想转向传动比的汽车线控转向控制算法
- 格式:pdf
- 大小:604.85 KB
- 文档页数:9

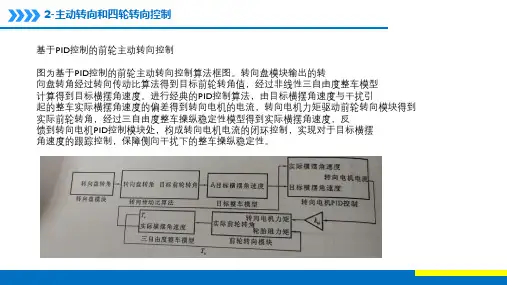
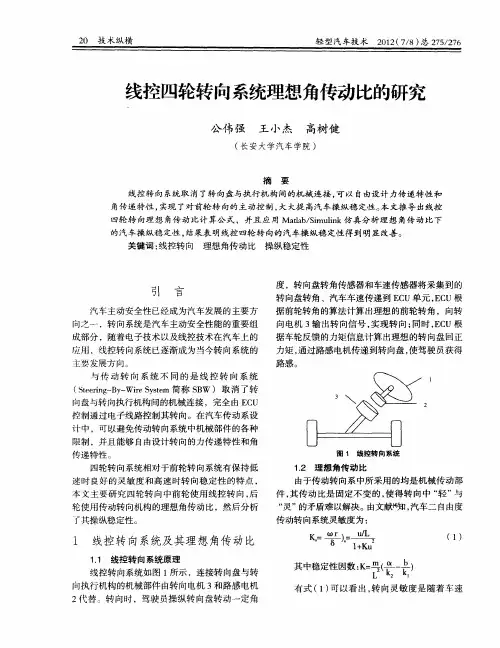
第37卷 第6期吉林大学学报(工学版)Vol.37 No.62007年11月Journal o f Jilin U niv ersity (Engineering and T echnolo gy Edition)Nov.2007收稿日期:2006 12 13.基金项目:国家自然科学基金资助项目(50475009); 863 国家高技术研究发展计划项目(2006AA 119192).作者简介:郑宏宇(1980 ),男,博士研究生.研究方向:汽车动态仿真与控制.E mail:zhy _jlu@163.co m 通讯联系人:宗长富(1962 ),男,教授,博士生导师.研究方向:汽车动态仿真与控制.E mail:zong.chang fu@基于理想转向传动比的汽车线控转向控制算法郑宏宇1,宗长富1,田承伟1,朱天军1,董义亮2,袁登木2(1.吉林大学汽车动态模拟国家重点实验室,长春130022; 2.长安股份有限公司汽车工程研究院,重庆401120)摘 要:以29自由度汽车动力学模型为基础,提出了保证汽车转向增益不变的理想传动比稳态控制策略,使线控转向汽车转向特性不受车速和方向盘转角变化的影响;提出了基于状态反馈的动态校正稳定性控制算法。
仿真和驾驶模拟器实验表明,基于理想转向传动比的稳态控制策略保证了汽车转向增益不变,减轻了驾驶员的负担,适合于更多的驾驶人群;基于状态反馈的动态校正稳定性控制算法有效提高了汽车的稳定性。
关键词:车辆工程;线控转向;转向传动比;稳态控制;稳定性控制中图分类号:U 463.4 文献标识码:A 文章编号:1671 5497(2007)06 1229 07Control algorithm for steer by wire system with ideal steering ratioZheng H ong yu 1,Zo ng Chang fu 1,Tian Cheng w ei 1,Zhu T ian jun 1,Do ng Yi liang 2,Yuan Deng m u 2(1.State K ey L abor atory ofA utomobile D y namics Simulation ,J ilin Univer sity ,Changchun 130022,China;2.I nstitute of A utomotiv e Engineer ing ,Chang an A utomobile H olding L td.,Chong qing 401120,China)Abstract:Based on a 29DOF v ehicle dynamic mo del,a steady state control strategy fo r the ideal steering ratio w as intr oduced to keep the vehicle steering g ain constant and make the steering character istic o f the steer by w ire sy stem not change w ith the vehicle speed and the steering angle;A stability control alg orithm w as proposed to correct the steering angle dynam ically based on the vehicle state feedback.The results of the simulatio n and the test in a driving simulator show ed that the introduced strateg y does keep the v ehicle steering g ain constant to reduce the driver bur den,allow ing the unskilled driver to steer the vehicle.The propo sed stability contro l algo rithm based on the vehicle state feedback improves effectively the vehicle stability.Key words:vehicle eng ineering;steering by wire;steer ratio;steady state control;stability control 目前汽车转向系统仍处于机械传动阶段,由于转向的角传动比固定,汽车转向特性随着车速和侧向加速度变化呈强非线性时变特性[1]。
