神经网络_第三章:感知器
- 格式:ppt
- 大小:494.50 KB
- 文档页数:23
人工神经网络学习总结笔记主要侧重点:1.概念清晰2.进行必要的查询时能从书本上找到答案第一章:绪论1.1人工神经网络的概述“认识脑”和“仿脑”:人工智能科学家在了解人脑的工作机理和思维的本质的基础上,探索具有人类智慧的人工智能系统,以模拟延伸和扩展脑功能。
我认为这是人工神经网络研究的前身。
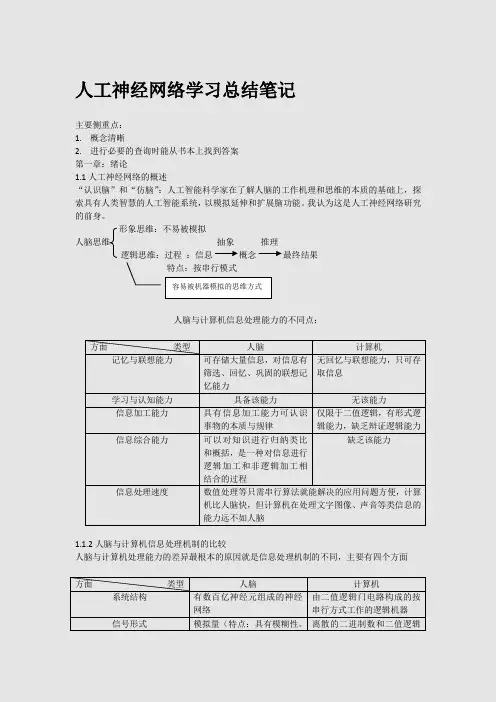
形象思维:不易被模拟人脑思维抽象推理逻辑思维:过程:信息概念最终结果特点:按串行模式人脑与计算机信息处理能力的不同点:方面类型人脑计算机记忆与联想能力可存储大量信息,对信息有筛选、回忆、巩固的联想记忆能力无回忆与联想能力,只可存取信息学习与认知能力具备该能力无该能力信息加工能力具有信息加工能力可认识事物的本质与规律仅限于二值逻辑,有形式逻辑能力,缺乏辩证逻辑能力信息综合能力可以对知识进行归纳类比和概括,是一种对信息进行逻辑加工和非逻辑加工相结合的过程缺乏该能力信息处理速度数值处理等只需串行算法就能解决的应用问题方便,计算机比人脑快,但计算机在处理文字图像、声音等类信息的能力远不如人脑1.1.2人脑与计算机信息处理机制的比较人脑与计算机处理能力的差异最根本的原因就是信息处理机制的不同,主要有四个方面方面类型人脑计算机系统结构有数百亿神经元组成的神经网络由二值逻辑门电路构成的按串行方式工作的逻辑机器信号形式模拟量(特点:具有模糊性。
离散的二进制数和二值逻辑容易被机器模拟的思维方式难以被机器模拟)和脉冲两种形式形式信息储存人脑中的信息分布存储于整个系统,所存储的信息是联想式的有限集中的串行处理机制信息处理机制高度并行的非线性信息处理系统(体现在结构上、信息存储上、信息处理的运行过程中)1.1.3人工神经网络的概念:在对人脑神经网络的基本认识的基础上,用数理方法从信息处理的角度对人脑神经网络进行抽象,并建立某种简化模型,称之为人工神经网络,是对人脑的简化、抽象以及模拟,是一种旨在模仿人脑结构及其功能的信息处理系统。
其他定义:由非常多个非常简单的处理单元彼此按某种方式相互连接而形成的计算系统,外部输入信息之后,系统产生动态响应从而处理信息。
感知器神经网络感知器是一种前馈人工神经网络,是人工神经网络中的一种典型结构。
感知器具有分层结构,信息从输入层进入网络,逐层向前传递至输出层。
根据感知器神经元变换函数、隐层数以及权值调整规则的不同,可以形成具有各种功能特点的人工神经网络。
本节将介绍单层感知器和多层感知器的工作原理。
5.3.1单层感知器1958年,美国心理学家Frank Rosenblatt 提出一种具有单层计算单元的神经网络,称为Perceptron ,即感知器。
感知器是模拟人的视觉接受环境信息,并由神经冲动进行信息传递的层次型神经网络。
感知器研究中首次提出了自组织、自学习的思想,而且对所能解决的问题存在着收敛算法,并能从数学上严格证明,因而对神经网络研究起了重要推动作用。
单层感知器的结构与功能都非常简单,以至于在解决实际问题时很少采用,但由于它在神经网络研究中具有重要意义,是研究其它网络的基础,而且较易学习和理解,适合于作为学习神经网络的起点。
