最新AB变频器在行车上的应用改造方案
- 格式:ppt
- 大小:2.03 MB
- 文档页数:22
罗克韦尔AB(PowerFlex400系列)变频器常用参数:一:与参数相关的功能键:上电时,最后一次用户选择的显示组参数编号短暂地闪烁显示,然后显示成该参数的当前值。
按一次ESC键将显示上电时的显示组参数编号,再次按ESC键进入参数编辑组菜单,组菜单字母将会闪烁,此时SeL键可以用于左右位移,上下键用于改变参数值或参数组编号。
回车键可确认并保存更改的参数值,参数保存后连续按两次ESC键退出参数编辑画面。
参数菜单共有7类分别为:b基本显示组(只读)、P基本编程组、t控制端子编程组、C通迅组、A高级编程组、R辅助继电器编程组、d高级显示组。
二:控制回路端子功能:R1-R2-R3:1#继电器R4-R5-R6:2#继电器01-04:停止/功能丢失02-04:起动/正转03-04:方向/反转05~08-04:多功能输入1~411:SRC灌电流模式时+24v电源端12-13-14电位器模拟(1~10k)13-14模拟量输入1(Al1)15/16-14:模拟量输岀1(Ao1)/2(Ao2)17-18:模拟量输入2(Al2)19-10:光耦合输岀(19接正极)注:电路板上的四个拔动开关AO1、AO2、Al1和Al2分别对应模拟量输出1、2和模拟量输入1、2是选用电压模式还是电流模式。
三:常用参数:b基本显示组(只读):*1*b001/002:输出/命令频率*2*b003/004:输出电流/电压*3*b007:最近一次故障代码P基本编程组:*1*P033:电机过载电流设定*2*P034/035:频率下/上限*3*P036/C108:第一/第二运转命令来源。
《0:面板控制;1:三线制;2/3/4/6:二线制普通级/灵敏级/高速级/使能级;5:通迅控制。
(注:当P036设为以上1、2或4时,只有上升沿脉冲才能触发,而设为3或6时为开关型连续扫描触发。
)》*4*P037:停车方式:《0/1/2/3:斜坡/自由惯性/直流制动/自动直流制动,同时“停止”命令均可复位激活的故障;4/5/6/7:斜坡/惯性/直流制动/自动直流制动》*5*P038/C109:第一/第二频率命令来源:《0:键盘;1:由参数A142设定(由多功能输入端子外接按钮作加或减频率时P038必须设为1,也叫MOP功能。
PLC与变频器技术在行车中的应用摘要:可编程序控制器(PLC)是一种工业控制计算机,在现代工业过程控制中得到了广泛应用。
行车作为起重设备,在大多数生产企业中使用广泛,但传统的继电器控制系统和串级调速方式存在故障率高、调速精度差、重载起吊容易出现溜钩等问题,可靠性得不到保证。
本方案利用了西门子公司的S7-300 型PLC结合ABB公司ACS800变频器对15+5吨行车进行了改造,获得良好的技术性能和经济性能。
论文主体一引言:西门子公司的S7-300 型PLC,从功能上看可以执行逻辑运算、顺序控制、定时、计数和算术运算等操作的指令,并通过数字式、模拟式的输入和输出,控制各种机械或生产过程。
体现出了良好的灵活性和通用性,具有抗干扰能力强、可靠性高,编程语言简单易学,与外部设备连接简单,使用方便,控制系统的设计、调试周期短等特点。
ABB公司的ACS800系列变频器是基于直接转矩控制的新一代交流调速设备,具有零速状态下的100%额定转矩输出能力,同时利用其自带的宏控制,可以在重载起重时避免溜钩现象的出现。
在吊钩下降过程中利用能耗制动回路的吸收可以避免因反电势过高对电机绕组的损坏。
