基本气动回路
- 格式:doc
- 大小:767.81 KB
- 文档页数:12
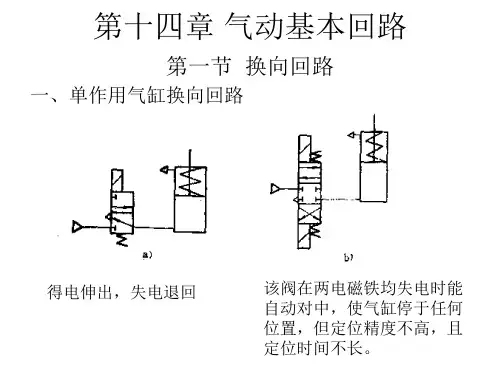
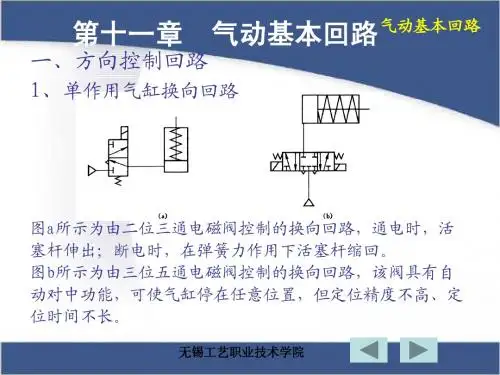
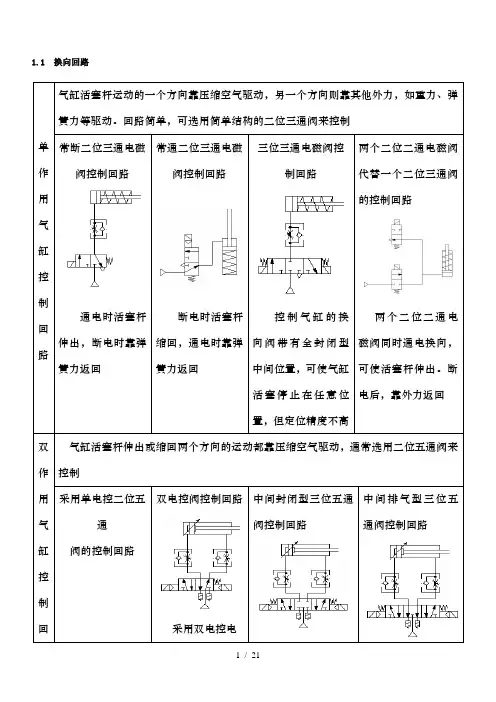
1.1 换向回路单作用气缸控制回路气缸活塞杆运动的一个方向靠压缩空气驱动,另一个方向则靠其他外力,如重力、弹簧力等驱动。
回路简单,可选用简单结构的二位三通阀来控制常断二位三通电磁阀控制回路通电时活塞杆伸出,断电时靠弹簧力返回常通二位三通电磁阀控制回路断电时活塞杆缩回,通电时靠弹簧力返回三位三通电磁阀控制回路控制气缸的换向阀带有全封闭型中间位置,可使气缸活塞停止在任意位置,但定位精度不高两个二位二通电磁阀代替一个二位三通阀的控制回路两个二位二通电磁阀同时通电换向,可使活塞杆伸出。
断电后,靠外力返回双作用气缸控制回气缸活塞杆伸出或缩回两个方向的运动都靠压缩空气驱动,通常选用二位五通阀来控制采用单电控二位五通阀的控制回路双电控阀控制回路采用双电控电中间封闭型三位五通阀控制回路中间排气型三位五通阀控制回路路通电时活塞杆伸出,断电时活塞杆返回磁阀,换向信号可以为短脉冲信号,因此电磁铁发热少,并具有断电保持功能左侧电磁铁通电时,活塞杆伸出。
右侧电磁铁通电时,活塞杆缩回。
左、右两侧电磁铁同时断电时,活塞可停止在任意位置,但定位精度不高当电磁阀处于中间位置时活塞杆处于自由状态,可由其他机构驱动中间加压型三位阀控制回路电磁远程控制回路采用二位五通气控阀作为主控阀,其先导控制压力用一个二位三通电磁阀进行远程控制。
该回路可以应用于有防爆等要求的特殊场合双气控阀控制回路主控阀为双气控二位五通阀,用两个二位三通阀作为主控阀的先导阀,可进行遥控操作当左、右两侧电磁铁同时断电时,活塞可停止在任何位置,但定位精度不高。
采用一个压力控制阀,调节无杆腔的压力,使得在活塞双向加压时,保持力的平衡采用带有双活塞杆的气缸,使活塞两端受压面积相等,当双向加压时,也可保持力的平衡双作用气缸控制回路采用两个二位三通阀的控制回路采用一个二位三通阀的差动回路带有自保回路的气动控制回路两个二位二通阀分别控制气缸运动的二位四(五)通阀和二位二通阀串接的控制回路两个二位三通阀中,一个为常通阀,另一个为常断阀,两个电磁阀同时动作可实现气缸换向气缸右腔始终充满压缩空气,接通电磁阀后,左腔进气,靠压差推动活塞杆伸出,动作比较平稳,断电后,活塞自动复位两个方向。
气动基本回路气动常用回路气动基本回路是指通过气动元件和管路构成的气动系统中的基本回路。
气动常用回路是指在工业自动化控制系统中经常使用的一些气动回路。
本文将介绍气动基本回路和气动常用回路的一些概念和应用。
气动基本回路主要包括气源回路、执行回路和控制回路。
气源回路是指气动系统中提供压缩空气的部分,通常包括压缩空气发生器、气源处理装置和储气设备。
