自动控制元件及线路-编码器与光栅-哈工大-伊国兴
- 格式:pdf
- 大小:3.81 MB
- 文档页数:64
人文与社会科学学院030204中共党史(含:党的学说与党的建设)复试由笔试和面试两部分组成,外国语听力考试在面试中进行。
复试的总成绩为280分,其中笔试200分,面试80分。
(1)中国古代史,占40分。
(2)中国现代史,占60分。
(3)国际共产主义运动史,占50分。
(4)马克思主义理论,占50分。
人文与社会科学学院030301社会学(1)社区概论黎熙元主编,《现代社区概论》,中山大学出版社,2003。
(2)发展社会学张琢、马福云著:《发展社会学》,中国社会科学出版社,2001。
(3)经济社会学周长城:《经济社会学》,中国人民大学出版社,2003复试由笔试和面试两部分组成,外国语听力考试在面试中进行。
复试的总成绩为280分,其中笔试200分,面试80(1)社区概论,占68分。
(2)发展社会学,占66分。
(3)经济社会学,占66分人文与社会科学学院0305马克思主义理论(1)辩证唯物主义原理《辩证唯物主义原理》或《马克思主义哲学》的辩证唯物主义部分均可(2)历史唯物主义原理《历史唯物主义原理》或《马克思主义哲学》的历史唯物主义部分均可。
复试由笔试和面试两部分组成,外国语听力考试在面试中进行。
复试的总成绩为280分,其中笔试200分,面试80分。
(1)辩证唯物主义原理,占60分。
(2)历史唯物主义原理,占40分。
(3)思想政治教育学原理,占50分。
(4)思想政治教育方法论,占50分人文与社会科学学院060107 中国近现代史复试由笔试和面试两部分组成,外国语听力考试在面试中进行。
复试的总成绩为280分,其中笔试200分,面试80分(1)中国近现代史,占100分。
(2)中国古代史,占40分。
(3)世界史,占60分。
外国语学院050201英语语言文学胡壮麟,姜望琪《语言学教程》,北京大学出版社复试总成绩为280分,其中笔试占200分,面试为80分1)基础英语(100分)2)语言学(40分)3)英美文学(40。


小范围回转轴系感应同步器测角系统的误差分离技术
任顺清;伊国兴;曾庆双;王常虹
【期刊名称】《电机与控制学报》
【年(卷),期】2005(009)002
【摘要】利用391齿盘、平面反射镜及自准直仪测量了某一小范围(50°)回转轴系的圆感应同步器测角系统的角位置误差,利用测角系统的误差特性,建立了回归误差模型,并通过最小二乘法得出了圆感应同步器一个节距内的一次谐波和二次谐波误差,根据误差的幅值和相位,采用硬件补偿技术,使圆感应同步器测角系统的误差大大降低.
【总页数】4页(P183-186)
【作者】任顺清;伊国兴;曾庆双;王常虹
【作者单位】哈尔滨工业大学,空间控制与惯性技术研究中心,黑龙江,哈尔
滨,150001;哈尔滨工业大学,空间控制与惯性技术研究中心,黑龙江,哈尔滨,150001;哈尔滨工业大学,空间控制与惯性技术研究中心,黑龙江,哈尔滨,150001;哈尔滨工业大学,空间控制与惯性技术研究中心,黑龙江,哈尔滨,150001
【正文语种】中文
【中图分类】TM383
【相关文献】
1.基于RDC的感应同步器测角系统设计与实现 [J], 刘丽艳;张新磊;寇淑辉;唐声权
2.感应同步器测角系统误差分析及补偿 [J], 娄莉娜;朱革;王先全;武亮
3.基于AD2S80A和AVR的圆感应同步器测角系统 [J], 邱子峰;李文华;许斌鹏
4.基于FPGA的绝对式圆感应同步器测角系统的设计与实现 [J], 王飞;付晶;韩昌佩
5.感应同步器测角系统的电路设计与软件补偿 [J], 潘文贵;付晶;朱钰;韩昌佩
因版权原因,仅展示原文概要,查看原文内容请购买。

控制科学与工程复试指导按照教育部关于加强硕士研究生招生复试工作的指导意见及学校有关要求,控制科学与工程学科2012-2014年硕士研究生招生复试指导确定如下。
一、复试比例及主要内容1、复试由笔试和面试两部分组成,外国语听力考试在面试中进行。
复试的总成绩为280分,其中笔试200分,面试80分。
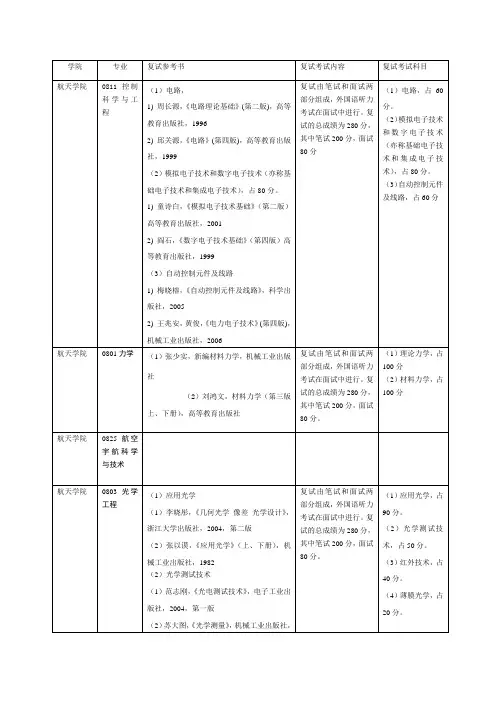
2、复试笔试科目(1)电路,占40分。
主要内容:直流电路、交流电路、动态电路、非线性电路、传输线。
参考书目:1) 陈希有,《电路理论基础》(第三版),高等教育出版社,20062) 邱关源,《电路》(第五版),高等教育出版社,2006(2)模拟电子技术和数字电子技术(亦称基础电子技术和集成电子技术),占80分。
主要内容:包括模拟电子技术和数字电子技术。
参考书目:1) 童诗白,《模拟电子技术基础》(第四版)高等教育出版社,20062) 阎石,《数字电子技术基础》(第五版)高等教育出版社,2006(3)自动控制元件及线路,占40分。
主要内容:各类执行元件、测量元件、放大元件。
