简易交通灯报告(附源程序——汇编语言)
- 格式:doc
- 大小:49.00 KB
- 文档页数:4
设计报告一、设计方法:1、通过老师上课讲的内容及要求来设计。
2、开始时可跟着老师走从基础使用4094实现倒计时开始一步一步实现。
3、实现基础部分后我们就可按着自己的思路结合单片机的学习从而一步一步实现整个功能。
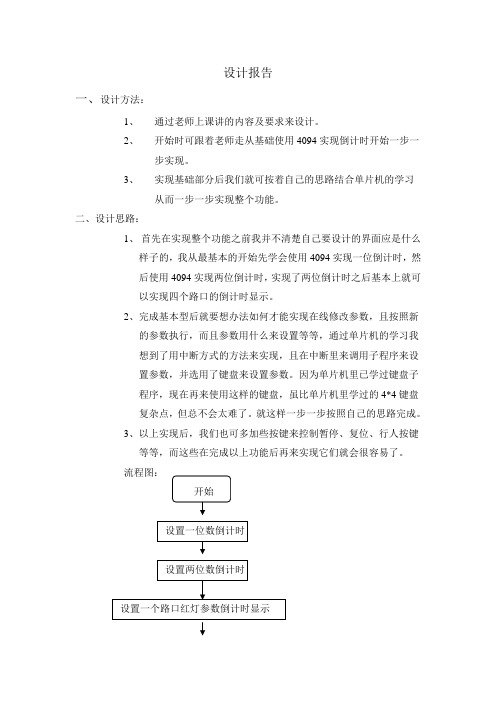
二、设计思路:1、首先在实现整个功能之前我并不清楚自己要设计的界面应是什么样子的,我从最基本的开始先学会使用4094实现一位倒计时,然后使用4094实现两位倒计时,实现了两位倒计时之后基本上就可以实现四个路口的倒计时显示。
2、完成基本型后就要想办法如何才能实现在线修改参数,且按照新的参数执行,而且参数用什么来设置等等,通过单片机的学习我想到了用中断方式的方法来实现,且在中断里来调用子程序来设置参数,并选用了键盘来设置参数。
因为单片机里已学过键盘子程序,现在再来使用这样的键盘,虽比单片机里学过的4*4键盘复杂点,但总不会太难了。
就这样一步一步按照自己的思路完成。
3、以上实现后,我们也可多加些按键来控制暂停、复位、行人按键等等,而这些在完成以上功能后再来实现它们就会很容易了。
流程图:三、选择的芯片:AT89C51、4094、KEYPAD-PHONE、LED-GREEN、LED-RED、LED-YELLOW、TSEG-COM-AN-GRN、3WATT100R、BUTTON 四、硬件设计:五、软件设计:1、部分代码:;30H、34H、35H主干道红、绿、黄灯,33H、31H、32H支干道红、绿、黄灯,修改用外部中断ORG 0000HLJMP MAINORG 0003H ;复位中断入口地址LJMP FWORG 0013H ;修改参数中断入口地址LJMP XGORG 0030HMAIN:MOV 30H,#50MOV 31H,#30MOV 32H,#20MOV 33H,#40MOV 34H,#32MOV 35H,#08LOOP: SETB IT0 ;设置外部中断0的触发方式SETB IT1 ;设置外部中断1的触发方式SETB EX0 ;开启外部中断0SETB EX1 ;开启外部中断1SETB PX0 ;设置优先级CLR PX1SETB EA ;开启总中断STAR1:MOV 40H,30HMOV 41H,31HMOV 42H,32HMOV 43H,33HMOV 44H,34HMOV 45H,35H;主干道的红与支干道的绿ZHUHO:CLR P2.7 ;关门,减震作用MOV 46H,#0F5H ;显示LED亮与灭MOV A,40H ;显示主干道的红灯参数LCALL XSLCALL LPMOV A,41H ;显示支干道的绿灯参数LCALL XSLCALL LOPSETB P2.7 ;开门,减震作用LCALL DELAYDEC 40H ;倒计时JNB P1.7,ZHIHODJNZ 41H,ZHUHOCLR P2.7MOV A,40H ;显示主干道的红灯参数LCALL XSLCALL LPMOV A,41H ;显示支干道的绿灯参数LCALL XSLCALL LOPSETB P2.7LCALL DELAY;主干道的红与支干道的黄ZIHU:CLR P2.7MOV 46H,#0F6H ;显示LED亮与灭MOV A,42H ;显示主干道的红灯参数LCALL XSLCALL LPMOV A,42H ;显示支干道的黄灯参数LCALL XSLCALL LOPSETB P2.7LCALL DELAYJNB P1.7,ZHIHO ;倒计时DJNZ 42H,ZIHUCLR P2.7MOV A,42H ;显示主干道的红灯参数LCALL XSLCALL LPMOV A,42H ;显示支干道的黄灯参数LCALL XSLCALL LOPSETB P2.7LCALL DELAY;支干道的红与主干道的绿ZHIHO:CLR P2.7MOV 46H,#0EBH ;显示LED亮与灭MOV A,43H ;显示支干道的红灯参数LCALL XSLCALL LOPMOV A,44H ;显示主干道的绿灯参数LCALL XSLCALL LPSETB P2.7LCALL DELAYDEC 43HDJNZ 