雷达杂波抑制关键技术研究
- 格式:docx
- 大小:28.42 KB
- 文档页数:3
船载雷达海杂波去除算法研究及其应用船载雷达是一种重要的海洋观测设备,可以用于海洋探测、海情监测、船舶导航等领域。
然而,在使用船载雷达进行海洋探测时,由于海洋环境的复杂性,往往会受到海杂波的干扰,从而影响了雷达的探测效果。
因此,如何准确去除海杂波的干扰,是船载雷达应用研究的重要方向之一。
1. 船载雷达海杂波的特征船载雷达海杂波是由海洋环境的复杂性所引起的一种干扰,其特征是具有很宽的频率带宽、强度不均、杂乱无章、且随着时空变化而不断变化。
船载雷达常见的海杂波有以下几种类型:(1)表面波干扰:由于海洋表面的波浪运动而形成的一种干扰,在船载雷达的探测过程中,经常会被误判为目标信号。
(2)散射干扰:由海水中颗粒、气泡等物质所产生的散射信号,会与真实目标信号混淆在一起。
(3)多径干扰:由于雷达信号在传播过程中经历了反射、散射、绕射等多种路径,形成的一种多径信号干扰。
这些海杂波干扰会严重影响到船载雷达的探测效果,降低探测率和定位精度,因此需要研究相应的处理算法来去除海杂波干扰。
2. 船载雷达海杂波去除算法研究现状目前,船载雷达海杂波去除算法主要包括滤波算法、时域积分算法、小波变换算法等。
其中,滤波算法是最常用的一种去除海杂波的手段,它采用滤波器对雷达接收到的信号进行滤波处理,使得海杂波信号在滤波过程中被抑制,从而去除海杂波的干扰。
滤波算法主要分为线性滤波算法和非线性滤波算法两种类型。
线性滤波算法包括平均滤波、中值滤波、高斯滤波等,它们都具有简单、易实现的优点,但是其去除海杂波的效果并不理想。
非线性滤波算法则主要包括自适应中值滤波、小波变换滤波等,这类算法可以自适应地根据海杂波的特征进行处理,从而更好地去除干扰。
除了滤波算法外,时域积分算法也是一种常用的海杂波去除算法。
该算法主要是通过时域上对信号进行积分,从而去除杂波的一种方法。
时域积分算法可以有效地去除高频干扰,但是其对低频干扰的抑制效果不是太好。
小波变换算法则是近年来研究比较热门的一种海杂波去除算法。
基于延迟锁定环跟踪对消技术的穿墙雷达杂波抑制郑晨;席晓莉;宋忠国【摘要】穿墙雷达成像中,墙体反射波等杂波严重影响成像效果.针对现有子空间技术等方法在去杂波同时会对目标信息造成消减这一问题,本文采用M序列雷达,提出一种多级延迟锁定环路技术.该方法对墙体反射波、直达波等强杂波时延分别进行准确估计,重建干扰杂波信号并从入射信号中消减,实现对杂波干扰的有效抑制,可以广泛的应用于执法、救援及反恐等各领域.结果表明,与平均消去、子空间杂波抑制技术对比,在不同噪声环境下,本方法均能够有效的抑制干扰,图像改善因子分别提高了1~6dB,目标成像效果得到大幅度改善.【期刊名称】《电子学报》【年(卷),期】2018(046)009【总页数】7页(P2181-2187)【关键词】穿墙雷达;目标探测;杂波抑制;延迟锁定环;信号重建;改善因子【作者】郑晨;席晓莉;宋忠国【作者单位】西安理工大学自动化与信息工程学院,陕西西安710048;西安理工大学先进导航与电磁技术研究所,陕西西安710048;西安理工大学自动化与信息工程学院,陕西西安710048;西安理工大学先进导航与电磁技术研究所,陕西西安710048;西安理工大学自动化与信息工程学院,陕西西安710048;西安理工大学先进导航与电磁技术研究所,陕西西安710048【正文语种】中文【中图分类】TN9571 引言穿墙雷达广泛应用于执法、反恐等各个领域[1~3].穿墙雷达探测成像中,电磁波穿过墙体会产生反射、折射和速度的改变,导致信号时延、失真,墙后目标的影像会产生位移,鬼影等影响成像效果[4].同时当电磁波信号穿过墙体时能量大幅衰减,导致墙体后方目标回波信号微弱,而墙体的反射波、收发天线之间的直达波等信号的幅度往往远大于目标回波,严重的干扰了目标的成像效果,因此穿墙雷达中墙体的杂波抑制技术受到越来越多的关注[5~7].背景消除法作为穿墙探测中的墙体杂波抑制技术简单方便,拥有卓越的墙体杂波抑制能力,但是此方法需要提前获得没有目标时的墙体背景回波数据,在实际应用中往往很难实现.基于奇异值分解的子空间技术[8,9]具有优良的性能,通过对回波信号矩阵进行奇异值分解,分别得到杂波子空间、目标子空间以及噪声子空间,通过去除相应的特征值来去除墙体杂波.这种方法虽然具有良好的杂波抑制能力,但由于目标数量、位置以及墙体介质的不同,墙体子空间所对应的特征值有时难以区分[10],会造成墙体杂波抑制效果变差或者目标信息被削弱,对成像造成影响.穿墙雷达可以发射多种波形体制进行穿透探测,如脉冲雷达[11],频率步进雷达[12],调频连续波雷达[13],伪随机噪声雷达[14]等等.其中伪随机噪声雷达具有低功率,抗干扰能力强以及优良的隐藏特性并且不易被第三方侦测到优点,伪随机M序列雷达作为噪声雷达的一种,具有良好的自相关性和互相关特性,并且信号产生方便,因此特别适应于城市巷战,人质救援等领域.本文采用经载波调制的M序列扩频雷达进行穿墙探测.提出一种基于延迟锁定环路的穿墙雷达杂波跟踪对消(Clutter-Tracking-and-Cancellation,CTC)技术,该方法通过对信号时延进行精确估计并对杂波跟踪对消处理,在抑制墙体杂波时并不会造成目标信息的损失,提高了目标的成像性能.2 穿墙探测模型穿墙雷达探测中,接收天线处收到包括目标反射波、墙体反射波、天线之间的直达波以及噪声等多种信号.发射天线与接收天线沿墙体水平移动,形成合成孔径雷达探测目标并成像,如图1所示.电磁波的传输方向和速度取决于墙体的介电常数与墙体厚度,当收发天线移动到位置m处时,对于墙体后方的目标P,电磁波的传播时延由下式给出[15]:(1)式中:r为电磁波传播的距离;下标m表示收发天线移动到第m个位置;下标air 与wall分别表示电磁波在自由空间和墙体内的传播距离;ε为墙体的介电常数;c 为光速.