小波分析的实验报告四
- 格式:doc
- 大小:343.50 KB
- 文档页数:5
一、题目:细分曲面二、目的:用loop算法对曲面细分三、算法及其实现:Loop算法 Loop细分算法是Loop于1987年在其硕士论文中提出的一种逼近型三角形面分裂细分算法。
Loop模式采用1.4三角形分裂,只生成E.顶点和v-顶点,计算新顶点的几何规则如下:四、实现工具:Matlab五、程序代码:(1)test_loop.m% Test: Mesh subdivision using the Loop scheme.%% Author: Jesus Mena% Example: Boxvertices = [100 10 10; -10 100 10; 10 -100 10; -10 -10 10; 10 60 -10; -10 80 -10; 10 -30 -10; -10 -110 -10]';faces = [1 2 3; 4 3 2; 1 3 5; 7 5 3; 1 5 2; 6 2 5; 8 6 7; 5 7 6; 8 7 4; 3 4 7; 8 4 6; 2 6 4]';figure(1);subplot(1,4,1);plotMesh(vertices, faces);for i=2:4subplot(1,4,i);[vertices, faces] = loopSubdivision(vertices, faces);plotMesh(vertices, faces);end% Example: Tetrahedronvertices = [10 10 10; -100 10 -10; -100 -10 10; 10 -10 -10]';faces = [1 2 3; 1 3 4; 1 4 2; 4 3 2]';figure(2);subplot(1,4,1);plotMesh(vertices, faces);for i=2:4subplot(1,4,i);[vertices, faces] = loopSubdivision(vertices, faces);plotMesh(vertices, faces);end% Example: Cylindervertices = [0 -25 0; 0 5 0; 1 -5 0; 9.65 -5 2.58; 8.66 -5 5; 7.07 -5 7.07; 5 -5 8.66; 2.58 -5.8 9.65; 0 -5 1; -2.58 -5 9.65; -5.99 -5 8.66; -7.07 -5 7.07; -8.66 -15 5; -19.65 -5 2.58; -10 -5 0; -9.65 -5 -2.58; -8.66 -5 -5; -7.07 -5 -7.07; -5 -5 -8.66; -2.58 -5 -9.65; -0 -5 -10; 2.58 -5 -9.65; 5 -5 -8.66; 7.07 -5 -7.07; 8.66 -5 -5; 9.65 -5 -2.58; 10 5 0 ; 9.65 5 2.58; 8.66 5 5; 7.07 5 7.07; 5 5 8.66; 2.58 5 9.65; 0 5 10; -2.58 5 9.65; -5 5 8.66; -7.07 5 7.07; -8.66 5 5; -9.65 5 2.58; -10 5 0; -9.65 5 -2.58; -8.66 5 -5; -7.07 5 -7.07; -5 5 -8.66; -2.58 5 -9.65; -0 5 -10; 2.58 5 -9.65; 5 5 -8.66; 7.07 5 -7.07; 8.66 5 -5;9.65 5 -2.58]';faces = [1 3 4; 1 4 5; 1 5 6; 1 6 7; 1 7 8; 1 8 9; 1 9 10; 1 10 11; 1 11 12; 1 12 13; 1 13 14; 1 14 15;1 15 16; 1 16 17; 1 17 18; 1 18 19; 1 19 20; 1 20 21; 1 21 22; 1 22 23; 1 23 24; 1 24 25; 1 25 26; 1 26 3; 2 28 27; 2 29 28; 2 30 29; 2 31 30; 2 32 31; 2 33 32; 2 34 33; 2 35 34; 2 36 35; 2 37 36; 2 38 37; 2 39 38; 2 40 39; 2 41 40; 2 42 41; 2 43 42; 2 44 43; 2 45 44; 2 46 45; 2 47 46; 2 48 47; 2 49 48; 2 50 49; 2 27 50; 3 27 28; 3 28 4; 4 28 29; 4 29 5; 5 29 30; 5 30 6; 6 30 31; 6 31 7; 7 31 32; 7 32 8; 8 32 33; 8 33 9; 9 33 34; 9 34 10; 10 34 35; 10 35 11; 11 35 36; 11 36 12; 12 36 37; 12 37 13;13 37 38; 13 38 14; 14 38 39; 14 39 15; 15 39 40; 15 40 16; 16 40 41; 16 41 17; 17 41 42; 17 42 18; 18 42 43; 18 43 19; 19 43 44; 19 44 20; 20 44 45; 20 45 21; 21 45 46; 21 46 22; 22 46 47; 22 47 23; 23 47 48; 23 48 24; 24 48 49; 24 49 25; 25 49 50; 25 50 26; 26 50 27; 26 27 3]';figure(3);subplot(1,4,1);plotMesh(vertices, faces);for i=2:4subplot(1,4,i);[vertices, faces] = loopSubdivision(vertices, faces);plotMesh(vertices, faces);end% Example: Gridvertices = [-4 -40 0; -12 -4 0; 0 -14 0; 2 -04 0; 4 -4 0; -4 -20 0; -21 -26 0; 0 -2 0; 2 -2 0; 4 -2 0; -4 10 0; -2 10 0; 0 10 0; 2 0 20; 4 10 0; -4 2 0; -2 2 0; 20 2 0; 2 2 0; 4 2 0; -4 4 0; -2 4 0; 0 4 0; 2 4 0;4 4 0]';faces = [7 2 1; 1 6 7; 8 3 2; 2 7 8; 9 4 3; 3 8 9; 10 5 4; 4 9 10; 12 7 6; 6 11 12; 13 8 7; 7 12 13; 14 9 8; 8 13 14; 15 10 9; 9 14 15; 17 12 11; 11 16 17; 18 13 12; 12 17 18; 19 14 13; 13 18 19; 20 15 14;14 19 20; 22 17 16; 16 21 22; 23 18 17; 17 22 23; 24 19 18; 18 23 24; 25 20 19; 19 24 25]';figure(4);subplot(1,4,1);plotMesh(vertices, faces);for i=2:4subplot(1,4,i);[vertices, faces] = loopSubdivision(vertices, faces);plotMesh(vertices, faces);End(2)function plotMesh(vertices, faces)hold on;trimesh(faces', vertices(1,:), vertices(2,:), vertices(3,:));colormap gray(1);axis tight;axis square;axis off;view(3);End(3)function [newVertices, newFaces] = loopSubdivision(vertices, faces)% Mesh subdivision using the Loop scheme.%% Dimensions:% vertices: 3xnVertices% faces: 3xnFaces%% Author: Jesus Menaglobal edgeVertice;global newIndexOfVertices;newFaces = [];newVertices = vertices;nVertices = size(vertices,2);nFaces = size(faces,2);edgeVertice = zeros(nVertices, nVertices, 3);newIndexOfVertices = nV ertices;% ------------------------------------------------------------------------ %% create a matrix of edge-vertices and the new triangulation (newFaces).% computational complexity = O(3*nFaces)%% * edgeVertice(x,y,1): index of the new vertice between (x,y)% * edgeVertice(x,y,2): index of the first opposite vertex between (x,y) % * edgeVertice(x,y,3): index of the second opposite vertex between (x,y) %% 0riginal vertices: va, vb, vc, vd.% New vertices: vp, vq, vr.%% vb vb% / \ / \% / \ vp--vq% / \ / \ / \% va ----- vc -> va-- vr --vc% \ / \ /% \ / \ /% \ / \ /% vd vdfor i=1:nFaces[vaIndex, vbIndex, vcIndex] = deal(faces(1,i), faces(2,i), faces(3,i));vpIndex = addEdgeVertice(vaIndex, vbIndex, vcIndex);vqIndex = addEdgeVertice(vbIndex, vcIndex, vaIndex);vrIndex = addEdgeVertice(vaIndex, vcIndex, vbIndex);fourFaces = [vaIndex,vpIndex,vrIndex; vpIndex,vbIndex,vqIndex; vrIndex,vqIndex,vcIndex; vrIndex,vpIndex,vqIndex]';newFaces = [newFaces, fourFaces];end;% ------------------------------------------------------------------------ %% positions of the new verticesfor v1=1:nVertices-1for v2=v1:nVerticesvNIndex = edgeVertice(v1,v2,1);if (vNIndex~=0)vNOpposite1Index = edgeVertice(v1,v2,2);vNOpposite2Index = edgeVertice(v1,v2,3);if (vNOpposite2Index==0) % boundary casenewVertices(:,vNIndex) = 1/2*(vertices(:,v1)+vertices(:,v2));elsenewVertices(:,vNIndex) = 3/8*(vertices(:,v1)+vertices(:,v2)) + 1/8*(vertices(:,vNOpposite1Index)+vertices(:,vNOpposite2Index));end;end;end;end;% ------------------------------------------------------------------------ %% adjacent vertices (using