计算机控制的直流调速系统
- 格式:ppt
- 大小:1.10 MB
- 文档页数:45
目录1α= β配合控制的直流可逆调速系统的工作原理2 α =β配合控制的有环流直流可逆调速系统的仿真模型及参数3 仿真结果及分析4 心得体会5 参考文献摘要:针对面向系统传递函数结构图仿真方法的不足,提出了一种基于MATLAB的Simulink和Power System工具箱、面向系统电气原理结构图的仿真新方法,实现了转速与电流双闭环α= β 配合控制的直流可逆调速系统的建模与仿真。
分别介绍了同步脉冲触发器、移相器控制器和PI调节器的建模,给出了直流可逆调速系统的仿真模型和仿真结果,仿真结果表明了仿真算法可信度较高。
关键词: α= β 配合控制;直流电机;MATLAB仿真;移项控制器Abstract: Anovelmethod ofconstruction& simulation was put forward forthe modelofα =βmoderating controlDC SRsystem basedon Matlab Simulink &Power SystemBlockset,beca use it was shortagefor facing system transferfunctionconstruction drawingto simulate.Themodel of synchronized6-pulsegenerator, shifter and PI controller were introduced,andthe simulationresults&models for theα= βmoderating control DC SRsystem were provided. Simulation results showthat simulation methodis correct withhighcredibility.Key words:α =β moderating control; DC motor; MATLAB simulation;shifter引言晶闸管反并联的电枢可逆线路是可逆调速系统的典型线路之一。
直流调速系统研究背景意义及国内外现状1 研究的背景及意义2 直流调速系统国内外研究现状1 研究的背景及意义电气传动技术以电动机控制为控制对象,以微电子装置为核心,以电力电子功率变换装置为执行机构,在自动控制理论指导下组成电气传动控制系统。
因电机种类的不同分为直流电动机传动(简称直流传动)、交流电动机传动(简称交流传动)、步进电机传动(简称步进传动)、伺服电动机传动(简称伺服传动)等等。
众所周知,与交流调速系统相比,由于直流调速系统的调速精度高,调速范围广,变流装置控制简单,长期以来在调速传动中占统治地位。
在要求调速性能较高的场合,一般都采用直流电气传动。
目前,通过对电动机的控制,将电能转换为机械能进而控制工作机械按给定的运动规律运行且使之满足特定要求的新型电气传动自动化技术已广泛应用于国民经济的各个领域。
三十多年来,直流电机传动经历了重大的变革。
首先实现了整流器的更新换代,以晶闸管整流装置取代了习用已久的直流发电机电动机组及水银整流装置使直流电气传动完成了一次大的跃进。
同时,控制电路已经实现高集成化、小型化、高可靠性及低成本。
以上技术的应用,使直流调速系统的性能指标大幅提高,应用范围不断扩大。
直流调速技术不断发展,走向成熟化、完善化、系列化、标准化,在可逆脉宽调速、高精度的电气传动领域中仍然难以替代。
由于直流电气传动技术的研究和应用已达到比较成熟的地步,应用相当普遍,尤其是全数字直流系统的出现,更提高了直流调速系统的精度及可靠性。
所以,今后一个阶段在调速要求较高的场合,如轧钢厂、海上钻井平台等,直流调速仍然处于主要地位。
早期直流传动的控制系统采用模拟分离器件构成,由于模拟器件有其固有的缺点,如存在温漂、零漂电压,构成系统的器件较多,使得模拟直流传动系统的控制精度及可靠性较低。
随着计算机控制技术的发展,直流传动系统已经广泛使用微机,实现了全数字化控制。
由于微机以数字信号工作,控制手段灵活方便,抗干扰能力强。
基于MATLAB的数字PID直流电机调速系统本文主要研究基于MATLAB的数字PID直流电机调速系统。
直流电机是工业生产中常用的电机,其调速系统对于保证生产效率和质量至关重要。
因此,研究直流电机调速系统的控制方法和参数设计具有重要意义。
本文将首先介绍直流电机的数学模型和调速系统的工作原理,然后探讨常规PID控制器的设计方法和参数控制原理,最后通过MATLAB仿真实验来研究数字PID控制器的设计和应用。
2 直流电机调速系统的数学模型直流电机是一种常见的电动机,其数学模型可以用电路方程和动力学方程来描述。
电路方程描述了电机的电气特性,动力学方程描述了电机的机械特性。
通过这两个方程可以得到直流电机的数学模型,为后续的控制器设计提供基础。
3 直流电机调速系统的工作原理直流电机调速系统是通过控制电机的电压和电流来改变电机的转速。
其中,电压和电流的控制可以通过PWM技术实现。