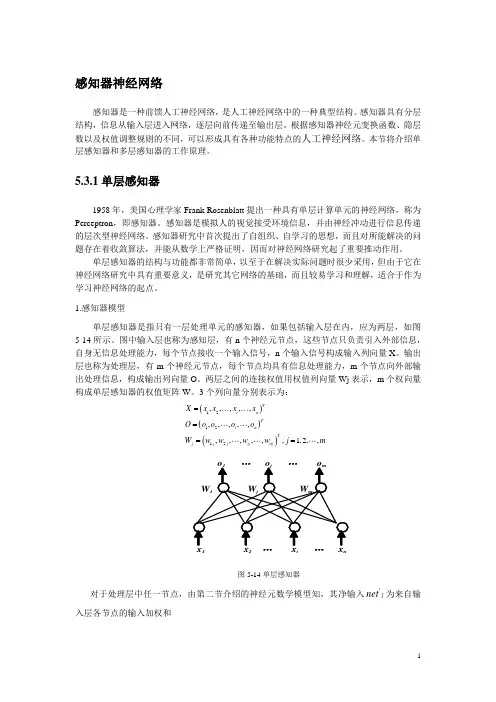
1.感知器模型单层感知器是指只有一层处理单元的感知器,如果包括输入层在内,应为两层,如图5-14所示。
图中输入层也称为感知层,有n 个神经元节点,这些节点只负责引入外部信息,自身无信息处理能力,每个节点接收一个输入信号,n 个输入信号构成输入列向量X 。
输出层也称为处理层,有m 个神经元节点,每个节点均具有信息处理能力,m 个节点向外部输出处理信息,构成输出列向量O 。
两层之间的连接权值用权值列向量Wj 表示,m 个权向量构成单层感知器的权值矩阵W 。
3个列向量分别表示为:()()()121212,,,,,,,,,,,,,,,,1,2,,T i n Ti n Tj j j ij nj X x x x x O o o o o W w w w w j m====图5-14单层感知器对于处理层中任一节点,由第二节介绍的神经元数学模型知,其净输入j net '为来自输入层各节点的输入加权和∑==ni i ij j x w net 1'(5-26)输出o j 为节点净输入与阈值之差的函数,离散型单计算层感知器的转移函数一般采用符号函数。
神经网络的学习名词解释神经网络是一种模拟人脑神经系统功能的计算模型,通过大量的节点(或称为神经元)之间的连接,实现信息的传递和处理。
随着机器学习和人工智能的发展,神经网络逐渐成为重要的工具,被广泛应用于图像识别、自然语言处理等领域。
本文将介绍神经网络中常见的学习名词,并对其进行解释。
1. 感知器(Perceptron):感知器是神经网络中最基本的模型,模拟了人脑中的神经元。
它接收多个输入,并通过一个激活函数产生输出。
感知器的学习过程是通过调整连接权重来使感知器输出逼近期望输出。
2. 前馈神经网络(Feedforward Neural Network):前馈神经网络是一种直接将数据从输入层传输到输出层的网络结构。
每个神经元只与下一层的神经元连接,信息只能向前传递,不能产生回路。
前馈神经网络的训练过程主要通过反向传播算法来调整网络的权重,以达到期望的输出。
3. 反向传播算法(Backpropagation):反向传播算法是神经网络中最常用的训练算法。
它通过计算权重的梯度,不断调整网络的连接权重,使网络的输出逼近期望的输出。
反向传播算法主要分为前向传播和误差反向传播两个过程,前向传播计算各层的输出,而误差反向传播则从输出层开始,逐层计算误差并反向传播到输入层。
4. 激活函数(Activation Function):激活函数决定了神经元输出的形式,常见的激活函数有Sigmoid、ReLU、Tanh 等。
激活函数引入非线性因素,使神经网络具有非线性表示能力。
它们的选择在神经网络的性能和收敛速度中起着重要的作用。
5. 损失函数(Loss Function):损失函数是用来衡量网络输出与期望输出之间的差异。
在训练过程中,通过最小化损失函数来调整网络的参数,以达到更准确的预测结果。
常见的损失函数有均方误差(MSE)、交叉熵等。
6. 优化算法(Optimization Algorithm):优化算法用来求解损失函数最小化的问题。
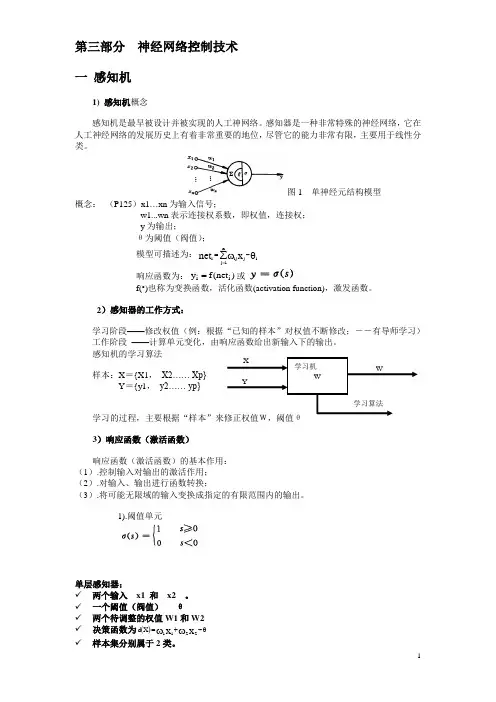