接收天线收到回波信号可以表示为:Sr=Sr,air+Sr,wall+Sr,p+N(2)式中:Sr,air为发射天线到接收天线的直达波信号;Sr,wall为墙体的回波信号,包括墙体的1次回波信号,2次回波信号以及多次回波信号;Sr,p为墙后目标P的回波信号;N为环境噪声.假设发射天线发射的信号为S(t),由载波调制伪随机M序列产生:S(t)=Am(t)cos(ωt+θ)(3)式中:A为信号的幅度;ω为载波频率;θ为载波初相位;m为伪随机序列,由移位寄存器生成,具有优良的自相关特性.对于离墙探测方式,墙体位于天线的远场区,信号经过多次墙体、目标的反射后,忽略电磁波的近场效应,接收天线xr,m收到的信号可以表示为:Sr,m(t)=αm,airm(t-τm,air)cos(ω(t-τm,air)+θm,air)+θm,wall,n)+αm,pm(t-τm,p)cos(ω(t-τm,p)+θm,p)+n(t)(4)式中:τm,air,τm,wall,n,τm,p分别表示直达波、墙体的n次反射波以及目标回波的时延;αm,air,αm,wall,n,αm,p分别为各反射信号对应的幅值;θm,air,θm,wall,n,θm,p为信号相位;n(t)为接收天线的噪声.而对于贴墙探测方式,式(4)由于并未考虑波形畸变,直达波与墙体回波相互融合等问题,存在有较大的误差,关于此种情况本文在第5节中予以讨论.对上述接收信号进行去载波解调后,可以获得基带信号:Sd,m(t)=αm,airm(t-τm,air)cos(θm,wall,n-θm,air)+αm,pm(t-τm,p)(θm,p-θm,air)+n(t)(5)在接收天线处复现与发射信号中相同的M序列,并与基带信号进行相关处理,得到相关信号·cos(θm,wall,n-θm,air)(6)式中:m(t)为本地复现的M序列;为估计的M序列偏移量;为的函数;为相关函数,定义为:(7)式中,T为M序列的周期.将式(7)带入式(6),在估计偏移量不等于任一实际回波时延时,由于M序列优良的自相关性,相关函数R趋近于0,此时也趋近于0;当估计偏移量等于τm,air时,式(6)中的第一部分达到最大值,同时,式中的与仍然趋近于0,此时函数出现峰值;同理,当估计偏移量分别等于τm,wall,n与τm,p时,式(6)中的相应部分达到最大值,出现峰值,因此,可以通过函数的峰值位置来分别估计直达波、墙体杂波以及目标回波的时延信息.通常情况下,墙体的回波能量比直达波的能量要弱的多,目标的回波能量比这两种回波能量还要弱很多,因此对于相关信号目标的相关峰强度也会弱很多,在成像过程中,会造成目标信号过弱导致成像质量不佳,再加上环境噪声的影响,目标淹没于噪声中也会导致探测成像失败.本文所提出的CTC技术可以很好的改善上述这些问题.3 杂波跟踪对消(CTC)技术由于不同位置处的天线信号处理方法相同,为了方便起见,本文在下面的公式中省略了表示天线不同位置的下标m.为了在接收信号中找到微弱目标的回波峰值必须抑制回波信号中的直达波和墙体反射波等强杂波.图2为CTC技术的信号处理流程图,接收天线处的回波信号经过多级的杂波跟踪,逐次对消掉直达波,墙体反射波等杂波,最后提取出目标回波信息并进行成像.每一级的杂波跟踪环路结构相同,输入信号首先与本地产生与载波频率相同cos和sin进行相乘去载波,通过低通滤波去除高频分量后得到I路信号SI(t)和Q路信号SQ(t):sI(t)=m(t-τ)cos(ωet+θe)sQ(t)=m(t-τ)sin(ωet+θe)(8)这两路信号分别与超前半个码片和滞后半个码片的M序列进行相关累加:(9)式中:m(·)为M序列;为M序列偏移时间;δ为M序列的码片时间;T为相关累加时长,一般取为M序列周期.将式(8)带入式(9)中,可以得到:(10)式中,R(·)为M序列的自相关函数,为接收信号与本地产生的M序列的相位时延,fe=ωe/2π,φe=ωeT/2+θe分别为频率与相位差.同理可以按照式(10)写出IL,QE,QL,也就是说,这4个值为M序列相位未对齐时的自相关值.随后这4个值被送入鉴别器,本文选择非相干超前滞后鉴相算法[16]来计算与实际回波信号中的M序列延迟的误差Δτ,如式(11)所示.此误差用来修正M序列发生器的时延在此基础上产生一组新的超前滞后半个码片的M序列.该序列与接收到的信号继续进行式(8)到式(11)的处理过程,通过反馈调节,不断循环,直到计算出的误差Δτ小于所设置的门限.此时估计出的延迟即为回波信号中的M序列延迟.τerror=Δτ(11)根据估计出的回波延迟与载波即可生成本地还原的信号:y0(t)=A0m(t-τ0)cos(ω(t-τ0)+θ0)(12)式中:τ0为估计的M序列延迟,等于实际回波信号中的直达波信号延迟.θ0为信号相位,可以通过锁相环(PLL)技术得到;A0为信号幅值,通过自适应滤波计算[17].从天线收到的回波信号中,减去式(12),即相当于从回波总信号中抑制掉直达波信号.剩余的信号继续输入下一级进行上述处理,对于不同的天线位置来说,目标距离天线的远近不同因而不同天线处的目标回波时延不同,而墙体的回波时延相同,可以根据回波时延不同来避免目标回波信号被抑制除去.4 CTC技术成像为了接近真实的回波数据,本文采用时域有限差分法(Finite-Difference Time-Domain,FDTD)产生模拟数据,FDTD方法已被证明是在电磁仿真中的一种非常准确并且有效的方法.本文选取时间步长0.166ps,网格大小0.01m×0.01m.发射天线与接收天线相距30cm,沿墙面x轴水平移动,共移动26次,每次0.1m.成像区域3m×5m,每像素1cm×1cm.墙体厚0.3m,相对介电常数4.5.墙体后方有6个目标,天线xt,m发射经过载波调制的M序列,载波频率1.5GHz,M序列每周期共1023位,频率1.023GHz.本文采用后向投影(Back Projection,BP)技术进行成像,成像结果如图3所示.图3(a)图为应用背景消去法后的目标图像,可以很好的看见6个目标.