基于神经网络的机器人逆运动学求解
- 格式:pdf
- 大小:5.36 MB
- 文档页数:83
基于残差BP神经网络的Baxter机器人逆运动学分析方法赵杨鑫;曹旭;余志强;潘雨欣;方田;汪婧;沈浩【期刊名称】《安徽工业大学学报(自然科学版)》【年(卷),期】2024(41)2【摘要】提出1种基于残差BP(back propagation)神经网络的自适应逆运动学分析方法,围绕数据采集至实时控制的整个运动规划流程,采集140组位置和欧拉角数据,利用残差BP神经网络对Baxter机械臂进行逆运动学分析,拟合得到机械臂7个关节角度;将训练好的关节角度以话题的形式发布,通过在抓取物体的脚本中订阅该话题实现通讯;结合Rviz进行可视化展示和实物双臂协同实验,对4种物体模型分别用残差BP神经网络和普通BP神经网络进行抓取实验,验证所提方法的有效性。
结果表明:所提方法的计算单点时间约8.1 ms,远小于机械臂的控制周期,可实现实时性的要求;在进行1500次训练的情况下,残差BP神经网络模型的均方误差为0.006,相比普通BP神经网络模型,误差降低0.077,提高了模型的准确性;所提方法的抓取成功率为87.5%,比普通BP神经网络提高了22.5%,验证了本文所提方法的有效性和实用性。
【总页数】8页(P165-172)【作者】赵杨鑫;曹旭;余志强;潘雨欣;方田;汪婧;沈浩【作者单位】安徽工业大学电气与信息工程学院;中冶华天工程技术有限公司【正文语种】中文【中图分类】TP273.5【相关文献】1.基于BP神经网络的机器人运动学逆解新算法2.基于BP神经网络的6DOF喷漆机器人逆运动学研究3.基于三个并行BP神经网络的机器人逆运动学求解4.基于MEA-BP神经网络的6DOF工业机器人逆运动学研究5.基于BP神经网络的机器人逆运动学新算法因版权原因,仅展示原文概要,查看原文内容请购买。
基于RBF神经网络的机械手逆运动学求解
惠记庄;陈兆鲁;代然;胡浩
【期刊名称】《制造业自动化》
【年(卷),期】2015(000)020
【摘要】针对用于求运动学逆解的代数法存在计算量大、求解精度低等问题,提出了一种将RBF神经网络与正交最小二乘法相结合的求解方法。
根据RBF神经网络的非线性局部逼近能力及快速学习能力,确定了进行运动学逆解所要的RBF神经网络参数,利用正交最小二乘算法对RBF神经网络进行稳定性训练,并设计了其逆运动学求解的算法流程图。
运用MATLAB软件对该算法进行仿真分析,结果表明采用该方法能有效减少人工计算量且具有较高求解精度。
【总页数】4页(P28-30,35)
【作者】惠记庄;陈兆鲁;代然;胡浩
【作者单位】长安大学道路施工技术与装备教育部重点实验室,西安 710064;长安大学道路施工技术与装备教育部重点实验室,西安 710064;长安大学道路施工技术与装备教育部重点实验室,西安 710064;长安大学道路施工技术与装备教育部重点实验室,西安 710064
【正文语种】中文
【中图分类】TH12
【相关文献】
1.基于模糊RBF神经网络的冗余机械手运动学逆解 [J], 罗小平;韦巍
2.基于LS-SVM的水火弯板机械手逆运动学求解 [J], 李彦;王玲
3.基于免疫RBF神经网络的逆运动学求解 [J], 魏娟;杨恢先;谢海霞
4.基于D-H参数法的二自由度并联机械手逆运动学求解 [J], 于丰博;杨惠忠;卿兆波
5.基于唯一特征的BP神经网络求解平面2R机械手逆运动学 [J], 肖帆; 李光; 游雨龙
因版权原因,仅展示原文概要,查看原文内容请购买。
基于神经网络的双足机器人逆运动学求解*李霞,谢涛,陈维山(哈尔滨工业大学机械电子工程教研室,黑龙江哈尔滨150001)摘要:运动学求解是双足机器人步态规划的基础。
针对HIT-Ó双足机器人实体,利用BP神经网络,求解了双足步行机器人逆运动学问题。
为了满足机器人在线实时控制的要求及进一步提高运算精度,提出用迭代计算进行误差补偿的方法。
计算结果表明,该法迭代次数少,计算精度高。
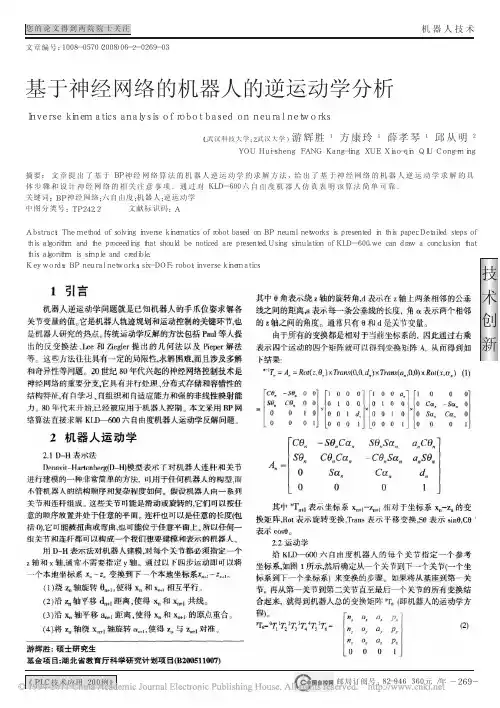
关键词:双足步行机器人;逆运动学问题;神经网络;误差补偿中图分类号:T242.3文献标识码:A文章编号:1001-2354(2003)04-0036-03双足机器人的逆运动学可以描述为给定摆动腿的期望位姿,求解各关节角使机器人满足这个位姿的问题,即已知运动学正解映射f:Q y S和一期望的位姿s I S,通过求解f(H)= s来获得H I Q。