参考书目:1) 梅晓榕,《自动控制元件及线路》(第四版),科学出版社,20072) 王兆安,黄俊,《电力电子技术》(第五版),机械工业出版社,2009(4)控制系统设计,占40分。
主要内容:控制系统设计的基本要求、控制系统设计中的约束、伺服系统设计、调节系统设计。
参考书目:1) 王广雄,《控制系统设计》(第一版),清华大学出版社,20083、面试主要内容1)从事科研工作的基础与能力;2)综合分析与语言表达能力;3)外语听力及口语;4)大学学习情况及学习成绩;5)专业课以外其他知识技能的掌握情况;6)特长与兴趣;7)身心健康状况。
【关键字】系统Harbin Institute of Technology课程设计论文课程名称:自动控制元件及线路设计题目:捡乒乓球机器人小车的设计院系:航天学院控制科学与工程系班级:1304105班设计者:杨明阳01徐云飞02姚晨蔚16指导教师:马广程设计时间:2016年3-5月捡乒乓球机器人小车摘要:随着科学技术的日益发展,越来越多的科技被应用在了生活的方方面面。
当然也包括运动赛场上,帮助选手以及裁判解决一部分的麻烦,使得比赛进行的更加流畅。
这里为解决乒乓球比赛上乒乓球的捡取问题,设计了一种以单片机作为主控制器的自动捡球机器人。
该捡球机器人采用风扇产生的吸力来实现捡球;利用超声波传感器实现对乒乓球的自动识别;通过红外传感器监测周围环境,实现自动躲障。
本系统会在裁判对每一个球做出判决后开始工作,先按照预定路线绕场地前进,同时在行进过程中利用传感器寻找掉落的小球。
当找到目标并确认后,改变预定路线转而向目标前进,最终捡起乒乓球,之后再回到原点。
完成捡球功能,保证比赛的连续性。
关键词:捡乒乓球机器人超声波传感器红外传感器过程控制目录1.功能设计----------------------------------------------------------42.系统的性能指标和技术要求------------------------------------------43.背景及意义--------------------------------------------------------44.系统的总体结构与设计方案------------------------------------------54.1 预定路线前进---------------------------------------------------64.2 目标寻找-------------------------------------------------------74.3 捡起目标乒乓球-------------------------------------------------94.4 判断乒乓球是否捡起---------------------------------------------94.5 绕开障碍-------------------------------------------------------94.6 返回原点------------------------------------------------------105.执行元件---------------------------------------------------------105.1 行进电机的选择------------------------------------------------105.1.1 直流伺服电机结构-------------------------------------------105.1.2 直流伺服电机驱动原理---------------------------------------115.1.3 直流伺服电机的分类及特点-----------------------------------115.1.4 指标的计算和直流伺服电机的选择-----------------------------125.1.5 直流伺服电机调速-------------------------------------------15直流伺服电机调速原理------------------------------------15直流速度控制方式----------------------------------------155.2 捡球装置的选择------------------------------------------------225.2.1 捡球原理级实现---------------------------------------------235.2.2 吸球管设计-------------------------------------------------246.