执行回路是指通过气动执行元件来实现机械运动的部分,通常包括气缸和气动执行阀等。
控制回路是指用来控制执行元件的控制系统,通常包括开关、传感器和控制阀等。
气动常用回路包括单向气缸回路、双向气缸回路、速度控制回路、位置控制回路、压力控制回路等。
单向气缸回路是指通过一个气缸来实现单个工作机构的运动控制,常用于一些简单的工作场合。
双向气缸回路是指通过两个气缸来实现工作机构的正反转运动控制,常用于一些需要双向运动的工作场合。
速度控制回路是通过调节气缸的进气量来实现对气缸运动速度的控制,常用于一些对速度要求较高的工作场合。
位置控制回路是通过使用位置传感器来检测工作机构的位置,并通过控制阀来调节气缸的进气量,从而实现对工作机构位置的控制。
压力控制回路是通过使用压力传感器来检测气缸的压力,并通过控制阀来调节气缸的进气量,从而实现对气缸压力的控制。
气动基本回路和气动常用回路在工业自动化控制系统中具有广泛的应用。
其优点包括响应速度快、动力强、结构简单、成本低廉等。
因此,在许多工业领域中,气动系统被广泛应用于各种自动化生产线、机械设备和工艺控制系统中。
气动基本回路和气动常用回路是工业自动化控制系统中常用的回路类型。
通过对气源回路、执行回路和控制回路的合理设计和配置,可以实现对工作机构的运动控制、速度控制、位置控制和压力控制等功能。
气动系统具有快速响应、动力强大、结构简单、成本低廉等优点,因此在工业领域中具有广泛的应用前景。
1.1 换向回路单作用气缸控制回路气缸活塞杆运动的一个方向靠压缩空气驱动,另一个方向则靠其他外力,如重力、弹簧力等驱动。
回路简单,可选用简单结构的二位三通阀来控制常断二位三通电磁阀控制回路通电时活塞杆伸出,断电时靠弹簧力返回常通二位三通电磁阀控制回路断电时活塞杆缩回,通电时靠弹簧力返回三位三通电磁阀控制回路控制气缸的换向阀带有全封闭型中间位置,可使气缸活塞停止在任意位置,但定位精度不高两个二位二通电磁阀代替一个二位三通阀的控制回路两个二位二通电磁阀同时通电换向,可使活塞杆伸出。
断电后,靠外力返回双作用气缸控制回路气缸活塞杆伸出或缩回两个方向的运动都靠压缩空气驱动,通常选用二位五通阀来控制采用单电控二位五通阀的控制回路通电时活塞杆伸出,断电时活塞杆返回双电控阀控制回路采用双电控电磁阀,换向信号可以为短脉冲信号,因此电磁铁发热少,并具有断电保持功能中间封闭型三位五通阀控制回路左侧电磁铁通电时,活塞杆伸出。
右侧电磁铁通电时,活塞杆缩回。
左、右两侧电磁铁同时断电时,活塞可停止在任意位置,但定位精度不高中间排气型三位五通阀控制回路当电磁阀处于中间位置时活塞杆处于自由状态,可由其他机构驱动中间加压型三位阀控制回路电磁远程控制回路采用二位五通气控阀作为主控阀,其先导控制压力用一个二位三通电磁阀进行远程控制。
该回路可以应用于有防爆等要求的特殊场合双气控阀控制回路当左、右两侧电磁铁同时断电时,活塞可停止在任何位置,但定位精度不高。