利用该项技术对行车设备进行自动化改造,有着重要意义。
关键词:PLC 变频器行车控制改造备注;正转/反转选择,0=正转、1=反转。
加速/减速时间选择,0选择斜坡时间0,1选择斜坡时间1。
1 升降主电路升降主电路由三相交流电输入、主钩驱动变频器(ACS800-75KW)、副钩驱动变频器(ACS800-45KW)、吊钩电机、能耗制动单元等组成。
由于采用交---直---交变频器。
在负载自身重力下,制动时回路的能量不能送回电网,为限制泵升电压和负载下降时反电势的升高采用能耗制动单元。
2 大、小车主电路大、小车主电路由大车驱动变频器(ACS800-45KW)、小车驱动变频器、大车行走电机、小车行走电机、能耗制动单元等组成。
3 PLC控制电路选用西门子公司的S7-300 型PLC。
淮北市热电有限公司#1、#2行车变频改造方案编制:史拥军2013年3月8日淮北市热电有限公司#1行车变频器与PLC控制改造方案1 引言我公司#1行车是5T桥式抓斗行车,由操作台、运行机构和桥架组成的。
运行机构是由三个基本独立的拖动系统组成:1、大车拖动系统。
拖动整台桥式抓斗顺着车间做“横向”运动(以操作者的坐向为准),大车的行走由2 台11kW绕线电机牵引。
2、小车拖动系统。
拖动抓斗顺着桥架作“纵向”运动。
小车的行走由1台3.7kW的绕线电机牵引。
3、抓斗吊拖动系统。
拖动抓斗作吊起、放下的上下运动及抓斗的放开、闭合运动。
抓斗的升降绳和开闭绳各由1套卷扬机构操纵,卷扬机构的驱动电机为2台30kW绕线电机。
抓斗的所有电机都采用转子串电阻的方法启动和调速。
在抓斗的使用过程中存在以下问题:(1)由于采用转子串电阻的方法调速,机械振动大,行车不稳定,定位困难,抓斗摆动严重,容易造成机械设备的损坏。
转速随负荷变化,调速效果差,所串电阻因长期发热而使电能消耗较大,效率较低。
(2)抓斗的电机采用绕线电机,经常发生碳刷磨损严重、电机及转子绕线过热,造成维护量大。
另外,操作员在抓斗定位时,经常打反车,使电机产生过载现象,影响电机的使用寿命。
(3)由于抓取搬运工作的距离较近,电机处于频繁启动及变速状态,控制电机的时间继电器和交流接触器处于频繁动作状态,电气元件容易损坏。
(4)在抓取原煤后提升时,难以保证升降绳与开闭绳均匀受力,严重影响钢丝绳的使用寿命。
交流变频器调速已广泛应用到许多领域,而PLC可以实现输入、输出信号的数字化,利用编程能实现多种功能,由二者配合构成的数字控制系统,可大大改善原有的控制系统的功能,也可以解决桥式抓斗故障率高的问题。
2#1行车变频加PLC控制改造预期评估:(1)采用变频器及PLC对#1行车改造。
控制系统由于省去了切换转子电阻的交流接触器、串联电阻等电气元件,电气控制线路大为简化。
行车启动、制动、加速、减速等过程更加平稳快速,减少了负载波动,安全性大幅提高。

ATV系列变频器在行车上的应用变频器在这类应用选型时一般放大一档使用,同时,一定要选择阻值和功率相匹配的能耗制动电阻。
ATV58变频器在葫芦吊上的应用除了能提供以上突出功能外,还有许多优点,如内置了输入滤波器、输入电抗器、制动单元等,体积小,空间紧凑。
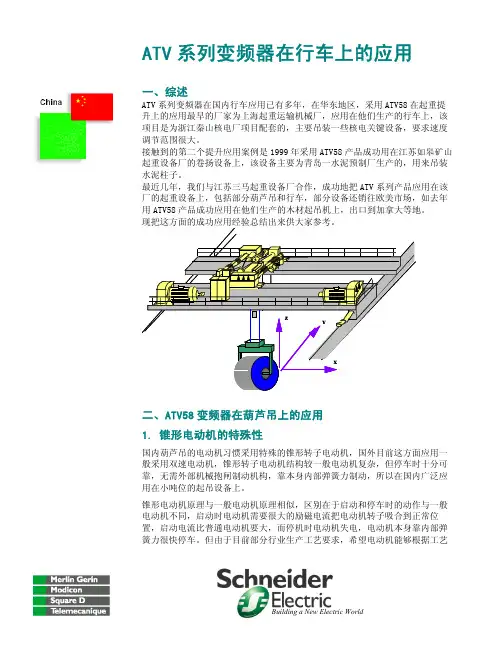
三、ATV 系列变频器在行车上的应用 1. ATV58变频器在行车起升电动机中的应用 行车上主要传动部分有起升机构、大车和小车,起升机构根据额定负载吨位要求,选择的变频器大小各不相同,如在上海浦东金桥的VOLVO 工程机械有限公司车间,16吨的行车电动机为22kw,选择的ATV58变频器功率为30kw,大小车采用ATV28变频器控制,分别为7.5kw 和3.7kw。
