机械设计基础运动简图设计1
- 格式:ppt
- 大小:2.23 MB
- 文档页数:40
第1章机械系统的运动简图设计一、基本内容及要求本章学习的主要内容是:(1)平面运动副及其分类;(2)平面机构运动简图的绘制方法;(3)平面机构自由度的计算。
本章的学习要求:1. 掌握各种平面运动副的一般表示方法。
能较熟练看懂教材中的平面机构运动简图。
通过实验初步掌握将实际机构绘制成机构运动简图的技能。
2. 能够识别平面机构运动简图中的复合铰链、局部自由度和最常见的虚约束。
会运用公式计算平面机构的自由度并判断其运动是否确定。
看懂和绘制平面机构运动简图是本章的重点。
复合铰链、局部自由度和虚约束的判断是个难点。
只要求掌握教材中列举的几种实例,不宜在此花费过多时间。
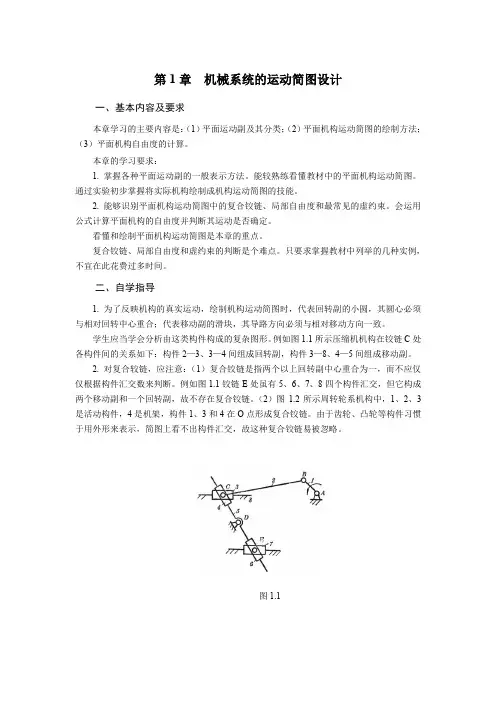
二、自学指导1. 为了反映机构的真实运动,绘制机构运动简图时,代表回转副的小圆,其圆心必须与相对回转中心重合;代表移动副的滑块,其导路方向必须与相对移动方向一致。
学生应当学会分析由这类构件构成的复杂图形。
例如图1.1所示压缩机机构在铰链C处各构件间的关系如下:构件2—3、3—4间组成回转副,构件3—8、4—5间组成移动副。
2. 对复合较链,应注意:(1)复合铰链是指两个以上回转副中心重合为一,而不应仅仅根据构件汇交数来判断。
例如图1.1铰链E处虽有5、6、7、8四个构件汇交,但它构成两个移动副和一个回转副,故不存在复合铰链。
(2)图1.2所示周转轮系机构中,1、2、3是活动构件,4是机架,构件1、3和4在O点形成复合铰链。
由于齿轮、凸轮等构件习惯于用外形来表示,简图上看不出构件汇交,故这种复合铰链易被忽略。
图1.13. 局部自由度在平面机构中主要出现在有滚子的场合。
在计算自由度时,为了防止错算构件数和运动副数,建议将图1.3,a中的滚子及其安装件固联为一整体,如图1.3,b所示。
图1.2 图1.34. 虚约束比较复杂,不要求深入研究,只要求理解和熟悉以下几个实例:(1)由两构件组成多个导路平行的移动副而产生的虚约束;(2)轮系中的对称部分产生的虚约束;(3)在平行四边形机构中加入一个与某边平行且相等的构件造成轨迹重迭而产生的虚约束(其他类型的轨迹重迭往往需要复杂的数学证明,可不深究);(4)“两构件间组成多个轴线重合的回转副”,这类虚约束通常出现在轮系的侧视图中,在运动平面内绘制的机构运动简图不会出现这类虚约束。
第五章机械设计基础第一节平面连杆机构一、平面机构的运动简图1.运动副及其分类▪运动副▪分类:▪高副、低副低副转动副移动副球面副、螺旋副高副凸轮副2.平面机构的运动简图⏹固定件⏹原动件⏹从动件机构运动简图符号:3.平面机构的自由度 计算公式其中F —自由度,n —活动机构数,p L --低副的数目,p H --高副的数目HL p p n F --=23例1:计算如图所示的内燃机中曲柄连杆机构的自由度。
例2:计算如图所示的牛头刨床传动机构的自由度。
⏹注意的问题⏹复合铰链例3:计算如图所示的圆盘锯主体机构(直线机构)的自由度。
B、C、D、E四处都是复合铰链,各由2个转动副。
复合铰链⏹局部自由度⏹例4:计算如图所示的滚子从动件凸轮机构的自由度。
二、四连杆机构的基本类型1.铰链四杆机构曲柄摇杆机构双曲柄机构双摇杆机构2.偏心轮机构3.曲柄滑块机构4.导杆机构第二节凸轮机构一、分类1.按凸轮的形状分盘形凸轮移动凸轮圆柱凸轮2.按从动轮的型式分⏹尖顶从动件⏹滚子从动件⏹平底从动件二、从动件的常用运动规律1.等速运动1---凸轮的转角,s---工作行程2.等加速等减速运动1---凸轮的转角,s---工作行程3.摆线运动1---凸轮的转角,s---工作行程三、按给定从动件运动规律绘制凸轮轮廓1.理论轮廓2.实际轮廓习题设计一直动滚子从动件盘形凸轮。
已知凸轮顺时针匀速回转,从动件的运动规律为:当凸轮转过120°时,从动件以等加速等减速运动规律上升20mm;当凸轮继续回转60°时,从动件在最高位置停留不动;当凸轮再转90°时,从动件以等加速等减速运动规律下降到初始位置;当凸轮再转其余90°时,从动件停留不动。
今取凸轮基圆半径l OB1=50mm,滚子半径r=10mm,并要求滚子中心沿着通过凸轮回转中心的直线运动。
