相位裕量和幅值裕量算法
- 格式:ppt
- 大小:1.05 MB
- 文档页数:12

幅值裕度和相角裕度计算幅值裕度和相角裕度计算,这可真是个有趣又烧脑的事儿啊。
我在实验室里研究控制系统的时候,就老得琢磨这俩玩意儿。
周围那些仪器啊,闪着小灯,嗡嗡响着,就像一群小虫子在叫。
我的搭档,是个眼睛小小的家伙,戴着个黑框眼镜,那镜片厚得像酒瓶底儿。
他拿着计算草稿,眉头皱得像麻花,嘟囔着:“这幅值裕度和相角裕度可真不好算呐。
”咱先说这幅值裕度计算。
这就像在走迷宫,得找到那个关键的出口。
你得先把开环传递函数搞清楚,那函数就像一团乱麻,得一点点梳理。
这函数里的参数啊,有的像调皮的小鬼,稍不注意就把你带偏了。
我们在计算的时候,拿着计算器按个不停,那计算器的按键声,哒哒哒的,就像小马蹄在跑。
有次我算着算着,算错了一个数,结果那数值差得离谱,我气得直拍脑袋,像个傻瓜一样。
相角裕度计算也不简单。
它和幅值裕度就像一对难兄难弟。
得先找到截止频率,这就像在大海里找一颗珍珠一样。
要画出伯德图,那伯德图的线啊,弯弯绕绕的,就像山路一样。
我拿着尺子在纸上比划着,想把线画准,眼睛都看花了。
我问搭档:“你看这线对不?” 他凑过来,眼睛瞪得老大,看了半天说:“好像不太对,再量量。
”这幅值裕度和相角裕度计算啊,得细心又细心。
要是算错了,那控制系统可就出大问题了,就像火车跑错了轨道一样。
不过呢,当你好不容易算对了,那种感觉就像打了胜仗一样,心里美美的。
而且这俩概念在实际中用处可大了,就像给控制系统上了保险,让它稳稳当当的,不会出乱子。
咱搞这行的,就得把这些计算吃透,就像老虎咬住猎物不松口一样,这样才能把控制系统设计得更好,让那些机器啊、设备啊都乖乖听话。
幅值裕量(Margin of Safety)是一种用于评估系统或结构的强度和安全性的指标。
它表示系统或结构在额定工作条件下的承载能力与实际工作条件下的需求之间的差距。
计算幅值裕量的公式可以根据具体的应用领域和问题而有所不同。
下面将介绍几种常见的幅值裕量计算公式。
1. 结构力学中的幅值裕量计算在结构力学中,幅值裕量通常用于评估材料的应力和变形情况。
其中一个常见的幅值裕量计算公式是:幅值裕量= (强度-应力) / 强度其中,强度表示材料的最大承载能力,应力表示材料在实际工作条件下的受力情况。
通过将应力值代入公式,可以计算出结构的幅值裕量,从而评估其安全性和可靠性。
2. 电气工程中的幅值裕量计算在电气工程中,幅值裕量通常用于评估电气设备的可靠性和安全性。
其中一个常见的幅值裕量计算公式是:幅值裕量= (设备的额定容量-实际负载) / 设备的额定容量其中,额定容量表示设备的最大工作能力,实际负载表示设备在实际工作条件下的负荷情况。
通过将实际负载值代入公式,可以计算出设备的幅值裕量,从而评估其工作状态和可靠性。
3. 消费品设计中的幅值裕量计算在消费品设计中,幅值裕量通常用于评估产品的安全性和可靠性。
其中一个常见的幅值裕量计算公式是:幅值裕量= (设计强度-预期负荷) / 预期负荷其中,设计强度表示产品设计的最大负荷能力,预期负荷表示产品在实际使用条件下的负荷情况。
通过将预期负荷值代入公式,可以计算出产品的幅值裕量,从而评估其安全性和可靠性。
需要注意的是,不同领域的幅值裕量计算公式可能略有差异,因此在具体应用时需要根据实际情况选择适合的计算公式。
此外,幅值裕量的计算结果仅供参考,实际应用中还需要综合考虑其他因素,如材料的可靠性、工艺的精度等,来评估系统或结构的安全性和可靠性。
最小相位系统中,即开环不稳定极点数P =0,奈氏曲线离(-1,j0)点越远,其相对稳 定性越好;反之,相对稳定性越差。
若奈氏曲线 穿过(-1,j0)点,则系统处于临界稳定状态。
在频率特性中用相位裕量和幅值裕量两个性能指标来衡量最小相位系统的相对稳定性。
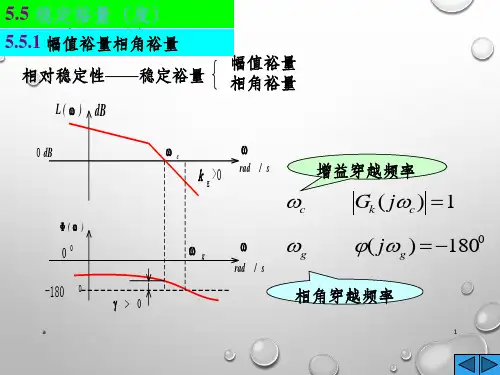