图3(b)中已经无法区分P3,P4两个目标,并且目标成像质量不佳.图3(c)与图3(d)分别为子空间法和本文所提出的方法,对比两幅图,可以看出CTC技术拥有更好的成像结果.5 CTC技术性能分析5.1 波形畸变对CTC技术的影响当收发天线距离墙体较近,采用贴墙探测方式时,式(4)无法精确的描述回波信号,这时直达波往往和墙体回波融为一体,同时波形的畸变也会变得严重.因此我们对CTC技术在贴墙探测时的杂波抑制能力进行讨论,我们将天线贴墙放置,此时回波信号的波形发生畸变,并且在波峰波谷,尤其是在M序列码翻转处,信号发生较大突变.我们对回波信号进行载波解调后低通滤波去除高频分量,得到M序列信号,结果如图4(a)所示.图中红色虚线为未畸变的理想回波信号的M序列,蓝色实线为实际畸变信号的M序列,图中可以看出,在贴墙探测方式下,虽然回波信号在一定程度发生了畸变,但回波信号上所调制的M序列的相位信息并未发生变化,也就是说在贴墙探测下,通过CTC技术可以准确的估计出信号的时延.当天线贴墙探测时,CTC技术的杂波对消效果如图4(b)所示,目标信息清晰可见,但是由于回波信号较大的畸变,CTC技术复现出的由标准正弦波调制M序列的直达波与墙体回波,并不能完全对消掉原始回波中的杂波信息,因此目标回波信息中残留有少量的直达波与墙体回波相关峰信息.我们分别计算了贴墙探测和离墙探测两种模式下,CTC技术杂波对消效果,如表1所示,其中离墙探测的天线距离前墙面为50cm.可以看出,贴墙探测模式下,天线距离墙体较近,电磁波传播路径较离墙探测模式短,目标回波衰减较小,因此目标强度强于离墙探测模式.但是在贴墙探测下,CTC技术对消后残留有较多的杂波,杂波相关峰较强,导致杂波抑制能力下降.表1 杂波对消效果离墙探测贴墙探测目标相关峰强度5.69E+096.12E+09杂波相关峰强度0.65E+091.59E+09杂波与目标峰之比0.110.25由以上分析可知,当天线贴近墙体时,CTC技术依然可以得到良好的杂波对消效果,但回波信号较大的畸变会对CTC技术产生一定程度的影响.5.2 成像精度本文提取出图像目标点的峰值位置作为目标的成像位置,与目标的实际位置进行了对比.对墙体后方6个目标探测的成像精度如表2所示,从表中可以看出,6个目标的成像位置与实际位置的横纵坐标误差都在2cm以内,因此该方法具有良好的成像精度.表2 目标成像精度目标真实位置成像位置P1(1.7m,0.3m)(1.70m,0.32m)P2(2.5m,1.0m)(2.51m,1.02m)P3(1.0m,2.0m)(1.0 0m,2.02m)P4(1.3m,2.0m)(1.30m,2.02m)P5(1.5m,3.0m)(1.50m,3.02m)P6(2.5 m,4.0m)(2.51m,4.01m)5.3 抗噪声能力为了说明在不同噪声情况下的成像效果,本文在多目标成像的基础上,分别引入了信噪比为-10dB与-20dB的噪声,对比了不同噪声情况下成像效果.图5所示为在目标信号信噪比为-10dB的情况下,天线移动到第20个位置时所接收到的信号杂波抑制效果.图5(a)所示为对天线接收的原始信号进行相关处理后的图形,图中可以看到明显的直达波与墙体回波信号的强的相关峰值,图5(b)为图5(a)的放大,可以看到此时目标的相关峰淹没于强烈的杂波中从而不可见.图5(c)图为经过杂波抑制后的相关峰图形,图中可以看出,此时强烈的直达波与墙体回波等杂波已经被良好的抑制,从而6个目标的相关信息清晰可见.图6所示为信噪比分别为-20 dB 下多目标的成像效果,可以看出,在强噪声水平下,本方法同样具有良好的成像性能.5.4 图像改善因子为了定量的描述杂波抑制效果,本文采用改善因子(Improvement Factor,IF)来比较不同杂波抑制方法的成像性能.IF表明了在应用杂波抑制后目标图像的改善能力[10],IF定义为:(13)其中,TCR0为采用杂波抑制技术后,图像的目标杂波比(Target-to-Clutter Ratio,TCR),TCRi为未使用任何抑波技术的原始图像的目标杂波比.图像的目标杂波比由下式计算:(14)式中:At为目标区域;Ac为去除目标区域后的全部成像区域;Nt与Nc分别为目标区域和杂波区域的成像像素点数;I(x,y)为成像区域坐标(x,y)处的图像幅值.图7所示为墙体后方有6个目标,分别在无噪声,SNR=-10,SNR=-20情况下不同杂波抑制技术成像结果的改善因子.背景消去法作为一种理想的杂波抑制技术拥有最好的目标图像改善能力,本文所提出的CTC技术相比于现有其它的抑制技术,改善因子分别有1~6dB的提高,尤其在高噪声环境下,具有更好的目标图像改善能力.6 结论本文针对穿墙雷达目标成像技术,提出一种用于抑制强杂波的跟踪对消技术.该技术通过搜寻杂波的回波时延后从原始回拨中消去杂波信号,改善目标成像效果.仿真实验结果表明,相比于平均消除抑制杂波的方法和利用子空间技术获得目标子空间的方法,该方法具有更好的目标图像增强能力,目标图像改善因子高于其他方法,并且成像效果接近理想的背景消去法.同时,该方法收敛速度快,抗噪声能力强,成像精度高,并且可以在相对较低的M序列频率下获得良好的抑制杂波能力,降低了硬件成本.然而,贴墙探测电磁波的近场效应会对杂波对消产生一定的影响,未来我们将继续开展CTC技术在贴墙探测时的杂波抑制研究.参考文献【相关文献】[1] WANG W,LU B Y,QIU L,et al.A modified adaptive sidelobe reduction method for through-the-wall radar imaging[J].IEEE Geoscience and Remote SensingLetters,2016,13(9):1255-1259.