此外,还可以通过变换电机的电极连接方式来改变电机的转速。
直流电机调速系统的工作原理是控制电机的电压和电流,从而控制电机的转速。
4 常规PID控制器的设计方法和参数控制原理常规PID控制器是一种常见的控制器,其控制原理是通过比较实际输出值和期望输出值来调整控制器的参数,从而实现控制目标。
常规PID控制器的参数包括比例系数、积分系数和微分系数,这些参数的选取对于控制器的性能有重要影响。
常规PID控制器的设计方法是通过试错法和经验公式来确定参数值。
5 数字PID控制器的设计和应用数字PID控制器是一种数字化的PID控制器,其优点是精度高、可靠性强、适应性好。
数字PID控制器的设计方法是通过MATLAB仿真实验来确定控制器的参数值。
数字PID控制器在直流电机调速系统中的应用可以提高系统的控制精度和稳定性。
6 结论本文主要研究了基于MATLAB的数字PID直流电机调速系统,介绍了直流电机的数学模型和调速系统的工作原理,探讨了常规PID控制器的设计方法和参数控制原理,最后研究了数字PID控制器的设计和应用。
《计算机控制技术课程设计》题目:基于STM32的直流电机PID调速学院:计算机与电子信息学院专业:电气工程及其自动化班级:电气12-5 学号:姓名:任课教师:完成时间:——基于STM32的直流电机PID调速摘要电机转速控制在运动控制系统中占有至关重要的地位,本设计将电机转速控制作为研究对象;以PID为基本控制算法,STM32F103单片机为控制核心,产生受PID算法控制的PWM脉冲实现对直流电机转速的控制。
同时利用光电传感器将电机速度转换成脉冲频率反馈到单片机中,实现转速闭环控制,达到转速无静差调节的目的。
在系统中采320×240TFTLCD显示器作为显示部件,通过4个按键通过界面切换方式设置P、I、D、V四个参数和正反转控制,启动后可以通过显示部件了解电机当前的运行状态和系统的CPU温度。
该系统控制精度高,具有很强的抗干扰能力。
关键词:PID 直流电机反馈调节Based on the STM32 PID speed control of dc motorAbstractMotor speed control occupies a crucial position in the motion control system, the design of the motor speed control for the study; in the basic PID control algorithm, STM32F103 microcontroller core, by the PID control algorithm generates a PWM pulse to achieve DC speed control. At the same time the use of photoelectric sensors to convert the motor speed to pulse frequency feedback to the microcontroller to achieve closed-loop speed control, to speed static error adjustment purposes. Mining 320 × 240TFTLCD monitor as a display unit in the system, through four key settings P, I, D, V four parameters and reversing control through the interface switching mode, start to understand the current state of the motor and the system through the display unit CPU temperature. The system control and high precision, has a strong anti-jamming capability.Keywords: PID DC motor feedback regulation目录1. 绪论 (1)研究背景与意义 (1)本文主要研究方法 (1)2. 设计方案与论证 (2)系统设计方案 (2)控制器模块设计方案 (2)3. 系统硬件电路设计 (3)整体电路设计 (3)整体理论 (3)整体简单结构图和资源分配图 (3)最小单片机系统设计 (4)STM32F103复位电路 (6)电源电路 (6)电机驱动电路设计 (7)光电码盘编码器电路设计 (7)显示电路设计 (8)按键电路设计 (10)4. 系统软件设计 (10)PID算法 (10)PID参数整定方法 (11)电机速度采集算法 (12)程序流程图 (12)5. 系统调试 (13)软件调试 (13)系统测试与分析 (14)6. 总结与展望 (15)参考文献 (16)附录一部分程序源程序 (17)附录二系统界面实物图和PCB图 (20)1.绪论1.1研究背景与意义电动机在现代的工业中,是主要的驱动设备,尤其是直流电动机,由于它的平滑调速性和结构上的简单,使其成为许多电器,如洗衣机,电梯等的驱动。
