KUKA机器人C4外部轴配置
- 格式:pdf
- 大小:893.06 KB
- 文档页数:6

KUKA外部轴配置方法,偷偷分享的1、连接控制柜和外部轴的动力线和编码器线
(外部轴动力线)
(连接机器人底部RDC编码器线)
2、Workvisual外部轴添加与配置
(1)根据机器人控制柜内部实际的KPP和KSP型号添加:(右键控制系统组件添加)
(2)确认电机铭牌上的电机型号:
(开头MG/ME光轴与键槽轴的区别)
(3)根据电机型号添加选项:
(右键设备视图添加电机型号)
(4)在单元配置中将添加的外部轴电机与控制柜连接:(拖住电机连接控制柜)
(5)右键电机--驱动装置配置--(根据实际接线图连接电机):
(外部轴电机连接错误,导入项目提示报警编码器故障):
(6)右键电机--机器参数配置(配置电机需要的参数):
(7)配置完成后,项目编译导入机器人控制柜。
(8)导入项目后进行安全配置:(注意切换安全员用户)
(9)外部轴零点丢失(进行零点校正):
(10)外部轴动作方式的切换:。
9 / 181发布日期: 15.02.2011 版本: KSS 8.2 END V1 zh 1 引言1引言1.1目标群体本文献针对具有下列知识的用户:⏹具备有关工业机器人的基本知识1.2工业机器人文献工业机器人文献由以下部分组成:⏹机器人机械装置文献⏹机器人控制器文献⏹库卡系统软件操作及编程指南⏹选项及附件指南⏹保存在数据载体上的部件目录每份指南均独立成篇。
1.3提示的图示安全这些说明是安全提示,必须遵守。
提示这些提示可使工作便利或提供进一步信息的说明。
1.4商标Windows 是微软公司的商标。
WordPad 是微软公司的商标。
我们推荐客户在库卡学院进行培训,以便能以最佳方式使用我们的产品。
有关培训项目信息请访问公司主页 或直接在公司分支机构处获得。
该提示表示,如果不采取预防措施,则将导致死亡或严重的身体伤害。
该提示表示,如果不采取预防措施,则可能导致死亡或严重的身体伤害。
该提示表示,如果不采取预防措施,则可能导致轻微的身体伤害。
该提示表示,如果不采取预防措施,则可能导致财产损失。
该提示包含安全相关信息的说明或通用安全措施。
该提示不针对个别的危险或个别的预防措施。
用来使工作便利或提供进一步说明信息的提示。
全球独家推出 全覆盖型省配线解决方案库卡系统软件 8.210 / 181发布日期: 15.02.2011 版本: KSS 8.2 END V1 zh11 / 181发布日期: 15.02.2011 版本: KSS 8.2 END V1 zh 2 产品说明2产品说明2.1工业机器人概览工业机器人由下列部件构成:⏹机械手⏹机器人控制器⏹手持式编程器⏹连接线缆⏹软件⏹选项,附件2.2软件组成部分概览概览下列软件组成部分被应用:⏹库卡系统软件 8.2⏹Windows XPe V3.0.02.3库卡系统软件概览 (KSS)说明库卡系统软件 (KSS) 承担着工业机器人运行所需的所有基本功能。
⏹轨道设计⏹I/O 管理⏹数据与文件管理⏹等系统中可能还装有其它的工艺数据包,包含与应用程序相关的指令和配置。
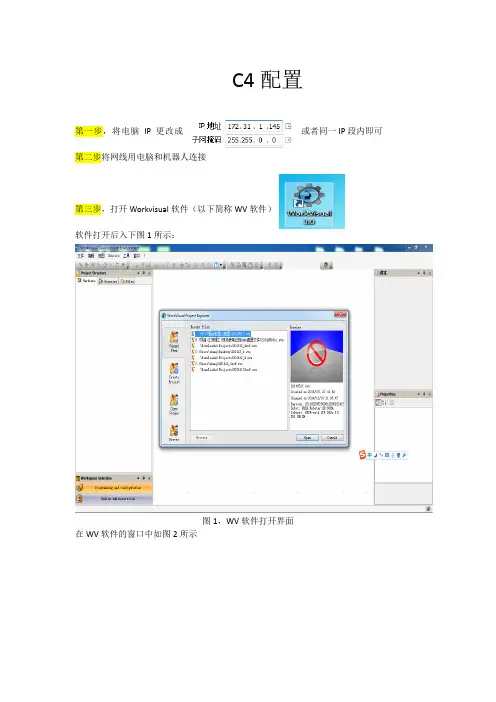