基于carsim的线控转向汽车理想传动比的设计研究基于carsim的线控转向汽车理想传动比的设计研究随着科技的不断发展,汽车技术不断提高,轮胎、悬挂、转向系统等等都在不断得到改进和优化。
而作为汽车动力传递和调节的关键部件,传动比一直是大家关注的热点。
那么,如何设计一款合适的理想传动比的线控转向汽车呢?本文将从设计步骤、Carsim模拟和结论展开讲述。
一、设计步骤1. 确定基本参数:车辆质量、前悬长度、后悬长度、重心高度等;2. 设计目标:使车辆转向更稳定、行驶更平稳、提高燃油经济性;3. 根据车辆的动力学特性,确定合适的理想传动比范围;4. 利用Carsim工具开展模拟,观察各种理想传动比条件下车辆行驶情况。
二、Carsim模拟1. 点击Carsim工具栏,选择“New Vehicle”来创建汽车模型;2. 设定车辆的基本参数,输入电机参数和电池低电量限制;3. 在Carsim的“Pull-Down”菜单中,选择“Models”来添加转向模型;4. 设计转向系统的几何参数、弹簧和阻尼特征;5. 选择“Workshop”来导入仿真数据;6. 进行仿真并观察结果,选择理想传动比数据点。
三、结论在Carsim模拟的过程中,我们发现了一个问题,即在理想传动比设计过小或过大时,车辆的驾驶性能会出现问题。
因此,我们调整了传动比的大小,使其处于合适的范围内。
经过反复尝试和仿真,我们得到了一个合适的信任区间,并且在此区间内,汽车的性能表现会更稳定和优化。
总之,线控转向汽车理想传动比的设计研究是汽车制造行业不可忽视的部分。
Carsim模拟是一种有效的方法来帮助我们找到合适的理想传动比,这可以提高汽车的性能和安全性。
后续的研究将需要更多的实验和数据统计,以进一步推进汽车技术的创新和发展。
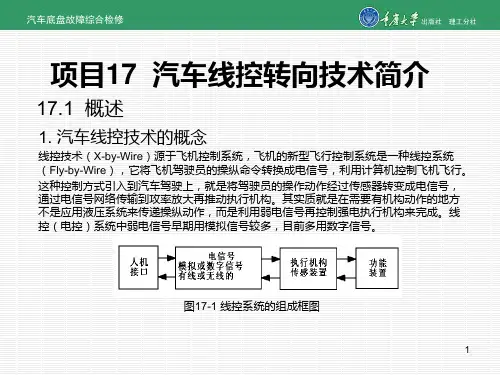
线控转向算法一、背景随着汽车技术的进步和自动驾驶的发展,人们对于汽车操控的要求越来越高。
传统的机械式转向系统已经不能满足人们的需求,因此,线控转向算法应运而生。
二、原理线控转向算法基于传感器和控制系统,通过感知车辆的运动状态和环境信息,实现对转向系统的精确控制。
具体来说,线控转向算法包括以下几个方面的内容:1. 传感器数据采集:线控转向系统通过安装在车辆上的传感器,如陀螺仪、加速度计等,采集车辆的运动数据,包括车辆的姿态、加速度、角速度等。
2. 数据处理与滤波:采集到的传感器数据需要经过处理和滤波,去除噪声和异常值,确保数据的准确性和可靠性。
3. 转向控制算法:线控转向算法根据传感器数据和预设的转向要求,计算出转向角度和转向速度,然后通过控制系统将计算结果传输给转向系统,实现对转向动作的精确控制。
4. 算法优化与自适应:线控转向算法需要不断进行优化和改进,以适应不同的驾驶场景和路况条件。
同时,算法还需要具备自适应能力,能够根据车辆的动态变化和驾驶者的操作习惯进行调整,以提供更好的操控性能和驾驶体验。
三、应用线控转向算法广泛应用于现代汽车中,为驾驶者提供更安全、稳定和舒适的驾驶体验。
具体应用包括以下几个方面:1. 车辆稳定性控制:线控转向算法可以通过对车辆姿态的实时监测和控制,提高车辆的稳定性。
在遇到急转弯、高速行驶或突发情况时,系统可以自动调整转向角度和转向速度,确保车辆的稳定性和安全性。
2. 自动驾驶功能:线控转向算法是实现自动驾驶的重要技术之一。
通过对传感器数据的处理和转向控制的精确计算,系统可以实现自动驾驶功能,提供更便捷和安全的驾驶体验。
3. 智能驾驶辅助:线控转向算法还可以与其他智能驾驶辅助系统结合,如自适应巡航控制、车道保持辅助等。
通过对车辆的转向动作进行精确控制,系统可以提供更舒适和便捷的驾驶辅助功能,减轻驾驶者的疲劳程度。
四、总结线控转向算法是一种基于传感器和控制系统的技术,用于控制汽车的转向动作。
汽车线控转向系统双向控制及变传动比特性研究一、本文概述随着汽车技术的飞速发展,线控转向系统(Steer-by-Wire, SbW)作为现代车辆的重要组成部分,正逐渐成为汽车转向技术的新趋势。
作为一种全新的转向方式,线控转向系统取消了传统的机械连接,通过电子信号传递驾驶员的转向意图,再由执行机构实现车辆的转向操作。
这种技术革新不仅提高了汽车的操控性能,还为车辆智能化、自动驾驶等高级功能的实现提供了可能。
本文《汽车线控转向系统双向控制及变传动比特性研究》旨在深入探索线控转向系统的双向控制策略以及变传动比特性。