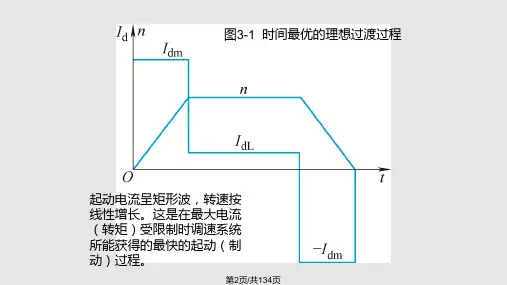
摘要由于变频技术的出现,交流调速一直冲击直流调速,但综观全局,尤其是我国在此领域的现状,再加上全数字直流调速系统的出现,提高了直流调速系统的精度及可靠性,直流调速仍将处于重要地位。
对于直流调速系统转速控制的要求有稳速、调速、加速或减速三个方面,而在工业生产中对于后两个要求已能很好地实现,但工程应用中稳速指标却往往不能达到预期的效果,稳速要求即以一定的精度在所需要的转速上稳定运行,在各种干扰下不允许有过大的转速波动。
稳速很难达到要求原因在于数字直流调速装置中的PID调节器对被控对象及其负载参数变化自适应能力差。
模糊控制不要求被控对象的精确模型且适应性强,为了克服常规数字直流调速装置的缺点,本文将模糊控制与PID调节器结合,着手fuzzy-PID复合控制方案理论研究和硬件的实现,设计出相关控制方案的直流调速系统,该方案以AT89C51单片机为主控单元,合适的驱动电路和一些外围电路构成硬件系统;以参数模糊自整定PID为控制策略。
本文对于系统的硬件及软件设计进行了详细的设计,包括电机控制模块、检测模块、电机驱动模块的设计等,以及软件的控制思想和编程方法。
本系统的设计顺应了目前国外直流调速朝着数字化,发展的趋势,充分利用了单片机的优点,使得通用性得到了提高。
经过理论分析和设计此控制器的各项性能指标优于模糊控制器和常规PID 控制器,具有很强的鲁棒性。
关键词:模糊控制;直流调速;稳态性能;单片机AbstractAfter Frequency Conversion Technology appeared,AC speed regulation method had always impacted DC Speed Regulation,but Generally speaking,especially the status in our country,in addition to digital DC Speed Regulation emerged,it improving the precision and the reliability in DC Speed Regulation System.DC Speed Regulation was also in the important status.Speed stability、speed ratio、acceleration、deceleration are the four factors in DC Speed Regulation System,the last two factors already reached well in industry application.But the Stability index does not match the desired purpose.Stability index is that the DC motor running in the precision range on desired speed,even if the system has uncertain disturbance.It is hard to realize because of adaptiveability digital DC Speed Regulation device is not enough when in the condition of the load parameters change unpredictably.Fuzzy control does not need precision mathematic model to conquer the shortcoming in routine digital DC Speed Regulation.We can combine with the PID adjuster and fuzzy control,focusing on theory research and realization of fuzzy-PID compound control scheme,design relevant DC Speed Regulation System was designed in the dissertation.This scheme is based on the core of AT89C51 single chip,appropriate driver circuit and some peripheral circuits,Fuzzy Self-tuning PID is the control strategy,This dissertation also introduce the plan of hardware and software,including DC motor control