试绘出此凸轮的轮廓。
第三节间歇运动机构一、槽轮机构1.组成:由具有径向槽的槽轮2、具有圆销的机构1和机架组成。

机械设计基础第1章运动简图ppt课件•运动简图概述•机构运动简图绘制方法•平面连杆机构运动简图分析•凸轮机构运动简图分析目•齿轮机构运动简图分析•轮系运动简图分析录运动简图概述01运动简图定义与作用定义运动简图是用简单的线条和符号来表示机构运动情况的图形。
作用能够清晰地表达机构的组成、运动传递关系和运动特性,是机械设计中的重要工具。
在保证能够准确表达机构运动情况的前提下,尽量简化图形,突出重点。
简化原则图形应清晰易懂,符号、线条和标注应符合规范。
清晰原则应完整地表达机构的组成、运动传递关系和运动特性,不遗漏任何重要信息。
完整性原则运动简图绘制原则机构运动分析机构设计优化机构故障诊断机构创新设计运动简图在机械设计中的应用通过运动简图可以直观地了解机构的运动情况,包括速度、加速度、位移等运动参数的变化规律。
通过对机构运动简图的观察和分析,可以发现机构中存在的故障和隐患,为故障诊断和维修提供依据。
根据运动简图的分析结果,可以对机构进行优化设计,提高机构的性能和使用寿命。
通过对不同机构运动简图的比较和分析,可以启发设计人员的创新思维,探索新的机构设计方案。
机构运动简图绘制方02法高副两构件通过点或线接触而构成的运动副。
高副能同时承受两个方向的力,具有较高的承载能力和较小的摩擦损失,但制造和维修较为困难。
机构组成机构是由刚性构件通过运动副连接而成的系统。
构件是机构中的运动单元,可以是单一的整体,也可以是几个零件组成的刚体。
运动副类型运动副是两构件直接接触并能产生相对运动的活动联接。
根据接触形式的不同,运动副可分为低副和高副两大类。
低副两构件通过面接触而构成的运动副。
根据两构件的相对运动形式,低副可分为转动副和移动副两种。
机构组成及运动副类型机构运动简图符号表示法构件的表示在机构运动简图中,构件用直线或折线表示,长度与实际构件的大小无关,只表示构件间的相对位置关系。
运动副的表示转动副和移动副分别用特定的符号表示。
机械设计基础课程设计题目:单级圆柱直齿轮减速器学生姓名:学号:专业班级:指导教师:日期:2020年6月16日(划线内容填写:小3号宋体居中)目录一、设计任务书 (1)二、电动机的选择 (4)三、总传动比及各级传动比、参数的确定 (5)四、传动零件的设计计算 (6)五、轴、轴承的设计计算 (8)六、减速器的润滑 (13)七、附件图纸 (13)八、设计小结 (18)九、课程设计评语 (19)一设计任务书(1 )该传送设备的传动系统由电动机—运输带—减速器组成。
单级减速器运动简图1—电动机; 2 V带;3—减速器;4—联轴器;5—滚筒,6-传送带(2)、原始数据:滚筒直径(mm)=200传送带运行速度(m/s)=1.4传送带所需牵引力F(N)=2733要求传送带载荷平稳,连续单向运转,工作年限10年,每年300个工作日,每天工作12小时。
(3)设计任务与要求:A、电动机的选择;B、传动装置运动和动力参数的确定和计算;C、主要零件的设计计算;D、减速器装配图和零件工作图的绘制;E、设计说明书的编写。
二电动机的选择正文(字体:宋体小四。
行间距,1.5倍行距,以下均相同)三、总传动比及各级传动比、参数的确定四、传动零件的设计计算五、轴、轴承的设计计算六、减速器的润滑1.齿轮的润滑因齿轮的圆周速度<12 m/s,所以采用浸油润滑的润滑方式。
润滑油牌号选用L-AN32;低速速齿轮浸入油里约为1个齿高但不小于10mm。
2.滚动轴承的润滑因润滑油中的传动零件(齿轮)的圆周速度V≤1.5~2m/s 所以采用油脂润滑。
润滑脂选用钠基润滑脂。
七、附件图纸八、设计小结课程设计是机械设计当中的一个非常重要的一环,通过本次课程设计,从中得到的收获还是非常多的。
这次的课程设计对于我来说有着深刻的意义。
这种意义不光是我能够完成设计任务,更重要的是在这段时间内使我深刻感受到设计工作的那份艰难。
而这份艰难不仅仅体现在设计内容与过程中为了精益求精所付出的艰辛,更重要的是为每一个精细数字的付出!这次课程设计的题目是设计一个一级圆柱齿轮减速器,由于我理论知识的不足,再加上平时没有什么设计经验,一开始的时候有些手忙脚乱,不知从何入手,很迷茫。