edgeVertice)adjVertice{nVertices} = [];for v=1:nVerticesfor vTmp=1:nVerticesif (v<vTmp && edgeVertice(v,vTmp,1)~=0) || (v>vTmp && edgeVertice(vTmp,v,1)~=0)adjVertice{v}(end+1) = vTmp;end;end;end;% ------------------------------------------------------------------------ %% new positions of the original verticesfor v=1:nVerticesk = length(adjVertice{v});adjBoundaryVertices = [];for i=1:kvi = adjVertice{v}(i);if (vi>v) && (edgeVertice(v,vi,3)==0) || (vi<v) && (edgeVertice(vi,v,3)==0)adjBoundaryVertices(end+1) = vi;end;end;if (length(adjBoundaryVertices)==2) % boundary casenewVertices(:,v) = 6/8*vertices(:,v) + 1/8*sum(vertices(:,adjBoundaryVertices),2);elsebeta = 1/k*( 5/8 - (3/8 + 1/4*cos(2*pi/k))^2 );newVertices(:,v) = (1-k*beta)*vertices(:,v) + beta*sum(vertices(:,(adjVertice{v})),2);end;end;end% ---------------------------------------------------------------------------- %function vNIndex = addEdgeVertice(v1Index, v2Index, v3Index)global edgeVertice;global newIndexOfVertices;if (v1Index>v2Index) % setting: v1 <= v2vTmp = v1Index;v1Index = v2Index;v2Index = vTmp;end;if (edgeVertice(v1Index, v2Index, 1)==0) % new vertexnewIndexOfVertices = newIndexOfVertices+1;edgeVertice(v1Index, v2Index, 1) = newIndexOfVertices;edgeVertice(v1Index, v2Index, 2) = v3Index;elseedgeVertice(v1Index, v2Index, 3) = v3Index;end;vNIndex = edgeVertice(v1Index, v2Index, 1);return;end六、运行结果:七、结果分析:曲面的细分是徐徐逼近得到图形,并且更改坐标的数字,或更改曲面的顺序,所得到的图形是不同的。
小波分析实验报告
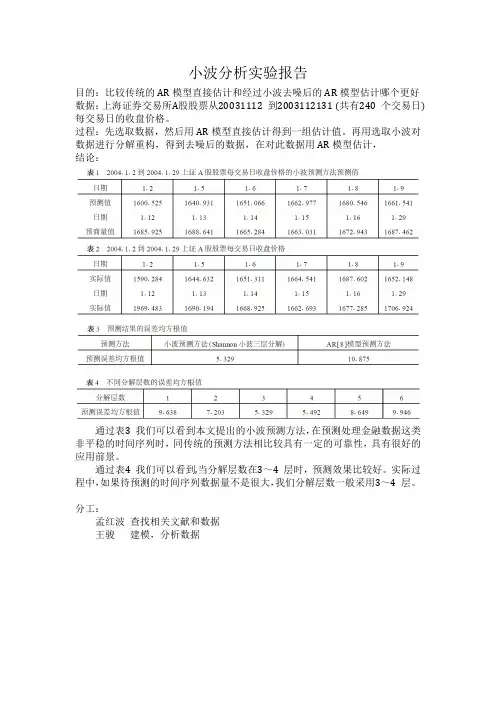
目的:比较传统的AR模型直接估计和经过小波去噪后的AR模型估计哪个更好数据:上海证券交易所A股股票从20031112 到2003112131 (共有240 个交易日) 每交易日的收盘价格。
过程:先选取数据,然后用AR模型直接估计得到一组估计值。
再用选取小波对数据进行分解重构,得到去噪后的数据,在对此数据用AR模型估计,
结论:
通过表3 我们可以看到本文提出的小波预测方法,在预测处理金融数据这类非平稳的时间序列时,同传统的预测方法相比较具有一定的可靠性,具有很好的应用前景。
通过表4 我们可以看到,当分解层数在3~4 层时,预测效果比较好。
实际过程中,如果待预测的时间序列数据量不是很大,我们分解层数一般采用3~4 层。
分工:
孟红波查找相关文献和数据
王骏建模,分析数据。
小波分析实验报告课程:小波分析姓名:学院:学号:一、实验目的:1、运用傅里叶变换知识对常用的基本函数做基本变换。
2、通过观察小波变换系数建立对小波变换及其有关性质的感性认识3、加深对因果滤波器的理解,并会判断因果滤波器的类型。
4、运用卷积公式对基本信号做滤波处理并作出分析,以加深理解。
5、熟悉Matlab中相关函数的用法。
二、实验原理:1、“小波”就是小区域、长度有限、均值为0的波形。
所谓“小”是指它具有衰减性;而称之为“波”则是指它的波动性,其振幅正负相间的震荡形式。
与Fourier变换相比,小波变换是时间(空间)频率的局部化分析,它通过伸缩平移运算对信号(函数)逐步进行多尺度细化,最终达到高频处时间细分,低频处频率细分,能自动适应时频信号分析的要求,从而可聚焦到信号的任意细节,解决了Fourier变换的困难问题,成为继Fourier变换以来在科学方法上的重大突破。
小波转换分成两个大类:离散小波变换(DWT)和连续小波转换(CWT)。
两者的主要区别在于,连续转换在所有可能的缩放和平移上操作,而离散转换采用所有缩放和平移值的特定子集。
小波变换的公式有内积形式和卷积形式,两种形式的实质都是一样的。
它要求的就是一个个小波分量的系数也就是“权”。
其直观意义就是首先用一个时窗最窄,频窗最宽的小波作为尺子去一步步地“量”信号,也就是去比较信号与小波的相似程度。
信号局部与小波越相似,则小波变换的值越大,否则越小。
当一步比较完成后,再将尺子拉长一倍,又去一步步地比较,从而得出一组组数据。
如此这般循环,最后得出的就是信号的小波分解(小波级数)。
当尺度及位移均作连续变化时,可以理解必将产生大量数据,作实际应用时并不需要这么多的数据,因此就产生了离散的思想。
将尺度作二进离散就得到二进小波变换,同时也将信号的频带作了二进离散。
当觉得二进离散数据量仍显大时,同时将位移也作离散就得到了离散小波变换。
2、二维离散小波变换常用函数三、实验内容:1. 对信号noissin 分别采用图形接口和命令行两种方式进行单尺度小波分解重构和多尺度小波分解重构层数为4,并显示各层低频高频图形,加以比较。