双向控制策略指的是系统能够同时接收并响应驾驶员的转向输入和车辆的主动转向需求,实现更为精准和灵活的转向控制。
而变传动比特性则是指系统能够根据车辆行驶状态及驾驶员意图,动态调整转向传动比,以优化车辆的操控稳定性和行驶安全性。
本文将首先介绍线控转向系统的基本原理和组成结构,为后续研究奠定理论基础。
接着,将详细分析双向控制策略的实现原理及其在线控转向系统中的应用优势。
然后,将重点探讨变传动比特性的设计与优化方法,以及如何通过变传动比技术提升线控转向系统的综合性能。
本文将通过实验验证和仿真分析,评估双向控制策略和变传动比特性对车辆操控稳定性及行驶安全性的影响,为线控转向系统的进一步发展和优化提供理论支持和实践指导。
二、线控转向系统基本原理线控转向系统(Steer-by-Wire,简称SBW)是一种新型的转向系统,它取消了传统的机械转向器与转向柱之间的物理连接,通过电子信号传递驾驶员的转向意图给车辆,实现车辆的转向控制。
SBW系统主要由转向盘总成、转向执行机构和主控制器(ECU)等组成。
转向盘总成是驾驶员与SBW系统的交互界面,其上集成了转向力矩传感器、转角传感器等,用于检测驾驶员的转向力矩和转角等参数,并将这些信息转换为电信号传递给主控制器。
主控制器根据接收到的信号,结合车辆当前的速度、加速度等状态信息,计算出目标转向角度和转向力矩,并通过转向执行机构实现车辆的转向。
摘要线控转向系统变传动比特性及稳定性控制研究 线控转向系统是一种新兴的汽车转向系统。
与传统的机械转向系统不同,线控转向系统中转向盘和转向器之间没有刚性的机械连接,整个转向系统的机械部分只有转向盘模块和转向执行模块,且两模块间的信息传递完全由电信号取代,每个模块配有一个电机来提供动力输入。
转向执行模块的电机负责驱动转向轮,而转向盘模块的电机负责模拟机械转向系统中,路面传递给转向盘的路感力矩。
两模块间通过中央控制器进行电信号的传输,设定控制器中的控制算法来调控两个电机,进而实现整个线控转向系统的运转。
本文使用两两对比的方式,对线控转向系统的模型搭建,传动比设计和稳定性控制进行深入研究。
并将双向控制理论应用于线控转向系统的结构设计和建模思路上,最后采用无源控制中的波变量法,设计波变量控制器来保证系统的整体稳定性。
本文的主要工作内容如下:1.模型的建立及仿真验证本文采用Simulink与CarSim联合建模的方法对车辆模型建模。
设计了两种不同的建模思路,通过实验仿真对两种建模思路的优缺点进行对比分析。
最后选取了仿真效果更佳的方法,即通过设置CarSim中转向系统参数并采用三环PID控制器对转型执行电机进行控制的建模方法。
2.变角传动比设计本文对比了两种不同的变角传动比设计方法,分析了定增益法的不足,并依此改进了设计方法。
采用恒定车速定横摆角速度增益和转向灵敏度两个指标,对变角传动比进行设计。
并对随车速变化的角传动比和随小齿轮转角变化的角传动比分别设计拟合,最后给出整体的线控转向系统变角传动比特性。
3.线控转向系统双向控制结构和力传动比特性研究采用双向控制理论对线控转向系统结构进行设计,通过阅读大量文献对不同双向控制结构的线控转向系统进行对比分析,选取了应用广泛且结构简单的力反馈-位置型I线控转向系统双向控制结构,并依此结构进行力传动比特性的设计和整体模型的完善。
4.线控转向系统稳定性控制研究采用无源理论对线控转向系统的稳定性进行研究。
汽车线控转向系统自适应变增益传动比设计目录一、内容描述 (2)1.1 背景与意义 (2)1.2 国内外研究现状 (4)1.3 研究内容与方法 (5)二、汽车线控转向系统理论基础 (6)2.1 线控转向系统基本原理 (8)2.2 线控转向系统性能要求 (9)2.3 线控转向系统关键技术 (11)三、自适应变增益传动比设计理论 (12)3.1 变增益传动比控制原理 (14)3.2 自适应变增益传动比设计目标 (15)3.3 自适应变增益传动比设计方法 (15)四、基于PID控制的自适应变增益传动比设计 (17)4.1 PID控制器原理 (18)4.2 基于PID控制的自适应变增益传动比设计步骤 (19)4.3 PID控制器参数整定 (20)五、基于模糊控制的自适应变增益传动比设计 (21)5.1 模糊控制基本原理 (22)5.2 基于模糊控制的自适应变增益传动比设计步骤 (23)5.3 模糊控制器参数确定 (25)六、基于神经网络控制的自适应变增益传动比设计 (27)6.1 神经网络控制基本原理 (28)6.2 基于神经网络控制的自适应变增益传动比设计步骤 (29)6.3 神经网络控制器参数优化 (31)七、仿真分析与实际应用验证 (32)7.1 仿真分析方法 (32)7.2 实际应用案例 (33)7.3 结果分析 (35)八、结论与展望 (36)8.1 研究成果总结 (36)8.2 存在问题与不足 (37)8.3 未来研究方向 (38)一、内容描述随着科技的飞速发展,汽车行业正经历着前所未有的变革。