[2] AHMAD F,QIAN J,AMIN M G.Wall clutter mitigation using discrete prolate spheroidal sequences for sparse reconstruction of indoor stationary scenes[J].IEEE Transactions on Geoscience and Remote Sensing,2015,53(3):1549-1557.[3] AHMAD F,AMIN M G.Noncoherent approach to through-the-wall radar localization[J].IEEE Transactions on Aerospace and Electronic Systems,2006,42(4):1405-1419.[4] 张华美,张业荣,王芳芳.墙体参数未知时的穿墙雷达实时成像方法[J].电子学报,2016,44(7):1613-1618.ZHANG Hua-mei,ZHANG Ye-rong,WANG Fang-fang.A real-time approach for through-the-wall imaging under unknown wall characteristics[J].Acta ElectronicaSinica,2016,44(7):1613-1618.(in Chinese)[5] SOLIMENE R,CUCCARO A.Front wall clutter rejection methods in TWI[J].IEEE Geoscience and Remote Sensing Letters,2014,11(6):1158-1162.[6] 张斓子,陆必应,周智敏,等.基于空间特征的MIMO穿墙雷达墙杂波抑制[J].电子与信息学报,2014,36(4):946-952.ZHANG Lan-zi,LU Bi-ying,ZHOU Zhi-min,et al.A wall clutter suppression method based on spatial signature in MIMO through-the-wall radar imaging[J].Jounal of Electronics & Information Technology,2014,36(4):946-952.(in Chinese)[7] KIM Y,HA S,KWON J.Human detection using doppler radar based on physical characteristics of targets[J].IEEE Geoscience and Remote Sensing Letters,2015,12(2):289-293.[8] TIVIVE F,BOUZERDOUM A,AMIN M G.An SVD-based approach for mitigating wall reflections in through-the-wall radar imaging[A].IEEE Radar Conference[C].Kansas City,MO,USA:IEEE,2011.519-524.[9] CHEN X,XUE S J,FENG D,et al.A new wall clutter reduction strategy for through wallradar imaging[A].12th International Conference on SignalProcessing[C].Hangzhou,China:IEEE,2014.2102-2105[10] TIVIVE F,BOUZERDOUM A,AMIN M G.A subspace projection approach for wall clutter mitigation in through-the-wall radar imaging[J].IEEE Transactions on Geoscience and Remote Sensing,2015,53(4):2108-2122.[11] ZHANG X H,XI X L,LI M C,et parison of impulse radar and spread-spectrum radar in through-wall imaging[J].IEEE Transactions on Microwave Theory and Techniques,2016,64(3):699-706.[12] ZHANG B W,ZHU G F.High frame rate stepped frequency through-wall imaging radar[A].IEEE International Wireless Symposium[C].Shenzhen,China:IEEE,2015,1-4. [13] JOSE T,PABLO A,MATEO B,et al.Through-the-wall surveillance with millimeter-wave LFMCW radars[J].IEEE Transactions on Geoscience and Remote Sensing,2009,47(6):1796-1805.[14] SUSEK W,STEC B.Through-the-wall detection of human activities using a noise radar with microwave quadrature correlator[J].IEEE Transactions on Aerospace and Electronic Systems,2015,51(1):759-764.[15] AHMAD F,AMIN M G,KASSAM S,et al.A wideband,synthetic aperture beamformer for through-the-wall imaging[A].IEEE International Symposium on Phased Array Systems and Technology[C].Boston,MA,USA:IEEE,2003.187-192.[16] 谢钢.GPS原理与接收机设计[M].北京:电子工业出版社,2011.314-317.[17] CHEN X,DOVIS F,PENG S L,et parative studies of GPS multipath mitigation methods performance[J].IEEE Transactions on Aerospace and ElectronicSystems,2013,49(3):1555-1568.。