C4配置第一步,将电脑IP更改成或者同一IP段内即可第二步将网线用电脑和机器人连接第三步,打开Workvisual软件(以下简称WV软件)软件打开后入下图1所示:图1,WV软件打开界面在WV软件的窗口中如图2所示以前打开过的文档新建WV文档打开文档浏览在线机器人中的文档图2项目文件选择当选择Browse时,界面如图3所示点击刷新,即可显示,当前连接的机器人图3刷新后显示项目文件,带:绿色箭头”标志的为当前项目。
备注:在打开项目后将当前项目另存为文件,以免将原来的项目覆盖,在出问题时可以用此项目恢复。
打开VW文件后,界面如图4所示图4第四步,拍下外部轴点机的型号,如图5查找点机的Art-Nr 号,对应kuka文件查找电机的型号此处的数字为电机的订货号例如图5中的电机订货号后六位是121216,参考kuka文件中如图6,可查出电机型号为MX_110_130_40_S0图6第五步,现在开始添加外部轴,当kuka机器人有两个外部轴系统时,原则上先添加直线导轨外部系统,再配旋转轴外部系统。
下面配置示例的就是直线导轨外部轴单击geometric view项中右击添加Mx_110_130_40_S0,如图7图7 添加外部轴电机添加完后把KR60HA_3拖到MX_60_110_30_S0的FLANGE BASE下面,如图8电机型号电机订货号单击右下角添加Mx_110_130_40_S0,如图9保存——》设置参数——》保存——》编译,参数设置在如图10中图10参数主要有限位,电机转向,轴的类型,减速比等参数轴类型Linear 直线导轨Rotatory 旋转轴Endless 无限旋转轴电机转向,正负电机负限位电机正限位减速比电机负限位电机正限位注:如果需要做耦合,就必须将坐标转换值输入进去,数值由实际测量得出坐标转换值旋转轴配置和上面步骤相同,除了这步:添加完后把KR60HA_3拖到MX_60_110_30_S0的FLANGE BASE下面,如图8,这步配置旋转轴时不需要执行:文件/名录管理,把所有的文件移至右边。



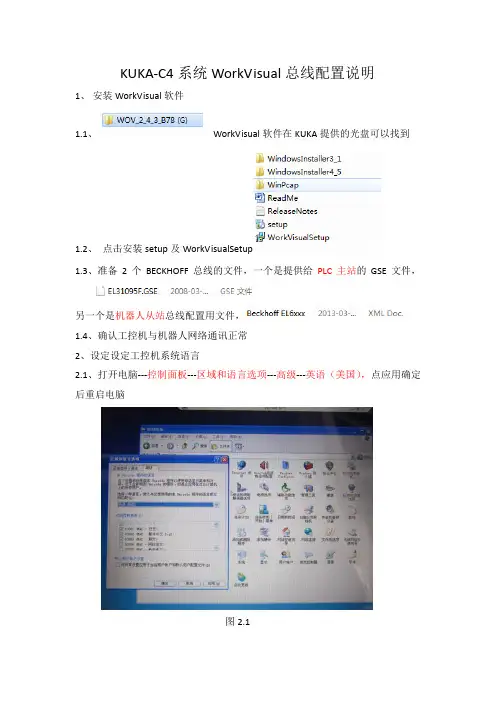
KUKA-C4系统WorkVisual总线配置说明1、安装WorkVisual软件1.1、WorkVisual软件在KUKA提供的光盘可以找到1.2、点击安装setup及WorkVisualSetup1.3、准备2个BECKHOFF总线的文件,一个是提供给PLC主站的GSE文件,另一个是机器人从站总线配置用文件,1.4、确认工控机与机器人网络通讯正常2、设定设定工控机系统语言2.1、打开电脑---控制面板---区域和语言选项---高级---英语(美国),点应用确定后重启电脑图2.12.2、设定机器人系统语言图2.22.3、下载项目时,先将机器人设置为安全模式图2.33、打开WorkVisual软件3.1、打开软件后显示对话框,点击退出,如图3.1图3.13.2、导入机器人从站配置文件如图3.2点击File---Import/Export 如图3.2图3.2下一步选择Import device descriction file---Next---选择要导入的文件,如图3.3图3.3下一步文件类型,选择EtherCAT ESI,点打开,如图3.4图3.4下一步点NEXT,如图3.5图3.5 