第三部分 神经网络控制技术一 感知机1) 感知机概念感知机是最早被设计并被实现的人工神网络。
感知器是一种非常特殊的神经网络,它在人工神经网络的发展历史上有着非常重要的地位,尽管它的能力非常有限,主要用于线性分类。
图1 单神经元结构模型概念: (P125)x1…xn 为输入信号;w1...wn 表示连接权系数,即权值,连接权; y 为输出;θ为阈值(阀值); 模型可描述为:θ∑ω-==i n1j j ij i x net响应函数为:)net (f y i i =或f(•)也称为变换函数,活化函数(activation function),激发函数。
2)感知器的工作方式:学习阶段——修改权值(例:根据“已知的样本”对权值不断修改;――有导师学习) 工作阶段 ——计算单元变化,由响应函数给出新输入下的输出。
感知机的学习算法样本:X ={X1, X2…… Xp}Y ={y1, y2…… yp}3)响应函数(激活函数)响应函数(激活函数)的基本作用: (1).控制输入对输出的激活作用; (2).对输入、输出进行函数转换;(3).将可能无限域的输入变换成指定的有限范围内的输出。
1).阈值单元单层感知器:✓ 两个输入 x1 和 x2 。
✓ 一个阈值(阀值) θ✓ 两个待调整的权值W1和W2 ✓ 决策函数为()θ-+=ωωx x 2211X d ✓ 样本集分别属于2类。
4)工作阶段理解的例题x 1为考试成绩、x 2为平时成绩,将x 1、x 2作为两个输入,构建两输入、单输出的感知机实现练习2设一平面上有两类点,使用横坐标x 1和纵坐标x 2作为两个输入,构建两输入、单输出的感知器的建立:学习阶段——修改权值(例:根据“已知的样本”对权值不断修改;――有导师学习) 工作阶段 ——计算单元变化,由响应函数给出新输入下的输出。
01算法步骤:1)设输入变量为x1,x2…,xm;(j=1 ,2,…,m),设置权系数初值wj(wj一般取[-1,1]之间的随机小数);2)确定学习样本,即给定输入/输出样本对,输入:u={u1,u2……un},⎪⎪⎪⎪⎭⎫ ⎝⎛=xmi i 2x i 1x ui ,(i=1,2,…,n)输出:d={d1,d2……dn}, (i=1,2,…,n)3)分别计算感知机在ui 作用下的输出yi ;⎪⎪⎭⎫ ⎝⎛ω=⎪⎪⎭⎫ ⎝⎛θ-ω=∑∑==n 0i i i n 1i i i i u )t (f u )t (f )t (yt 指第t 次计算并调整权值。
1.具体应用背景的介绍感知器是由美国计算机科学家罗森布拉特(F.Roseblatt)于1957年提出的。
感知器可谓是最早的人工神经网络。
单层感知器是一个具有一层神经元、采用阈值激活函数的前向网络。
通过对网络权值的训练,可以使感知器对一组输人矢量的响应达到元素为0或1的目标输出,从而实现对输人矢量分类的目的。
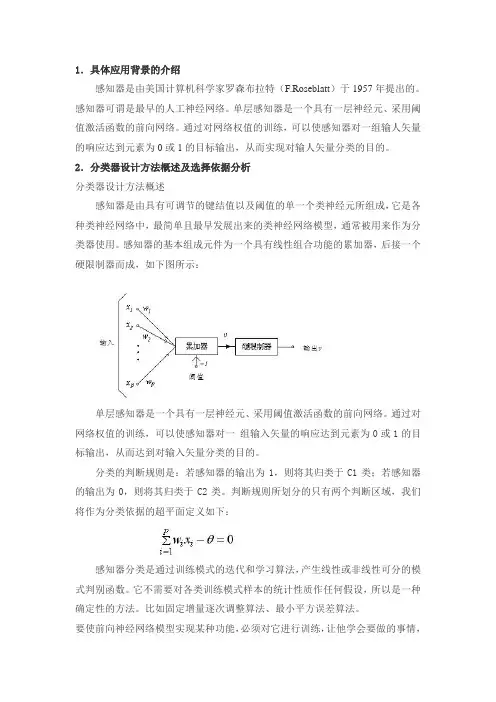
2.分类器设计方法概述及选择依据分析分类器设计方法概述感知器是由具有可调节的键结值以及阈值的单一个类神经元所组成,它是各种类神经网络中,最简单且最早发展出来的类神经网络模型,通常被用来作为分类器使用。