起升电动机一般自身带机械抱闸机构,抱闸机构与电动机动作的时序配合十分重要,以往不采用变频器控制时,往往启动时电流和机械冲击很大,在时序配其次,要考虑到停机时锥形电动机的特殊性,完全可以靠弹簧力制动,因此,停车方式改为自由停车,即把控制菜单中的STT参数设为“Freelwheel stop”,变频器一旦接到停车命令,输出马上截止,电动机靠本身弹簧力制动。
另外在起重应用中,有一个参数必须事先检查的是传动菜单里的“brA”参数,该参数在起重应用中务必设为“No”,不能让变频器在电动机减速过程中自由地延长减速时间,否则,在重物下放过程中,可能会产生溜钩现象。
要求调速,这样就存在调速问题,普通变频器无法满足其启动性能的要求,出现的问题是启动时无法让电动机转子吸合到电动机工作位置,因而无法运行。
2. ATV58变频器的特殊应用功能 ATV58变频器考虑到锥形电动机的特殊性,专门开发了满足该电动机特殊要求的功能,很好地满足葫芦吊的调速应用。
只要在设计主回路时稍作修改,把变频器串到主回路上,利用变频器的逻辑多段速度输入端子,通过吊装按钮盒的按钮开关直接对电动机的速度进行调节。
而变频器本身出厂缺省设置无法满足该应用要求,首先在驱动菜单调整参数SPC,从“No”改为“Yes”,这样,调整菜单中的Ufr参数的调节范围从0-150%,改为0-800%,从而使启动时IR补偿量的调节范围放大,根据现场具体情况,调整Ufr值,使之满足锥形转子电动机的特殊要求。
行车控制变频调整控制方案
导语:行车是一种内部搬运设备,广泛应用于车间和仓库。
一般情况下行车由四个锥形电机驱动,前后运动两个电机,左右运动一个电机,货物上下运动一个电机。
一、行车设备介绍:
行车是一种内部搬运设备,广泛应用于车间和仓库。
一般情况下行车由四个锥形电机驱动,前后运动两个电机,左右运动一个电机,货物上下运动一个电机。
行车电机可以用工频方式,通过接触器直接起动、停车、正转、反转,但启动电流大,设备处于冲击工作状态,振动大,噪声大,影响设备使用寿命,需要定期更换接触器,而且搬运定位精度低。
行车电机用变频器驱动,主回路无触点控制、无极调速,起动电流小,无冲击,无振动,噪声小,起升、行走定位准确,生产效率高,维护费用低。
变频器自身保护功能齐全,如过流、过载、过压等都能及时报警及停止,减少了行车故障,提高了安全性能。
二、行车控制系统配置:
1、AD300开环矢量控制变频器一台,控制前后运动的两台相同规格电机,变频器容量是两台电机容量之和,内置制动单元,根据电机功率选配制动电阻。
2、AD300开环矢量控制变频器一台,控制左右运动的电机,变频器容量和电机容量相同,内置制动单元,根据电机功率选配制动电阻。
3、AD300开环矢量控制变频器一台,控制上下运动的一个电机,变频器容量比电机容量提高两个规格,内置制动单元,根据电机功率选配制动电阻。

变频调速系统在行车卷扬机电气改造中的应用陈 峰 (武钢港务公司,430081)摘要:通过分析武钢行车主卷扬设备电气系统存在的问题,制定了科学的改造方案—基于P LC的变频调速系统,并组织设计、选型、实施,降低了设备故障率,取得了显著的经济效益。
关键词:行车;变频器;无级调速;选型;容量的确定中图分类号:T N773;T U974 文献标识码:B 文章编号:1004-0420(2007)06-0054-030 前言行车是应用非常广泛的一种机电设备,它能否正常运行直接影响物流转运和生产任务的完成以及人身和设备的安全。