完成导入ESI文件,如图3.6图3.64、打开DTM样本管理首先点击Extras---DTM Catalog Management---,如图图4.1.4则为导入完成,最后点击OK完成,如图4.1图4.1下一步点击Search for Installed DTMs---软件自动搜索DTM文件,如图4.2图4.2 DTM文件搜索过程中,如图4.3图4.3 下一步需要确认文件是否导入到DTM中,确认完成点OK,如图4.4图4.4 5、打开机器人项目首先点击File---Open Project,如图5.1图5.1下一步点击Browse找到当前机器人的项目点Open 如图5.2图5.2 下一步右键点击Steuerung---激活当前控制器Set as active controller如图5.3图5.3下一步右键点击EL6731-0010-PROFIBUS SLAVE---Add如图5.4图5.4下一步在DTM Selection窗口下选择EL6731-0010这项,并点击OK,如图5.5图5.5下一步完成添加后,出现一个减号图标, 如图5.5图5.56、进行机器人从站地址设定及I/O的分配首先双击EL6731-0010-PROFIBUS Slave,出现图6.1右边窗口,将Device ID设为与PLC设定从站相同的地址,如图6.1图6.1下一步双击EL6731-0010,设定输入输出的数量,现设为8 word字,1word=2byte(字节)1byte=8bit(位)通常所说的点,16*8=128个输入/输出点,先点一下左边Slot(1),再双击右边窗口,输入/输出各一组,完成后点APPLY---OK,如图6.2图6.2 下一步点击左侧KRC I/Os---Digital Inputs,再点击右侧Fieldbusses---点EL6731-0010图6.3下一步需要将左下侧窗口BOOL转换为BYTE,每次选8个为一组,如图6.4图6.4下一步点右键选择Group,如图6.5图6.5下一步选择BYTE,如图6.6图6.6下一步将右下侧窗口点击一组BYTE,按住向左边拖放,如图6.7图6.7 重复图6.4、6.5、6.6、6.7步骤,完成输入输出各128个,下一步先确认机器人登录用户为安全模式后,再点击编译在编译过程中不能有报错提示,并保存项目。

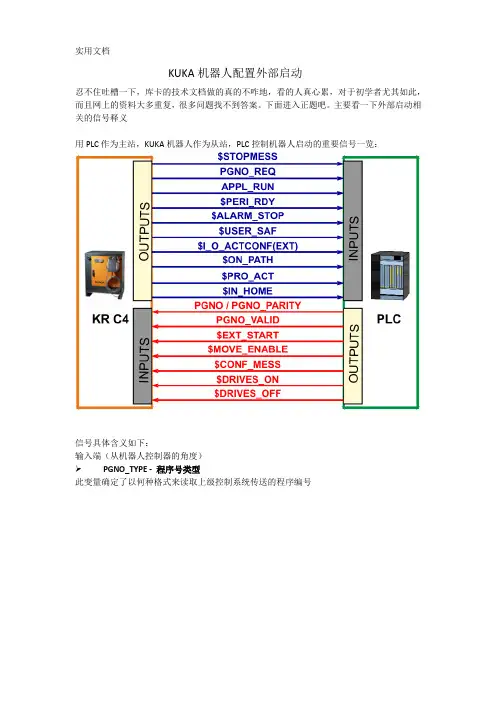
KUKA机器人配置外部启动忍不住吐槽一下,库卡的技术文档做的真的不咋地,看的人真心累,对于初学者尤其如此,而且网上的资料大多重复,很多问题找不到答案。
下面进入正题吧。
主要看一下外部启动相关的信号释义用PLC作为主站,KUKA机器人作为从站,PLC控制机器人启动的重要信号一览:信号具体含义如下:输入端(从机器人控制器的角度)➢PGNO_TYPE - 程序号类型此变量确定了以何种格式来读取上级控制系统传送的程序编号* 采用这种传递格式时,未对PGNO_REQ、PGNO_PARITY 以及PGNO_VALID 的值进行分析,因此无意义。
一般情况下设该值为1,符合大多数读写习惯➢PGNO_LENGTH - 程序号长度此变量确定了上级控制系统传送的程序编号的位宽。
值域:1 …16。