逆运动学求解比正运动学求解复杂得多,主要表现在解的存在性和唯一性。
存在性是指在数学上至少存在一组关节变量来产生希望的机器人位姿。
唯一性是指在数学上仅有一组确定的关节变量来产生希望的机器人位姿。
运动学逆解可能有多解、唯一解或无解,且不一定存在闭式逆解。
逆运动学问题的一般解法是,当机器人至少存在相交轴线时,将逆运动学问题分解为几个典型的子问题来求解[1]。
已经证明:只有三个相邻关节轴满足交于一点或相互平行的条件下,才能获得一组封闭形式的解[2]。
对于H IT-Ó双足机器人来说,其相邻关节轴之间不满足这个条件,故不能获得解析形式的关节角的值。
因此,不得不使用某种数值算法,逆运动学问题成为一个非线性超越方程的数值求解问题。
但这种数值求解问题存在两个困难:一是它一般不能给出全部可能的解;二是现在的机器人控制系统通常要求实时计算逆运动学,因而必须具有快速性质,而常规的数值解法的迭代性质使得解的精度不高或花时太多。
人工神经网络在解决非线性映射方面的问题时有强大的逼近能力,在机器人领域可用于操作手运动学及动力学模型的自动辨识、障碍回避与路径优化以及机器人控制等一系列问题[3]。
基于人工神经网络的逆问题求解研究人工神经网络是近年来最受关注的研究领域之一,因其能够模拟人脑神经系统的特点,将生物学意义上的神经元转化为数学模型,在解决实际问题中发挥了重要作用。
逆问题求解是一类在实际中有着广泛应用的问题,涉及到从观测值中得出模型参数或者初始条件等已知量的求解过程。
基于人工神经网络的逆问题求解能够有效地解决很多实际问题。
本文将重点介绍基于人工神经网络的逆问题求解的研究现状和存在的问题,并提出一些解决问题的思路和方法。
一、基于神经网络的逆问题求解原理在基于神经网络的逆问题求解中,首先需要将逆问题转化为正问题。
正问题是指从问题的初始条件出发,通过模型得到该问题的解。
逆问题则是根据问题的解来推导出模型的初始条件。
因此,逆问题的求解过程可以看作是一个从不确定的初始条件中推导出准确解的过程。
以一个简单的例子来说明逆问题的求解过程。
假设存在方程f(x) = y,其中f(x)为一个带有噪声的函数,y为一个给定的输出向量。
逆问题就是要求出x的值,以便得到f(x) = y。
通常情况下,我们只能得到y的观测值,而f(x)和x的值则需要通过求解逆问题才能得到。
神经网络的主要任务就是根据给定的输入与输出数据训练一个模型来预测未知的输出值。
在逆问题求解中,可以将神经网络看作是一个映射函数f,将x映射为y。
反向传播算法是常用的训练神经网络的方法,它是一种基于梯度下降的方法,通过优化神经网络的权重和偏置来最小化预测值与实际值的差距。
因此,在逆问题求解中,可以通过反向传播算法来训练神经网络,并将训练得到的模型应用于逆问题求解中。
二、基于神经网络的逆问题求解应用案例基于神经网络的逆问题求解已经在很多领域得到了广泛应用。
以下是一些典型案例。
1. 医学成像领域医学成像领域的逆问题求解涉及到如何从成像数据中推断出病人的生理指标,比如心脏大小、肺活量等。
以CT成像为例,它是一种通过X射线扫描得到病人内部结构图像的技术。
由于X射线具有一定的穿透性,因此在成像过程中,会因为受到各种杂质的影响,数据中会出现大量的噪声和畸变。
基于RBF神经网络的ABB-IRB460码垛机器人逆运动学算法李海军;胡平;林成钱;泮李津;张存敏【摘要】为解决传统逆运动学求解速度慢和精度低等问题,以流行的ABB-IRB460码垛机器人为研究对象,根据其物理构造和运动特点,将RBF神经网络应用于该型机器人的运动学逆解问题中,同时采用基于K-means++的聚类算法对RBF网络进行训练.实验结果显示:所提方法能提高网络训练速度,并降低网络输出误差,是一种有效的ABB-IRB460码垛机器人的运动学逆解方法,且求解精度较高,实时性能较好.【期刊名称】《金华职业技术学院学报》【年(卷),期】2017(017)006【总页数】5页(P68-72)【关键词】码垛机器人;逆运动学;K-means++;RBF神经网络;运动轨迹规划【作者】李海军;胡平;林成钱;泮李津;张存敏【作者单位】金华职业技术学院,浙江金华321007;金华职业技术学院,浙江金华321007;金华职业技术学院,浙江金华321007;金华职业技术学院,浙江金华321007;金华职业技术学院,浙江金华321007【正文语种】中文【中图分类】TP241.3码垛机器人是用在工业生产过程中执行大批量工件、包装件的获取、搬运、码垛、拆垛等任务的一类工业机器人,是现代工业生产应用最为广泛的一类智能机器人。
