的运行;控制系统则负责控制扶梯的运行速度和方向;安全系统则包括紧急停止按钮、安全带等,用于保障乘客的安全。
四、设计扶梯外观根据商场的整体风格和设计要求,设计扶梯的外观。
外观设计应考虑材料、颜色、灯光等多个因素,以确保扶梯与周围环境的协调性。
五、确定扶梯尺寸和布局根据商场的布局和人流情况,确定扶梯的尺寸和布局。
尺寸包括扶梯的长度、宽度、提升高度等;布局则要考虑如何合理地安排扶梯的位置,以最大限度地满足乘客的需求。
六、进行详细设计在确定了扶梯的类型、配置、外观、尺寸和布局后,进行详细设计。
详细设计应包括电气设计、结构设计、控制系统设计等,以确保扶梯的安全性、稳定性和可靠性。
七、完成设计并进行审查完成设计后,进行全面的审查,以确保设计的合理性和可行性。
审查通过后,进行生产制造。
八、安装和调试将制造好的自动扶梯运至商场,进行安装和调试。
安装时应确保扶梯与建筑物的接口良好,调试时应确保扶梯运行平稳、安全可靠。
九、验收和使用完成安装和调试后,进行验收。
验收合格后,自动扶梯即可投入使用。
在使用过程中,应定期进行维护保养,以确保扶梯的安全性和稳定性。
自动扶梯的设计摘要自动扶梯是机电一体化中的代表类型。
近年来自动扶梯的快速成长,不但达到了社会的需求,而且促进了各行各业的进展,效益明显。
促进了新产品的研发和产品质量的提升。
在这样的情况下,普及扶梯技术,研究扶梯技术已成为首要任务。
自动扶梯是一个电气和气动的驱动装置,能够为乘客提供一个向下和向上倾斜的圆形运动梯。
它拥有特别结构和具有特别结构的两个皮带输送机的组合。
它可以用来在不同高度之间循环使用。
为了给人们乘梯带来更好的体验,而且声音小运行稳,。
因此降低噪声和振动频率是扶梯技术的主要研究项目。
自动扶梯的三个组成部分中最重要的是电动机。
其工作原理是:电动机带动扶梯的传动机构来使导轨上的滚轮转动,带动梯级往复运动,执行传送任务,通常把电动机、主传动机构和附加的制动与限速装置假设为一个整体,这个整体就被叫做驱动机。
关键词:自动扶梯的结构;驱动机的结构;扶梯的结构设计AbstractEscalator is a representative type in mechatronics. In recent years, the rapid growth of escalators has not only met the needs of the society, but also promoted the development of all walks of life with obvious benefits. The continuous formation of "escalator fever" will further promote the research and development of new products and the improvement of product quality. Under such circumstances, popularizing escalator technology and researching escalator technology have become the primary task.Escalator is an electric and pneumatic driving device, which can provide a circular movement ladder that inclines downward and upward for passengers. It has a special structure and a combination of two belt conveyors with a special structure. It can be used for recycling between different heights.In order to make passengers comfortable and not produce noise pollution around, the main requirements for escalators are smooth operation and low noise. Therefore, reducing noise and vibration frequency is the main research project of escalator technology.Escalator consists of power source, transmission mechanism and execution mechanism. Its working principle is: the motor drives the main transmission mechanism, chain transmission mechanismand many rollers to drive the steps to move back and forth and perform the transmission task. Generally, the motor, the main transmission mechanism and the additional braking and speed limiting device are assumed as a whole, which is called the driving machine.