感知器的基本组成元件为一个具有线性组合功能的累加器,后接一个硬限制器而成,如下图所示:单层感知器是一个具有一层神经元、采用阈值激活函数的前向网络。
通过对网络权值的训练,可以使感知器对一组输入矢量的响应达到元素为0或1的目标输出,从而达到对输入矢量分类的目的。
分类的判断规则是:若感知器的输出为1,则将其归类于C1类;若感知器的输出为0,则将其归类于C2类。
判断规则所划分的只有两个判断区域,我们将作为分类依据的超平面定义如下:感知器分类是通过训练模式的迭代和学习算法,产生线性或非线性可分的模式判别函数。
它不需要对各类训练模式样本的统计性质作任何假设,所以是一种确定性的方法。
比如固定增量逐次调整算法、最小平方误差算法。
要使前向神经网络模型实现某种功能,必须对它进行训练,让他学会要做的事情,并把所学到的知识记忆在网络的权值中。
人工神经网络的权值的确定不是通过计算,而是通过网络自身的训练来完成的。
感知器的训练过程如下:在输入矢量X的作用下,计算网络的实际输出A 与相应的目标矢量T进行比较,检查A是否等于T,然后比较误差T-A,根据学习规则进行权值和偏差的调整;重新计算网络在新权值作用下的输入,重复权值调整过程,知道网络的输出A等于目标矢量T或训练次数达到事先设置的最大值时结束训练。
感知器设计训练的步骤如下:(1)对于所要解决的问题,确定输入矢量X,目标矢量T,并由此确定各矢量的维数以及确定网络结构大小的参数:r(表示输入矢量维数,神经元的权值向量维数),s(表示一个输入矢量所对应的输出矢量的维数,或者表示神经元个数),p(表示输入矢量组数,)。
神经网络基本原理神经网络是一种模仿人脑神经元网络结构和工作原理的人工智能模型。
它由大量的人工神经元组成,这些神经元通过连接形成复杂的网络,可以进行信息处理和学习。
神经网络的基本原理包括感知器、激活函数、前向传播、反向传播等重要概念。
感知器是神经网络的基本组成单元,它接收多个输入信号,并通过加权求和和激活函数的处理得到输出。
感知器的工作原理类似于人脑中的神经元,它对输入信号进行加权处理,并通过激活函数输出一个结果。
感知器可以用来构建更复杂的神经网络结构,实现对复杂信息的处理和学习。
激活函数是神经网络中非常重要的一部分,它决定了神经元的输出是否被激活。
常用的激活函数包括sigmoid函数、ReLU函数等,它们能够将输入信号转换为输出信号,并且具有非线性的特性,能够增加神经网络的表达能力。
前向传播是神经网络中信息传递的过程,输入信号经过感知器和激活函数的处理,最终得到输出结果。
在前向传播过程中,每个神经元都将上一层的输出作为输入,并进行加权求和和激活函数处理,然后传递给下一层神经元,直至得到最终的输出结果。
反向传播是神经网络中的学习算法,它通过计算输出结果与实际结果的误差,然后反向调整神经网络中每个连接的权重,以减小误差。
反向传播算法通过梯度下降的方法,不断调整神经网络中的参数,使得神经网络能够逐渐学习到输入和输出之间的映射关系。
神经网络基本原理的理解对于深度学习和人工智能领域的研究具有重要意义。
通过对神经网络的基本原理进行深入的学习和掌握,可以更好地理解神经网络的工作机制,设计更加高效和有效的神经网络模型,实现对复杂信息的处理和学习。
同时,神经网络基本原理的研究也为人工智能技术的发展提供了重要的理论基础,推动了人工智能技术的不断进步和发展。