采用一个压力控制阀,调节无杆腔的压力,使得在活塞双向加压时,保持力的平衡采用带有双活塞杆的气缸,使活塞两端受压面积相等,当双向加压时,也可保持力的平衡主控阀为双气控二位五通阀,用两个二位三通阀作为主控阀的先导阀,可进行遥控操作双作用气缸控制回路采用两个二位三通阀的控制回路两个二位三通阀中,一个为常通阀,另一个为常断阀,两个电磁阀同时动作可实现气缸换向采用一个二位三通阀的差动回路气缸右腔始终充满压缩空气,接通电磁阀后,左腔进气,靠压差推动活塞杆伸出,动作比较平稳,断电后,活塞自动复位带有自保回路的气动控制回路两个二位二通阀分别控制气缸运动的两个方向。
图示位置为气缸右腔进气。
如将阀2按下,由气孔管路向阀右端供气,使二位五通阀切换,则气缸左腔进气,右腔排气,同时自保回路a、b、c也从阀的右端增加气压,以防中途气阀2失灵,阀芯被弹簧弹回,自动换向,造成误动作(即自保作用)。
再将阀2复位,按下阀1,二位五通阀右端压气排出,则阀芯靠弹簧复位,节能型切换,开始下一次循环二位四(五)通阀和二位二通阀串接的控制回路二位五通阀起换向作用,两个二位二通阀同时动作,可保证活塞停止在任意位置。
当没有合适的三位阀时,可用此回路代替1.2 速度控制回路单作用气缸的速度控制回路采用两个速度控制阀串联,用进气节流和排气节流分别控制活塞两个方向运动的速度直接将节流阀安装在换向阀的进气口与排气口,可分别可控制活塞两个方向运动的速度利用快速排气阀的双速驱动回路为快速返回回路。
活塞伸出时为进气节流速度控制,返回时空气通过快速排气阀直接排至大气中,实现快速返回单作用气缸的速度控制回路采用单向节流阀的速度控制回路在气缸两个气口分别安装一个单向节流阀,活塞两个方向的运动分别通过每个单向节流阀调节。
常采用排气节流型单向节流阀采用排气节流阀的速度控制回路采用二位四通(五通)阀,在阀的两个排气口分别安装节流阀,实现排气节流速度控制,方法比较简单快速返回回路活塞杆伸出时,利用单向节流阀调节速度,返回时通过快速排气阀排气,实现快速返回双作用气缸的速度控制回路高速动作回路在气缸的进(排)气口附近两个管路中均装有快速排气阀,使气缸活塞运动加速中间变速回路用两个二位二通阀与速度控制阀并联,可以控制活塞在运动中任意位置发出信号,使背压腔气体通过二位二通阀直接排出到大气中,改变气缸的运动速度利用电/气比例节流阀的速度控制回路可实现气缸的无级调速。
当三通电磁阀2通电时,给电气比例节流阀1输入电信号,使气缸前进。
当三通电磁阀2断电时,利用电信号设定电气比例阀1的节流阀开度,使气缸以设定的速度后退。
阀1和阀2应同时动作,以防止气缸启动“冲出”1.3 压力、力矩与力控制回路压力控制回路气动系统中,压力控制不仅是维持系统正常工作所必需的,而且也关系到系统总的经济性、安全性及可靠性。
作为压力控制方法,可分为一次压力(气源压力)控制、二次压力(系统工作压力)控制、双压驱动、多级压力控制、增压控制等一次压力控制回路控制气罐使其压力不超过规定压力。
常采用外控制式溢流阀1来控制,也可用带电触点的压力表2代替溢流阀1来控制压缩机电机的动、停,从而使气罐内压力保持在规定范围内。
