7-隔振、测振仪表、阻尼做功
- 格式:ppt
- 大小:204.00 KB
- 文档页数:21
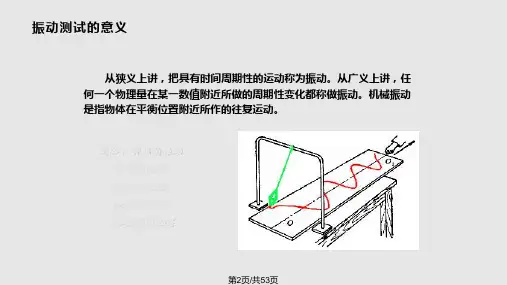
隔振器动力学参数相关测试技术在隔振器的设计与使用过程中,针对隔振器的阻尼系数以及刚度系数等动力学参数类型进行科学合理的测试,以最终确定隔振器在使用过程中的具体使用性能以及使用标准,是隔振器在设计检测过程中必须着重考虑的问题。
然而在以往的隔振器阻尼系数以及刚度系数的测量检测过程中,针对隔振器相关动力学参数的测试却存在着工艺流程较为繁复、测试结果不够标准的问题,对于隔振器设备的动力学参数测试结果和最终应用范围造成了较为不利的影响。
文章将以大阻尼粘性流体微振动隔震器为具体的测试类型,在以往隔振器阻尼系数以及刚度系数测试技术的基础上,提出一种新型的隔振器多参数模型阻尼系数以及刚度系数测试方法,并将最终的阻尼系数以及刚度系数数据进行仿真实验与隔振器的迟滞环法动力学参数测试结果进行比较,验证两种测试方法的结果误差,评论两种方法的具体隔振器动力学参数测试过程中的优异性。
标签:隔振器;动力学参数;多参数模型;迟滞环法;测试结果隔振器为机器设备与机器基础提供连接功能的弹性元件,能够有效的减少设备在运动过程中传递到机器基础以及机器基础传递到机器设备上的振动力,因此广泛的适用于与航天、航空、国防、汽车等诸多领域。
以隔振器在航天领域中的应用为例,一般来说航天器建设使用过程中的振动控制方法包括吸振、阻振以及隔振三种类型,而隔振器结构在航天器飞行使用过程中能够有效的减少航天器本体结构上的高频扰动震动能量传递,对保证航天器飞行过程中的稳定性有着非常重要的意义。
值得注意的是,隔振器虽然在航天器结构中的应用具备非常重要的作用,但是当前阶段针对隔振器使用过程中的阻尼系数以及刚度系数等动力学参数在具体的测试方法中却一直存在着测试流程较为复杂、测试结果精度较低的现象,对于隔振器性能的精确设计和使用造成了一定的影响。
1 隔振器动力学参数的传统测试方法针对隔振器动力学参数的传统测试方法,主要是根据隔振器结构使用过程中的内在隔震原理,采取实验机械阻抗曲线拟合获取方法来完成对隔振器结构阻尼系数以及刚度系数的测试工作,但是值得注意的是实验机械阻抗曲线拟合获取方法只能针对隔振器动力学参数中的阻尼以及刚度数值进行单一的验算,在具体验算的过程中没有充分的考虑到粘性流体的阻尼和刚度会随着振动频率的变化而出现变化,进而对振动器的隔震性能产生影响这一状况。

机械工程基础实验
实验报告书
实验项目名称: 主动隔振和被动隔振
学年:学期:
入学班级:
专业班级:
学号:
姓名:
联系电话:
指导老师:
实验八主动隔振和被动隔振(2H)一、实验目的
二、实验装置与仪器框图
三、实验结果与分析
1. 主动隔振 1) 实验数据
表 1
2) 根据主动隔振方法1)按公式(2)、(4)计算出隔振系数a η和隔振效率a ε。
3)根据主动隔振方法2)按公式(3)、(4)计算出隔振系数a η和隔振效率a ε
4)对两种结果进行对比分析
2. 被动隔振 1)实验数据
隔振系统固有频率0f =( )Hz
表 2
(注:本表一定要包含1λ=的两个点)
2)根据表2绘制λη-p 曲线和λε-p 曲线(要求用坐标纸绘制)。
竭诚为您提供优质文档/双击可除阻尼运动实验报告篇一:《阻尼振动与受迫振动》实验报告《阻尼振动与受迫振动》实验报告工程物理系核41崔迎欢20XX011787一.实验名称:阻尼振动与受迫振动二.实验目的1.观测阻尼振动,学习测量振动系统基本参数的方法;2.研究受迫振动的幅频特性和相频特性,观察共振现象;3.观测不同阻尼对受迫振动的影响。
三..实验原理1.有粘滞阻尼的阻尼振动弹簧和摆轮组成一振动系统,设摆轮转动惯量为J,粘滞阻尼的阻尼力矩大小定义为角速度dθ/dt与阻尼力矩系数γ的乘积,弹簧劲度系数为k,弹簧的反抗力矩为-kθ。
