挖掘机液压系统恒功率控制曲线图
- 格式:pdf
- 大小:56.68 KB
- 文档页数:1
液压挖掘机有两种油路: 开中心直通回油六通阀系统和闭中心负载敏感压力补偿系统, 我国国产液压挖掘机大多采用”开中心”系统, 而国外著名的挖掘机厂家基本上都采用”闭中心”系统。
闭中心具有明显的优点, 但价格较贵。
国内厂家对开中心系统比较熟悉, 而对闭中心系统不太了解,因此有必要来介绍一下闭中心系统, 本文重点分析力士乐闭中心负载敏感压力补偿(LUDV> 挖掘机油路。
LUDV 意为与负载无关的分配阀。
LUDV系统力士乐挖掘机液压系统可以看作由以下4 部分组成:①多路阀液压系统(主油路> 。
②液压泵控制液压系统(包括与发动机综合控制> 。
③各液压作用元件液压子系统, 包括动臂、斗杆、铲斗、回转和行走液压系统, 还包括附属装置液压系统。
④多路阀操纵和控制液压系统。
LUDV系统是力士乐等公司在改进负荷传感技术的基础上发展起来的,它是不受负载影响的流量分配系统,它将常开式压力补偿改为常闭式,泵所提供的流量与负载所需相匹配,避免了不必要的空流和节流损失。
即使泵的流量小于系统复合动作所需的流量,各动作的相对速度也不会发生变化,从而保证动作的协调性,避免动作冲击。
1 多路阀液压系统多路阀液压系统是液压挖掘机的主油路, 它确定了液压泵如何向各液压作用元件的供油方式, 决定了液压挖掘机的工作特性。
力士乐采用的闭中位负载敏感压力补偿多路阀液压系统的工作原理见图1 (因换向阀不影响原理分析, 故未画出> 。
图1 挖掘机力士乐主油路简图挖掘机力士乐主油路由工装油路和回转油路二个负载敏感压力补偿系统组成。
1.1 工装油路工作装置和行走油路(除回转外> 简称工装油路,用阀后补偿分流比负载敏感压力补偿(LUDV>系统, 具有抗饱和功能。
在每个操纵阀阀杆节流口后, 设压力补偿阀, 然后通过方向阀向各液压作用元件供油。
LUDV 多路阀原理符号见图2 。
图2 力士乐多路阀原理符号图LUDV 每个阀块主要由操纵阀和压力补偿阀组成, 其原理符号如图2a 所示。


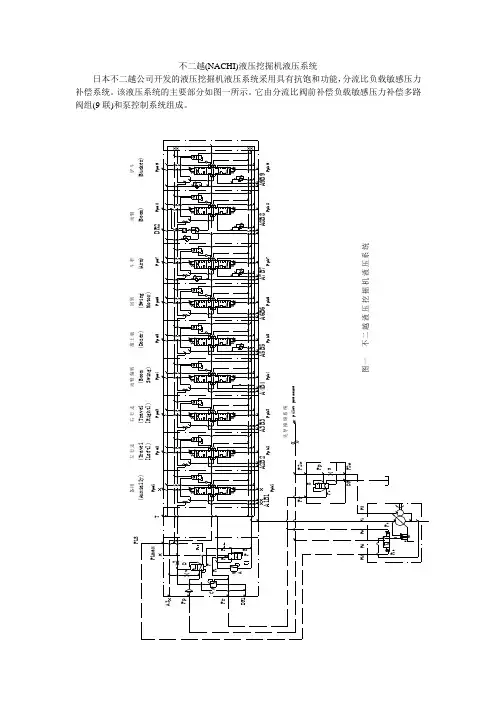
不二越(NACHI)液压挖掘机液压系统一.分流比阀前补偿负载敏感压力补偿多路阀组该阀组有九个阀杆(左右行走,回转,动臂,斗杆,铲斗,推土板和后备),另有四个控制阀(安全阀A,卸载阀B,切断阀C和压差减压阀D)。
在每个阀前设压力补偿阀,各阀通路情况和工作原理如图二(a),(b),(c)所示,该阀为三位十二通阀,有二个进油P口,三个回油T口,三个LS(压力补偿口),二个执行器(A、B)口,二个先导油压(Pi)控制油口(进出口),如图二(a)所示。
为了清楚地了解油口连通情况,图二(b)画出了一个阀位(中位),来表示油路连接情况。
如果把相同的油口合并,并取掉先导控制油口,则该阀实际上是带补偿油口的三位四通阀,如图二(c)所示。
压力补偿阀左端受阀杆进口压力P m作用,右端受补偿压力P LS和该阀杆的负载压力(阀杆出口压力)P L作用,从压力补偿阀阀杆力平衡可得:P m=P L+P LS阀杆进出口的压差△P为:△P=P m-P L=P LS各压力补偿阀右端都受P LS作用,因此各阀杆的进出口的压差都相等。