汽车线控转向系统(Wireless Steering System, WSS)作为一种创新的转向技术,正逐步取代传统的液压助力转向系统。
线控转向系统通过电子信号来操控转向装置,消除了机械连接,从而提高了车辆的操控性、节能性和安全性。
在此背景下,自适应变增益传动比设计成为了线控转向系统研究的热点之一。
这种设计能够根据车辆行驶的实时状态和驾驶员的转向意图,动态调整转向系统的传动比,以优化转向性能和减小对驾驶员的冲击。
基金项目:奥运用纯电动客车整车优化及制造项目(D0305002040111)收稿日期:2007-05-01 修回日期:2007-05-12第25卷 第8期计 算 机 仿 真2008年8月文章编号:1006-9348(2008)08-0268-03遗传算法优化线控转向系统角传动比的研究于蕾艳1,2,林 逸2,施国标2(1.中国石油大学机电工程学院,山东东营257061;2.北京理工大学机械与车辆工程学院,北京100081)摘要:线控转向系统取消了转向盘与转向轮的机械连接,可以根据车况灵活改变角传动比以提高汽车的操纵稳定性。
首先建立了线控转向系统的人-车-路闭环动力学模型,包括道路模型、驾驶员模型、二自由度整车模型。
然后研究了包括轨道误差总方差、方向误差指标、驾驶员转向负担三项指标的开环总方差。
最后利用遗传算法,以开环总方差为适应度函数,对不同车速下的传动比进行优化。
结果表明,各车速下的传动比使得开环总方差较小,提高了车道跟踪性能、方向稳定性能,降低了驾驶员的转向负荷,从而提高汽车的操纵稳定性。
关键词:线控转向;遗传算法;角传动比中图分类号:U270 11 文献标识码:AOpti m ization of Steer -by -W ire Syste m s SteeringR atio U si ng G enetic A l gorith mYU Le i-yan 1,2,LIN Y i 2,S H I Guo-b iao2(1.Co lleg e o fM echanical and E lectron ic Eng i neer i ng ,Ch i na U n i versity o f P etroleu m,D ongy i ng Shandong 257061,Ch i na ;2.Schoo l ofM echan i s m and V eh i c le Eng i neer i ng ,Be iji ng Institute of T echno logy ,Beiji ng 100081,Ch i na)AB STRACT :Stee r-by-W ire syste m cuts o ff the m echanical li nk bet w een stee ri ng w hee l and steered wheels ,so it can change steer i ng ra tio according to veh icle sta te to i m prove veh icle handli ng and stab ility .F i rst ,a dri ve r-vehic l e-road close loop dyna m ics m odel of Steer-by -W ire syste m inc l udi ng road m ode ,l dr i ver mode l and t wo degree of freedo m f u ll vehicle model is bu ilt .T hen the open l oop t o ta l variance i nc l udi ng trace erro r to tal va riance ,d irection error tota l var i ance and dri v er steer i ng load i s researched .F i na ll y t he steering ratios under d iffe rent veloc ities are op ti m ized w ith open loop t o ta l var i ance as fitness functi on us i ng geneti c a l go rith m.R esu lts s how tha t the opti m ized steer i ng rati o s can m ake the open loop total