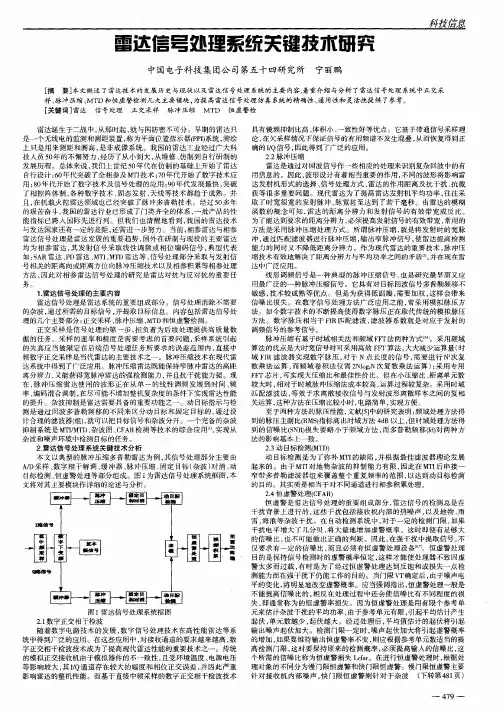
文章编号:16711742(2011)02015504ADWR X 型多普勒天气雷达批处理模式地物杂波抑制的研究黄裕文(中国民用航空飞行学院,四川绵阳621000)摘要:以ADWR X 型雷达为背景,重点研究低仰角批处理模式抑制地物杂波的信号处理,比较得出在实际探测环境下批处理模式应用地物杂波滤波的效果优越于低仰角警戒模式和低仰角多普勒模式下的滤波效果,实际应用表明:方法运用到ADWR X 型雷达能实现低仰角批处理模式地物杂波滤波,滤波器对地物杂波的抑制能力达到30-50dB,滤波器对天气回波的衰减小于6dB,每个体扫节约2个cut 的时间,约60s 。
关键词:气象探测;天气雷达;地物杂波抑制;批处理模式中图分类号:TN957.54文献标识码:A 收稿日期51引言绵阳南郊机场现在使用的风灵ADWR X 型天气雷达是民航首次引进的具有中国自主产权的机场终端多普勒天气雷达,从目前试用情况看,该雷达在低仰角采取了连续警戒模式和低仰角多普勒模式相结合的方法,这样虽然可以有效地去除地物杂波污染,也可以解决距离模糊。
但是这种方法必须在同一仰角做两次PPI(平面位置显示)扫描,探测占用时间较多[1]。
而影响飞行的风切变、湍流等灾害性天气现象存在的时间较短,要求能够及时探测并做出预报。
如果能够在低仰角用批模式代替连续警戒模式和低仰角多普勒模式,那么就可以缩短探测时间,及时做出快速的预报。
低仰角探测的数据的准确性对本场大密度飞行安全的保障显得更为重要,要把批模式应用于低仰角必须解决地物杂波抑制问题[2]。
现有的天气雷达还没有使用批处理模式做地物杂波滤波处理,文中实现了在雷达低仰角批处理过程中使用5阶椭圆IIR(无限脉冲响应)滤波器进行地物杂波抑制,不仅缩短低仰角探测所占用的时间,而且提高对地物杂波的抑制能力,从而提高雷达测量基数据的准确性。
2多普勒天气雷达信号处理模式多普勒雷达两难问题就是解决距离速度模糊。
设计不同PRT(脉冲重复周期)用于不同信号处理模式,主要有连续警戒模式(CS)、连续多普勒模式(CD)、批处理模式(B)3种[3]。
科技与创新┃Science and Technology&Innovation ·112·2020年第15期文章编号:2095-6835(2020)15-0112-02地波雷达电离层杂波干扰及抑制措施韦有平(福建厦门同安海军92985部队,福建厦门361100)摘要:地波雷达收发射天线非理想性,导致雷达干扰影响探测性能问题,对电离层杂波干扰多普勒频谱、传播模式等进行了分析。
列举了几种抑制此类干扰的技术措施,为地波雷达抗干扰提供借鉴。
关键词:地波雷达;电离层杂波;干扰抑制;抑制措施中图分类号:TN957文献标识码:A DOI:10.15913/ki.kjycx.2020.15.049地波雷达运行过程中会受到一定程度的干扰,并非处理理想的运行状态,存在着向上发射经天波传播、沿海面传播方式,其中部分能量在运行过程中会经过电离层而放射,天线能够接收这部分能量,在一定程度上干扰了电离层杂波的运行,现实工作中,经常出现的干扰因素为3~10MHz电离层杂波干扰,属于高频段的低端,表现最为明显的运行雷达为距离在400km的远程地波雷达,往往具有3~5MHz 工作频率。
电离层杂波干扰原因复杂,其原因包括电离层分层结构不够平稳、分层结构不够均匀。
为了有效解决这一问题,可以设置一个较大的工作频率,比相应电离层临界频率大,以此缓解地波雷达电离层杂波干扰,使电波传播过程中能够穿透电离层,这种运用方式在消除干扰的同时也增加了发射功率,为了确保探测距离,一般要求在3~5MHz波段以获得较小的衰减。
对电离层杂波特性的解读影响着对抑制电离层杂波干扰以及所能够取得的干扰效果。
1典型的电离层杂波干扰多普勒频谱地波雷达探测基于获得目标的多普勒回波。
大量的地波雷达实测数据表明,电离层杂波可以出现在100km以外的区间,不同的昼夜时间、不同的季节,电离层杂波干扰所影响的距离元、杂波的多普勒频移、多普勒扩展度,以及电离层杂波的强度不同。
相控阵天气雷达关键技术研究相控阵天气雷达关键技术研究摘要:相控阵天气雷达是一种基于相控阵扫描技术的新型雷达系统,具有高分辨率、高精度和多任务能力等优势。
本文主要介绍了相控阵天气雷达的工作原理和关键技术,包括雷达信号处理、天线阵列设计、波束形成与跟踪技术等。
通过研究和分析这些关键技术,相信可以进一步提高相控阵天气雷达的性能和可靠性。
一、介绍天气雷达是一种常用的气象探测装置,用于实时监测大气中的降水、云团等天气现象。
相控阵天气雷达是天气雷达的一种新型形式,利用计算机和数字信号处理技术实现了雷达信号的高速采集和处理,从而提高了雷达的分辨率和精度。
相控阵天气雷达不仅可以用于天气预报和气象研究,还可以用于航空、气象监测等领域。
二、相控阵天气雷达的工作原理相控阵天气雷达主要由天线阵列和信号处理系统两部分组成。
天线阵列是相控阵天气雷达的核心部件,它由大量天线单元组成,每个天线单元都可以独立发射和接收雷达信号。
天线单元之间的相对时间差和相对幅度差可以用来控制和调节波束的形状和方向。