码垛机器人的智能控制系统主要负责机器人的运动轨迹规划和实时运动控制,其数学基础是机器人运动学,此类问题一直是机器人和人工智能领域的研究热点。
机器人运动学描述了机械运动关节与机器人运动组件(如连杆等)的各刚体之间的运动关系,它包括正逆两类问题,当已知末端执行器的位置和姿态,反求关节角时称为运动学的逆解。
机器人运动学逆解的传统方法主要有几何法[1]、解析法[2]、迭代法[3]等,但此类方法大多通用性差、运算速度慢或求解精度低。
神经网络具有非线性特征,能够很好地逼近任意复杂的非线性系统,能够处理多输入多输出系统,非常适合于此类问题的求解。
第10期2017年10月组合机床与自动化加工技术Modular Machine Tool & Automatic Manufacturing TechnitjueNo. 10Oct. 2017文章编号:1001 -2265 (2017) 10 -0034-0-D 01:10. 13462/j . cnki . m m tam t . 2017. 10.008基于并行R B F 神经网络的机器人逆运动求解!熊超%张鹏超d ,冯博琳%贺洋洋a ,杜枭)a(陕西理工大学a .机械工程学院;d .陕西省工业自动化重点实验室,陕西汉中723001)摘要:机器人逆运动求解的传统方法因为需要大量公式推导往往繁琐复杂,新出现的基于神经网络 的算法又存在一定的局限和不足,所以,文章在分析现有神经网络模型的基础上致力于找到一种简 单快速的求解方法。
考虑到R BF 神经网络在非线性函数逼近中的优秀表现,文章将两个相同结构的R BF 神经网络应用于机器人逆运动求解中。
以NACHI -M Z 04型机器人为例,首先建立其运动学模 型并在此基础上得到用以训练和测试神经网络的数据,然后基于Matlad nntool 搭建网络模型并分别对网络进行训练和测试,最后得到满足精度要求的网络模型。
结果表明,该方法在逆运动求解问题 中应用效果良好,具有一定的推广价值。
关键词:逆运动学;M Z 04机器人;并行神经网络 中图分类号:TH 165 ;TG 659文献标识码:ASolution to Inverse Kinematics of Robot Based on Parallel RBF Neural NetworksXIONG Cha 〇a, ZHANG Peng -chao d, FENG Bo -lin a, HE Yang -yang a, DU Xiao -xionga (a . School of Mechanical Engineering ; d . Key Laboratory of Industrial Automation of Shaanxi Province ,Shaanxi University of Technology , Hanzhong Shaanxi 723001, China )Abstract : The traditional solutions to the inverse kinematics of tlie robot is ver ^ complicated because of tlie need of a large number offormula derivation . And , thenewneural network-based algorithmsalwasome limitations and shortcomings , therefore , in this paper , it devotes to find a simple and fast metliod of sol ving inverse kinematics based on the analysis of tlie existing neural network models . So , considering the out standing performance of RBF neural network in nonlinea function approximation , this paper puts out a par allel neural networksmodal whichhavetwo RBF neural network withthe same structure . MZ 04 robot as an example ,modelingofkinematicsatfirst,itmanipulatesand testing the neural networks , then based on neural network toolbox , it builds th ie network model whidi it trains and tests after setting it up , and finaiy it meets the precision requiement of network model . It shows that the method applied to the solution of the inverse kinematics has good application results and is worh u sing widely .Key words : inverse kinematics ; MZ 04 robot ;parallel neural networks0引言机器人逆运动求解作为机器人离线编程、轨迹规 划、控制算法设计等其它课题研究的基础,一直是机器 人学中的一个经典问题,同样也是研究热点[1_3]。
机器人逆运动学的微分进化与粒子群优化BP神经网络求解陈桂;陈耀忠;林健;温秀兰【摘要】针对采用传统反向传播( BP)神经网络算法进行逆运动学求解收敛速度慢的问题,提出将微分进化( DE)与粒子群优化( PSO)算法相结合,对用于机器人逆运动学求解的BP神经网络进行优化。
基于机器人正解映射建立优化算法的目标函数,在PSO过程中,引入DE操作优化粒子进化方向,并将此混合算法用于BP 神经网络权值与阈值的优化。
对KUKA机器人进行仿真实验,结果表明:采用该文方法对机器人逆运动学问题的求解精度高,求得的关节角度误差小于0.1°;逆运动学求解结果所对应位姿矩阵的位置误差在0.1 mm数量级,具有较好的泛化能力。
该文方法满足机器人位置和姿态方面的精度要求。
%Aiming at the problem of slow convergence speed of traditional back propagation ( BP ) neural network algorithms, differential evolution ( DE ) and particle swarm optimization ( PSO ) are combined to optimize BP neural network for robot inverse kinematics. An objective function of the op-timization algorithm is formulated based on the mapping of robot forward kinematics. DE operation is employed to optimize particle evolution direction in PSO,and the weights and thresholds of the BP neural network are optimized.A simulation experiment is proposed for a KUKA robot,and the result shows that:the solution accuracy of robot inverse kinematics of the algorithm proposed here is high, and the joint angle error is below 0 .1 °;the position error between the initial pose matrix of the robot and that solved by the algorithm proposed here is of the order of magnitude of 0. 1mm,and has good generalization ability. The algorithm proposed here satisfies the accuracy requirements of robot locations and postures.【期刊名称】《南京理工大学学报(自然科学版)》【年(卷),期】2014(000)006【总页数】6页(P763-768)【关键词】微分进化;粒子群优化;反向传播神经网络;机器人;逆运动学;收敛速度;权值;阈值;关节角度误差;位置误差【作者】陈桂;陈耀忠;林健;温秀兰【作者单位】南京工程学院自动化学院,江苏南京211167;北方信息控制集团有限公司,江苏南京211153;南京工程学院自动化学院,江苏南京211167;南京工程学院自动化学院,江苏南京211167【正文语种】中文【中图分类】TP242机器人逆运动学求解,就是已知机器人操作空间的位姿,求出各关节变量。