44H,ZHIHOCLR P2.7MOV A,43H ;显示支干道的红灯参数LCALL XSLCALL LOPMOV A,44H ;显示主干道的绿灯参数LCALL XSLCALL LPSETB P2.7LCALL DELAY;支干道的红与主干道的黄ZUHU:CLR P2.7MOV 46H,#0DBH ;显示LED亮与灭MOV A,45H ;显示支干道的红灯参数LCALL XSLCALL LOPMOV A,45H ;显示主干道的黄灯参数LCALL XSLCALL LPSETB P2.7LCALL DELAYDJNZ 45H,ZUHUCLR P2.7MOV A,45H ;显示支干道的红灯参数LCALL XSLCALL LOPMOV A,45H ;显示主干道的黄灯参数LCALL XSLCALL LPSETB P2.7LCALL DELAYLJMP STAR1XG:JB P3.3,EXIT ;修改参数中断服务子程序MOV A,#00H ;使数码管都显示00MOV 46H,#0FFH ;使LED都灭LCALL XSLCALL LPLCALL LOPSJMP FCZFW:CLR EA ;复位中断服务子程序MOV A,#88MOV 46H,#0FFHLCALL XSLCALL LPLCALL LOP;产生中断后对参数重新赋初值FCZ:MOV P0,#0F9HMOV P2,#0BFHLCALL LKEY1 ;设置第一个参数MOV 30H,20HMOV P0,#0A4HMOV P2,#0BFHLCALL LKEY1 ;设置第二个参数MOV 31H,20HMOV P0,#0B0HMOV P2,#0BFHLCALL LKEY1 ;设置第三个参数MOV 33H,20HMOV P0,#99HMOV P2,#0BFHLCALL LKEY1 ;设置第四个参数MOV 34H,20HMOV A,30HSUBB A,31HMOV 32H,AMOV A,33HSUBB A,34HMOV 35H,AMOV 40H,30HMOV 41H,31HMOV 42H,32HMOV 43H,33HMOV 44H,34HMOV 45H,35HMOV P0,#0FFHMOV P2,#0FFHEXIT:RETI ;中断返回DELAY:MOV R3,#10 ;延时0.5s子程序MOV TMOD,#01HMOV TH0,#3CHMOV TL0,#0B0HSETB TR0LOOP1:JBC TF0,LOOP2SJMP LOOP1LOOP2:MOV TH0,#3CHMOV TL0,#0B0HDJNZ R3,LOOP1CLR TR0RETXS:MOV DPTR,#TAB ;显示子程序MOV B,#10DIV ABMOVC A,@A+DPTRMOV R5,AMOV A,BMOVC A,@A+DPTRMOV R6,ARETTAB: DB 0C0H,0F9H,0A4H,0B0HDB 99H,92H,82H,0F8HDB 80H,90H,88H,83HDB 0C6H,0A1H,86H,8EHLP:CLR C ;4094主干道显示两位倒计时子程序MOV R0,#08HMOV A,R6LP1:CLR P3.7RLC AMOV P3.6,CSETB P3.7DJNZ R0,LP1MOV A,R5MOV R0,#08HLP2:CLR P3.7RLC AMOV P3.6,CSETB P3.7DJNZ R0,LP2RETLOP:CLR C ;4094支干道显示两位数倒计时子程序MOV R0,#08HMOV A,R6LOP1:CLR P3.5RLC AMOV P3.4,CSETB P3.5DJNZ R0,LOP1MOV A,R5MOV R0,#08HLOP2:CLR P3.5RLC AMOV P3.4,CSETB P3.5DJNZ R0,LOP2XP2:MOV R0,#08H ;四个路口红绿灯LED显示器子程序MOV A,46HLP5:CLR P3.1RLC AMOV P3.0,CSETB P3.1DJNZ R0,LP5RET;键盘扫描子程序KEY16:LCALL KS ; 读键盘JZ KEY16 ; 判是否有键按下,A=0表示无键按下,再读LCALL T10MS ; 延时LCALL KS ; 