目录摘要 (I)第一章绪论 (1)1.1 自动扶梯的研究背景 (1)1.2 自动扶梯的国内外研究现状 (1)1.3 自动扶梯的研究意义 (3)1.4 本文的主要内容 (4)第二章自动扶梯的驱动机结构设计 (5)2.1 驱动机应具备的条件 (5)2.1.1驱动机的组成 (5)2.1.2 驱动机的技术要求 (6)2.2 驱动机主传动机构的选用 (8)2.2.1主传动机构的选择原则和依据 (8)2.2.2传动机构的性能及对比分析 (9)2.3 驱动机的机构形式 (10)2.3.1立式和卧式驱动机 (10)2.3.2整轴式和分轴式驱动机 (11)第三章自动扶梯结构设计与安装工艺 (13)3.1自动扶梯的主要参数 (13)3.1.1 选择蜗杆传动的类型 (14)3.1.2 齿面接触疲劳强度校核 (16)3.2 驱动机安装中应实现的技术指标 (18)3.2.1 驱动机安装工艺流程 (19)3.2.2 安装补充 (23)第四章控制系统的硬件设计 (26)4.1系统硬件设计 (26)4.2 PLC的选择 (26)4.2.1 变频器的选择 (27)4.2.2 传感器的选择 (28)4.3 扶梯的电气原理图 (28)4.4 PLC的I/O安排 (32)第五章控制系统的软件设计 (34)5.1 自动扶梯的流程图 (34)5.2梯形图 (36)第六章总结 (41)参考文献 (41)毕业设计附录目录 (43)第一章绪论1.1 自动扶梯的研究背景自动扶梯有一些和别的结构不同的特点。
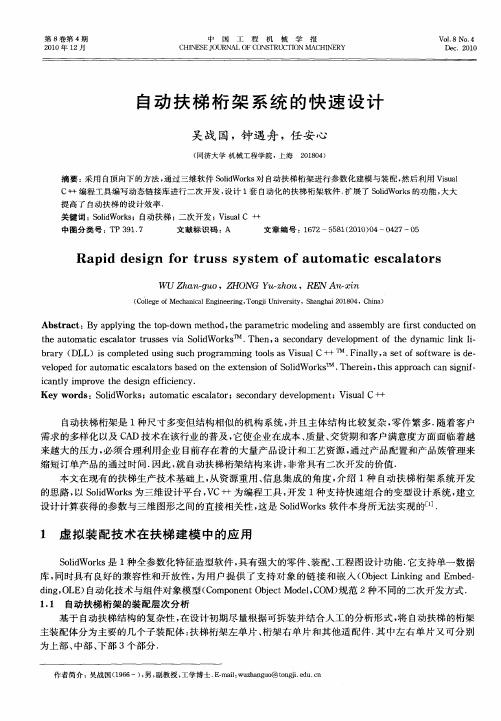
第8卷第4期2010年12月中 国 工 程 机 械 学 报CHINESE JOURNAL OF CONSTRUCTION MACHINER Y Vol.8No.4 Dec.2010作者简介:吴战国(1966-),男,副教授,工学博士.E 2mail :wuzhanguo @自动扶梯桁架系统的快速设计吴战国,钟遇舟,任安心(同济大学机械工程学院,上海 201804)摘要:采用自顶向下的方法,通过三维软件SolidWorks 对自动扶梯桁架进行参数化建模与装配,然后利用Vis 2ual C ++编程工具编写动态链接库进行二次开发,设计1套自动化的扶梯桁架软件.扩展了SolidWorks 的功能,大大提高了自动扶梯的设计效率.关键词:SolidWorks ;自动扶梯;二次开发;Visual C ++中图分类号:TP 391.7 文献标识码:A 文章编号:1672-5581(2010)04-0427-05Rapi d desi gn f or t r uss s ys t e m of a ut o ma tic escal a t orsWU Zha n 2guo ,ZHON G Yu 2zhou ,R EN A n 2xi n(College of Mechanical Engineering ,Tongji Universit y ,Shanghai 201804,China )A bs t r act :By applying t he top 2dow n met hod ,t he paramet ric modeling and assembly are first conducted on t he automatic escalator t russes via SolidWorks TM .Then ,a secondary develop ment of t he dynamic link li 2brary (DLL )is completed using such p rogramming tools as Visual C ++TM .Finally ,a set of software is de 2veloped for automatic escalators based on t he extension of SolidWorksTM .The rein ,t his app roach can signif 2icantly imp rove t he design efficiency.Key w or ds :SolidWorks ;automatic escalator ;secondary develop ment ;Vis ual C ++ 自动扶梯桁架是1种尺寸多变但结构相似的机构系统,并且主体结构比较复杂,零件繁多.随着客户需求的多样化以及CAD 技术在该行业的普及,它使企业在成本、质量、交货期和客户满意度方面面临着越来越大的压力,必须合理利用企业目前存在着的大量产品设计和工艺资源,通过产品配置和产品族管理来缩短订单产品的通过时间.因此,就自动扶梯桁架结构来讲,非常具有二次开发的价值.