基于LM算法的BP神经网络在NAO模型运动学求逆解中的
应用
预览说明:预览图片所展示的格式为文档的源格式展示,下载源文件没有水印,内容可编辑和复制
基于LM算法的BP神经网络在NAO模型运动学求逆解中的应用摘要:提出一种基于BP神经网络改进算法的NAO机器人逆运动学求解方法。
在讨论NAO模型逆运动学的求解问题以及BP神经网络基本原理的基础上,将LM训练方法运用到BP神经网络中。
实验结果表明该方法具有可行性和有效性。
关键词:逆运动学; NAO; RoboCup; BP神经网络; LM算法
0引言
机器人逆运动学问题就是已知位姿求解关节角变量。
在RoboCup 仿真3D比赛中,逆运动学求解占有重要地位,它直接关系到机器人的动作生成、步态规划以及高层决策。
传统的解析法和数值法需要大量计算,这很难满足实时性要求,而神经网络可以很好解决这个问题。
BP神经网络是目前应用最为广泛和成功的神经网络之一。
它是一种多层前馈型网络,可以实现从输入到输出的任意非线性映射,权值的调节采用反向传播算法,简称BP算法。
然而BP算法的主要缺点是:收敛速度慢,局部极值、难以确定隐层节点的个数。
BP算法的改进可采用有效的优化算法。
其中LM 算法是高斯——牛顿法的改进形式,既具有高斯——牛顿法的全局特性又具有梯度法的局部特性。
实验表明该方法在NAO模型求逆解中具有可行性。
1基本概念
1.1NAO简介。
神经网络在机器人逆运动学中的应用姜志兵,赵英凯,李方方(南京工业大学,江苏南京210009)Neural Network Applying to Inverse Kinematics in RoboticsJIANG Zhi bing ,ZHAO Yingkai ,LI F ang fang(Nanjing University of Technology ,Nanjing 210009,China ) 摘要:研究了3种BP 网络改进算法在机器人逆运动学中的应用.采用多层前向神经网络建立机械手逆运动学模型.仿真结果表明,所提方法可以满足机械手逆运动学解的精度,确保快速达到全局收敛.关键词:神经网络;机器人;逆运动学;改进算法中图分类号:TP393.02文献标识码:A文章编号:10012257(2005)11004303收稿日期:20050713Abstract :This paper st udies t hree kinds of im 2proved BP algorit hm on inverse kinematics in ro 2botics.The multilayer forward neural networks are used to establish t he inverse kinematics models for robot manip ulator.Simulations show t hat t he p ro 2posed met hod can satisfy t he inverse kinematics so 2lutio ns for ro bot manip ulator and guarantees a rap 2id global convergence.K ey w ords :neural network ;robot ;inverse ki 2nematics ;improved algorit hm0 引言机械手运动学是研究机器人机械臂的运动及其控制特性,其运动学逆解是机器人控制的关键环节之一[1].运动学逆解在机器人运动分析、运动仿真、离线编程和轨迹规划中占有重要地位,在机器人控制中,只有使各关节移动(或转动)逆解中的值,才能使末端执行器达到工作所要求的位置和姿态.传统机械手逆运动学求解的方法包括Paul 等人提出的反变换法,Lee 和Ziegler 提出的几何法和迭代法等.反变化法是一种不能保证具有封闭形式解的逆运动学算法;几何法也有一定的限制,即一类机械手的封闭形式解不能用于其它不同几何形状的机械手;迭代法依赖于起始点,可收敛于单一解.