有键按下的话,再读一次,消除抖动JZ KEY16 ; 判是否有键按下,A=0表示无键按下,再读MOV R2,#0EFH ; 列扫描初值,11101111MOV R4,#00H ; 列扫描计数单元置"0"; 下面进行列扫描(0~3)、读行值(01、04、07、0FF)LK1:MOV P1,R2 ; P1.4=0, 扫描第一列JB P1.0,ONE ; 判是否第0行健按下,否判下一行MOV A,#01H ; 是,行值"01"LJMP KPONE:JB P1.1,TWO ; 判是否第1行健按下,否判下一行MOV A,#04H ;是,行值"04"LJMP KPTWO:JB P1.2,THREE ; 判是否第2行健按下,否判下一行MOV A,#07H ; 是,行值"07"LJMP KPTHREE:JB P1.3,NEXT ; 判是否第3行健按下,否则扫描下一列MOV A,#0FFH ; 是,行值"0ff"LJMP KPNEXT:INC R4 ; 列计数加1MOV A,R2 ; 行扫描完,列移位,继续JNB ACC.6,KND ; 判是否列扫描结束RL A ; 左移,扫下一列MOV R2,AAJMP LK1 ; 转下一列读键KND:AJMP KEY16KP:ADD A,R4 ; 生成键值,A=行基值+列值(0~3)PUSH ACCLK:LCALL KSJNZ LKPOP ACCSETB P1.7RETT10MS:MOV R7,#10H ;T10ms延时子程序TS1:MOV R6,#0FFHTS2:NOPNOPDJNZ R6,TS2DJNZ R7,TS1RETKS:MOV P1,#0FH ; 判有无键按下子程序MOV A,P1CPL AANL A,#0FHRETLKEY1:MOV A,#0LCALL KEY16 ; 读第一个数CJNE A,#0AH,LKEY2 ; 键值>9则重读键SJMP LKEY1LKEY2:JNC LKEY1MOV R0,A ; 保存第一个数SWAP ALCALL XSP0P2 ; 显示第一个数LKEY3:MOV A,#0LCALL KEY16 ; 读第二个数CJNE A,#0AH,LKEY4 ; 键值>9(非数字键)则重读键SJMP LKEY3SJMP LKEY3LKEY4:JNC LKEY3MOV R1,A ; 第二个数存入B中MOV A,R0 ; 取第一个数SWAP A ; 换到高位ADD A,R1 ; 第二个数(低位)与第一个数(高位)合并MOV 20H,APUSH AMOV A,R0MOV B,#10MUL ABADD A,R1MOV 20H,APOP ALCALL XSP0P2 ; 显示两个数JB P1.3,$ ;判确定键有没按下RETXSP0P2:PUSH B ;显示子程序MOV DPTR,#XSTAB ; 取数据表首地址MOV B,A ; 保存原数据ANL A,#0FH ; 截取低4位数MOVC A,@A+DPTR ; 取显示字型码MOV P0,A ; 送P0显示MOV A,B ; 取原数据ANL A,#0F0H ; 截取高4位SWAP A ; 半字节交换MOVC A,@A+DPTR ; 取显示段码MOV P2,A ; 送P2显示MOV A,BPOP BRETXSTAB: DB 0C0H,0F9H,0A4H,0B0HDB 99H,92H,82H,0F8HDB 80H,90H,88H,83HDB 0C6H,0A1H,86H,8EHEND六、时间安排:1、要完成这个项目我们只有两个周的时间,第一个周我们完成了基本的用4094实现两位数的倒计时,并实现基本的十字路口,两路显示,能够实现最基本的运行。
交通灯汇编语言课程设计【精选文档】(文档可以直接使用,也可根据实际需要修改使用,可编辑推荐下载)课程设计说明书题目交通灯系统设计系(部) 信息工程系专业电气工程及其自动化班级学生姓名学号07081232712 月7 日至12 月18 日共 2 周指导教师(签字)系主任(签字)2009年12 月 4 日课程设计任务书题目交通灯系统设计系(部) 信息工程系专业电气工程及其自动化班级学生姓名学号07081232712 月7 日至12 月18 日共 2 周指导教师(签字)系主任(签字)2009年12 月 4 日成绩评定表目录一、设计任务与要求 (1)1、设计任务与要求的分析 (1)二、软件设计 (2)1、显示原理 (2)2、计数器初值计算 (2)3、每秒钟的设定 (2)4、控制系统、时间显示模块 (3)三、硬件电路设计 (5)1、74LS164的应用 (5)2、LED显示器件工作原理 (5)四、安装与调试 (5)五、结论与心得 (7)六、参考文献 (7)附录:1、源程序2、系统原理图摘要本系统由单片机系统、键盘、LED 显示、数码管显示、交通灯演示系统组成。