信号处理系统主要负责将接收到的雷达信号进行预处理、波束形成和目标跟踪等操作。
三、相控阵天气雷达的关键技术(一)雷达信号处理相控阵天气雷达的雷达信号处理是相当关键的一环,它直接影响到雷达系统的性能和可靠性。
雷达信号处理主要包括雷达波束的形成、杂波抑制和目标检测等过程。
其中,波束形成是指根据接收到的雷达信号相位和幅度信息,计算出最佳的波束指向和形状。
杂波抑制是指通过滤波器等方法,降低或消除雷达信号中的杂波干扰。
目标检测是指根据雷达信号的特征参数,识别和跟踪目标。
(二)天线阵列设计天线阵列设计是相控阵天气雷达的另一个关键技术,它的好坏直接影响到雷达系统的灵敏度和方向性。
天线阵列一般由多个天线单元组成,每个天线单元都有自己的发射和接收功能。
天线单元之间的相对位置和相对幅度可以决定阵列的方向性和波束形状。
合理设计天线阵列的相对位置和相对幅度,可以提高雷达系统的灵敏度和方向性。
对空雷达杂波抑制技术的研究【摘要】杂波抑制在雷达信号处理中起到了非常重要的作用,它的性能好坏能够直接影响到信号处理机的整体性能。
由于对固定地物杂波有较理想抑制效果的对消器会带来盲速,本文引入盲速消除方法是采用多个重复频率参差工作,但是参差频率滤波器引起改善因子降低。
从而利用特征矢量法详细地推倒了要使改善因子最大,则MTI滤波器的权矢量应取输入杂波的自相关函数的最小特征值所对应的特征向量,基于这种改善因子最大准则得出最佳权MTI滤波器。
通过仿真,表明此最佳权MTI滤波器有较好的杂波抑制效果。
【关键词】杂波抑制;动目标显示;盲速;参差滤波器;改善因子1.引言雷达的基本任务是用无线电的方法探测目标的距离、方位角、俯仰角及速度等信息。
这些信息是利用目标对电磁波的反射现象获取的[1]。
对空雷达探测的目标通常是运动的物体,例如空中的飞机、导弹等,雷达接收到这些目标回波信息的时候,还会接收到各种背景(例如地物、云雨及海浪等)的干扰回波信号。
这些背景回波会给我们探测真正的目标带来困难,称之为杂波或无源干扰。
雷达接收到的不仅仅是目标回波,往往包含某些杂波干扰。
杂波干扰和目标回波在雷达显示器上同时显示很难观察到目标,特别是有强杂波时,能够使接收机过载,更难发现目标。
即使终端通过自动检测和数据处理系统,由于存在大量的杂波,系统也很难以处理。
文献[2]-[6]中都是对固定权的对消器做了一些研究,本文是在此基础上研究了最佳权参差频率滤波器,具有比对消器更好的抑制效果。
2.K次对消器K脉冲MTI对消器与滤波器加权系数为二项式的横向FIR滤波器等效。
通过级联一次MTI对消器来得到高阶滤波器的方法推导出K次MTI对消器,因此,K次MTI对消器的传递函数[7]为:(1)图1 K对消器构造模型图1为K次对消器构造模型,则K次对消器的输出为:(2)式中,K为对消器的次数,对消器的系数为二项式系数,用下式计算:(3)式中图2是四脉冲对消器的速度响应特性,其中雷达脉冲重复频率为330Hz,雷达工作波长为0.2m,则求得第一盲速为vr1=36.3m/s。
基于mti滤波器的杂波抑制方法研究引言:雷达是一种重要的传感器技术,广泛应用于军事、航空、导航、气象等领域。
然而,雷达系统在接收到回波信号时,常常会受到不同来源的杂波干扰,降低了信号的可靠性和分辨能力。
在雷达信号处理中,MTI(Moving Target Indication)滤波器是一种有效的方法,用于抑制杂波干扰并提取运动目标的回波信号。
本文将对基于MTI滤波器的杂波抑制方法进行研究。
一、MTI滤波器的原理MTI滤波器属于一类时域滤波器,通过基于回波信号的时间差异来抑制静止目标的回波信号。
其基本原理是通过跟踪不同时刻接收到的回波信号之间的相位差异来确定信号的运动状态,从而抑制静止目标的回波信号。
MTI滤波器通常由两个时延相等的通道组成:一个通道接收同一时刻的回波信号,另一个通道接收上一时刻的回波信号。
这样,在两个通道的输出信号相减之后,即可得到运动目标的回波信号。
二、MTI滤波器的设计方法1.多脉冲处理MTI滤波器的设计中,常常采用多脉冲处理的方法,即通过多次脉冲发射和接收,结合时域积分技术实现对杂波的抑制。
多脉冲处理可以通过累积多次回波信号来提高信噪比,并且可以利用多脉冲之间的时差信息来判断目标的运动状态。
2.速度匹配滤波器速度匹配滤波器是MTI滤波器的关键组成部分,用于通过速度匹配来提取目标的回波信号。
速度匹配滤波器通常由多个谐振腔组成,每个腔体对应一种速度。
当目标的速度与腔体的谐振频率匹配时,腔体将增加谐振放大,从而对目标回波信号进行增强,进一步抑制杂波干扰。
3.对抗运动目标方向MTI滤波器对抗杂波的状态还需要通过脉冲序列设计来实现。
通过将不同方向的脉冲序列相加,可以抑制掉固定目标的回波信号,从而进一步提高对运动目标的检测性能。
三、MTI滤波器的优缺点1.优点:(1)能够有效抑制静止目标的回波信号,提取运动目标的回波信息;(2)能够通过多脉冲处理和速度匹配滤波器来提高信噪比,提高抗干扰能力;(3)结构简单,易于实现。
机载海面监视雷达海杂波抑制技术研究进展发布时间:2023-01-31T06:13:48.378Z 来源:《中国科技信息》2022年第18期作者:袁汉钦[导读] 机载海面监视雷达系统作为机载平台对海探测的主要任务载荷袁汉钦海装驻合肥地区军事代表室安徽省合肥市 230001摘要:机载海面监视雷达系统作为机载平台对海探测的主要任务载荷,具有全天候、全天时、探测范围广和工作环境复杂多变等特点,是极具应用前景的一种雷达系统,在海上作战体系中占有重要地位。
海杂波是雷达杂波中最为复杂的一种形式,对机载海面监视雷达工作性能影响非常严重,所以通过对海杂波特性的研究,来抑制海杂波对雷达的影响在雷达海面目标检测等方面有着不可替代的作用。
本文首先阐述抑制海杂波研究意义,然后对国内外海杂波抑制研究现状进行综述。
?关键词:机载,海面监视雷达,海杂波1. 引言海杂波抑制技术一直是国内外雷达目标探测领域中的至关重要的课题。