用神经网络方法求解机械手运动学逆解即属于迭代法.但神经网络方法与传统迭代法又有所不同,即所需计算与机械手的自由度无关,而是依赖于网络的结构[2].在此采用了改进的B P 网络算法来求解机器人运动学逆解.1 逆运动学问题逆运动学问题是机械手控制研究中最重要的问题之一.通常,人们要求机械手去完成某一动作,习惯上总是以笛卡尔坐标空间中的状态向量(如平面坐标系中的位移、速度等)来描述.而对机械手的操纵则是通过调节机械臂各个关节的角度来实现的.为了控制机械手的运动,在已知机械手的运动轨迹条件下,求解对应的机械臂关节间的角度问题,称为“逆运动学问题".通常考虑具有n 个自由度的机械手,在任一时刻t ,关节状态向量θ(t )=[θ1(t ),θ2(t ),∗,θn (t )]T∈R n 与机械手的位置状态向量x (t )=[x 1(t ),x 2(t ),∗,x m (t )]T ∈R m 间的关系由如下机械手运动学方程描述.x (t )=f [θ(t )](1)常用的逆解策略是建立机械手关节状态向量的微分运动关系,从而求解某机械手的运动向量所必须的关节速度.对式(1)的两边求导得:x (t )=J [θ(t )]θ(t )(2)式中 x (t )=d x (t )/d t ,θ(t )=d θ(t )/d t ,J (θ)=5f /5θ∈R m ×n 为一(m ×n )矩阵,它是机械手运动学方程雅可比矩阵.在给定x (t )的情况下,相应关节状态向量的速度为:θ(t )=J +[θ(t )]x (t )(3)式中J +(θ)=J T (θ)[J (θ)J T (θ)]-1∈R n ×m 为雅可比矩阵的Moore Penrose 伪逆.式(3)给出的解常称为关节速度的伪逆解[3].用上述方法求解雅可比矩阵及其伪逆解,计算比较复杂,求解比较困难.2 多层前馈神经网络及其改进算法2.1 BP 网络的拓扑结构BP 网络是一单向传播的多层前向网络,多层前向神经网络是一个强有力的学习系统,一个三层前向网络可以逼近任意大非线性函数[4].用三层前向神经网络来建立机械手逆运动学模型,网络结构如图1所示.图1 三层前向神经网络结构2.2 BP 算法的改进尽管在理论上,基于BP 算法的多层前馈网络可以以任意精度逼近任何非线性函数,但是因为误差曲面存在平坦区域,存在多个极小值点,使标准的B P 算法暴露出不少内在缺陷:易形成局部极小而得不到全局最优;训练次数多,使得学习效率低,收敛速度慢;隐层节点的选取缺乏理论指导;训练学习新样本有遗忘旧样本的趋势[5].因此实际应用时,大多使用BP 的改进算法,常用的B P 改进算法有以下一些方法.2.2.1 带动量的批处理梯度下降算法带动量的批处理梯度下降的思想是每一次输入样本对网络并不立即产生作用,而是等到全部输入样本到齐,将全部误差求和累加,再集中修改权值一次,即根据总误差E =∑kEk修正权值,以提高收敛速度.在权值调整时加入动量项,当误差曲面出现骤然起伏时,可以减小振荡,提高训练速度,可以有效抑制网络限于局部极小,此时权值调整向量表达式为:ΔW (t )=ηδX +αΔW (t -1)式中 α动量系数 η学习率此法所加入的动量项实质上相当于阻尼项,它减小了学习过程度振荡趋势,改善了收敛性.2.2.2 自适应调整学习率梯度下降法标准BP 算法收敛速度慢,一个重要原因是学习率选择不当.如果学习率选得太小,则收敛太慢;如果学习率选得太大,则可能修正过头,导致震荡甚至发散.因此出现了自适应调整学习率的改进算法,自适应调整学习率有利于缩短学习时间.B P 算法的学习率是凭经验给出的一个固定常数,η一般取0~1之间的数.由于η是固定的,在靠近极小点的时候,容易产生来回摆动的现象,造成算法难以收敛到极小解[6].通常调整学习率的准则是:检查权重的修正值是否真正降低了误差函数,如果确实如此,则说明所取的学习速率值小了,可以对其增加一个量;若相反,则产生了过调,应减小学习速率的值.具体调整公式为:η(i +1)=1.05η(i )if E (i +1)<E (i )0.7η(i )if E (i +1)>1.04E (i )ηot herwise 2.2.3 最优化方法的B P 算法在最优化理论中,Levenberg Marquandt 算法是一种非常有效的优化设计方法.本文利用Leven 2berg Marquandt 最优化方法对单隐层B P 网络进行优化.