经各压力补偿阀的压差为:△P=P-P m=P-P L-P LS因同时动作的各阀的负载压力P L是不同的,因此同时动作时,各压力补偿阀的压降不二.压差减压阀两次压力反馈负载敏感系统(见图三)该负载敏感阀采用阀前补偿,采用一个等差减压阀,该减压阀是二位三通阀(图一中D),有三条通路:P油泵压力油,补偿压力油P LS和回油路,其一端受油泵压力P作用,另一端受最高负载压力P Lmax和减压阀输出压力P LS作用。
从减压阀力平衡可知,该减压阀输出的油压为:P LS=P-P Lmax压差减压阀输出油泵压力和最高负载压力之差P LS,作用在各压力补偿阀的左端和油泵流量调节阀的左端。
从油泵流量调节阀力平衡可知:P LS=F S/A式中:F S:流量调节阀弹簧力A:流量调节阀受压面积当P LS>F S/A流量调节阀在右位,油泵压力油进入变量油缸使油泵流量减小当P LS<F S/A流量调节阀在左位,变量油缸回油,在弹簧力作用下,使油泵流量增加流量调节阀控制补偿压力P LS的大小。
挖掘机液压系统图一.液压挖掘机液压系统的基本类型液压挖掘机液压系统大致上有定量系统、变量系统和定量、变量复合系统等三种类型。
1.定量系统在液压挖掘机采用的定量系统中,其流量不变,即流量不随外载荷而变化,通常依靠节流来调节速度。
根据定量系统中油泵和回路的数量及组合形式,分为单泵单回路定量系统、双泵单回路定量系统、双泵双回路定量系统及多泵多回路定量系统等。
2.变量系统在液压挖掘机采用的变量系统中,是通过容积变量来实现无级调速的,其调速方式有三种:变量泵-定量马达调速、定量泵-变量马达调速和变量泵-变量马达调速。
单斗液压挖掘机的变量系统多采用变量泵-定量马达的组合方式实现无极变量,且都是双泵双回路。
根据两个回路的变量有无关连,分为功率变量系统和全功率变量系统两种。
其中的分功率变量系统的每个油泵各有一个功率调节机构,油泵的流量变化只受自身所在回路压力变化的影响,与另一回路的压力变化无关,即两个回路的油泵各自独立地进行恒功率调节变量,两个油泵各自拥有一半发动机输出功率;全功率变量系统中的两个油泵由一个总功率调节机构进行平衡调节,使两个油泵的摆角始终相同。
同步变量、流量相等。
决定流量变化的是系统的总压力,两个油泵的功率在变量范围内是不相同的。
其调节机构有机械联动式和液压联动式两种形式。
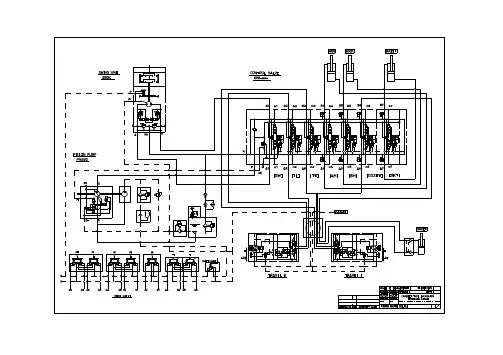
二.YW-100型单斗液压挖掘机液压系统国产YW-100型履带式单斗液压挖掘机的工作装置、行走机构、回转装置等均采用液压驱动,其液压系统如图1所示。
该挖掘机液压系统采用双泵双向回路定量系统,由两个独立的回路组成。
所用的油泵1为双联泵,分为A、B两泵。
八联多路换向阀分为两组,每组中的四联换向阀组为串联油路。
油泵A输的压力进入第一组多路换向阀,驱动回转马达、铲斗油缸、辅助油缸,并经中央回转接头驱动右行走马达7。
该组执行元件不工作时油泵A输出的压力油经第一组多路换向阀中的合流阀进入第二组多路换向阀,以加快动臂或斗杆的工作速度。
油泵B输出的压力油进入第二组多路换向阀,驱动动臂油缸、斗杆油缸,并经中央回转接头驱动左行走马达8和推土板油缸6。
典型液压传动系统实例分析(总32页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--第四章典型液压传动系统实例分析第一节液压系统的型式及其评价一、液压系统的型式通常可以把液压系统分成以下几种不同的型式。
1.按油液循环方式的不同分按油液循环方式的不同,可将液压系统分为开式系统和闭式系统。