系统除基本交通灯功能外,还具有倒计时、时间设置、信号灯闪烁、信号灯颜色分时亮、分时段调整信号灯的点亮时间等功能。
同时给出了软硬件设计方法,设计过程包括硬件电路设计和程序设计两大步骤,关键词:AT80C51单片机、交通灯控制系统、定时循环、数码管显示、延时。
一、设计任务与要求假设一个十字路口为东西南北走向。
开始为四个路口的红灯全部亮之后,东西路口的绿灯亮,南北路口的红灯亮,东西路口方向通车,延时一段时间后(20秒),东西路口的绿灯,闪烁若干次后(3秒),东西路口的绿灯熄灭,同时东西路口的黄灯亮,延时一段时间后(2秒),东西路口的红灯亮,南北路口的绿灯亮,南北路口方向通车,延时一段时间后(20秒),南北路口的绿灯闪烁若干次后(3秒),南北路口的绿灯熄灭,同时南北路口的黄灯亮,延时一段时间后(2秒),再切换到东西路口的绿灯亮,南北路口的红灯亮,之后重复以上过程。
微机原理与接口技术课程设计报告班级:学号:姓名:同组队员:指导教师:日期: 12月25日—1月9日目录1 课程设计的目的及基本要求 (3)2 设计题一 (3)2.1 程序目的与内容 (3)2.2 流程图 (3)2.3 源程序 (4)2.4 调试过程及程序运行结果 (6)3 设计题二 (8)3.1 实验电路及连线 (9)3.2 程序设计思想 (9)3.3 程序流程图 (10)3.4 实验程序 (11)3.5 设计题二提高及拓展 (13)3.6 实验结果分析 (21)4 设计题三……………………………………………………………………………4.1 程序设计思想 (22)4.2 流程图 (23)4.3 源程序 (23)4.4 调试过程及程序运行结果 (24)5 实验心得 (25)6 参考文献 (26)课程设计目的及基本要求:本课程设计是微机原理与接口技术课程的配套内容。
微型计算机在很多场合作为一个控制系统的控制部件或作为一个设备的智能化部件融入系统中。
对于自动化专业的学生了解和认识微机的硬件结构和输入输出接口技术是十分必要的。
实验题目(1)编制一个完整的程序,计算10个正整数(字数据)之和,如果不超过机器数范围(65535),则计算其平均值并存于RESULT 中,否则显示“OVERFLOW ”。
一、程序设计思想:程序目的是为了实现在程序模拟软件dos 的环境下,实现对10个数字字符取平均值,并要求能够判断是否超过机器数的范围,如果超出,则显示“OVERFLOW ”,如果不超出则显示平均值,而且能够实现多位显示。
二、程序流程图:三、源程序:DATA SEGMENTNUM DW 5,5,5,5,5,5,5,5,5,5,ERR DB 'OVERFLOW',0DH,0AH,'$' RESULT DW ?DATA ENDSCODE SEGMENTASSUME CS: CODE,DS: DATABEGIN: MOV AX,DATAMOV DS,AXXOR AX,AXMOV SI,AXMOV CX,10SUM: ADD AX,NUM[SI]JC NEXTADD SI,2LOOP SUMMOV BX,10MOV DX,0DIV BXMOV RESULT,AXJMP SHORT EXITNEXT: LEA DX,STRMOV AH,09HINT 21HEXIT: MOV AH,4CHINT 21HCODE ENDSEND BEGIN四、调试过程及程序运行结果:4.1 溢出的情况:4.2 未溢出的结果:实验题目(2)根据实际交通灯的变化规律,共有东西南北四个信号灯。

单片机应用技术实验报告BCD码加法一、实验内容编写一个程序实现多位BCD码加法。
假设单片机RAM中20H和30H中放着BCD码加数和被加数,结果放在20H开始的单元中。
要求考虑进位问题。