单隐层BP 网络的输出是输出层的输入;每一层都有不同数目的神经元和不同的转移函数.L MBP 算法的权值调整方法为:Δω=(J T J +m I )-1J T E 式中 J 误差对权值微分的J acobian 矩阵 E 误差向量 m 一个标量(依赖于m 的幅值)该方法光滑地在2种极端情况之间变化:即牛顿法(当m →0时)和最速下降法(当m →∞时).从收敛速度和收敛性来看,它是牛顿法和最速下降法的一种折中算法.3 计算机仿真为验证所提方法在机械手逆运动学求解中的应用有效性,并对几种改进算法的效果进行比较,进行了仿真实验.采用二杆平面机械手模型进行仿真实验,虽然二杆平面机械手模型比较简单,但是不失一般性,这种方法同样适用于更多自由度的机械手当中.二杆平面机械手模型如图2所示,机械手前向图2 二杆平面机械手模型运动学方程为:x =l 1co s θ1+l 2cos (θ1+θ2)y =l 1sin θ1+l 2cos (θ1+θ2)式中 x ,y机械手终端位置 l 1,l 22杆的长度 θ1,θ2机械手连杆转角采用三层前向神经网络建立平面二杆机械手逆运动学模型.输入层的2个节点分别接收机械手的位置x ,y ,隐层取10个节点,其节点的激发函数为对数Sigmoid 函数;输出层有2个节点,其输出为在[-π,π]连续取值的机械手连杆转角,其节点激发函数为正切Sigmoid 函数.4 仿真结果分析选取一组数据并结合上述几种方法对此神经网络进行训练.网络训练完成后,输入检测样本,检测网络的识别能力.利用训练过程误差曲线分析3种改进BP 算法的训练结果.3种算法的误差曲线分别如图3,图4,图5所示.带动量的批处理梯度下降算法训练的速度较慢,训练5000次也没达到最终的训练目标,自适应调整学习率梯度下降法的训练速度,比带动量的批处理梯度下降算法训练速度快,但在1000次之后收敛较慢.L MB P 算法的收敛速度是最快的,训练不到30次就已经达到训练目标.2个角度基于L MBP 算法的仿真结果及与期望结果的对比如图6所示.θ1与θ2的均方差分别为4.9224e004与5.1178e004.从仿真结果可以看出此方法能够满足求解精度.图3 带动量的批处理梯度下降算法训练误差曲线图4 自适应调整学习率梯度下降法训练误差曲线图5 L MBP 算法训练误差曲线 图6 二杆平面机械手转角θ1,θ2的期望输出与仿真输出曲线5 结束语从网络的仿真结果可以看出,BP 网络的改进算法可以很好地应用在机器人逆运动学问题当中,尤其是改进算法中的L MB P 算法,该方法性能稳定,既有较快的速度,又具有很高的求解精度,只要计算机内存足够,适用于实时性要求高的场合.参考文献:[1] 谭 营,何振亚.一种机器人逆运动学求解的神经网络方法[J ].电子科技大学学报,1998,27(3):310-315.[2] Ttjomurtula S ,Kak S.Inverse kinematics in robotics u 2sing neural networks [J ].Information Science ,1999(116):147-164.[3] 杨国军,崔平远.一种神经网络方法在机械手控制中的应用[J ].电机与控制学报,2000,4(3):179-182.[4] 陈 平,槐春晶,罗 晶.改进的BP 算法用于控制图模式识别[J ].机械与电子,2005,(3):42-44.[5] 李慧勇,张竺英.水下机械手运动学逆解的一种优化解法[J ].机床与液压,2003,(1):111-114.[6] 范 磊,张运陶,程正军.基于Matlab 的改进BP 神经网络及其应用[J ].西华师范大学学报,2005,26(1):70-73.作者简介:姜志兵 (1982-),男,江苏如皋人,南京工业大学硕士研究生,研究方向为机器人控制;赵英凯 (1943-),男,江苏镇江人,南京工业大学教授,博士研究生导师,研究方向为机器人控制、智能控制.基于V P 技术的并联机器人工作空间求解赵 星,刘子建,王 辉(湖南大学,湖南长沙410082)Workspace Determination for Parallel Manip ulator Based on V P TechnologyZHAO Xing ,L IU Zi jian ,WANG H ui (Hunan University ,Changsha 410082,China ) 摘要:提出了基于虚拟样机的并联机器人工作空间的求解方法,分析了其实现过程.运用所提的方法,得出了3RPS 并联机器人的工作空间求解结果.