测量元件---------------------------------------------------------266.1 测速传感器的选取----------------------------------------------266.1.1 三种传感器的对比分析---------------------------------------266.1.2 对光电编码器的论证分析和选取-------------------------------286.2 位置和躲障传感器的选取----------------------------------------346.2.1 常用传感器及特点-------------------------------------------346.2.2 根据超声传感器实现定位和物体识别---------------------------366.2.3 根据红外感器实现障碍躲躲-----------------------------------416.3 根据红外传感器实现捡球信号的反馈------------------------------446.4 传感器设计中的缺陷及可改进的地方------------------------------456.4.1 传感器设计中的缺陷-----------------------------------------456.4.2 传感器设计中可改进的部分-----------------------------------457.单片机-----------------------------------------------------------467.1 常用单片机----------------------------------------------------467.2 单片机选型----------------------------------------------------477.3 所选单片机特点及可行性----------------------------------------478.系统硬件清单-----------------------------------------------------489.自评-------------------------------------------------------------48 9.1 优点----------------------------------------------------------489.2 缺点以及不足--------------------------------------------------4910.分工------------------------------------------------------------4911.心得体会--------------------------------------------------------50参考文献-----------------------------------------------------------50一、功能设计1.裁判做出判决后自行定位乒乓球掉落位置2.迅速移动至掉落乒乓球所在位置3.捡起乒乓球,并回到起点4.行进过程中躲避场地选手以及其他人员或障碍5.利用尺寸确认目标乒乓球二、系统的性能指标和技术要求1.机器人移动至乒乓球顶点位置精度±3cm2.机器人移动速度≤2 m/s3.紧急刹车时间≤0.3s4.总捡球时间≤21s5.判断乒乓球是否捡起6.能够辨认出乒乓球和障碍物三、背景及意义随着人们对机器人技术智能化本质认识的加深,机器人技术开始源源不断地向人类活动的各个领域渗透。

自动控制元件及线路-2 -电气控制常识目录1。
磁场基本理论-磁场基本物理量-电磁基础定律2。
电气控制常识-线路、线缆-低压电器3。
电控线路举例电磁元件是利用磁场做媒介来实现信息(或能量)传递(或转换)的装臵。
磁场产生: 由永久磁铁产生由电流产生磁场分类:按电流性质直流磁场交流磁场磁路:磁通所经过的闭合回路称为磁路。
通过主要路径的磁通称为主磁通,另外还有少量的磁通不在此路径通过,称为漏磁通。
常见的铁心磁路一、磁力线定义:磁力线(或称B 线)是人们用来描述磁场的一种手段,每条磁力线上的任一点的切线方向都和该点磁场的方向一致。
A B C D磁力线的两个基本特征:第一,在任何磁场中每一条磁力线都是环绕电流的无头无尾的闭合曲线,即没有起点也没有终点;第二,在任何磁场中,每一条闭合的磁力线的回转方向和该闭合磁力线所包围的电流方向符合右手螺旋法则。
(a )直线电流磁力线(b )圆电流磁力线I I(c )螺线管电流的磁力线I IN S(d )永久磁铁的磁力线二、磁感应强度B定义:是表示在空间某点磁场强弱和方向的物理量,是一个空间矢量。