二、实验源程序ORG0630HMOV R0,#20HMOV R1,#30HMOV A,R7;R7中放着加数的个数MOV R6,A;R6中放置最后结果CLR CLOOP:MOV A,@R0;取加数ADDC A,@R1DA A;十进制加法调整MOV@R0,A;把结果送回20H开始的单元INC R0INC R1DJNZ R7,LOOPJC NEXT1;如果最后一次加法有进位,跳转到NEXT1SJMP NEXT2NEXT1:MOV@R0,#1;R0中放置进位INC R6NEXT2:NOPEND三、实验小结这个BCD码加法实验在编程是,遇到些语法小问题,后来在同组同学的探讨下纠正了过来。
当程序运行正确时我们有一种成就感,很高兴。
实验名称:P3.3输入、P0口输出一、实验内容(1)P3.3口做输入口,外接一脉冲,每输入一个脉冲,P1口按十六进制加一。
(2)P1口做输出口,编写程序,使P1口接的8个发光二极管L1—L8按16进制加一方式点亮发光二极管。
二、实验说明(1)P1口是准双向口,它作为输出口时与一般的双向口使用方法相同,由准双向口结构可知:当P1口作为输入口时,必须先对它置高电平,使内部MOS管截止,因内部上拉电阻是20KΩ—40KΩ,故不会对外部输入产生影响。
(2)延时子程序的延时计算问题。
对于延时程序DELAY:MOV R6,#00HDELAY1:MOV R7,#80HDJNZ R7,$DJNZ R6,DELAY1MOV、DJNZ指令均需用两个机器周期,而一个机器周期时间长度为12/6.0MHZ,所以该段指令执行时间为:((80+1)×256+1)×2×(12÷6000000)=132.1ms三、实验步骤(1)P3.3用插针连至K1,P1.0—P1.7用插针连至L1—L8。
题目:智能交通灯控制系统班级:p09电气四班姓名:刘强0903110429一、任务:设计并制作一个城市交道口交通灯控制糸统二、要求:根据下图交道口模型,装上交通灯。
交道口模型如图所示。
交通灯控制规则如下:1)每个街口有左拐、右拐、直行及行人四种指示灯。
每个灯有红、绿两种颜色。
自行车与汽车共用左拐、右拐和直行灯。
2)共有四种通行方式:①车辆南北直行、各路右拐,南北向行人通行。
南北向通行时间为1分钟,各路右拐比直行滞后10秒钟开放。
②南北向左拐、各路右拐,行人禁行。
通行时间为1分钟。
③东西向直行、各路右拐,东西向行人通行。
东西向通行时间为1分钟,各路右拐比直行滞后10秒钟开放。
④东西向左拐、各路右拐。
行人禁行。
通行时间为1分钟。
3)在通行结束前10秒钟,绿灯闪烁直至结束。
1, 基本部分:按照上述控制要求,用发光二极管代替交通灯,用PROTEUS绘制电路图,并仿真调试实现之。
2, 发挥部分:1.有倒计时时间显示。
2若交道口出现紧急情况,交警可将糸统设置成手动:全路口车辆禁行、行人通行。
紧急情况结束后再转成自动状态。
3当有119、120等特种车辆通过时,糸统自动转为特种车放行,其它车辆禁止状态。
特种车辆通过15秒钟后,糸统自动恢复,用模型车演示。
4其它自选措施。
智能交通灯控制系统1.系统功能的确定功能一:可以实现红绿灯的转换以及控制路口的基本功能。
功能二:有倒计时功能和最后十秒绿灯闪烁的功能。
功能三:出现紧急情况时,警察可以手动控制特殊状态,并维持交通。
功能四:119或120等特种车经过时,可转换成为特种车道行驶状态,并在情况消除后15秒,恢复原状。
2.方案论证2.1方案一:如下图所示,为proteus仿真图。
其中,P1,P0端口的8位分别来控制东西,南北方向的红绿灯。
且运用了4个74LS164的8位移位寄存器(串行输入,并行输出)来控制4个LED的数码显示,通过AT89C51单片机的P3.0,P3.1两个扩展端口来接4个并行连接的74LS164的DIN和CLK两个端口来显示倒计时的功能,这会产生乱码使得显示杂乱,而主程序以顺序执行为主,其中穿插着对P3.7的端口高低电平的测试和跳转语句来实现功能三,并且功能一、二在主程序中实现,没有功能四的的实现程序。
单片机交通灯实验汇编语言程序经过几天的整理,终于将网络上得到交通灯仿真文件,用汇编自己编写了一个程序,实验结果完全符合本人的思路,实验成功。
