k
Kpe(k)Ki e(j)Kde(k)e(k1) j0
式中,u(k)为第k次采样时刻的控制器的输出值; e (k-1)和e (k)分别为第(k-1)次和第k次采样时刻的偏差值。
只要采样周期T足够小,数字PID控制与模拟PID控制就会十分
精确的接近。
ppt精选版
12
1.2.2 增量式PID控制算法
e(k )
0 e(k )
e(k) e0 e(k) e0
式中,e(k)为位置跟踪偏差,e0是一个可调参数,其 具体数值可根据实际控制对象由实验确定。若e0值 太小,会使控制动作过于频繁,达不到稳定被控对象
的目的;若e0太大,则系统将产生较大的滞后。
ppt精选版
35
1.2.9 带死区的PID控制算法
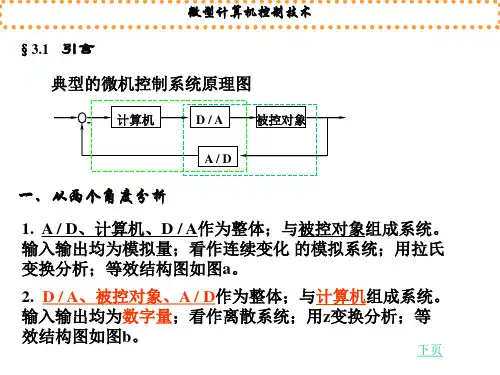
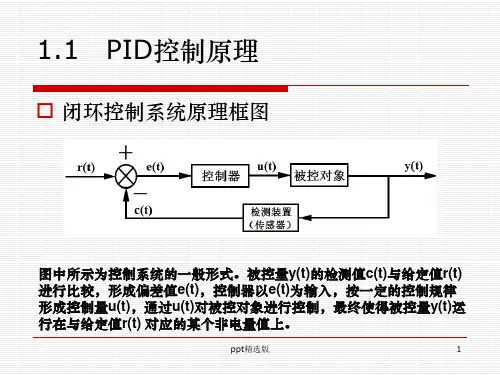
1.1 PID控制原理
闭环控制系统原理框图
图中所示为控制系统的一般形式。被控量y(t)的检测值c(t)与给定值r(t) 进行比较,形成偏差值e(t),控制器以e(t)为输入,按一定的控制规律 形成控制量u(t),通过u(t)对被控对象进行控制,最终使得被控量y(t)运 行在与给定值r(t) 对应的某个非电量值上。
ppt精选版
1
1.1 PID控制原理
模拟PID控制系统原理框图
ppt精选版
2
ppt精选版
3
1.1 PID控制原理
PID控制器各环节的作用如下:
(1)比例环节的数学式表示是:
Kp e(t)
在模拟PID控制器中,比例环节的作用是对偏差量e(t)瞬间 作出反应, 产生相应的控制量u(t),使减少偏差e(t)向减小的 方向变化。控制作用的强弱取决于比例系数Kp, Kp越大, 控制作用越强,则过渡过程越快,控制过程的静态偏差ess 也就越小,但是Kp越大,也越容易产生振荡,增加系统的超 调量,系统的稳定性会变差。


![PID控制原理和形式[PPT课件]](https://uimg.taocdn.com/5b9e0fa40129bd64783e0912a216147917117e03.webp)