总之,神经网络基本原理是人工智能领域的重要基础知识,它对于理解和应用神经网络模型具有重要意义。
通过对感知器、激活函数、前向传播、反向传播等基本概念的深入学习和掌握,可以更好地理解神经网络的工作原理,设计更加高效和有效的神经网络模型,推动人工智能技术的发展和应用。
神经网络中的感知器与多层感知器神经网络是一种模仿人类神经系统的信息处理系统,能够通过学习和自我适应来完成任务。
神经网络在图像识别、语音识别、自然语言处理等领域有着广泛的应用。
其中,感知器和多层感知器是神经网络中最基本的结构,本文将分别介绍它们的原理、应用和局限性。
一、感知器(Perceptron)感知器是神经网络的最基本单元,它基于线性分类模型,能够将输入数据进行分类。
感知器的构成由输入层、权值、偏移量、激活函数和输出层组成。
1、输入层:输入层是感知器的数据源,同时也是神经元的接收器,输入层的节点数决定了输入数据的维度。
2、权值:输入信号与感知器之间的连接是用权值来表示的,权值决定了输入节点的重要程度。
权值的调整也是感知器训练的核心。
3、偏移量:偏移量是一个常数,它与权值结合起来作为阈值判断的依据。
4、激活函数:激活函数是连接多个神经元之间的唯一方式,也是用于处理输入数据的函数,它将输入的信号进行处理后输出到输出层。
5、输出层:输出层的节点数决定了对数据进行分类的结果。
可以是二分类或多分类。
感知器的训练过程就是通过上面的结构来不停地调整每个输入节点的权值,从而不停地改进分类结果。
感知器的应用:感知器广泛应用于二元分类的问题中,例如数字识别和人脸识别。
感知器的局限性:但是,感知器有很大的局限性,例如无法处理非线性分类问题,只能进行两类问题的分类。
因此,需要使用多层感知器来解决这些问题。
二、多层感知器(Multi-Layer Perceptron, MLP)多层感知器是感知器的扩展,通过添加多个隐藏层使其可以处理非线性分类问题。
隐藏层的加入使得神经网络学习到了更加复杂的特征,并且可以解决分类问题。
多层感知器的结构与感知器相似,只是中间加入了隐藏层,隐藏层将原数据进行转换和处理,以得到更好的输入数据。
隐层和输出之间的连接仍然可以使用任何激活函数,例如Sigmoid函数。
多层感知器的训练过程和感知器类似,也是不断地调整权重来训练,但多层感知器的训练相较于单层感知器显得更加复杂,因为它需要在每个隐藏层之间做权值传导和梯度求导。
第4章感知器(Perceptron)感知器是由美国计算机科学家罗森布拉特(F.Roseblatt)于1957年提出的。
单层感知器神经元模型图:图4.1 感知器神经元模型F.Roseblatt已经证明,如果两类模式是线性可分的(指存在一个超平面将它们分开),则算法一定收敛。
感知器特别适用于简单的模式分类问题,也可用于基于模式分类的学习控制中。
本节中所说的感知器是指单层的感知器。
多层网络因为要用到后面将要介绍的反向传播法进行权值修正,所以把它们均归类为反向传播网络之中。
4.1 感知器的网络结构根据网络结构,可以写出第i个输出神经元(i=1,2,…,s)的加权输入和ni 及其输出ai为:感知器的输出值是通过测试加权输入和值落在阈值函数的左右来进行分类的,即有:阈值激活函数如图4.3所示。