程序比较长,估计还会用更好的办法重新写。
编写心得是:单片机编程,不一定要背指令,用时可以查,也不必去默写子程序,用时还是可以查,但是,很关键的就是,你的程序,你自己要清楚整个的执行过程,也就是单片机的执行流程。
而在实际的应用中,要注意驱动电路的设计,特别是单片机上电复位输出高电平可能造成的影响。
程序如下:如果网页显示格式错乱可从51hei/f/jtda.rar 处下载. ORG 0000HSTART:MOV R2,#30SU0:MOV P0,#00HMOV P1,#00HMOV P2,#00HMOV P3,#00111111BMOV A,R2MOV R4,AMOV A,R4MOV R0,AMOV B,#5DIV ABMOV B,#3MUL ABMOV R1,ASETB P0.4SETB P0.7SETB P2.2SETBP2.5AJMP KEYSU1A: DEC R0DEC R1SUL5: CJNE R1,#5,SUL6SETB P2.7SUL6: CJNE R1,#4,SUL7SETB P2.7SUL7: CJNE R1,#3,SUL1SETB P2.7SUL1: CJNE R1,#2,SUL2SETB P2.7SUL2: CJNE R1,#1,SUL3SETB P2.7SUL3: CJNE R1,#0,SUL4MOV A,R0MOV R1,ACLR P2.5CLR P0.7SETB P0.5SETB P2.4SUL4: CJNE R0,#0,KEYAJMP SU0BKEY: JB P3.5,KEY1 LCALL DELAY MOVR2,#45KEY1:JB P3.2,KEY2 LCALL DELAY MOV R2,#60KEY2:JB P3.3,KEY3 LCALL DELAY MOV A,R2 ADD A,#5 MOV R2,A CJNE R2,#95,DD MOVR2,#95KEY3:JB P3.4,DD LCALL DELAY MOV A,R2 SUBB A,#5 MOV R2,A CJNE R2,#0,DD MOV R2,#0DD:MOV R3,#50;数码1DD1: MOV P1,#00H MOV A,R0 MOV B,#10 DIV AB MOV DPTR,#TAB MOVC A,@A+DPTR MOV P1,A SETB P0.0 LCALL DELAY1 CLR P0.0 MOV A,B MOV DPTR,#TAB MOVC A,@A+DPTR MOV P1,A SETB P0.1 LCALL DELAY1 CLR P0.1;数码2 MOV。
题目:简易交通灯一、设计目的利用TDN微机原理试验箱及单元电路,实现对一道路交通灯的控制。
当通过车辆计数达到50时,绿灯灭,红灯亮,同时数码块倒计时若干秒(此次设计中设为9秒)。
此时,车辆停止,行人可以通过。
二、参加人员及分工李——试验报告霍——调试程序洪——编写程序三、技术要求1、设计完成交通灯的电路2、采用TDN试验箱上的8255、8259、8253完成3、程序设计中采用软件延时四、试验器材TDN-MD86/51实验箱一台,8253一片,8255一片,8259一片,数码管一组,发光二极管一组。
五、设计和调试环境TDN-MD86/51教学试验系统六、题目分析、工作原理、设计思想题目分析我们所做的交通灯是控制单路口处车辆和行人的通过及停止的简易交通灯。
因此需要两个灯和一块用于显示倒计时的数码块来控制车辆和行人的通行、停留问题。
其中两个灯分为红绿色,主要根据两只灯的亮灭情况来控制车辆,当红灯灭绿灯亮的时候车辆可以通过,而红灯亮绿灯灭时车辆就要停止通行。
数码块用于显示倒计时的时间以控制人,当倒计时开始时人通行,倒计时结束后行人就要等待。
根据题目分析得出以下设计思想及工作原理:设计思想在一开始启动交通灯时设置为红灯灭绿灯亮,让车辆先通行,行人等待,当通过50辆车后,红绿灯都同时灭然后红灯亮绿灯灭且数码快开始倒计时,此时为行人通行时间。
然后当数码块倒计时到0时行人通行的时间结束。
转而红灯灭绿灯亮又改为车辆通行时间。
红绿灯和数码块如此反复工作就构成的交通灯。
工作原理通过向8259写入程序来控制其他器件的工作。