忽略弹簧的等效转动惯量,可得转角θ的运动方程为d2?d?J2k??0dtdt记ω0为无阻尼时自由振动的固有角频率,其值为ω0k/J,定义阻尼系数β=γ/(2J),则上式可以化为:d2?d??2??k??02dtdt2小阻尼即?2??0?0时,阻尼振动运动方程的解为??tiexp(??t)cos??i(*)?由上式可知,阻尼振动角频率为?d?阻尼振动周期为Td?2?2.周期外力矩作用下受迫振动的解在周期外力矩mcosωt激励下的运动方程和方程的通解分别为dd2?d?J2k??mcos?tdtdt??tiexp???t?cos??i??mcos??t?这可以看作是状态(*)式的阻尼振动和频率同激励源频率的简谐振动的叠加。
一般t>>τ后,就有稳态解??tmcos??t稳态解的振幅和相位差分别为?m???arctan2??22?0??其中,φ的取值范围为(0,π),反映摆轮振动总是滞后于激励源支座的振动。
3.电机运动时的受迫振动运动方程和解弹簧支座的偏转角的一阶近似式可以写成??tmcos?t式中αm是摇杆摆幅。
由于弹簧的支座在运动,运动支座是激励源。
弹簧总转角为t?mcos?t。
于是在固定坐标系中摆轮转角θ的运动方程为d2?d?J2k?mcos?t??0dtdt也可以写成d2?d?J2k??k?mcos?tdtdt于是得到2?m?由θm的极大值条件??m0可知,当外激励角频率??m有极大值系统发生共振,θ?,称为阻尼比。
5外力作用下的振动一、阻尼振动1.固有频率:简谐运动的物体受到的回复力是振动系统内部的相互作用力.如果振动系统不受外力的作用,此时系统的振动叫做固有振动,其振动频率称为固有频率.2.阻尼振动:振动系统受到的阻力作用叫做阻尼.阻尼振动的振幅不断减小.振动系统受到的阻尼越大,振幅减小得越快.当阻尼很小时,就可以忽略,当成简谐运动来处理.实际的振动过程总是存在阻力的,系统的能量必然会损失.例如弹簧振子和单摆在振动过程中,振子和摆球要克服阻力做功,系统的机械能不断减小,振幅也不断减小,直到振动停止.这种振动就是阻尼振动.如图所示是汽车车轮上的减震器,你知道它的作用吗?提示:汽车在凹凸不平的路上行驶时,会发生剧烈振动,安装大阻尼的减震器,可以使振动很快停下来.二、受迫振动与共振1.受迫振动:系统在周期性变化的驱动力作用下的振动叫做受迫振动.受迫振动稳定时,系统振动的频率等于驱动力的频率,与系统的固有频率无关.2.共振:驱动力的频率等于物体的固有频率.此时受迫振动的振幅最大.3.共振曲线:如图所示,共振曲线的横坐标为驱动力的频率,纵坐标为受迫振动物体的振幅.共振曲线直观地反映出了驱动力的频率对受迫振动物体振幅的影响,由共振曲线可知,当驱动力的频率与物体的固有频率相等时,受迫振动的振幅最大.18世纪中叶,法国昂热市一座102米长的大桥上有一队士兵经过.当他们在指挥官的口令下迈着整齐的步伐过桥时,桥梁突然断裂,造成226名官兵和行人丧生.你知道这是什么原因造成的吗?提示:是共振造成的.因为大队士兵迈步的频率正好与大桥的固有频率一致,使桥体的振动加强,当它的振幅达到甚至超过桥梁的抗压力时,桥就断了.类似的事件在俄国和美国等地也有发生.鉴于成队士兵步伐整齐地走过桥时容易造成桥的共振,所以后来各国都规定大队人马过桥,要便步通过.考点一阻尼振动1.固有频率如果振动系统不受外力的作用,此时的振动叫做固有振动,其振动频率称为固有频率.物体振动的固有频率由振动系统本身决定.2.阻尼振动振动系统克服摩擦力或其他阻力做功,消耗自身的机械能,因而振幅逐渐减小,最后停下来.这种振幅逐渐减小的振动叫做阻尼振动.振幅减小的快慢跟振动所受的阻尼有关,阻尼越大,振幅减小得越快.当阻尼很小时,在一段不太长的时间内振幅没有明显的减小,可以认为是等幅振动.物体做无阻尼振动,并不一定指它不受阻尼,而是指它在振动过程中保持振幅不变.3.阻尼振动的图象阻尼振动的图象如下图所示.物体做阻尼振动时,振幅越来越小.周期未变化,所以阻尼振动的频率不变.振动的频率由振动系统自身结构特点决定,并不会随振幅的减小而变化.【例1】(多选)如图所示是单摆做阻尼振动的振动图线,下列说法中正确的是()A.摆球A时刻的动能等于B时刻的动能B.摆球A时刻的势能等于B时刻的势能C.摆球A时刻的机械能等于B时刻的机械能D.摆球A时刻的机械能大于B时刻的机械能【导思】1。