本文在现有的扶梯生产技术基础上,从资源重用、信息集成的角度,介绍1种自动扶梯桁架系统开发的思路,以SolidWorks 为三维设计平台,VC ++为编程工具,开发1种支持快速组合的变型设计系统,建立设计计算获得的参数与三维图形之间的直接相关性,这是SolidWorks 软件本身所无法实现的[1].1 虚拟装配技术在扶梯建模中的应用SolidWorks 是1种全参数化特征造型软件,具有强大的零件、装配、工程图设计功能.它支持单一数据库,同时具有良好的兼容性和开放性,为用户提供了支持对象的链接和嵌入(Object Linking and Embedding ,OL E )自动化技术与组件对象模型(Component Object Model ,COM )规范2种不同的二次开发方式.1.1 自动扶梯桁架的装配层次分析基于自动扶梯结构的复杂性,在设计初期尽量根据可拆装并结合人工的分析形式,将自动扶梯的桁架主装配体分为主要的几个子装配体:扶梯桁架左单片、桁架右单片和其他适配件.其中左右单片又可分别为上部、中部、下部3个部分. 中 国 工 程 机 械 学 报第8卷 1.2 装配体布局草图在自动扶梯中的应用图1 桁架装配体结构层次分析图Fig 1 Asse mbly s t r uct u re cha r t 一般装配方法有自上而下和自下而上2种.自上而下即Layout 设计,是利用布局草图设计1个装配体,绘制1个或多个草图,用草图显示每个装配体的零部件的位置.然后,在生成零件之前建立和修改设计图.使用布局草图设计装配体的最大好处,就是如果更改了布局草图,则装配体及其零件都会随之更新.自下而上方法是把1个大型的装配体分拆成很多小零件设计,然后把它们装配到一起.正是基于自顶向下设计的诸多优点,以及SolidWorks 的数据全相关性,并且子零件大多为结构件,非常适合利用焊件特征来建模,因此对整个自动扶梯装配的方法采用自顶向下的Layout 设计.图1为它的结构示意图.1.3 自动扶梯的零件在S oli d Wor ks 中的建模方法1.3.1 总装配体草图布局在总装配体中建立1个布局草图,其中以不同的草图实体代表装配体中的零件.按照整体设计思路,指定每个零部件的参照信息,通过草图的实体转换来传递相关参数,定义零部件的尺寸、形状以及它在装配体中的位置,确保每个零件都参考了此布局草图.如图2所示.1.3.2 零件建模根据得到的零件参数,参考机械设计手册,选取零件的截面属性,用“焊接件”的方法对零件进行建模,对于厂标件和通用件,在零件模式下设计,而不需要在装配环境下设计,以保持零件的通用性.在主体框架设计完成后,组装其他适配件,最后完成整个扶梯的装配,如图3所示.图2 L a yout 总设计草图Fig.2 L a yout s ketc h 图3 自动扶梯的总装配图Fig.3 Competed escala t or asse m bly2 自动扶梯桁架的二次开发原理2.1 S oli d Wor ks COM 二次开发简介SolidWorks 的COM 接口,是使用Visual C ++编程语言开发动态链接库(Dynamic Link Library ,DLL )程序.通过SolidWorks 提供的应用程序接口(Application Programming Interface ,A PI )函数,可以实现对SolidWorks 底层的开发,并且代码的执行效率高,能直接在SolidWorks 的界面下添加菜单、工具条等,在注册表中注册成功即可成为SolidWorks 插件,通过编写用户界面、调用数据库等,从而实现了与SolidWorks 的无缝集成.2.2 扶梯桁架的二次开发方法2.2.1扶梯桁架的二次开发方法通过调用A PI 函数对SolidWorks 进行二次开发通常有2种方式,程序驱动法和尺寸驱动法.程序驱动法是通过对A PI 函数的调用,实现在SolidWorks 中进行建模所需要的全部操作.使三维模型完全实现824924 第4期吴战国,等:自动扶梯桁架系统的快速设计 了参数化驱动,但编程工作量大,开发效率低,对开发人员要求也较高.尺寸驱动法是先在SolidWorks中建立初始三维模型,确定具体设计变量;然后在程序中调用A PI函数,修改模型的设计变量并重建,以得到最终模型.在此方法中,模型的设计变量是程序与模型之间相联系的纽带,通过少量的变量化参数来控制模型,实现快速、准确的三维图形设计.相对于完全编程的方式[2],本文中采用2种开发方式相结合的方法,按正确的设计关系在SolidWorks环境中绘制三维模型图形并保存.在三维建模过程中根据设计需要分析并确定模型的设计变量,然后通过编程环境编制程序,调用A PI函数打开已保存好的三维零件图形文件,修改其尺寸变量以及部分结构并重新生成模型,实现模型几何或拓扑信息的改变,从而完成零件的三维变量化建模过程.2.2.2 扶梯桁架可变参数的确定首先在SolidWorks中按上述方法对扶梯进行手工建模,在设计变量时应该尽量减少变量的个数,并同结构设计计算的变量保持一致,如:扶梯中的主要变量有:桁架的高度和宽度、上单片的长度和宽度、爬升角、中部长度和高度、下部长度和高度、材料属性、弦杆规格、角铁规格.中间支撑架的数目跟扶梯的高度和长度有关,可对从属参数直接添加方程式给予确定.其次在建模的过程中确定模型的从动设计变量,如左右扶梯单处为对称结构,添加必要的约束及方程式.