在程序一开始写入中断向量和各芯片的控制方式字,以确保发生中断是正确的响应中断及芯片正确的工作状态。
接下来的程序就是控制8255和8253,8255选择工作方式1,A、B、C、口都做基本的输入输出。
通过8255A 口先让红灯灭绿灯亮。
8253选择工作方式2:计数停止中断,通过8253对车辆的计数达到50辆车是就发出中断请求。
——交通灯设计人:张玉印200800800439李娜200800800099一、设计目标:设计一个工作于支、干路交叉处的交通灯系统,支道和干道各有一组交通灯,依次为绿、黄、红。
主干道红灯20秒、黄灯4秒、红灯14秒,支干道绿灯10秒、黄灯4秒、红灯24秒。
主要功能:1、每一时间段内两组数码管都只有一个灯亮,并且颜色不同,能够实现数码管倒计时计时到零时能够自动的转换成下一个阶段,四个阶段交替周期进行。
2、在道路出现紧急情况时,能够手动中断控制使主道和支道的交通灯都变成红灯,并且紧急情况排除后能够手动控制恢复到原来中断前的状态有序执行。
3、能够报警,根据特殊情况的分类报警器(蜂鸣器)的发生的频率不一样,蜂鸣器的频率能够通过旋钮手动调节。
一、实验器材唐都TS-PITE试验箱,用到的芯片单元有8254单元.、8255单元、8259单元、LED显示单元、数码管显示单元、单脉冲产生单元、A/D 0809转换单元、蜂鸣器单元、时钟源。
二、实验原理与方法:1.、8259工作原理1、数据总线缓冲器:8259A与系统数据总线的接口,是8位双向三态缓冲器。
CPU与8259A之间的控制命令信息、状态信息以及中断类型信息,都是通过缓冲器传送的。
2、读/写控制逻辑:CPU通过它实现对8259A的读/写操作。
中断请求寄存器IRR:8位,用以分别保存8个中断请求信号,当响应的中断请求输入脚有中断请求时,该寄存器的相应位置1。
3、在试验中应用到8259的MIR7中断申请口,首先写入中断向量表中,将中断申请口接在KK1+上。
通过手动按下KK1+来决定是否产生中断。
4、中断子程序中必须用STI开中断否则会影响下一个中断的响应。
2、8254的工作原理1)8254是可编程的计数器/定时器,其内部有三个独立的16位计数器/定时器通道,每个计数器通道均可按6种不同的方式工作,并且都可以按二进制或十进制计数。
其CLK0~CLK2是计数器0~2的时钟脉冲输入端, GATE0~GATE2是门控脉冲输入端, OUT0~OUT2是输出端。
题目:简易交通灯
一、设计目的
利用TDN微机原理试验箱及单元电路,实现对一道路交通灯的控制。
当通过车辆计数达到50时,绿灯灭,红灯亮,同时数码块倒计时若干秒(此次设计中设为9秒)。
此时,车辆停止,行人可以通过。
二、参加人员及分工
李——试验报告
霍——调试程序
洪——编写程序
三、技术要求
1、设计完成交通灯的电路
2、采用TDN试验箱上的8255、8259、8253完成
3、程序设计中采用软件延时
四、试验器材
TDN-MD86/51实验箱一台,8253一片,8255一片,8259一片,数码管一组,发光二极管一组。
五、设计和调试环境
TDN-MD86/51教学试验系统
六、题目分析、工作原理、设计思想
题目分析
我们所做的交通灯是控制单路口处车辆和行人的通过及停止的简易交通灯。
因此需要两个灯和一块用于显示倒计时的数码块来控制车辆和行人的通行、停留问题。
其中两个灯分为红绿色,主要根据两只灯的亮灭情况来控制车辆,当红灯灭绿灯亮的时候车辆可以通过,而红灯亮绿灯灭时车辆就要停止通行。
数码块用于显示倒计时的时间以控制人,当倒计时开始时人通行,倒计时结束后行人就要等待。
根据题目分析得出以下设计思想及工作原理:
设计思想
在一开始启动交通灯时设置为红灯灭绿灯亮,让车辆先通行,行人等待,当通过50辆车后,红绿灯都同时灭然后红灯亮绿灯灭且数码快开始倒计时,此时为行人通行时间。
然后当数码块倒计时到0时行人通行的时间结束。
转而红灯灭绿灯亮又改为车辆通行时间。
红绿灯和数码块如此反复工作就构成的交通灯。
工作原理
通过向8259写入程序来控制其他器件的工作。
在程序一开始写入中断向量和各芯片的控制方式字,以确保发生中断是正确的响应中断及芯片正确的工作状态。
接下来的程序就是控制8255和8253,8255选择工作方式1,A、B、C、口都做基本的输入输出。