武钢港务公司三作业区现有10台行车,它主要担负着武钢钢材的外发任务,设备状态的好坏直接影响钢材外发的进度。
该厂行车都是在上世纪80年代建成,2003年以前一直都沿用的是传统的行车电气传动系统,尤其是主卷回路电气元件冗杂,各类电气故障频发,严重影响了生产。
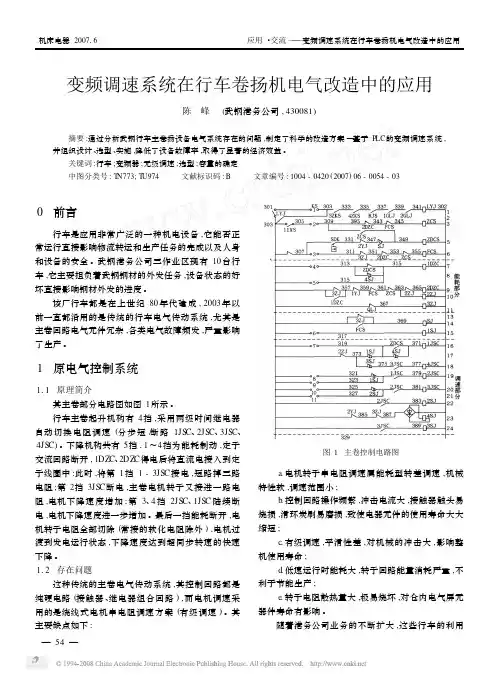
1 原电气控制系统111 原理简介其主卷部分电路图如图1所示。
行车主卷起升机构有4挡,采用两级时间继电器自动切换电阻调速(分步短/断路1JS C、2JSC、3JSC、4JS C)。
下降机构共有5挡,1~4挡为能耗制动,定子交流回路断开,1DZC、2DZ C得电后将直流电接入到定子线圈中:此时,将第1挡1-3JSC接电,短路掉三路电阻;第2挡3JS C断电,主卷电机转子又接进一路电阻,电机下降速度增加;第3、4挡2JS C、1JS C陆续断电,电机下降速度进一步增加。
最后一挡能耗断开,电机转子电阻全部切除(常接的软化电阻除外),电机过渡到发电运行状态,下降速度达到超同步转速的快速下降。
112 存在问题这种传统的主卷电气传动系统,其控制回路都是纯硬电路(接触器、继电器组合回路),而电机调速采用的是绕线式电机串电阻调速方案(有级调速)。
其主要缺点如下:图1 主卷控制电路图a.电机转子串电阻调速属能耗型转差调速,机械特性软,调速范围小;b.控制回路操作频繁,冲击电流大,接触器触头易烧损,滑环炭刷易磨损,致使电器元件的使用寿命大大缩短;c.有级调速,平滑性差,对机械的冲击大,影响整机使用寿命;d.低速运行时能耗大,转子回路能量消耗严重,不利于节能生产;e.转子电阻散热量大,极易烧坏,对仓内电气屏元器件寿命有影响。
AB起升参数表优化步骤:先设置电机铭牌和49组参数——再设53和80组参数——然后361-366设为0 ——61为2——手动打开制动器——起动电机按钮。
等到61为0时,优化完成。
再设199=1保存。
变频器断电在设置其他参数,输其它参数前196设为2。
ESC+ ALT + +/-进入参数表。
参数号参数值参数名称说明Motor control:电机控制41Motor NP Volts电机铭牌电压42Motor NP FLA电机铭牌满负载电流43Motor NP Hertz电机铭牌频率44Motor NP RPM电机铭牌每分钟转速45Motor NP Power电机铭牌功率48 1.8Motor OL Factor电机过载倍数496Motor Poles电机磁极对数P=60f/n534Motor Cntl Sel电机控制方式选择 4为FVC矢量控制5555HZ Maximum Freq设置变频器输出频率最大值56bit5,8=1Compensation补偿:使能禁止校正功能 BIT5=1电动机线反向 BIT8=1571Flux Up Mode磁通建立方式 1为自动 0为手动580.07xp Flux Up Time磁通建立时间:当57设为0时,该项得设置,为电机铭牌功率的0.007倍611,2Autotune自整定电机优化:静态为1,动态为2Speed control:速度控制790Speed Units速度显示单位 0为HZ 1为RPM801Feedback Select反馈选择 1为滑差补偿 用户需要紧密速度控制并带有编码器的场合3encoder3为带编码器的场合 带编码器时必须设为3 415组可以看编码器的速度814Minimum