4.2 感知器的图形解释由感知器的网络结构,我们可以看出感知器的基本功能是将输入矢量转化成0或1的输出。
这一功能可以通过在输人矢量空间里的作图来加以解释。
感知器权值参数的设计目的,就是根据学习法则设计一条W*P+b=0的轨迹,使其对输入矢量能够达到期望位置的划分。
以输入矢量r=2为例,对于选定的权值w1、w2和b,可以在以p1和p2分别作为横、纵坐标的输入平面内画出W*P+b=w1p1十w2p2十b=0的轨迹,它是一条直线,此直线上的及其线以上部分的所有p1、p2值均使w1p1十w2p2十b>0,这些点若通过由w1、w2和b构成的感知器则使其输出为1;该直线以下部分的点则使感知器的输出为0。
所以当采用感知器对不同的输入矢量进行期望输出为0或1的分类时,其问题可转化为:对于已知输入矢量在输入空间形成的不同点的位置,设计感知器的权值W和b,将由W*P+b=0的直线放置在适当的位置上使输入矢量按期望输出值进行上下分类。
图4.4 输入矢量平面图(此图横坐标有问题)4.3 感知器的学习规则学习规则是用来计算新的权值矩阵W及新的偏差B的算法。
Neural Networks & Application1第3章感知器神经网络z 单层感知器z 多层感知器z 基本BP 算法z 标准BP 算法的改进z 基于BP 算法的多层感知器设计基础z 基于BP 算法的多层感知器应用与设计实例z课件下载::8080/aiwebdrive/wdshare/getsh are.do?action=exhibition&theParam=liangjing@zzu.e Neural Networks & Application23.1 单层感知器z 1958年,美国心理学家Frank Rosenblatt 提出一种具有单层计算单元的神经网络,称为Perceptron, 及感知器。
z感知器研究中首次提出了自组织、自学习的思想,而且对于所能解决的问题存在着收敛算法,并能从数学上严格证明,因而对神经网络的研究起了重要推动作用。
z单层感知器的结构与功能都非常简单,所以在解决实际问题时很少被采用,但在神经网络研究中具有重要意义,是研究其他网络的基础,而且较易学习和理解,适合于作为学习神经网络的起点。
Neural Networks & Application33.1 单层感知器z3.1.1 感知器模型单层感知器:只有一层处理单元的感知器12(,,...,)Tm o o o =O 单层感知器输入层(感知层)输出层(处理层)12(,,...,)Tn x x x =X 12(,,...,),1,2,...,T j j nj w w w j m==j W Neural Networks & Application43.1 单层感知器对于处理层中任一节点,其净输入net ’j 为来自输入层各节点的输入加权和离散型单层感知器的变换函数一般采用符号函数1'nj ij ii net w x ==∑0sgn(')sgn()sgn()nT j j j ij i j i o net T w x ==−==∑W XNeural Networks & Application53.1 单层感知器z 3.1.2 感知器的功能z单计算节点感知器就是一个M-P 神经元模型,采取符号变换函数,又称为符号单元。