通过8255A 口先让红灯灭绿灯亮。
8253选择工作方式2:计数停止中断,通过8253对车辆的计数达到50辆车是就发出中断请求。
中断允许后就开始执行中断程序,此时通过8255的A口先让红
绿灯都灭再红灯亮绿灯灭,8255的B口控制数码块显示倒计时数据,8255的C口控制在那一块数码块上显示。
中断结束后跳转到上面控制8253和8255的程序处又继续依次执行。
七、电路图
系统硬件电路的设计:
整套电路系统由控制系统模块、交通灯输出控制显示模块、倒计时时显示模块组成。
交通灯输出显示采用高亮度红绿双色发光二极管,倒计时采用高亮红色7段LED发光数码管显示,采用共阳数码管。
系统电路图如下所示:
八、系统主要程序的设计
道口交通控制系统程序主要分为以下几个模块:初始化程序、主程序、定时中断程序和实时响应程序等。
源程序如下所示:
PUSH DS ;数据段入栈
MOV AX,0000H
MOV DS,AX
MOV AX,OFFSETB IRQ7
ADD AX,2000H
MOV SI,003C
MOV [SI],AX ;设置中断程序的偏移地址
MOV AX,0000H
MOV SI,003EH
MOV [SI],AX ;设置中断程序的段地址
A1: IN AL,21H
AND AL,7FH
OUT 21H,AL ;开中断7
MOV AL,90H
OUT 43H,AL ;设置芯片8253的工作方式
MOV AL,0FH
OUT AL,60H ;设置红灯灭绿灯亮
MOV AL,32H
OUT 42H,AL ;设置记数50次
MOV AL,FF
OUT 61H,AL ;设置在数码块上显示字符8
MOV AL,77H
OUT 62H,AL ;设置在第一个数码块上显示字符8
HLT
STI ;开中断标志位
JMP A1
IRQ7:MOV AL,FFH
OUT 61H,AL ;设置红绿灯全灭
CALL DALL Y ;调用延时程序
MOV AL,F0H
OUT 60H,AL ;设置红灯亮绿灯灭
CALL DALL Y ;调用延时程序
PUSH DS
MOV AX,0209H
MOV DS,AX
MOV SI,0000H
A2:MOV AL,[SI]
OUT 61H,AL ;设置显示字符9-0
MOV AL,77H
OUT 62H,AL ;设置第一个数码管亮
INC SI
CMP SI,000AH
JZ L1
CALL DALL Y ;调用延时程序
JMP A2
L1:POP DS
MOV AL,FFH
OUT 60H,AL ;设置红绿灯全灭
MOV AL,27H
OUT 20H,AL ;设置8259命令字OCW2
IRET ;中断返回主程序
DALL Y:PUSH CX
PUSH AX
MOV CX,00A0H
A3:MOV AX,056CH
A4:DEC AX
JNZ A4
LOOP A3 ;延时程序程序
POP AX
POP CX
RET
七段码的赋值
0209:0000 67H 0209:0005 66H
0209:0001 7FH 0209:0006 4FH
0209:0002 07H 0209:0007 5DH
0209:0003 7DH 0209:0008 5BH
0209:0004 6DH 0209:0009 06H
0209:000A 3FH
8255口地址:60H,61H、62H。
九、总结及心得体会
以前学过关于汇编语言的知识,这次课程设计正好让我们温习以前学过的知识。
同时也是对前一段时间所学习过的8255、8253、8259芯片的相关知识进行巩固。
我们选的题目是简易交通灯,我们的主要任务就是能模拟交通灯的工作方式。
在调试程序的过程中出现了许多的问题,但我们并不曾放弃过,在老师的细心指导和所有队员的共同努力下,我们一步一步解决困难,把所有问题都解决完,程序终于调试成功。
我们在这个过程中有很多自己的感受,我想很多同学都会和我有一样的感受,那就是感觉汇编语言真的是很神奇,很有意思。
我想微机原理课程设计和其他课程设计有共同的地方,温习了旧知识的同时也锻炼了我们的动手能力和团队精神。
最后,再一次真诚的感谢我们的指导老师,谢谢她的细心指导。
附录
1、微机原理及接口技术试验指导书
2、微型计算机原理与应用。