module、driver module、examine circuit and so on in detail,if explained the method of control and the thought of software,this system got used to the trend of digital power in the international,used the single micro—computer fully,and improveed the general use of the power.Theoretical analysis and design showed that all performance indexes of Parameter Self-Adjusting Fuzzy Logic PID Controller was in advance of those of the simple fuzzy controller and the conventional PID controller.Especially,the adaptive fuzzy controller is robust.Keywords:fuzzy logic control(FLC);DC Speed Regulation;stability performance;Single micro-computer目 录摘 要 .................................................................................................................................................I Abstract ......................................................................................................................................... II 目 录 ............................................................................................................................................ I II第一章 绪论 (1)1.1 序言 (1)1.2 PID 控制中存在的问题 (1)1.3 模糊控制的发展状况 (2)模糊控制的发展过程 (2)模糊控制技术要解决的问题 (3)1.4 直流调速系统的发展概况 (4)1.5 本课题的研究内容及目的 (5)第二章 直流调速系统的理论分析 (6)2.1 控制理论在调速系统中的应用分析 (6)调速系统性能指标 (6)直流调速常用的方法 (7)2.2 传统直流调速系统中调节器参数的计算 (9)设计指标及要求 (9)固有、预置参数计算 (9)电流调节器参数计算 (10)转速调节器参数 (10)2.3 数字PID 调节器的原理及应用 (12)2.4 数字PID 控制器的算法实现 (14)第三章 模糊PID 控制算法设计 (16)3.1 模糊控制的原理 (16)模糊控制的理论基础 (16)模糊控制系统的组成 (16)模糊控制在实际中的适用性 (17)3.1.4 模糊控制器的设计方法 (17)3.2直流调速系统模糊PID 控制结构设计 .......................................................................... 18 被控过程对参数P K 、I K 、D K 的自整定要求 (19)3.3模糊自整定PID 参数控器设计 (20)确定控制器的输入、输出语言变量 (20)3.3.2确定各语言变量论域,在其论域上定义模糊量 .............................................. 21 确定P K 、I K 、D K 的调节规则 .. (21)模糊推理和模糊运算 (22)第四章 调速系统硬件设计 (24)4.1硬件总体方案设计 (24)4.2 主电路设计 (24)4.3 整流电力二极管参数的确定 (25)4.4 IGBT 的选择 (26)4.5 IGBT 驱动电路的设计 (26)IGBT 驱动电路的一般要求 (26)IGBT 的专用驱动集成电路 (26)4.6 泵升电压的抑制 (28)4.7 电流反馈信号检测装置设计 (29)概述 (29)4.7.2 电流检测装置的设计 (30)4.8转速检测环节及其与单片机接口电路的设计 (30)4.9 模拟量给定电流、转速反馈量与单片机的接口设计 (32)4.10 键盘与显示接口电路 (32)第五章系统软件设计 (34)5.1主程序 (34)5.2 A/D转换设计 (35)5.3键盘与显示子程序设计 (36)5.4模糊PID控制流程设计 (37)结论 (38)参考文献 (39)致谢 (42)第一章绪论1.1 序言在现代化的工业生产过程中,几乎无处不使用电力传动装置,生产工艺、产品质量的要求不断提高和产量的增长,使得越来越多的生产机械要求能实现自动调速。