最后,在后期装配中需要配合的面、基准面、轴等进行重命名,以在程序中方便调用.2.3 主要程序的编写及运行流程图2.3.1 CSWLift类的编写为了在程序中更方便地使用SolidWorks A PI函数,通常将A PI函数改写为成员函数,并封装在1个名为CSWLift类当中.这里主要介绍程序中用到的5个成员函数,分别为启动SolidWorks、打开零件文件模板、修改模型尺寸、重建模型、保存零件文件并给出函数的实现[3],其他函数可以自己编写.∥SWLift.hclass CSWLift{p ublic:ISldWorks3m_p SldWorks;IModelDoc3m_p ModelDoc;IPartDoc3m_p PartDoc; HRESUL Start();∥启动SolidWorks HRESUL New Part(IPartDoc33p PartDoc);∥新建零件文件HRESUL T SetDimValue(BSTR DimName,double value);∥修改模型尺寸HRESUL T Rebuild();∥重建模型long SaveFile(BSTR Pat h);∥保存零件文件};CSWLift类库的实现:∥CSWLift.cppHRESUL T CSWLift::Start()∥启动SolidWorks{HRESUL T hr=CoCreateInstance(CL SID_SldWorks,NULL,CL SC TX_LOCAL_SERV ER,IID_IS2 ldWorks,(void33)(&m_p SldWorks));ASSER T( hr==S_O K&&m_p SldWorks!=NULL);m_p SldWorks->p ut_Visible(t rue);ret urn hr;}HRESUL T CSWLift::New Part(IPartDoc33p PartDoc)∥新建零件文件{ HRESUL T hr=m_p SldWorks->INew Part(&(3p PartDoc));ASSER T(hr==S_O K&&(3p PartDoc)!=NULL);hr=(3p PartDoc)->QueryInterface(IID_IModelDoc,(void33)&m_pModelDoc);ASSER T(hr==S_O K&&m_pModelDoc!=NULL); 中 国 工 程 机 械 学 报第8卷 ret urn hr ;}HRESUL T CSWLift ::SetDimValue (BSTR DimName ,do uble value )∥修改模型尺寸{ L PDIM ENSION ret ; HRESUL T hr =m_p ModelDoc ->IParameter (DimName ,&ret ); ASSER T (hr ==S_O K &&ret !=NULL ); hr =ret ->p ut_Value (value ); ASSER T (hr ==S_O K ); ret ->Release ();∥释放指针 ret urn hr ;}HRESUL CSWLift ::Rebuild ()∥重建模型{ VA RIAN T_BOOL ret ; HRESUL T hr =m_p ModelDoc ->Edit Rebuild3(&ret ); ASSER T (hr ==S_O K ); ret urn hr ;}long CSWLift ::SaveFile (BSTR Pat h )∥保存零件文件,可在之间调用文件对话框自定义保存路径{ HRESUL T hr ; long ret =0;图4 程序运行流程图Fig.4 P r ogr a m r u n f low c ha rt hr =m _p ModelDoc ->SaveAsSilent (Pat h ,false ,&ret ); ASSER T (hr ==S_O K ); ret urn ret ;}2.3.2 自定义界面及建模实现在VC ++中自定义界面,通过自定义界面输入扶梯桁架的相关参数,对主要可变参数进行归纳,以下是部分重要参数的名称及推荐取值范围:工程图号(自定义输入),扶梯的提升角度(10°~45°),扶梯的人行通道宽度(800~2000mm ),弦杆规格与角铁规格(自定义),扶梯中部分体数(1~4个),提升高度(3000~7000mm ),上部长度变化(500~2000mm ),上部高度(500~2000mm ),中部长度(1000~8000mm ),中部高度(500~2000mm ),下部长度(500~2000mm ),下部高度(500~2000mm ).另外,可以利用编程从其他数据文件获取数据(如记事本,excel ,access 数据库文件),点击确定,可以自动实现三维建模[4],在运行结束后保存本次扶梯的技术参数,整个程序的运行流程图如图4所示.3 结论(1)本文通过分析自动扶梯桁架系统的结构,针对自动扶梯采取1种有效的建模思路,通过Solid 2works 对其进行自顶向下设计,快速地完成基于参数化的自动扶梯零部件的实体建模和虚拟装配.(2)利用面向对象开发Visual C ++对Solidworks 平台,针对扶梯桁架进行二次开发,实现了自动扶梯桁架结构的自动化建模.