(1)开式系统如图所示,开式系统是指液压泵1从油箱5吸油,通过换向阀2给液压缸3(或液压马达)供油以驱动工作机构,液压缸3(或液压马达)的回油再经换向阀回油箱。
在泵出口处装溢流阀4。
这种系统结构较为简单。
由于系统工作完的油液回油箱,因此可以发挥油箱的散热、沉淀杂质的作用。
但因油液常与空气接触,使空气易于渗入系统,导致工作机构运动的图开式系统不平稳及其它不良后果。
为了保证工作机构运动的平稳性,在系统的回油路上可设置背压阀,这将引起附加的能量损失,使油温升高。
70在开式系统中,采用的液压泵为定量泵或单向变量泵,考虑到泵的自吸能力和避免产生吸空现象,对自吸能力差的液压泵,通常将其工作转速限制在额定转速的75%以内,或增设一个辅助泵进行灌注。
工作机构的换向则借助于换向阀。
换向阀换向时,除了产生液压冲击外,运动部件的惯性能将转变为热能,而使液压油的温度升高。
但由于开式系统结构简单,因此仍为大多数工程机械所采用。
(2)闭式系统如图所示。
在闭式系统中,液压泵的进油管直接与执行元件的回油管相联,工作液体在系统的管路中进行封闭循环。
闭式直系统结构较为紧凑,和空气接触机会较少,空气不易渗入系统,故传动的平稳性好。
工作机构的变速和换向靠调节泵或马达的变量机构实现,避免了在开式系统换向过程中所出现的液压冲击和能量损失。
但闭式系统较开式系统复杂,由于闭式系统工作完的油液不回油箱,油液的散热和过滤的条件较开式系统差。
为了补偿系统中的泄漏,通常需要一个小容量的补油泵进行补油和散热,因此这种系统实际上是一个半闭式系统。
挖掘机控制系统讲解1.中心开式负荷传感系统原理图1表明中心开式负荷传感液压系统(OLSS)的原理。
图2是主泵工作的特性曲线,泵在一定转速下,工作点无论在哪条曲线上,它的纵、横坐标分别是压力和流量,两者的乘积就是功率。
图1中所表示的操纵阀是大为简化了的多路阀示意图,它由先导或机械手柄、踏板控制其开度。
阀芯在中位时,其中心油路是开放的,主泵回油从此通过,故称之为“中心开式”。
手柄、踏板开度增大时,阀芯A口、B口开度也按比例增大,工作油量增多,使阀中心开度减小、回油量减小;反之,回油量则增大。
射流传感器(以下称射流阀)装于多路阀回油路的末端,主阀开度越小,则回油量越大,射流阀的进、出油压差就越大,其输出压差(Pd-Pb)也越大;反之,此压差就越小。
在主泵上还装有负流量控制阀(NC阀),当Pd-Pb压差增大时,它的开度就减小,使控制泵油压Pi减小、主泵输出功率减小;反之,输出功率增大。
该系统在发动机带动主泵空运转时,全部液压油通过主阀中心及射流阀回油箱,此时射流阀进、出油压差最大,输出压差Pd-Pb也最大,NC阀开度最小,控制泵的油压受到最强的节流,输出油压Pi最小,主泵伺服缸驱使主泵输出最小流量。
当人为操作控制手柄、踏板满负荷工作时,情况与以上相反,主阀回油量最小,主泵输出最大功率(见图2)。
当中度负荷工作时,控制主阀开度不大,主泵输出功率介于上述两种情况之间,按与其开度相适应的特性曲线工作(主阀开度大小决定工作的那条曲线),以节省能量。
图3中的(a)、(b)、(c)分别是在空负荷、轻负荷和强阻力作业时该系统的节能效果图。
传统的恒功率控制只在最外特性曲线上工作,所消耗的功率由0abc四边形面积决定;中心开式负荷传感系统也可在最外特性曲线上工作,但当在空负荷、轻负荷和强阻力作业时,消耗功率由0123四边形面积决定,两者的面积差(图中影线部分)就是后者较前者所节省的能量。
2.负流量控制系统原理图4表示负流量控制系统原理。