通俗的说,磁感应强度为通过某单位面积的磁力线的条数。
所以磁感应强度也称为磁密。
磁感应强度的方向:为该点磁场的方向。
+BFV 磁感应强度的单位为T (特)三、磁通Φ定义:通过磁场中一个给定面A 的磁力线的条数,简称磁通。
通过面积A 的磁通量为:n dAθB Φ=⎰A Bcos θdA=∫A B ·d A在均匀的磁场中磁通量:Φ=B·A磁通单位:Wb(韦伯)四、磁场强度H定义:在任何介质磁场中,某一点的磁感应强度B和同一点上介质磁导率μ的比值,即:H=B/μ单位:H —安每米(A/m)或安每厘米(A/cm)1-1 磁路的基本物理量五、磁导率μ定义:用来表示物质导磁能力大小的物理量称为导磁系数或磁导率。
单位:亨每米(H/m)-7真空的磁导率为:μ0= 4π 10 (H/m)空气的磁导率: 近似等于真空磁导率。
H a r b i n I n s t i t u t e o f T e c h n o l o g y课程设计说明书课程名称:自控元件课程设计设计题目:一级旋转倒立摆系统院系:控制科学与工程-自动化班级:设计者:指导教师:赵辉伊国兴设计时间: 2015年5-6月哈尔滨工业大学一级旋转倒立摆系统摘要:对于倒立摆系统的研究长期以来被认为是控制理论及其应用领域里引起人们极大兴趣的问题。
倒立摆系统是一个典型的快速、多变量、非线性、不稳定系统。
研究倒立摆控制能有效地反应控制中的许多问题。
倒立摆研究具有重要的理论价值和应用价值。
理论上,它是检验各种新的控制理论和方法的有效实验装置。
应用上,倒立摆广泛应用于控制理论研究、航空航天控制、机器人、杂技顶杆表演等领域,在自动化领域中具有重要的价值。
本文主要介绍了我们小组研制的一级旋转式倒立摆系统,它是一个典型的机电一体化系统,采用内置STM-32运动控制器和直流电机进行实时运动控制。
关键词:倒立摆;;STM32;增量码盘;直流有刷电机一、引言 (1)二、作品简介 (3)三、一级旋转式倒立摆设计概述: (4)1.1 系统总体结构 (4)1.2 机械结构 (4)1.3 硬件部分 (5)1.4 模型建立 (5)1.5 模型仿真 (8)四、各元件选型及选择理由 (16)主控板选型 (16)电机选型 (18)测量元件选型 (19)五、成本预算 (21)六、设计小结 (22)七、应用前景 (22)八、参考资料 (22)九、(附)单片机PWM控制部分程序 (23)一、引言倒立摆控制系统是一个复杂的、不稳定的、非线性系统,是进行控制理论教学及开展各种控制实验的理想实验平台。
许多抽象的控制概念如系统稳定性、可控性、系统收敛速度和系统抗干扰能力等,都可以通过倒立摆直观的表现出来。
倒立摆是机器人技术、控制理论、计算机控制等多个领域、多种技术的有机结合,其被控系统本身又是一个绝对不稳定、高阶次、多变量、强耦合的非线性系统,可以作为一个典型的控制对象对其进行研究。
自动控制理论(哈尔滨工业大学)中国大学MOOC答案2022版第1章自动控制理论概述单元测验1、自动控制是指在没有人直接参与的情况下,通过()使被控制对象或过程自动地在一定的精度范围内按照预定的规律运行。
答案: 控制器2、信息在控制系统中占有重要的作用,控制系统对信息利用主要体现在()。
答案: 采集、处理、决策3、开环控制的特点不包括()。
答案: 不会不稳定4、对控制系统性能的三个基本要求不包括()。
答案: 抗干扰性5、时变系统是指系统中的物理参数()的系统。
答案: 随时间变化6、稳定性是系统正常工作的首要条件,稳定性的要求是()。
答案: 在扰动作用下重新回复到平衡状态的能力7、控制系统按照给定输入是否为恒定可分为()。
答案: 调节控制和伺服系统8、负反馈是利用输入和反馈量相减所得的()去作用于被控对象,达到减小偏差或消除偏差的目的。
答案: 偏差量9、自动控制系统组成最基本的两部分是()和()。
答案: 控制对象;控制器10、关于反馈的概念说法正确的是()。
答案: 将输出量引入输入端比较,结果重新作用于输入。
;因为反馈的存在系统形成了闭环结构。
;反馈控制可以提高系统的精度和抗扰性。
11、随动系统主要强调的是抗扰性,调节系统主要强调的是跟随性。
答案: 错误12、非线性系统是指其中所包括的全部元件都具有非线性特性。
答案: 错误13、控制系统稳、快、准三方面基本的性能中,每个可以独立调整,相互之间没有影响。
答案: 错误14、闭环系统的不稳定主要是因为系统存在扰动。
答案: 错误15、时变系统是指系统中的物理参数()的系统。
答案: 随时间变化第2章线性系统的数学模型线性系统的数学模型单元测试1、理想化的物理系统是()。
答案: 忽略了次要因素的,可以用物理定律进行描述的系统2、描述系统时域的输入输出特性的模型是答案: 微分方程3、描述系统数学模型的微分方程的系数由()决定。
答案: 系统中各元件的物理参数4、同一个闭环系统中设定的输入输出变量不同,则()。