实验四一、实验目的理解小波阈值去噪法原理。
对所得的去噪效果进行分析。
二、实验要求在载入原始图片后,对图片进行含噪和消噪处理,再对所得的图片效果进行分析。
三、主要内容载入原始图片,对原始图片添加一个随机噪声,得出含噪图片。
用sym6小波对图像进行1层分解,设置一个全局阈值,对图像分解系数,将低频系数进行重构,得出消噪后的图像。
再与原图像,含噪图像一起进行分析比较。
运行代码如下clear all;load woman;subplot(2,2,1);image(X);colormap(map);xlabel('(a)原始图像');axis square;init=2055615866;randn('seed',init);x=X+48*randn(size(X));subplot(2,2,2);image(x);colormap(map);xlabel('(b)含噪图像');axis square;%用sym6小波对图像进行1层分解t1=wpdec2(x,1,'sym6');%设置一个全局阈值thr=10.358;%对图像分解系数t2=wpthcoef(t1,0,'s',thr);%对低频系数进行重构x1=wprcoef(t1,1);subplot(2,2,3);image(x1);运行结果四、思考体会小波去噪的根本任务是在小波域将信号的小波变换与噪声的小波变换有效的分离。
噪声的能量分布于整个小波域内,小波分解后,信号的小波系数幅值要大于噪声的系数幅值,也可以认为,幅值比较大的小波系数一般以信号为主,而比较小的系数在很大程度上是噪声。
于是,采用阈值的方法可把信号系数保留,而把大部分噪声系数减少至零。
将含噪信号在各尺度上进行小波分解,保留大尺度(低分辨率)下的全部系数,对于小尺度(高分辨率)下的小波系数,设定一个阈值,幅值不超过阈值的小波系数设置为零,幅值高于该阈值的小波系数或者完整保留,或者做相应的收缩处理,最后将处理后的小波系数利用逆小波变换进行重构,恢复出有效信号。
小波分析小结(小编整理)第一篇:小波分析小结小波分析的形成小波分析是一门数学分支,是继Fourier变换之后新的时频域分析工具。
小波理论的形成经历了三个发展阶段:Fourier变换阶段:Fourier变换是将信号在整个时间轴上进行积分,它将信号的时域特征和频域特征联系起来,分别进行分析。
设信号f(t),其Fourier变换为:F(ω)=⎰f(t)e-iωtdt-∞∞F(ω)确定了f(t)在整个时间域上的频谱特性。
但Fourier变换不能对信号从时域和频域结合起来分析,它是一种全局变换,在时间域上没有任何分辨率。
例:f(t)=1,(-2<=t<=2),其Fourier变换对应图如下:短时Fourier变换阶段:短时Fourier变换即加窗Fourier变换,其思想是把信号分成许多小的时间间隔,用Fourier分析每个时间间隔,以确定该间隔存在的频率,达到时频局部化目的。
其表达式为:Gf(ω,τ)=〈f(t),g(t-τ)ejωt〉=⎰f(t)g(t-τ)e-jωtdtR式中,g(t)为时限函数,即窗口函数,e-jωt起频限作用,Gf(ω,τ)大致反映了f(t)在τ时、频率为ω的信号成分含量。
由上式,短时Fourier变换能实现一定程度上的时频局部化,但窗口函数确定时,窗口大小和形状固定,所得时频分辨率单一。
小波分析阶段:为了克服上述缺点,小波变换应运而生。
小波变换在研究信号的低频成分时其窗函数在时间窗长度上增加,即在频率宽上减小;在研究信号的高频成分时其窗函数在时间窗长度上减小,而在频率宽上增加。
对信号可以进行概貌和细节上的分析。
小波的定义:∝(ω),若满足设ψ(t)∈L2(R)(为能量有限的空间信号),其Fourier变换为ψ容许条件:|ψ(ω)|2⎰-∞|ω|dω<+∞∞∝∝(0)=∞ψ(t)dt=0,说明ψ(t)具有波动则称ψ(t)为母小波,由容许条件可得:ψ⎰-∞性,在有限区间外恒为0或快速趋近于0.t-12以Marr小波ψ(t)=(1-t)e2为例,如下图:2π2将母小波进行伸缩平移所得小波系列称为子小波,定义式如下:ψb,a(t)=1t-bψ(),a>0aa其中a为伸缩因子,b为平移因子。

小波分析浅析—— 李继刚众所周知,以π2为周期的复杂的波都可以用以π2为周期的函数)(t f (模拟信号)来描述,它可以由形如)sin(n n nt A θ+的若干谐波叠加而成,因此,完全有理由认为)(t f 有如下的表现形式:∑∑∑∞=∞=∞=+=+=+=)sin cos ()cos sin cos sin ()sin()(n n n n n n n n n n n nt b nt a nt A nt A nt A t f θθθ为了确定上式中的系数n n b a ,,可以利用Fourier 变换,可以得到函数)(t f 的Fourier 级数,即⎪⎪⎪⎩⎪⎪⎪⎨⎧====++=⎰⎰∑--+∞=ππππππ.,2,1,sin )(1,,1,0,cos )(1),sin cos (2)(10 n ntdt t f b n ntdt t f a nt b nt a a t f n n n n n 如果函数以T 为周期,则通过对t 作Tw x Tt ππ2,2=∆=变换,可以得到函数的Fourier级数,即⎪⎪⎪⎩⎪⎪⎪⎨⎧=∆==∆=∆+∆+=⎰⎰∑--+∞=ππππ.,2,1,sin )(2,,1,0,cos )(2),sin cos (2)(10 n wtdt n t f T b n wtdt n t f T a wt n b wt n a a t f n n n n n 从时域角度来理解Fourier 级数,将}sin ,{cos wt n wt n ∆∆看作是具有频率w n ∆的谐波,则时域表现的函数)(t f 可分解为无穷个谐波之和。
从频域角度来理解Fourier 级数,因为)(t f 的频域范围是[)+∞∈,0w ,所以,可将w 轴用间距w ∆作离散分化,离散点w n ∆处对应着频率为w n ∆的谐波}sin ,{cos wt n wt n ∆∆,这样就可将时域函数)(t f 与谐波组成1-1对应关系,即+∞∆∆↔0}sin ,cos {)(wt n b wt n a t f n nFourier 分析在信号分析处理时,将复杂的时域信号转换到频域中,时域信号和频域信号组成Fourier 变换对,人们既可以在时域中分析信号,也可以在频域中细致的作出特殊分析。