深入研究海杂波特性和海面目标特性,提升海杂波抑制能力,开发适应复杂海战场环境的雷达对海目标检测技术对提升对海探测能力具有非凡意义[1-2]。
2. 海杂波抑制难点对海雷达采用持续搜索和监视工作模式,其覆盖区域广、工作时间长,而且海域种类多样,存在级海况。
在对各种视角下海上和低空目标进行搜素、检测与跟踪时,其目标检测困难主要源于两方面:一是海杂波具有高功率、时变性等复杂特性,同时近海和远海的海杂波特性截然不同;二是目标回波低功率、信杂比低,特别是小目标和慢速目标,使得目标回波在强海杂波背景下难以被检测。
海杂波定义为雷达电磁波照射到感兴趣区域时接收到的海表面后向散射回波[3-4]。
受海洋环境参数(风速、风向、涌浪、温度等)和雷达设备参数(擦地角、雷达波场、极化方式等)的影响,海杂波的物理机制和统计模型建立比较复杂,难以用简单的数学模型构建。
3. 海杂波抑制常手段3.1 提高雷达分辨率海面目标结构多为二面角、三面角反射体,如舰船、低空飞机,其主要电磁波散射点分布于目标的各种突出或非连续点,各种突出物与目标结构体本身的夹角将成为探测的强反射点,而目标结构体的侧面也将在一定的视角上产生强反射。
雷达抗干扰技术研究雷达是一种使用电磁波进行探测和测量的技术装置,被广泛应用于军事、民用领域。
在雷达应用过程中,由于存在各种外部因素和干扰源,会导致雷达的性能下降或甚至无法正常工作。
研究雷达抗干扰技术显得尤为重要。
我们需要了解什么是雷达抗干扰技术。
雷达抗干扰技术是指通过一系列的信号处理方法和硬件设计手段,对干扰信号进行抑制或削弱,从而提高雷达工作的性能。
具体而言,雷达抗干扰技术主要包括以下几个方面。
首先是信号处理方面的技术。
在雷达系统中,由于存在着各种类型的干扰信号,包括噪声、复杂多径反射、杂波等,因此需要对接收到的信号进行优化处理。
常用的信号处理方法有滤波、自适应预测滤波、数字复合滤波等。
这些方法可以有效地抑制干扰信号,提高雷达的抗干扰能力。
其次是硬件设计方面的技术。
雷达系统中的硬件部分对干扰具有一定的敏感性,因此需要对硬件进行优化设计,提高其工作的抗干扰能力。
可以通过增加接收机的带宽、提高功率放大器的线性度等手段来减小干扰信号对雷达系统的影响。
雷达抗干扰技术还包括对环境干扰的处理。
在实际应用中,雷达系统往往会受到来自自然环境以及其他雷达系统的干扰。
针对这些干扰,可以通过改进天线设计、减小雷达与其他设备之间的相互干扰等手段来提高雷达系统的抗干扰性能。
雷达抗干扰技术还需要考虑到系统的整体性能。
包括系统的稳定性、灵敏度、动态范围等多个指标。
而这些指标与抗干扰技术密切相关,需要在保证系统抗干扰性能的兼顾系统的其他性能指标。
雷达抗干扰技术是一门涉及信号处理、硬件设计和环境干扰处理等多个方面的技术。
通过采用适当的方法和手段,可以有效地抑制干扰信号,提高雷达系统的工作性能。
随着科技的不断发展和进步,雷达抗干扰技术也将不断得到改进和完善,使得雷达系统在各种复杂环境下都能够保持良好的工作状态。
复杂环境下机载相控阵雷达杂波和干扰抑制方法研究近年来,随着飞机的广泛应用,机载相控阵雷达在航空领域中起到了不可替代的作用。
然而,在复杂环境下,机载相控阵雷达面临着来自杂波和干扰的严重挑战。
因此,研究如何有效抑制杂波和干扰对于提升雷达性能至关重要。
首先,我们来了解一下机载相控阵雷达的原理。
相控阵雷达通过发射多个天线,实现对不同方位的目标进行探测和跟踪。
这些天线可以通过调整相位和振幅来形成波束,可以实现指向目标方向的探测和追踪。
相比传统雷达,机载相控阵雷达具有波束指向灵活、目标探测和跟踪能力强等优势。
然而,在复杂环境下,机载相控阵雷达面临着来自杂波和干扰的困扰。
杂波是由雷达系统自身所产生的无用信号,它会占据雷达接收机的动态范围,从而降低了雷达对目标的探测能力。
干扰则是来自外部的干扰源,会引入额外的噪声和误报警,干扰雷达系统的正常工作。
因此,如何有效抑制杂波和干扰成为了目前研究的热点。
针对杂波抑制,目前主要采用的方法包括压制杂波波束和干扰消除技术。
压制杂波波束技术通过采用适当的波束形成算法,将主波束的能量集中在目标方向上,从而减小杂波的干扰。
干扰消除技术则通过建立杂波功率模型,对杂波进行估计和消除。
这些方法可以有效地抑制杂波的干扰,提升雷达的探测性能。
对于干扰抑制,常用的方法包括滤波和波形处理。
滤波是一种基于信号处理的方法,通过对接收到的信号进行滤波处理,从而去除或减小干扰信号;波形处理则是通过改变相控阵雷达的波形特性,使其与干扰信号不匹配,从而实现对干扰的抑制。
这些方法可以有效降低干扰信号的影响,提高雷达的工作可靠性。
另外,还可以利用自适应信号处理技术来抑制杂波和干扰。
自适应信号处理是一种通过对接收到的信号进行动态调整的方法,可以根据实时情况对信号进行优化处理。
具体而言,可以利用自适应波束形成算法,对接收到的信号进行动态波束调整,实现对杂波和干扰的抑制。
此外,自适应滤波算法也可以根据接收到的信号特性,实现对杂波和干扰的消除。
雷达杂波抑制关键技术研究
摘要:针对防空系统雷达强杂波背景下雷达弱小目标检测问题,在分析传统杂
波抑制存在的问题的基础上,梳理了杂波图CFAR检测、检测跟踪联合处理、智
能杂波抑制等关键技术,并简要分析其原理及技术途径,并对雷达杂波抑制技术
发展趋势进行分析。
关键词:强杂波;CFAR;目标检测
1 引言
基于雷达信息的探测感知是现代信息化战争中武器装备的核心关键能力,随着低空突防、隐身突防、电磁干扰手段的普遍使用,造成雷达探测感知能力的急剧下降,进而导致防空武
器系统的作战效能严重下降。
雷达通过向目标辐射电磁波,然后接收从目标反射回来的电磁
波信号,再通过先进的信号处理技术,将有用目标信号从杂波和干扰中提取处理,进而完成
目标检测、位置估计、分类识别等功能。
巡航导弹等低空目标可通过超低空自主飞行,利用
地球曲率限制或复杂的地理环境实施攻击,雷达对其进行探测时,面临严重的地海杂波问题,为保证武器系统对低空目标的有效作战能力,必须解决强杂波背景下低小慢目标探测问题。