Speed最小速度8250Maximum Speed最大速度832Overspeed Limit超速限制值按9011Speed Ref A Sel速度基准A选择 11为预置速速19311Speed Ref B Sel速度基准B选择 11为预置速度1变频器面板中间会出现数字框1017一档 001根据程序设定10250四档 010根据程序设定输入103010420二档 100根据程序设定此时面板第一排是参数组名41105010635三档 110根据程序设定修改参数:按数字键或上下键将修改的参数数值输入1070要修改或查看改其它参数组按1402Accel Time 1加速时间1Dynamic control 动态控制1422Decel Time 1减速时间1修改56组和238组参数时,先进行上述操作进入该组参数1465S Curve %S曲线时间 设置减速时间和减速时间的百分比153-300%Regen Power Limit 再生能量限制值 设置电机传送到直流母线所允许的最大功率限制值按切换至对应组数,如bit51551Stop Mode A停机模式A:1为斜坡运行1613Bus Reg Mode A母线调节器模式A:3为动态制动以上任何步骤中都可按返回上步操作1631DB Resistor Type动态制动电阻类型:1为外部电阻器294.010Control SW Ver控制软件版本Utility 实用1962Param Access Lvl参数访问级别 1为高级 2为保留 3为风机/泵 4为高级风机/泵变频器报故障时的面板显示如:1971Reset To Defalts恢复至缺省值 1为工厂设定值(参数196,201,202,600除外)1991Save To User Set保存到用户参数组238bit8,12=1Fault Config 1故障组态1 BIT8=1为内部相丢失使能 BIT12=1为外部相丢失使能2401Fault Clear1为清除故障 2为清除故障列表该故障代码为F5,参照变频器说明书第4章查看故障代码对应的故障原因和处理方法解决问题3618Digital In1 Sel数字量输入1选择 8为正向运行3629Digital In2 Sel数字量输入2选择 9为反向运行3630Digital In3 Sel数字量输入3选择 0为未使用36417Digital In4 Sel数字量输入4选择 速度选择336516Digital In5 Sel数字量输入5选择 速度选择236615Digital In6 Sel数字量输入6选择 速度选择13804(600相关)Digital Out1 Sel数字量输出1选择 4 为运行3841Digital Out2 Sel数字量输出2选择 1 为故障3881Digital Out3 Sel数字量输出3选择 1 为故障5451000输入相丢失检测54650输出相丢失检测Input&Output 输入与输出变频器面板按顺序按面板上的ESC+ ALT + +/-进入参数表。
变频器在桥式起重机上的应用实例上海市黄渡起重机械厂技术科沈国良桥式起重机俗称行车,是工矿企业中应用十分广泛的一种起重机械,其运行机构的三个基本独立的拖动系统形成,大车拖动系统,小车拖动系统,吊钩拖动系统组成,行车对小车和大车的拖动要求一般,变频器的普通功能即可实现,这里不在详述,下面着重介绍如何解决生产过程中主副钩力矩的配合问题。