本文部分内容来自网络整理,本司不为其真实性负责,如有异议或侵权请及时联系,本司将立即删除!== 本文为word格式,下载后可方便编辑和修改! ==小波实验报告篇一:小波分析实验报告小波分析实验报告姓名班级:学号:成绩: 教师签名篇二:小波课程实验报告小波变换与信号时频分析实验报告院班级:姓名:学号:指导老师:哈尔滨工业大学二维图像信号的小波分解与重构1.1 实验目的结合小波多分辨率分解与重构原理,掌握利用MATLAB实现二维图像信号小波分解与重构的具体实现方法,重点理解二维图像信号分解与重构过程中小波基选择、图像信号边缘延拓方式对于分解和重构质量的影响,进而加深对于小波正交特性、完善重建特性的理解。
1.2 实验内容主要利用MATLAB提供的小波工具箱Wavelet Toolbox实现小波分解与重构,具体包括:(1)小波基的选择(要求三种以上小波基)(2)延拓方式的选择(3)分解过程中的抽样与非抽样(4)重构结果的分析,要求分析不同小波基、不同延拓方式、抽样/非抽样对于小波重构的影响(5)分析小波对于图像信号表示的方向特性1.3 实验步骤1. 小波变换Matlab实现编程实现图片的分解与重构,程序如下:dwtmode('zpd');X=imread('BARB.BMP');X=im2double(X);nbcol = 255;[cA1,cH1,cV1,cD1] = dwt2(X,'haar');cod_X=wcodemat(X,nbcol);cod_cA1=wcodemat(cA1,nbcol);cod_cH1=wcodemat(cH1,nbcol);cod_cV1=wcodemat(cV1,nbcol);cod_cD1=wcodemat(cD1,nbcol);dec2d = [cod_cA1,cod_cH1;cod_cV1,cod_cD1];X1=idwt2(cA1,cH1,cV1,cD1,'haar');cod_X1=wcodemat(X1,nbcol);subplot(221);imshow(X,[],'InitialMagnification','fit');title('orig image');subplot(222);imshow(dec2d,[],'InitialMagnification','fit');title('dec image');subplot(223);imshow(cod_cA1,[],'InitialMagnification','fit');title('appro image');subplot(224);imshow(cod_X1,[],'InitialMagnification','fit');title('syn image');在Zero-padding延拓方式下,分别取Haar、db3、sym小波基得到的图像分解与重构的结果如下:1) Haar小波基orig imagedec imageappro imagesyn image2) Db3小波基orig imagedec imageappro imagesyn image3) Sym3小波基orig imagedec imageappro imagesyn image在采用db4小波实现图像的分析和重构,分别采用四种不同的延拓方式,得到的的结果如下:1) extension mode为Zero-padding模式,分解与重构的结果为orig imagedec imageappro imagesyn image。

小波分析小结小波分析的形成小波分析是一门数学分支,是继Fourier 变换之后新的时频域分析工具。
小波理论的形成经历了三个发展阶段:Fourier 变换阶段:Fourier 变换是将信号在整个时间轴上进行积分,它将信号的时域特征和频域特征联系起来,分别进行分析。
设信号()f t ,其Fourier 变换为:()()i tF f t e dt ωω∞--∞=⎰()F ω确定了()f t 在整个时间域上的频谱特性。
但Fourier 变换不能对信号从时域和频域结合起来分析,它是一种全局变换,在时间域上没有任何分辨率。
例:()1,(22)f t t =-<=<=,其Fourier 变换对应图如下:短时Fourier 变换阶段:短时Fourier 变换即加窗Fourier 变换,其思想是把信号分成许多小的时间间隔,用Fourier 分析每个时间间隔,以确定该间隔存在的频率,达到时频局部化目的。
其表达式为:(,)(),()()()j t j t f RG f t g t e f t g t e dtωωωτττ-=〈-〉=-⎰式中,()g t 为时限函数,即窗口函数,j te ω-起频限作用,(,)fGωτ大致反映了()f t 在τ时、频率为ω的信号成分含量。
由上式,短时Fourier 变换能实现一定程度上的时频局部化,但窗口函数确定时,窗口大小和形状固定,所得时频分辨率单一。
小波分析阶段:为了克服上述缺点,小波变换应运而生。
小波变换在研究信号的低频成分时其窗函数在时间窗长度上增加,即在频率宽上减小;在研究信号的高频成分时其窗函数在时间窗长度上减小,而在频率宽上增加。
对信号可以进行概貌和细节上的分析。
小波的定义:设2()()t L R ψ∈ (为能量有限的空间信号),其Fourier 变换为µ()ψω,若满足容许条件:·2|()|||d ψωωω∞-∞<+∞⎰则称()t ψ为母小波,由容许条件可得:µ(0)()0t dt ψψ∞-∞==⎰,说明()t ψ具有波动性,在有限区间外恒为0或快速趋近于0.以Marr 小波222())2tt t e ψπ-=-为例,如下图:将母小波进行伸缩平移所得小波系列称为子小波,定义式如下:,()(),0b a t b t a a aψψ-=>其中a 为伸缩因子,b 为平移因子。
小波分析上机实验报告院系:电气工程及自动化学院学科:仪器科学与技术实验一小波分析在信号压缩中的应用一、试验目的(1)进一步加深对小波分析进行信号压缩的理解;(2)学习Matlab中有关信号压缩的相关函数的用法。
二、相关知识复习用一个给定的小波基对信号进行压缩后它意味着信号在小波阈的表示相对缺少了一些信息。
之所以能对信号进行压缩是因为对于规则的信号可以用很少的低频系数在一个合适的小波层上和一部分高频系数来近似表示。
利用小波变换对信号进行压缩分为以下几个步骤来完成:(1)进行信号的小波分解;(2)将高频系数进行阈值量化处理。