variance si gn ifi can tly s m all er ,i m prove l ane trace perfor m ance and d irec ti on stab ili ty perfor m ance ,and l owe r dr i ver s steer i ng load t hus i m prov i ng veh i c le handli ng and stab ilit y .K EY W ORDS :Steer-by -w ire (SB W );G enetic a l gor it hm ;Steer i ng ra ti o1 引言机械转向系统的角传动比是固定的,无法克服转向 轻 与 灵 的矛盾;而线控转向系统可以根据车况灵活改变角传动比,以提高汽车的操纵稳定性[1-4]。
基于线控变传动比的四轮转向汽车最优控制张庭芳;张超敏;何新毅;曲志林【摘要】To sufficiently utilize the advantages of Steer By Wire (SBW) which can customize the angle transmission ratio and the four-wheel steering (4WS) technology in improving the handle ability and stability of vehicles, this paper presents a method which combined with SBW of variable transmission ratio fuzzy controlling and the LQR optimal control for four wheel steering. By means of the Matlab/Simulink tool to simulate this method,and comparing with the methods scale control 4WS vehicle、the front-wheel steering (FWS) vehicle and fixed transmission ratio optimal control for four wheel steering with the same parameters. The results show that the method not only possess the good flexibility at low speed and steering stability at high speed ,but also can guarantee under the various conditions of sideslip angle is minimizing and the Yaw rate overshoot is decreased and the settling time is shorten in transient state, and keep in a relatively safe position.%为了充分发挥线控转向可以自由设计角传动比的特性和四轮转向技术在提高汽车操纵稳定性的优点,提出了基于线控转向模糊变传动比和采用LQR最优控制四轮转向相互结合的方法.利用Matlab/Simulink软件对该方法进行建模仿真,并与相同参数的前轮转向、定前后轮转向比四轮转向以及转向系定传动比最优控制四轮转向仿真对比,结果表明,该方法不仅实现了低速时具有较高的转向灵敏性和高速时具有较好的转向稳定性的理想转向特性,而且能够保证在各种工况下质心侧偏角基本为零和横摆角速度瞬态响应的超调量很少,稳定时间缩短,并处于一个相对安全的位置.【期刊名称】《机械设计与制造》【年(卷),期】2018(000)001【总页数】4页(P133-136)【关键词】线控转向;四轮转向;变传动比;最优控制;仿真【作者】张庭芳;张超敏;何新毅;曲志林【作者单位】南昌大学机电工程学院车辆工程研究所,江西南昌 330031;南昌大学机电工程学院车辆工程研究所,江西南昌 330031;南昌大学机电工程学院车辆工程研究所,江西南昌 330031;南昌大学机电工程学院车辆工程研究所,江西南昌330031【正文语种】中文【中图分类】TH161 引言目前汽车转向系统的研究热点由传统的前轮转向(FWS)逐渐转化为四轮转向(4WS)和线控转向(SBW),与前轮转向相比,四轮转向提高了转向操纵机动性和行驶稳定性[1];而线控转向由于取消了方向盘与转向执行机构的直接连接,具有可以自由设计转向系统的角传递特性和力传递特性的优点[2]。