采用安全阀结构简单,工作可靠,但无功耗气量大;二后者对电机及其控制有要求二次压力控制回路利用气动三联件中的溢流式减压阀控制气动系统的工作压力采用差压操作,可以减少空气消耗量,并减少冲击差压回路采用单向减压阀的差压回路(a) 当活塞杆伸出时为高压,返回时空气通过减压阀减压与图a原理一样,只是用快速排气阀代替单向节流阀与图a比较,只是减压阀安装在换向阀之前,减压阀的工作要求较高,而省去单向节流阀气缸活塞一端通过减压阀供给一定的压力,另外安装卸荷阀做排气用限压回路启动按钮1作用后,活塞开始伸出,挡块遇行程阀2后,换向阀3使活塞返回。
但如果在前进中遇到大的阻碍,气缸左腔压力增高,顺序阀5动作,打开二位二通阀4排气,活塞自动返回气源经过调压阀1与2可调出两种不同的压力,通过换向阀3可得两种不同的压力输出压力控制回路多级压力控制采用远程调压阀的多级压力控制回路远程调压阀的先导压力通过三通电磁阀1的切换来控制,看根据需要设定低、中、高三种先导压力。
在进行压力切换时,必须用电磁阀2现将先导压力泄压,然后再选择新的先导压力采用比例调压阀的无级压力控制回路采用一个小型的比例压力阀作为先导压力控制阀可实现压力的无级控制。
比例压力阀的入口应使用一个微雾分离器,防止油雾和杂质进入比例阀,影响阀的性能和使用寿命增压回路当二位五通电磁阀1通电时,气缸实现增压驱动;当电磁阀1断电时,气缸在正常压力作用下返回当二位五通电磁阀1通电时,利用气控信号使住换向阀切换,进行增压驱动;电磁阀1断电时,气缸在正常压力作用下返回使用气\液增压缸的增压回路\当三通电磁阀3、4通电时,气/液缸6在与气压相同的油压作用下伸出;当需要大输出力时,则使五通电磁阀2通电,让气/液增压缸1动作,实现气/液缸的增压驱动。
让五通电磁阀2和三通电磁阀3、4断电时,则可使气/液返回。
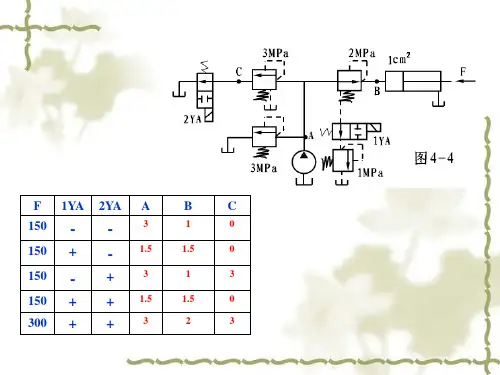
气/液增压缸1的输出可通过减压阀5进行设定串联气缸增力回路三段活塞缸串联,工作行程时,电磁换向阀通电,A、B、C进气,使活塞杆增力推出。
复位时,电磁阀断电,气缸右端口D进气,把杆拉回压力控制回路压力控制顺序回路为完成A1、B1、A0、B0顺序动作的回路,启动按钮1动作后,换向阀2换向,A缸左腔压力增高,顺序阀4动作,推动阀3换向,B缸活塞杆伸出完成B1动作,同时使阀2换向完成A0动作;最后A缸右腔压力增高,顺序阀5动作,使阀3换向完成B0动作。
此处顺序阀4及5调整至一定压力后动作力矩控制回路气马达是产生力矩的气动执行元件。
叶片式气马达是依靠叶片使转子高速旋转,经齿轮减速而输出力矩,借助于速度控制改变离心力而控制力矩,其回路就是一般的速度控制回路。
活塞式气马达和摆动马达则是通过改变压力来控制扭矩的。
下面介绍活塞式气马达的力矩控制回路气马达的力矩控制回路活塞式气马达经马达内装的分配器向大气排气,转速—高则排气受节流而力矩下降。