一、问题的提出我公司为上海航空发动机厂制造的QD型30/5t * 22.5m抓斗式吊车为该类起重设备,运转率高,操作频繁,又因其为典型的继电器,接触器控制模式,经常出现接触器触点烧损,引起电机缺相,烧坏电机,加上碳刷的频繁更换,滑环的磨损等都大大增加了维护量和生产成本。
同时也多次因吊机的故障导致主机停车,严重影响了该公司的正常生产,为扭转被动局面,优化设备配置,我公司决定对该吊车进行变频改造。
二、改造中需要解决的几个问题1、起动时,电机除克服负载转矩外,还必须克服静摩擦力,拖动系统应有足够大的力矩。
2、吊车下降时,系统要克服重物因重力加速度而不断加速造成“飞车”事故。
3、重物在空中停留前后,不能出现“溜钩”现象。
4、频繁正反转要求制动可靠,制动时间尽可能短,以便于提高工作效率。
三、变频器调速系统的特性,有以下几点:1、起动转矩大,可达200%,抗冲击能力强,适合频繁正反转起动。
2、采取闭环矢量控制功能的变频调速系统,多段速度控制方式能够满足吊车运行要求,软件功能强大,提供各类工程流程所需的应用宏。
3、各项保护功能完善,具有过压保护、过流保护、欠压保护、接地故障保护、输入输出缺相保护、变频器过热保护、电动机过载保护、失速保护、电动机欠载保护以及+24V和+IOV参考电压短路保护等多项保护。
4、带有FCDRIVE微机调试工具,变频器配有RS232标准接口,便于外部通讯和远程诊断,以及各类应用宏程序的下载安装。
5、具有动态制动的特点,可采用外部连接制动电阻或使用内部制动电阻的制动断续器,有效控制、改变电动机运行状态。
淮北市热电有限公司#1、#2行车变频改造方案编制:史拥军2013年3月8日淮北市热电有限公司#1行车变频器与PLC控制改造方案1 引言我公司#1行车是5T桥式抓斗行车,由操作台、运行机构和桥架组成的。
运行机构是由三个基本独立的拖动系统组成:1、大车拖动系统。
拖动整台桥式抓斗顺着车间做“横向”运动(以操作者的坐向为准),大车的行走由2 台11kW绕线电机牵引。
2、小车拖动系统。
拖动抓斗顺着桥架作“纵向”运动。
小车的行走由1台3.7kW的绕线电机牵引。
3、抓斗吊拖动系统。
拖动抓斗作吊起、放下的上下运动及抓斗的放开、闭合运动。
抓斗的升降绳和开闭绳各由1套卷扬机构操纵,卷扬机构的驱动电机为2台30kW绕线电机。
抓斗的所有电机都采用转子串电阻的方法启动和调速。
在抓斗的使用过程中存在以下问题:(1)由于采用转子串电阻的方法调速,机械振动大,行车不稳定,定位困难,抓斗摆动严重,容易造成机械设备的损坏。
转速随负荷变化,调速效果差,所串电阻因长期发热而使电能消耗较大,效率较低。
(2)抓斗的电机采用绕线电机,经常发生碳刷磨损严重、电机及转子绕线过热,造成维护量大。
另外,操作员在抓斗定位时,经常打反车,使电机产生过载现象,影响电机的使用寿命。
(3)由于抓取搬运工作的距离较近,电机处于频繁启动及变速状态,控制电机的时间继电器和交流接触器处于频繁动作状态,电气元件容易损坏。
(4)在抓取原煤后提升时,难以保证升降绳与开闭绳均匀受力,严重影响钢丝绳的使用寿命。
交流变频器调速已广泛应用到许多领域,而PLC可以实现输入、输出信号的数字化,利用编程能实现多种功能,由二者配合构成的数字控制系统,可大大改善原有的控制系统的功能,也可以解决桥式抓斗故障率高的问题。
2#1行车变频加PLC控制改造预期评估:(1)采用变频器及PLC对#1行车改造。
控制系统由于省去了切换转子电阻的交流接触器、串联电阻等电气元件,电气控制线路大为简化。
行车启动、制动、加速、减速等过程更加平稳快速,减少了负载波动,安全性大幅提高。