电液主动转向器液压助力转向系统毕业设计(论文)任务书摘要摘要转向系统是控制汽车行驶路线和方向的重要装置,其性能直接影响到汽车的操纵性能和稳定性能。
主动前轮转向通过电机根据车速和行驶工况改变转向传动比。
电动液压助力转向系统采用电动机驱动液压助力系统油泵,具有能够根据汽车行驶工况实现助力程度自动控制、改善转向手感、节约能量消耗、安装布置方便等优点。
在国内外部分汽车上开始使用。
本文回顾了车辆转向系统的发展历程。
指出,相比线性控制转向,主动转向技术会成为今后发展的趋势。
我们以宝马轿车上选装的主动转向系统为例,详细介绍了主动转向系统的结构和组成、双行星齿轮机构工作原理及工作模式,以及该系统可传动稳定功能实现的原理和系统安全设计性设计。
并指出通过与其他动力学控制系统一起实现底盘一体化集成控制将是主动转向技术未来的发展方向。
关键词主动转向;液压助力转向系统;可变转向传动比AbstractAbstractSteering system is an important for lane changing control of wheeled vehicles. Its performance influences vehicle steer ability and stability directly. Active front steering varies the steering ratio electronically in direct relation to the speed and road conditions. Under normal road conditions at low and medium speeds, the steering becomes more direct, requiring less steering effort of the driver, increasing the car’s agility and drivability.The Electro-Hydraulic Power Steering system is designed to use hydraulic power steering pump which is forced by electric motor with advantage of attaining automatic controlling of assistance degree according to the steering operation, improving hand feeling, saving energy consumption, installing and so on. It has been used in some cars domestic and aboard.Retrospect the development course of vehicle steering system. Contrast to line control steering, the active steering technology is the main trend in the future. As an example, the structure and working modes of active front (AFS) system and its double planetary gear mechanism of a BMW car are presented. The implementation of variable gear ratio and vehicle stability control as well as system safety design are discussed in detail. It is pointed out that using the system, together with other dynamics control systems to realize integrated chassis control is the development trend of AFS technology in the future.Keywords Electro-Hydraulic Power Steering(EHPS); Active front steering;Variable steering ratio目录摘要 (I)Abstract ................................................................................................................ I