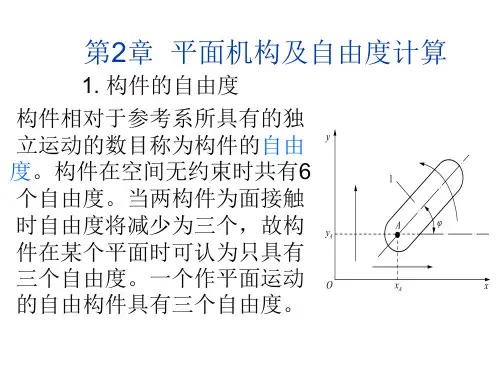
第二章 机构的组成及自由度计算
- 格式:ppt
- 大小:1.98 MB
- 文档页数:44



第二章机构运动简图及平面机构自由度主讲:张祖涛机械设计教研室2314567,8实际工程设计问题一:优化设计汽车发动机使汽车油耗降低?通过机构运动图简化,抛开与运动无关的复杂外形,用简单的线条和标准化的符号,按照一定的比例,绘制机构的运动简图,以便于后续的优化设计!!机构运动简图C AB C DD工业设计问题二:分析简单四足步行机器人的运动?简单四足步行机器人1234平面机构自由度计算第二章机构运动简图与自由度§1 机构运动简图§2 平面机构自由度§1 机构运动简图一、机构的组成机构——若干构件以运动副相联接并具有相对运动的组合体。
构件运动副§1 机构运动简图术语:运动副由两个构件组成的可动联接。
运动副低副高副——点、线接触的运动副其他:空间运动副回转副移动副根据运动副两接触面情况不同,常如下分类:球面副n低副——面接触a )回转副(铰链)——相对转动§1 机构运动简图b )移动副——相对移动o高副——点、线接触零件构件静联接机构动联接机器协调组合2314567,8二、机构运动简图1、机构运动简图功用对现有机器进行运动分析和受力分析。
新机器的方案设计、方案比较及主要参数的确定。
§1 机构运动简图机构运动简图机构运动简图:用简单线条、符号表达用简单的线条和符号等代表构件和运动副,并按照一定比例表示各种运动副的相对位置,保持原机构运动特征不变的图形,用于表达复杂机械中各构件的相互联系、运动特性。
机构运动简图中常用的符号:2、机械运动简图作图方法1)、分析机构的运动情况,辨别构件的类型(固定件、原动件和从动,并在构件上标上编号;2)、分析各构件的相对运动性质,确定运动副的种类和数目;3)、确定回转副转动中心位置和移动副中心线位置,选定适当的比例尺,绘出机构运动简图;4)、检查运动的可能性和确定性请画出图示缝纫机下针机构的机构运动简图§1 机构运动简图§1 机构运动简图例:鳄式破碎机1.构件:机架1,偏心轴2,动鳄3,衬板42.运动副:1—2:转动副;2—3:转动副;3—4:转动副;4—1:转动副。
第二章机构的组成及其自由度的计算一、学习要求1.搞清构件、运动副、约束、自由度及运动链等重要概念。
2.能绘制比较简单的机械的机构运动简图。
3.能正确计算平面机构的自由度并能判断其是否具有确定的运动。
4.对虚约束对机构工作性能的影响有所认识。
二、本章重点及难点本章的重点是构件、运动副、运动链等的概念,机构运动简图的绘制,机构具有确定运动的条件及机构自由度的计算。
本章的难点是机构中虚约束的判定问题。
三、思考题1.何谓构件?构件与零件有何区别?2.何谓高副?何谓低副?在平面机构中高副和低副一般各带入几个约束?齿轮副的约束数应如何确定?3.何谓运动链?运动链与机构有何联系和区别?4.何谓机构运动简图?它与机构示意图有何区别?绘制机构运动简图的目的和意义是什么?绘制机构运动简图的主要步骤如何?5.何谓机构的自由度?在计算平面机构的自由度时应注意哪些问题?6.什么是虚约束?虚约束对机构有哪些重要影响?7.机构具有确定运动的条件是什么?该条件是在什么前提下获得的?若不满足这一条件,机构将会出现什么情况?四、练习题2-1 试画出图2-1所示泵机构的机构运动简图,并计算其自由度。
2-2 试画出图2-2所示冲压机构的机构运动简图,并判断其是否有确定的相对运动。
2-3 试计算图2-3所示凸轮-连杆组合机构的自由度。
2-4 试确定图2-4所示机构的自由度。
图2-1 图2-2图2-3图2-42-5 图2-5所示为一小型压力机,试绘制其机构运动简图,并计算其自由度。
图2-52-6 试计算图2-6中所示两种压力机的自由度。
图2-62-7 试计算图2-7中所示凸轮-连杆组合机构的自由度。
图2-72-8 试计算图2-8中所示各平面高副机构的自由度。
a) b)图2-13。