对从1 到N 的每一层高频系数都可以选择不同的阈值并且用硬阈值进行系数的量化;(3)对量化后的系数进行小波重构。
三、实验要求(1)对于某一给定的信号(信号的文件名为leleccum.mat),利用小波分析对信号进行压缩处理。
(2)给出一个图像,即一个二维信号(文件名为wbarb.mat),利用二维小波分析对图像进行压缩。
四、实验结果及程序(1)load leleccum%将信号装入Matlab工作环境%设置变量名s和ls,在原始信号中,只取2600-3100个点s = leleccum(2600:3100); ls = length(s);%用db3对信号进行3级小波分解[c,l] = wavedec(s, 3, 'db3');%选用全局阈值进行信号压缩thr = 35;[xd,cxd,lxd,perf0,perfl2] = wdencmp('gbl',c,l,'db3',3,thr,'h',1);subplot(2,1,1);plot(s);title('原是信号s');subplot(2,1,2);plot(xd);title('压缩后的信号xd');图1 实验1压缩结果图2 不同阈值下实验1压缩结果(2)clear %清除Matlab工作环境中现有的变量load wbarb;%显示图像subplot(221); image(X); colormap(map);title('原始图像');axis square;disp('压缩前图像X的大小')whos('X')%==================================================== %对图像用bior3.7小波进行2层小波分解[c,s] = wavedec2(X,2,'bior3.7');%提取小波分解结构中第1层的低频系数和高频系数ca1 = appcoef2(c,s,'bior3.7',1);ch1 = detcoef2('h',c,s,1); %小波分解结构中第1层的水平方向高频系数cv1 = detcoef2('v',c,s,1); %小波分解结构中第1层的垂直方向高频系数cd1 = detcoef2('d',c,s,1); %小波分解结构中第1层的斜线方向高频系数%分别对小波分解结构中第1层的各频率成份进行重构a1 = wrcoef2('a',c,s,'bior3.7',1);h1 = wrcoef2('h',c,s,'bior3.7',1);v1 = wrcoef2('v',c,s,'bior3.7',1);d1 = wrcoef2('d',c,s,'bior3.7',1);c1 = [a1,h1;v1,d1];%显示分解后各频率成分的信息subplot(222);image(c1);axis squaretitle('分解后低频和高频信息');%==================================================== %下面进行图像的压缩处理%保留小波分解结构中第1层的低频信息,进行图像压缩%第1层的低频信息为ca1,显示第1层的低频信息%首先对第1层信息进行量化编码ca1 = wcodemat(ca1,440,'mat',0);%改变图像的亮度ca1 = 0.5*ca1;subplot(223);image(ca1);colormap(map);axis square;title('第一次压缩图像');disp('第一次压缩图像的大小为:')whos('ca1')%==================================================== %保留小波分解第二层低频信息,进行图像的压缩,此时压缩比更大%第2层的低频信息即为ca2,显示第2层的低频信息ca2 = appcoef2(c,s,'bior3.7',2);%首先对第2层低频信息进行量化编码ca2 = wcodemat(ca2,440,'mat',0);%改变图像的亮度ca2 = 0.25*ca2;subplot(224);image(ca2);colormap(map);axis square;title('第2次压缩图像');disp('第2次压缩图像的大小为');whos('ca2')图3 实验2压缩结果五、实验分析及结论(1)根据实验1压缩结果分析得到,压缩后的信号保持了原有信号的轮廓信息,即低频信息,而大部分细节信息(高频信息)得到了消除。
小波实验报告小波实验报告引言小波分析是一种数学工具,可以将信号分解成不同频率的成分。
它在信号处理、图像处理、数据分析等领域有着广泛的应用。
本实验旨在通过对小波变换的实际应用,探索其在信号处理中的效果和优势。
一、实验背景小波分析是一种基于频域的信号分析方法,与传统的傅里叶变换相比,小波分析可以更好地捕捉信号的瞬时特性和局部特征。
它通过将信号与一组基函数进行卷积运算,得到信号在不同尺度和位置上的频谱信息。
二、实验目的1. 了解小波变换的基本原理和概念;2. 掌握小波变换的实现方法和工具;3. 分析小波变换在不同信号处理任务中的应用效果。
三、实验步骤1. 选择适当的小波基函数和尺度参数;2. 将待处理信号进行小波变换;3. 分析小波变换后的频谱信息;4. 根据实际需求,选择合适的尺度和位置,重构信号。
四、实验结果与分析本实验选择了一段音频信号进行小波变换。
首先,选择了Daubechies小波作为基函数,并调整尺度参数。
经过小波变换后,得到了信号在不同频率上的能量分布图。
通过分析能量分布图,可以清晰地观察到信号的频率成分和时域特征。
进一步分析小波变换的结果,可以发现小波变换具有良好的局部化特性。
不同于傅里叶变换将整个信号分解成各个频率的正弦波,小波变换可以将信号分解成不同频率的局部波包。
这种局部化特性使得小波变换在信号分析和处理中更加灵活和精确。
五、实验应用1. 信号去噪小波变换可以将信号分解成不同频率的成分,通过滤除高频噪声成分,实现信号的去噪。
在音频处理和图像处理中,小波去噪已经成为一种常用的方法。
2. 图像压缩小波变换可以将图像分解成不同频率的局部波包,通过保留重要的低频成分,可以实现对图像的压缩。
小波压缩在数字图像处理和视频编码中有着重要的应用。
3. 时频分析小波变换可以提供信号在不同时间和频率上的分布信息,通过时频分析,可以更好地理解信号的时域和频域特性。
在语音识别、心电图分析等领域,时频分析是一种常用的方法。
小波实验报告
《小波实验报告》