I 第1章绪论.. (1)1.1课题背景 (1)1.2国内外文献综述 (1)1.2.1 国外研究现状 (1)1.2.2 国内研究现状 (3)1.3本文研究意义 (6)1.4主要研究内容 (6)1.5本章小结 (7)第2章动力转向和主动转向的发展史 (8)2.1汽车动力转向系统的发展 (8)2.1.1 液压助力转向系统 (8)2.1.2 电动助力转向系统 (8)2.1.3 电控液压助力转向系统 (9)2.1.4 线控转向系统 (12)2.2汽车主动转向系统 (13)2.2.1 主动转向分类 (14)2.2.2 主动转向控制技术 (14)2.3汽车主动转向系统支持技术 (15)2.3.1 车辆动力学 (15)2.3.2 控制理论在车辆主动转向系统中的应用 (16)2.4本章小结 (18)第3章主动前轮转向结构的设计方案 (19)3.1转向系统原理 (19)3.2液压助力系统原理 (22)3.3行星齿轮的主动前轮转向机构 (23)3.4本章小结 (26)第4章转向系统动力学计算 (27)4.1转向盘与扭杆动力学模型 (27)4.2转阀动态数学模型 (27)4.3转阀节流面积变化数学模型 (28)4.4液压动力缸的流量连续性方程 (29)4.5图形说明 (31)4.6本章小结 (32)结论 (34)参考文献 (35)致谢 (37)附录1 开题报告 (38)附录2 文献综述 (42)附录3 中文翻译 (45)附录4 英文文献 (49)第1章绪论第1章绪论1.1 课题背景从1886年第一辆汽车诞生至今已经100多年了,汽车这一被称为“改变世界的机器”,早已从价格昂贵的奢侈品变成了现代社会不可或缺的重要交通工具之一。
线控四轮转向系统理想角传动比的研究线控四轮转向系统理想角传动比的研究摘要:本文提出了线控四轮转向系统的理想角传动比的计算方法,通过建立数学模型,考虑车辆的不同属性,确定了传动比的最佳设计值,实现了线控四轮转向系统的优化控制。
实验结果表明,本文所提出的理想角传动比能够显著提高车辆的转向性能和稳定性。
关键词:线控四轮转向系统;理想角传动比;数学模型;优化控制1.引言随着社会经济发展和交通工具日益普及,车辆行驶安全和性能的提升已成为汽车工程研究的重要方向之一。
四轮转向技术是一种能够提高车辆转向性能和稳定性的关键技术,其应用已逐渐普及到大众车型中。
本文研究的对象为线控四轮转向系统,通过设计与优化控制,提高车辆的动态响应和稳态精度。
其中,理想角传动比是系统控制的核心问题。
因此,本文将重点探讨线控四轮转向系统的理想角传动比的研究。
2.线控四轮转向系统的理想角传动比2.1 理想角传动比的概念理想角传动比是指车轮在满足行驶过程中的各项指标要求下,使四个车轮的理想转向角一致的比值。
即根据车辆属性和运动学原理,通过决策车轮前后的转向角度比例,使得车辆具有最佳的动态响应和转向稳定性。
2.2 理想角传动比计算理想角传动比的计算涉及到车辆运动学及动力学模型的建立。
在车辆行驶过程中,车轮的转动可以看作是一个关于车体转动点的转动,而车体转动点在驾驶员操纵方向盘时的位置以及车轮的刹车加速度都会对车轮的转动角度产生影响。
因此,在计算理想角传动比时,需要考虑车体转动点的位置、前后轮胎的数据等多个因素。
计算过程中,需要首先对车辆的属性、重心高度以及悬挂系统进行分析,并建立起相应的数学模型。
通过求解数学方程组,确定车轮转动角的大小和比例,得到理想角传动比的最佳值。
3.优化控制理想角传动比的计算是线控四轮转向系统的核心问题。
但是,由于车辆行驶过程中的各种外界干扰、驾驶员的驾驶习惯等因素,实际传动比难以严格保持在理论值。
因此,需要通过优化控制来实现传动比的最优化控制。
线控转向算法
线控转向算法主要用于自动驾驶系统中的车道保持和车辆控制。
其思路是通过对车辆当前位置及其周围环境的分析,计算出最佳的路径或控制策略,使车辆保持在指定车道内或按照设定的路径行驶。
具体来说,在线控转向算法的实现过程中,需要先对车辆当前的位置和朝向进行测量,并通过传感器获取路面情况和周围环境信息,包括车道线、障碍物、交通信号等。
然后根据这些数据进行分析和处理,通过算法计算出实时的机动控制指令,如转向角度、速度等,从而控制车辆的行驶方向和速度。
常用的线控转向算法包括模型预测控制(MPC)、逆向说明控制(ISMC)和自适应控制等。
其中,MPC算法以车辆的物理模型为基础,考虑车辆的动态特性和环境变化,通过预测控制来实现车辆的最优控制。
ISMC算法则采用逆向控制思想,将控制系统视为一个反馈系统,通过对反馈误差进行处理,实现车辆的稳定转向和行驶。
总之,线控转向算法在自动驾驶系统中具有重要作用,能够实现车辆的高效控制和精准驾驶,提高行驶安全性和舒适性。