自顶向下的设计减少了编程的工作量,缩短了自动扶梯设计和制造周期,降低034134 第4期吴战国,等:自动扶梯桁架系统的快速设计 产品开发成本,对提供产品快速响应市场变化的能力,具有重要的应用价值.参考文献:[1] 徐格宁,孙占营,陶元芳.基于组件对象模型的SolidWorks三维参数化建模方法[J].中国工程机械学报,2004,2(3):263-269.XU Gening,SUN Zhanying,TAO Yuanfang.Three dimension parameterized modeling in SolidWorks based on component object model [J].Chinese Journal of Const ruction Machinery,2004,2(3):263-269.[2] 徐国权,黄志超.基于SolidWorks的变量化设计二次开发研究[J].机械设计与研究,2007,23(1):68-70.XU Guoquan,HUAN G Zhichao.Research on parametric design in it s furt her development based on SolidWorks[J].Machine Design and Research,2007,23(1):68-70.[3] 江洪,魏峥,王涛威.SolidWorks二次开发实例解析[M].北京:机械工业出版社,2004.J IAN G Hong,WEI Zheng,WAN G Taowei.Case interpretation of secondary development of SolidWorks[M].Beijing:China Machine Press,2004.[4] SolidWorks公司.SolidWorks高级教程:二次开发与API[M].杭州新迪数字工程系统有限公司,译.北京:机械工业出版社,2007.SolidWorks Corporation.SolidWorks advanced tutorial:redevelopment and API[M].Hangzhou New Dimension System Co Ltd,Trans2 lation.Beijing:China Machine Press,2007.(上接第426页)[5] 周文波,吴惠明.盾构法隧道施工智能化辅助决策系统[J].城市道桥与防洪,2004(1):65-69.ZHOU Wenbo,WU Huiming.Intelligent auxiliary policy2making system of tunnel construction by shield construction[J].Urban Roads Bridges&Flood Control,2004(1):65-69.[6] 王成栋,宋鹏举,周健,等.TBM故障诊断专家系统的设计与实现[J].计算机工程与应用,2002(22):14-19.WAN G Chengdong,SON G Pengju,Zhou Jian,et al.Design and implementation of fault diagnostic expert system for TBM[J].Com2 puter Engineering and Applications,2002(22):14-19.[7] 赵金汉.盾构法隧道施工中的线形管理[J].安徽建筑,2005(1):41-43.ZHAO Jinhan.Line management of shield tunnel construction[J].Anhui Architect ure,2005(1):41-43.[8] 宋坤,邹天思.Delphi数据库系统开发完全手册[M].北京:人民邮电出版社,2006.SON G Kun,ZOU plete manual of delphi database system development[M].Beijing:Post s and Telecom Press,2006. [9] 张凤祥,傅德明,杨国祥,等.盾构隧道施工手册[M].北京:人民交通出版社,2005.ZHAN G Fengxiang,FU Deming,YAN G Guoxiang,et al.Manual of shield tunnel construction[M].Beijing:China Communications Press,2005.[10] 高春香.盾构施工中管片拟合D TA问题研究[D].武汉:华中科技大学,2004.GAO Chunxiang.Research on problems of fitting D TA for shield tunnel construction[D].Wuhan:Huanzhong University of Science and Technology,2004.[11] 叶培旭.复合地层隧道盾构掘进姿态控制技术研究[D].上海:同济大学,2010.YE Peixu.Research on control technology of shield boring attitude in mixed ground[D].Shanghai:Tongji University,2010.。