小波分析是一种用于信号处理和数据分析的强大工具。
在本次实验中,我们将探索小波分析的基本原理,并通过实验验证其在信号处理中的有效性。
首先,我们介绍了小波分析的基本概念和原理。
小波分析是一种基于窗口函数的信号分析方法,它可以将信号分解成不同频率和时间尺度的成分。
与傅里叶变换不同,小波分析可以同时提供频域和时域的信息,因此在处理非平稳信号和非线性系统时具有独特优势。
接下来,我们进行了一系列实验,验证了小波分析在信号处理中的应用。
我们首先使用小波分析对一段包含多个频率成分的信号进行了分解,并成功地提取出了各个频率成分的时域和频域信息。
接着,我们对一个非平稳信号进行了小波变换,并观察到了小波分析在处理非平稳信号时的优越性。
最后,我们还利用小波分析进行了信号去噪和压缩,结果表明小波分析在这些应用中具有良好的效果。
通过本次实验,我们深刻理解了小波分析的原理和应用,并验证了其在信号处理中的有效性。
小波分析不仅可以帮助我们更好地理解信号的时频特性,还可以在实际工程中发挥重要作用。
我们相信,在未来的研究和应用中,小波分析将会得到更广泛的应用和发展。
小波理论试验汇报院(系)专业学生学号日期12月试验汇报一一、 试验目1. 利用傅立叶变换知识对常见基础函数做基础变换。
2. 加深对因果滤波器了解, 并会判定因果滤波器类型。
3. 利用卷积公式对基础信号做滤波处理并分析, 以加深了解。
4. 熟悉Matlab 中相关函数使用方法。
二、 试验原理1.利用傅立叶正、 反变换基础公式:()ˆ()() ()(),11ˆ()(),22i x i t i ti t i t f f x e dx f t e dt f t e f t fe df t e ωωωωωωωωππ∞∞---∞-∞∞--∞=====⎰⎰⎰及其性质, 对所要处理信号做对应傅里叶变换和逆变换。
2.利用卷积定义式:1212()()()()+∞-∞*=-⎰f t f t f f t d τττ对所求信号做滤波处理。
三、 试验步骤与内容1.试验题目:Butterworth 滤波器, 其冲击响应函数为,0()0,0若若α-⎧≥=⎨<⎩t Ae t h t t 1. 求()h ω2. 判定是否因果; 是低通、 高通、 带通还是带阻?3. 对于信号3()(sin22sin40.4sin2sin40),-=++t f t e t t t t 0π≤≤t ,画出图形()f t4. 画出滤波后图形()*f h t , 比较滤波前后图形, 你会发觉什么, 这里取10α==A 5. 取()(sin5sin3sin sin40),-=+++t f t e t t t t 采取不一样变量值α=A (初始设定A=α=10) 画出原信号图形与滤波后图形, 比较滤波效果。
2.试验步骤及分析过程:1.求()h ω由傅里叶变换定义式可得:()0ˆαϖαϖωαω+∞+∞-----∞=⋅=⋅=+⎰⎰t i t t i t Ah Ae e dt Ae e dt i (1) 故该滤波器幅频特征为: ()ω==H , 转折频率τα=;假定1,2A α==, 绘制该滤波器幅频特征曲线以下:图1.1滤波器幅频特征曲线2. 判定是否因果; 是低通、 高通、 带通还是带阻?(1)观察滤波器响应函数可知, 只有在输入信号抵达后, 该滤波器才会有输出响应, 另外实际应用滤波器均是因果滤波器, 所以, 题中滤波器是因果滤波器。
连续小波时频分析实验-、实验目的通过实验理解小波时频关系,认识小波时频分析的特点,掌握小波时频分析matlab 实现,为小波分析应用打下基础。
二、连续小波变换原理()()R L t f 2∈∀,()t f 的连续小波变换(有时也称为积分小波变换)定义为:()()0,,2/1≠⎪⎭⎫⎝⎛-=⎰∞∞--a dt a b t t f ab a WT f ψ (1) 或用内积形式:()ba f fb a WT ,,,ψ= (2)式中()⎪⎭⎫ ⎝⎛-=-a b t at b a ψψ2/1,。
要使逆变换存在,()t ψ要满足允许性条件:()∞<=⎰∞∞-ωωωψψd C 2ˆ (3)式中()ωψˆ是()t ψ的傅里叶变换。
这时,逆变换为()()()2,1,ada dbb a WT t C t f f b a ⎰⎰∞∞-∞∞--=ψψ(4)ψC 这个常数限制了能作为“基小波(或母小波)”的属于()R L 2的函数ψ的类,尤其是若还要求ψ是一个窗函数,那么ψ还必须属于()R L 1,即()∞<⎰∞∞-dt t ψ故()ωψˆ是R 中的一个连续函数。
由式(3)可得ψˆ在原点必定为零,即()()00ˆ==⎰∞∞-dt t ψψ(5)从式(5)可以发现小波函数必然具有振荡性。
三、连续小波时频图绘制(一)连续小波时频图绘制需要用到的小波工具箱中的三个函数 COEFS = cwt(S,SCALES,'wname')说明:该函数能实现连续小波变换,其中S 为输入信号,SCALES 为尺度,wname 为小波名称。
FREQ = centfrq('wname')说明:该函数能求出以wname 命名的母小波的中心频率。
F = scal2frq(A,'wname',DELTA) 说明:该函数能将尺度转换为实际频率,其中A 为尺度,wname 为小波名称,DELTA 为采样周期。
一. 基础原理 1.小波简介小波一词由Morlet 和Grossman 在1980年代早期提出,其思想来源于伸缩平移方法。
小波分析(wavelet analysis), 或小波转换(wavelet transform)是指用有限长或快速衰减的、称为母小波(mother wavelet)的振荡波形来表示信号。
该波形被缩放和平移以匹配输入的信号。
小波变换是将时间信号展开为小波函数族的线性叠加,小波变换的核函数是小波函数,它在时间和频率域内都是局部化的。
所以,小波变化可对信号同时在时-频域内进行联合分析。
小波变换分成两个大类:离散小波变换 (DWT) 和连续小波转换 (CWT)。
两者的主要区别在于,连续变换在所有可能的缩放和平移上操作,而离散变换采用所有缩放和平移值的特定子集。
小波分析的一个重要领域就是是图像处理。
小波分解可以把小波分层次按照小波基展开,并可以根据图像的性质及给定的图像处理标准确定具体要展开到哪一级,还可以把细节分量和近似分量展开,所以小波分析常用于信号的压缩、去噪等方面,是图像处理的一个极其重要的工具。
本报告中将具体实例说明小波分解在图像中的应用。