力矩控制一般通过控制供气压力实现摆动马达的力矩控制回路应该注意的是,若在停止过程中负载具有较大的惯性力矩,则摆动马达还必须使用挡块定位力控制回路冲击气缸的典型力控制回路该回路由冲击气缸4、快速供给气压的气罐1、把气缸背压快速排入大气的快速排气阀3及控制气缸换向的二位五通阀2组成。
当电磁阀得电时,冲击气缸的排气侧快速排出大气,同时使二位三通阀换向,气罐内的压缩空气直接流入冲击气缸,使活塞以极高的速度向下运动,该活塞所具有的动能给出很大的冲击力。
冲击力与活塞的速度平方成正比,而活塞的速度取决于气罐流入冲击气缸的空气流量。
为此,调节速必须调节气罐的压力1.4 位置控制回路气缸通常只能保持在伸出和缩回两个位置。
如果要求气缸在运动过程中的某个中间位置停下来,则要求气动系统具有位置控制功能。
由于气体具有压缩性,因此只利用三位五通电磁阀对气缸两腔进行给、排气控制的纯气动方法,难以得到高精度的位置控制。
对于定位精度要求较高的场合,应采用机械辅助定位或气/液转换器等控制方法利用外部挡块的定位方法在定位点设置机械挡块,是使气缸在行程中间定位的最可靠方法,定位精度取决于机械挡块的设置S精度。
这种方法的缺点是定位点的调整比较困难,挡块与气缸之间应考虑缓冲的问题采用三位五通阀的位置控制回路采用中位加压型三位五通阀可实现气缸的位置控制,但位置控制精度不高,容易受负载变化的影响使用串联气缸的三位置控制回路(轻负载时)图示位置为两缸的活塞杆均处于缩进状态,当阀2如图示位置,而阀1通电换向时,A缸活塞杆向左推动B缸活塞杆,其行程为I—II。
反之,当阀1如图示状态而阀2通电切换时,缸B活塞杆杆端由位置II继续前进到III(因缸B行程为I—III)。
此外,可在两缸端盖上f处于活塞杆平行安装调节螺钉,以相应地控制行程位置,使缸B活塞杆可停留在I—II、II—III之间的所需位置采用全气控方式的四位置控制回路图示位置为按动手控阀1时,压缩空气通过手控阀1,分两路由梭阀5、6控制两个二位五通阀,使主气源进入多位缸而得到位置I。
此外,当按动手动阀2、3或4时,同时可相应得到位置II、III或IV利用制动气缸的位置控制回路如果制动装置为气压制动型,气源压力应在0.1Mpa以上;如果为弹簧+气压制动型,气源压力应在0.35Mpa以上。
气缸制动后,活塞两侧应处于力平衡状态,防止制动解除时活塞杆飞出,为此设置了减压阀1。
解除制动信号应超前于气缸的往复信号或同时出现制动装置为双作用型,即卡紧和松开都通过气压来驱动。
采用中位加压型三位五通阀控制气缸的伸出与缩回带垂直负载的制动气缸位置控制回路带垂直负载时,为防止突然断气时工件掉下,应采用弹簧+气压制动型或弹簧制动型制动装置垂直负载向上时,为了使制动后活塞两侧处于力平衡状态,减压阀4应设置在气缸有杆腔侧使用气/液转换器的位置控制回路通过气/液转换器,利用气体压力推动液压缸运动,可以获得较高的定位精度,但在一定程度上要牺牲运动速度通过气/液转换器,利用气体压力推动摆动液压缸运动,可以获得较高的中间定位精度2.1 同步回路同步控制是指驱动两个或多个执行元件时,使他们在运动过程中位置保持同步。