关键词:并联机器人;工作空间;3RPS ;V P 中图分类号:TP391.9文献标识码:A文章编号:10012257(2005)11004604收稿日期:20050714Abstract :In t his paper ,based on virt ual proto 2type of workspace determination for parallel ma 2nip ulator ,a new met hod is p ut forward and ana 2lysed.By adopting t he present met hod ,t he work 2space of 3RPS parallel manip ulator is obtained.K ey w ords :parallel manip ulator ;workspace ;3RPS ;V P1 并联机器人工作空间概述并联机器人的工作空间是机器人末端执行器的工作区域,是衡量并联机器人性能的重要指标[1].它是一个三维的空间区域,有一定的体积和形状,一般认为体积越大,机器人执行器的工作范围就越大.。
基于三个并行BP神经网络的机器人逆运动学求解臧庆凯;李春贵;钟宛余【摘要】针对传统的求逆运动学方法相当复杂,一般的神经网络收敛速度慢,精度不高的缺陷,提出一种由3个并行的BP (Back Propagation)神经网络组成的系统来解决运动学逆问题,输人数据分别通过3个并行的BP神经网络,再对输出分别求正运动学解,然后计算误差,最后选择误差最小的作为系统的输出,仿真表明,该方法可以有效地解决运动学逆问题,使用3个并行的BP神经网络可以使整个系统的误差更小,BP神经网络使用Levenberg-Marquardt训练方法,可以使学习收敛速度更快.%Many traditional solutions are usually complex and general neural networks have slow convergence velocity and low precision, for the solution of this problem a neural network for inverse kinematics solution approach has been presented in this paper. The structure of the proposed method is based on using three parallel BP (Back Propagation) neural networks. Input data goes through the three parallel BP neural networks separately. At the end of parallel implementation, the results of each network are evaluated by using direct kinematics e-quations to obtain the network with best result. Simulations show that inverse kinematics problem can be solved effectively. Using three parallel networks can minimize the error of the whole system. BP neural networks use Levenberg?Marquardt training algorithm which is a fast -learning algorithm.【期刊名称】《计算机测量与控制》【年(卷),期】2012(020)008【总页数】4页(P2244-2247)【关键词】机器人;逆运动学;神经网络;LM算法【作者】臧庆凯;李春贵;钟宛余【作者单位】广西工学院,广西柳州545006;重型车辆零部件先进设计制造教育部工程研究中心,广西柳州545006;广西工学院,广西柳州545006;重型车辆零部件先进设计制造教育部工程研究中心,广西柳州545006;广西工学院,广西柳州545006;重型车辆零部件先进设计制造教育部工程研究中心,广西柳州545006【正文语种】中文【中图分类】TP240 引言机器人的运动学包括正运动学和逆运动学两个方面[1]。