2 强杂波背景下目标检测面临的问题
当前,雷达探测面临复杂的地理环境,导引头下视探测以及地基雷达低空或下视探测时
不可避免会受到地理环境的制约以及地海杂波干扰。
这些背景杂波强度大,按照实际的测量
可得,幅度最强的地杂波可比系统内部的噪声大70 dB 以上。
另外由于地貌变换(如山区)、地表反射特性变化、离散强杂波点等使得杂波出现严重的非均匀/非平稳现象等,给杂波抑制等来严重挑战。
雷达杂波抑制技术经多年发展,目前常用的处理方法主要包括MTI、MTD、PD、STAP及
相应的改进设计等,同时也提出了多种目标检测方法,包括CA-CFAR、GO-CFAR、SO-CFAR、OS-CFAR等。
然而,由于当前雷达系统处理中环境的认知有限,杂波抑制滤波器的选择和设
计缺乏针对性,目标检测处理仍主要采取针对均匀平稳杂波的方法,多数情况下不满足实际
情况,使得杂波剩余较强,目标检测困难。
3 杂波抑制主要关键技术
3.1 杂波图CFAR检测技术
利用恒虚警检测[1]方法,对杂波背景功率的估计大致有两类,一类是空域检测技术,也
称为距离恒虚警检测技术,它将邻近参考单元处理器的输出均值作为检测门限的背景值,主
要应用在杂波分布比较均匀的雷达杂波背景中。
另一类是时域检测技术,即杂波图CFAR 检
测技术[2],它是依据前面若干次天线扫描的值得到的杂波背景功率来对检测单元进行检测,
在均匀或者非均匀的雷达杂波背景中都可以稳定工作。
通常,杂波强度在方位/距离上有剧烈的变化,在同一距离单元随时间变化相对平缓,空域检测中的恒虚警检测方法仅能通过减小
参考单元的个数,来减小虚警率的损失,这样却会导致虚警率无法保持恒定。
因此,为了改
善目标的检测性能,必须找到更好的检测方法。
杂波图CFAR 检测方法恰好可以解决这个问题,其存储在每个检测单元的估计值,是依据当前及以前的多次扫描值,然后利用一定的递
归算法进行更新的。
海杂波的统计特性与地杂波和气象杂波不同,与雷达重复周期相比,海
浪的起伏比较平缓,因此海杂波在邻近的脉冲间有较强的相关性,进行脉间积累检测时,性
能并不理想。
在空域中,海杂波的统计特性变化非常剧烈,而在时域中,变化相对平缓。
因此,可以利用杂波图CFAR 检测方法来改善目标的检测性能。
杂波图一般根据距离单元/方位的方式进行建立,可分为静态杂波图与动态杂波图两大类。
静态杂波图是在雷达建站时就建立起的雷达探测区域的幅度杂波图,其杂波数据可以存储在
可擦除可编程的只读存储器中,雷达运行时,杂波图的信息不随天线的扫描而发生变化,可
用来形成接收机增益控制图和杂波轮廓图。
而动态杂波图可随着雷达天线的扫描,自动将杂
波信息实时更新,可形成实时杂波区轮廓图,也可用于形成杂波图CFAR检测门限,还可将
杂波强度数据存入静态杂波图的存储空间可以自动形成静态杂波图。
3.2 检测跟踪联合处理技术
与传统检测后跟踪技术(Detect-Before-Track,DBT)[3]不同的是检测前跟踪(Track-Before-Detect,TBD)[4]不再对单帧的数据进行检测或者说是用一个比较低的门限,在目标
的跟踪阶段使用的是雷达的原始目标回波数据,这些原始目标回波数据中包含不但有目标的
幅度信息还有相位信息。
因为不像检测后跟踪那样直接对单帧的雷达回波数据进行过门限检
测和多帧结果的关联处理,检测前跟踪技术通过对多帧雷达数据的联合处理来完成目标的能
量积累,之后对积累之后的结果进行检测和判断,同时报出目标的航迹信息。
图 TBD处理流程框图
3.3 智能杂波抑制技术
智能杂波抑制技术,即基于人工智能理论,通过不断的知识积累和学习,形成杂波环境
的先验知识,结合先进的数字阵列雷达多波束灵活发射技术,提高对杂波的抑制性能和复杂
杂波环境下的动目标检测性能。
其主要工作过程为:雷达先发射信息到环境中,进而学习并
与环境产生信息交互,结合其它传感器或是从自身回波中得到先验信息和推理过程,在先验
信息已知的前提下,雷达系统进行发射和接收优化设计实现杂波抑制[5]。
其中雷达先验信息
主要包括:一是雷达杂波及目标回波特性,依赖杂波模型精确建立及操作人员战前实地采集,然后构建数据库;二是雷达配置、发射波形、极化特性、地理环境等信息。
该技术具有知识辅助信号处理和发射自适应处理两大特征,主要技术途径包括环境感知
和参数化表征技术、杂波滤除技术、波形最优化技术、杂波环境下雷达自适应目标检测和跟
踪技术等。
4 结论
强杂波背景下,目标检测的关键是对强杂波进行有效抑制,传统的MTI、MTD、PD、CFAR等方法杂波抑制能力有限,已经难以满足低空及下视雷达对强地海杂波背景下弱小目标的检测。
针对这一问题,研究人员提出了同时也提出了杂波图CFAR检测技术、检测跟踪联
合处理技术、智能杂波抑制技术等多种方法,可有效提升强杂波抑制能力。
随着人工智能及
雷达技术的快速发展,智能杂波抑制技术将大大提升雷达在强杂波背景下的目标检测能力,
将成为未来雷达杂波抑制的重要手段。
参考文献:
[1]赵树杰. 信号检测与估计理论[M]. 北京:电子工业出版社,2013.
[2]宋俊福. 基于杂波图和变换域的恒虚警率处理[D]. 大连海事大学,2013.
[3]何友,修建娟,张晶炜,等. 雷达数据处理及应用[M]. 北京:电子工业出版社,2006,1-267.
[4]C. Yang,L. Kong,X. Yang. A modified DPA for weak target detection via HPRF Radar[C]. 2011 IEEE CIE international Conterence on Radar,Piscataway,UK,2011,1737-1740.
[5]Gini F,Rangaswamy M. Knowledge based radar detection,tracking and classification[M]. John Wiley & Sons,2008.。