![全数字控制的桥式可逆直流脉宽调速系统设计 [附图+中英文翻译]](https://uimg.taocdn.com/8a2bccc6aa00b52acfc7cae3.webp)
XXXXXXXX大学本科生毕业设计姓名:XXX 学号:XXXX学院:信息与电气工程学院专业:电气工程与自动化设计题目:全数字控制的桥式可逆直流脉宽调速系统设计专题:指导教师:XXXX 职称:XXXXXXXX年6月XXXXXXXX大学毕业设计任务书学院信息与电气工程学院专业年级电气02—3 学生姓名曹言敬任务下达日期:XXXX年2月20日毕业设计日期:XXXX 年 2 月20日至XXXX 年6月20日毕业设计题目:全数字控制的桥式可逆直流脉宽调速系统设计毕业设计专题题目:毕业设计主要内容和要求:1、直流电机的参数为15KW,电枢电压440V,电枢电流39.5A,励磁电压90V,励磁电流7A,转速为1510转/分。
2、制定主电路方案并进行选型设计计算。
3、用PROTEL设计全数字控制系统的电路原理图及PCB图。
4、编制控制软件。
5、基于MATLAB对桥式可逆直流脉宽调速系统进行仿真研究。
6、翻译与论文相关的电气自动化方面专业外文资料约5000字。
7、用OFFICE—WORD打印论文。
院长签字:指导教师签字:XXXXXXXX大学毕业设计指导教师评阅书指导教师评语(①基础理论及基本技能的掌握;②独立解决实际问题的能力;③研究内容的理论依据和技术方法;④取得的主要成果及创新点;⑤工作态度及工作量;⑥总体评价及建议成绩;⑦存在问题;⑧是否同意答辩等):成绩:指导教师签字:年月日XXXXXXXX大学毕业设计评阅教师评阅书评阅教师评语(①选题的意义;②基础理论及基本技能的掌握;③综合运用所学知识解决实际问题的能力;③工作量的大小;④取得的主要成果及创新点;⑤写作的规范程度;⑥总体评价及建议成绩;⑦存在问题;⑧是否同意答辩等):成绩:评阅教师签字:年月日XXXXXXXX大学毕业设计答辩及综合成绩摘要直流脉宽调速系统,是采用脉冲宽度调制的高频开关控制方式,形成的脉宽调制变换器——直流电动机调速系统,简称直流PWM调速系统。
直流电机调速的PLC控制背景:使用直流电机有许多优点如:电机调速经济,控制方便;机械特性较硬,稳定性较好;PLC电动机转速控制可以完成了液位控制、直流电动机旋转控制组态图,使得操作人员通过计算机屏幕对现场的运行情况一目了然。
用户可以通过组态图随时了解、观察并掌握整个控制系统的工作状态,必要时还可以通过界面向控制系统发出故障报警,进行人工干预。
一、硬件输入输出接口电路实际上是PLC与被控对象间传递输入输出信号的接口部件。
输入输出接口电路要有良好的电隔离和滤波作用。
1.输入接口电路输入输出信号分为开关量、模拟量及数字量。
可编程控制器的一个重要特点就是所有的输入输出信号全部经过了隔离,无论任何形式的输入输出最终都是经过光电偶合口或继电器将信号传入/送出PLC。
由于生产过程中使用的各种开关、按钮、传感器等输入器件直接接到PLC输入接口电路上,为防止由于触点抖动或干扰脉冲引起错误的输入信号,输入接口电路必须有很强的抗干扰能力[1]。
2.输出接口电路根据驱动负载元件不同可将输出接口电路分为三种形式:一种是继电器输出型,CPU接通继电器的线圈,继而吸合触点,而触点与外线路构成回路;另一种是晶体管输出,它是通过光偶合使开关晶体管通断以控制外电路;再一种就是可控硅输出型,这里的可控硅是采用光触发型的。
二、软件第一部分为系统监控程序。
它是每一个可编程控制器成品必须包括的部分,是由可编程控制器的制造者编制的,用于控制可编程控制器本身的运行。
另一部分为用户程序。
它是由可编程控制器的使用者编制的,用于控制被控装置的运行。
这里主要介绍监控程序。
系统管理程序是监控程序中最重要的部分,整个可编程控制器的运行都由它主管。
管理程序又分为三个部分:第一部分是运行管理,控制可编程控制器何时输入、何时输出、何时自检等等,进行时间上的分配管理。
第二部分进行存储空间的管理,即生成用户环境,由它规定各种参数、程序的存放地址,将用户使用的数据参数存储地址转化为实际的数据格式及物理存放地址。
.0 前言直流调速和交流调速相比,直流调速具有宽广的调速围, 平滑的调速特性,较高的过载能力和较大的起动、制动转矩, 使用寿命长,经济性好。
因此被广泛地应用于调速性能要求较高的场合。
在工业生产中, 需要高性能速度控制的电力拖动场合, 直流调速系统发挥着极为重要的作用, 高精度金属切削机床, 大型起重设备、轧钢机、矿井卷扬、城市电车等领域都广泛采用直流电动机拖动。
特别是晶闸管—直流电动机拖动系统,具有自动化程度高、控制性能好、起动转矩大, 易于实现无级调速,使用寿命长,所以相对经济性好等优点而被广泛应用在现代化生产当中。
本设计采用以AT89C51单片机为核心的数字PI调节器,由软件编程来完全成模拟控制功能的数字式传动系统,能够有效地抑制老化和各种干扰,还能完成故障诊断,信号显示等功能。