2. 小波变换应用包括去噪,图像的压缩,图像的融合以及水印技术。
2.1去噪原理:在实际工程应用中,通常所分析的信号具有非线性,非平稳,并且奇异点较多的特点。
含噪的一维信号模型可表示为:式1其中,f(t)为真实信号,s(t)为含噪信号,e(t)为噪声, σ为噪声标准偏差。
有用信号通常表现为低频信号或是相对比较平稳。
而噪声信号通常表现为高频信号。
利用小波对含噪的原始信号分解后,含噪部分主要集中在高频小波系数中,并且,包含有用信号的小波系数幅值较大,但数目少;而噪声对应的小波系数幅值小,数目较多。
基于上述特点,可以应用门限阈值法对小波系数进行处理。
(即对较小的小波系数置为0,较大的保留或削弱),然后对信号重构即可达到消噪的目的。
在去噪方面,小波分析由于能同时在时-频域中对信号进行分析,具有多分辨分析的功能,所以在不同的分解层上有效的区分信号的突变部分和噪声,从而实现信号的消噪。
小波方法年级:研一专业:高压姓名:吕树明学号:0920300072第1章绪论小波分析(Wavelet Analysis)即小波变换是80年代中期发展起来的一门新兴的数学理论和方法,它被认为是傅立叶分析方法的突破性进展,它具有许多优良的特性。
小波变换的基本思想类似于Fourier变换,就是用信号在一族基函数张成的空间上的投影表征该信号。
经典的Fourier变换把信号按三角正、余弦基展开,将任意函数表示为具有不同频率的谐波函数的线性迭加,能较好地刻划信号的频率特性,但它在时空域上无任何分辨,不能作局部分析,这在理论和应用上都带来了许多不便。
小波分析优于傅立叶之处在于,小波分析在时域和频域同时具有良好的局部化性质,因为小波函数是紧支集,而三角正、余弦的区间是无穷区间,所以小波变换可以对高频成分采用逐渐精细的时域或空间域取代步长,从而可以聚焦到对象的任意细节。
因此,小波变换被誉为分析信号的显微镜,傅立叶分析发展史上的一个新的里程碑。
小波分析是一个新的数学分支,它是泛函分析、傅立叶分析、数值分析的最完美结晶;在应用领域,特别是在信号处理、图象处理、语音分析、模式识别、量子物理、生物医学工程、计算机视觉、故障诊断及众多非线性科学领域都有广泛的应用。
AbstractWavelet Analysis (order Wavelet), Wavelet transform is mid 80's developed a new mathematical theory and method, it is believed to be the Fourier Analysis method, it is the breakthrough of many excellent properties. The basic thought of wavelet transform is similar with Fourier signal in gens function of space projection lodged open like the signal representation. The Fourier transform of the classical signal by triangle is, the yankees will be arbitrarily, cosines with different frequency function for the linear superposition of harmonic function, can characterize the signal frequency characteristics, but when it without any resolution airspace, cannot make local analysis, it in theory and application are brought much inconvenience. Wavelet analysis is superior to Fourier, wavelet analysis in time domain and frequency domain, also have good properties, because the localization of wavelet function is tight, and triangle is a collection of interval is infinite, cosine interval, so the wavelet transformation of high frequency components can be refined by gradually replacing time or space domain, which can step length on any object to details. Therefore, the wavelet transform is regarded as the microscope, the analysis of signal in the history of the Fourier analysis, a new milestone. Wavelet analysis is a new branch of mathematics, it is the functional analysis, Fourier analysis, numerical analysis of the most perfect, In the fields of application, especially in the image processing and signal processing, analysis and pattern recognition, quantum physics, biomedical engineering, computer vision, fault diagnosis and nonlinear science is widely used in the field.Key words: wavelet Analysis, harmonic function, diagnosis第2章 傅立叶变换2.1周期信号的傅里叶级数任一满足狄利克雷条件的周期信号()f t (1T 为其周期)可展开为傅里叶级数。