若PGNO_TYPE 的值为2,则只允许位宽为4、8、12 和16。
程序号变量所占用得地址宽度,例如设为8,则PGNO变量占一个BYTE➢PGNO_PARITY - 程序号的奇偶位上级控制系统传递奇偶位的输入端。
如果PGNO_TYPE 值为3,则PGNO_PARITY 不被分析。
这个没看太明白,但是不能胡乱设置,会影响程序号的传递。
目前设成0没发现问题➢PGNO_VALID - 程序号有效上级控制系统传送读取程序号指令的输入端。
这个信号别看太多了,只要知道是占用1bit的开关量信号就行了,在机器人启动并给定程序号后,发送该信号给机器人,相当于确认信号。
(忍不住也吐槽一下,就一个位信号,他这表格里说的正值,负值和0是指哪个,不明白唉)➢$EXT_START - 外部启动这个就简单直白了,启动信号,上升沿有效,可以给出去一段时间后撤销。
➢$MOVE_ENABLE - 允许运行由PLC给机器人的,配置Profinet后,该信号是机器人运动的必要前提条件,不管是EXT 模式还是T1模式,该信号必须给定并保持。
➢$CONF_MESS - 确认信息提示上升沿有效,相当于故障复位信号。
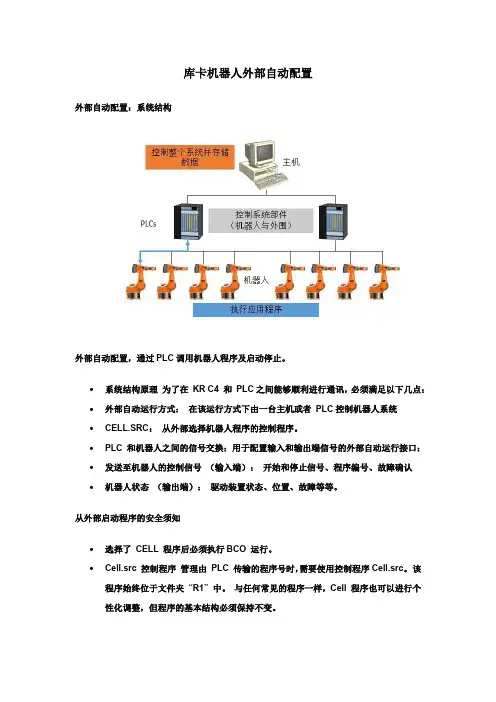
库卡机器人外部自动配置外部自动配置:系统结构外部自动配置,通过PLC调用机器人程序及启动停止。
∙系统结构原理为了在KR C4 和PLC之间能够顺利进行通讯,必须满足以下几点:∙外部自动运行方式:在该运行方式下由一台主机或者PLC控制机器人系统∙CELL.SRC:从外部选择机器人程序的控制程序。
∙PLC 和机器人之间的信号交换:用于配置输入和输出端信号的外部自动运行接口:∙发送至机器人的控制信号(输入端):开始和停止信号、程序编号、故障确认∙机器人状态(输出端):驱动装置状态、位置、故障等等。
从外部启动程序的安全须知∙选择了CELL 程序后必须执行BCO 运行。
∙Cell.src 控制程序管理由PLC 传输的程序号时,需要使用控制程序Cell.src。
该程序始终位于文件夹“R1” 中。
与任何常见的程序一样,Cell 程序也可以进行个性化调整,但程序的基本结构必须保持不变。
Cell程序的结构和功能:1、初始化和Home 位置∙初始化基坐标参数∙根据“Home” 位置检查机器人位置∙初始化外部自动运行接口2、无限循环:∙通过模块“P00” 询问程序号∙进入已经确定程序号的选择循环。
3 、程序号的选择循环∙根据程序号(保存在变量“PGNO” 中)跳转至相应的分支(“CASE”) 中。
∙记录在分支中的机器人程序即被运行。
∙无效的程序号会导致程序跳转至“ 默认的” 分支中。
∙运行成功结束后会自动重复这一循环。
更改CELL•操作步骤:1. 切换到“ 专家” 用户组2.打开CELL.SRC。
3.在“CASE” 段中将名称“EXAMPLE” 用•应从相应的程序编号调出的程序的•名称替换。
删除名称前的分号。
4. 关闭程序并保存更改更改外部自动接口,根据标准填写输入接口信号。
输出信号变量说明∙PERI_RDY 通过设定这个输出,机器人控制器与主计算机通讯驱动器接通的细节ALARM_STOP 在急停情况下复位该输出。