随着微型计算机、超大规模集成电路、新型电力电子开关器件和传感器的出现,以与自动控制理论、电力电子技术、计算机控制技术的深入发展,电气传动装置不断向前发展。
微机的应用使电气传动控制系统趋向于数字化、智能化,极推动了电气传动的发展。
1 / 771 直流调速的介绍1.1 直流调速与交流调速的比较在现代化的工业生产过程中,几乎处处使用电力传动装置,随着生产工艺、产品质量的要求不断提高和产量的增长,使得越来越多的生产机械要求能实现自动调速。
对可调速的电气传动系统,可分为直流调速和交流调速。
直流调速与交流调速比较,最大的优点就是直流电机可以实现“平滑而经济的调速”;直流电机的调速不需要其它设备的配合,可通过改变输入的电压/电流,或者励磁电压/电流来调速。
直流电动机具有优良的调速特性,调速平滑、方便,易于在大围平滑调速,过载能力大,能承受频繁的冲击负载,可实现频繁的无级快速起制动和反转,能满足生产过程自动化系统中各种不同的特殊运行要求,而交流调速虽然维护简单方便,但调速比较困难需要和其它设备配合使用如需要增设变频器等才能实现调速。
基于51单片机的PWM直流电机调速系统一、本文概述随着现代工业技术的飞速发展,直流电机调速系统在众多领域如工业自动化、智能家居、航空航天等得到了广泛应用。
在众多调速方案中,基于脉冲宽度调制(PWM)的调速方式以其高效、稳定、易于实现等优点脱颖而出。
本文旨在探讨基于51单片机的PWM直流电机调速系统的设计与实现,以期为相关领域的技术人员提供一种可靠且实用的电机调速方案。
本文将简要介绍PWM调速的基本原理及其在直流电机控制中的应用。
随后,将详细介绍基于51单片机的PWM直流电机调速系统的硬件设计,包括电机选型、驱动电路设计、单片机选型及外围电路设计等。
在软件设计部分,本文将阐述PWM信号的生成方法、电机转速的检测与控制算法的实现。
还将对系统的性能进行测试与分析,以验证其调速效果及稳定性。
本文将总结基于51单片机的PWM直流电机调速系统的优点与不足,并提出改进建议。
希望通过本文的阐述,能为相关领域的研究与应用提供有益参考。
二、51单片机基础知识51单片机,也被称为8051微控制器,是Intel公司在1980年代初推出的一种8位CISC(复杂指令集计算机)单片机。
尽管Intel公司已经停止生产这种芯片,但由于其架构的通用性和广泛的应用,许多其他公司如Atmel、STC等仍然在生产与8051兼容的单片机。
51单片机的核心部分包括一个8位的CPU,以及4KB的ROM、低128B 的RAM和高位的SFR(特殊功能寄存器)等。
它还包括两个16位的定时/计数器,四个8位的I/O端口,一个全双工的串行通信口,以及一个中断系统。
这些功能使得51单片机在多种嵌入式系统中得到了广泛的应用。
在PWM(脉冲宽度调制)直流电机调速系统中,51单片机的主要作用是生成PWM信号以控制电机的速度。
这通常是通过定时/计数器来实现的。
定时/计数器可以设置一定的时间间隔,然后在这个时间间隔内,CPU可以控制I/O端口产生高电平或低电平,从而形成PWM信号。
基于PID控制的直流电机调速系统1绪论1.1本课程的选题背景PID控制器(按闭环系统误差的比例、积分和微分进行控制的调节器)自30年代末期出现以来,在工业控制领域得到了很大的发展和广泛的应用。
它的结构简单,参数易于调整,在长期应用中已积累了丰富的经验。
特别是在工业过程控制中,由于被控制对象的精确的数学模型难以建立,系统的参数经常发生变化,运用控制理论分析综合不仅要耗费很大代价,而且难以得到预期的控制效果。
在应用计算机实现控制的系统中,PID很容易通过编制计算机语言实现。
由于软件系统的灵活性,PID算法可以得到修正和完善,从而使数字PID具有很大的灵活性和适用性,其中数字PID控制器是由软件编程在计算机内部实现的。
PWM控制的基本原理很早就已经提出,但是受电力电子器件发展水平的制约,在上世纪80年代以前一直未能实现。
直到进入上世纪80年代,随着全控型电力电子器件的出现和迅速发展,PWM控制技术才真正得到应用。
随着电力电子技术、微电子技术和自动控制技术的发展以及各种新的理论方法,如现代控制理论、非线性系统控制思想的应用,PWM控制技术获得了空前的发展。
到目前为止,已经出现了多种PWM控制技术。
PWM控制技术以其控制简单、灵活和动态响应好的优点而成为电力电子技术最广泛应用的控制方式,也是人们研究的热点。
由于当今科学技术的发展已经没有了学科之间的界限,结合现代控制理论思想或实现无谐振软开关技术将会成为PWM控制技术发展的主要方向之一。
在电机控制系统开发中,常常需要消耗各种硬件资源,系统构建时间长,而在调试时很难对硬件系统进行修改,从而延长开发周期。
随着计算机仿真技术的出现和发展,可用计算机对电机控制系统进行仿真,从而减小系统开发开支和周期。
计算机仿真可分为整体仿真和实时仿真。
整体仿真是对系统各个时间段对各个对象进行计算和分析,从而对各个对象的变化情况有直观的整体的了解,即能对系统进行精确的预测,如Proteus就是一个典型的实时仿真软件。