正常一直为1,急停为0 ∙USER_SAF如果安全栅栏监控开关被打开(在AUTO方式下)或使能开关被释放(在TEST方式下)复位该输出。
KUKA KRC4机器人应用标准在当今高度自动化的时代,机器人技术正在快速发展,广泛应用于各种行业和领域。
其中,KUKA KRC4机器人是一款具有革命性的四轴机器人,以其高效、精准和灵活的操作性能,赢得了全球的。
本文将详细介绍KUKA KRC4机器人应用标准及其在各行业的应用情况。
一、KUKA KRC4机器人简介KUKA KRC4机器人是一款高度灵活的四轴机器人,具有出色的运动性能和操作精度。
它采用先进的伺服控制系统和精密的编码器技术,可以实现高精度的位置控制和速度控制。
KRC4机器人还配备了多种传感器,包括视觉、触觉、力觉等,可以实时感知周围环境并进行相应的调整,确保操作的安全性和准确性。
二、KUKA KRC4机器人应用标准1、安全性标准在机器人应用中,安全性是首要考虑的因素。
KUKA KRC4机器人遵循严格的安全性标准,包括机械安全、电气安全、软件安全等。
它采用防护装置和安全控制程序,确保在异常情况下能够及时停机并避免对人员和设备造成伤害。
2、精度标准KUKA KRC4机器人的精度取决于其伺服控制系统和编码器技术的性能。
为了达到高精度的操作效果,KRC4机器人采用了先进的误差补偿技术和精密的标定方法,确保机器人在各种操作条件下都能够实现高精度的位置控制和速度控制。
3、可靠性标准KUKA KRC4机器人采用了高品质的零部件和材料,并经过严格的可靠性测试,以确保机器人在各种恶劣环境下都能够稳定运行。
KRC4机器人还配备了故障诊断和预测功能,可以在出现故障前及时发现并采取相应的措施,确保机器人的可靠性。
三、KUKA KRC4机器人在各行业的应用情况1、汽车制造业在汽车制造业中,KUKA KRC4机器人的高精度和高效率使其成为汽车生产的理想选择。
它可以用于汽车零部件的装配、焊接、涂装等环节,提高了生产效率和产品质量。
2、电子制造业电子制造业对生产过程中的精度和稳定性要求非常高。
KUKA KRC4机器人的高精度和可靠性使其在电子制造业中得到广泛应用,如半导体制造、平板显示器制造等。
机器人外部轴适配说明
机器人外部轴是指除机器人本体轴以外的轴。
通常用旋转轴,翻转轴,直线轨道作为机器人外部轴。
增加外部轴需按如下步骤:
一、外部接线
1.CRP系统与伺服驱动器接线。
(信号线,通讯线,刹车信号线)
2.伺服驱动器与伺服电机接线。
(编码器线,动力线,电机刹车线)
3.伺服驱动器的强电线。
(单相与三相要区分,刹车电阻据情况连接)
二、CRP系统端设置参数
1.伺服参数
根据情况设置,如:儒竟的反馈脉冲数为1500。
根据实际情况设置增量和绝对。
根据外部驱动类型设置,如:儒竟为17。
根据驱动类型不同设置。
2.机构参数
根据其减速机的减速比设置。
或者是减速机乘以传动机构整体减速比。
附加轴设置为1。
(0代表没有外部轴,1代表加了外部轴。
)
3.速度参数
根据实际情况设置。
如果最大速度为1,外部轴几乎看不出转动。
三、伺服驱动端设置参数
以儒竟伺服设置为例,红色为与系统通讯必设参数,其他参数根据实
际情况实时调整。
注:1.驱动接线应注意强电,是三相还是单相。
2.系统到伺服的信号线是否匹配。
3.刹车线的输入输出区分开。