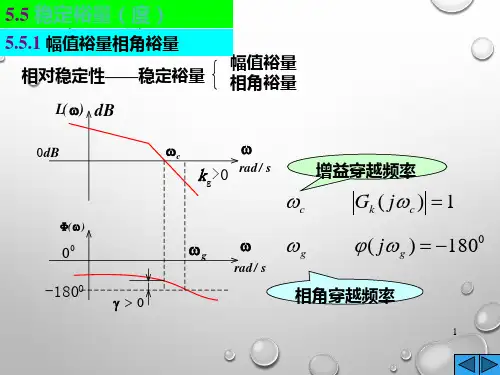
5-4 频域稳定裕度1、相位裕度 g定义:曲线上,模值为1的矢量和负实轴间的夹角。
) ( 180 c w j g + = o 截止频率 0 < g ,曲线包围(1,j0)点,闭环系统不稳定。
, 0 > g 闭环系统稳定。
g 越大,系统相对稳定性越好,一般取30°~60°。
1 - c w x w ) ( c w j )(x A w g c w x w ) (w j )(w L p - ww) ( x w j gh2、幅值裕量 h1 < h ,闭环系统不稳定。
, 1 > h 闭环系统稳定。
h>1时,h 越大,系统相对稳定性越好。
定义: 的倒数。
时, ) ( ) ( 180 ) ( x x x j H j G w w w j ° - = ) ( 1) ( ) ( 1 x x x A j H j G h w w w = = )( ) ( ) ( lg 20 ) ( dB j H j G dB h x x w w - = h(dB):对数幅值稳定裕度 1 - c w x w ) ( c w j )(x A w g c w x w ) (w j )(w L p - ww) ( x w j gh当 时,即 和 时,闭环系统是稳 定的;否则是不稳定的。
对于最小相位系统, 和 是同时发生或同时不发生的,所以经常只 用一种稳定裕度来表示系统的稳定裕度。
常用相角 裕度。
0 ) ( > dB h 1 ) ( < x A w 0 > g 0) ( > dB h 0 > g 1 - c w xw ) ( c w j ) ( x A w g c w x w ) (w j )(w L p - w w ) ( x w j gh比如,若增加开环放大系数K ,则对数幅频特性曲线将上升,而 相角特性曲线不变。
相位裕度和幅值裕度相位裕度和幅值裕度是电路稳定性分析中常用的两个概念。
相位裕度是指系统从稳定状态开始到产生滞后相位时所能承受的相位变化量,而幅值裕度则是指系统从稳定状态开始到产生失稳时所能承受的幅值变化量。
相位裕度和幅值裕度的概念源于控制系统理论,但在电路设计中也有着广泛的应用。
在电路设计中,相位裕度和幅值裕度是评估电路稳定性的两个重要指标,因为电路的稳定性与相位裕度和幅值裕度密切相关。
相位裕度是指系统在某一频率下,从稳定状态开始到产生滞后相位时所能承受的相位变化量。
相位裕度越大,系统的稳定性就越好,反之则越差。
在实际电路设计中,为了保证电路的稳定性,相位裕度通常应该大于45度。
如果相位裕度小于45度,那么系统就可能会失去稳定性,产生振荡或者不稳定的输出。
幅值裕度是指系统从稳定状态开始到产生失稳时所能承受的幅值变化量。
幅值裕度越大,系统的稳定性就越好,反之则越差。
在实际电路设计中,为了保证电路的稳定性,幅值裕度通常应该大于1。
如果幅值裕度小于1,那么系统就可能会失去稳定性,产生振荡或者不稳定的输出。
相位裕度和幅值裕度的计算通常需要进行频率响应分析。
在频率响应分析中,可以通过Bode图、Nyquist图等图形方法来计算相位裕度和幅值裕度。
对于电路设计中的实际应用,一般采用仿真软件进行计算和分析,以便更好地评估电路的稳定性。
在电路设计中,相位裕度和幅值裕度是电路的重要性能指标。
在电路设计中,需要根据实际应用场合,合理选择电路的带宽、增益等参数,以保证电路的稳定性和性能。
同时,还需要采用合适的稳定性补偿技术,例如反馈控制、滤波器等方法,以提高电路的稳定性。
相位裕度和幅值裕度是电路设计中非常重要的指标,对于保证电路的稳定性和性能具有重要意义。
在实际应用中,需要根据实际情况进行合理的参数选择和稳定性补偿,以保证电路的稳定性和性能。
相位裕度和幅值裕度
相位裕度和幅值裕度是指给出的测量目标值可以有一定的上下
浮动范围,而不用考虑准确到每一个值。
这种浮动的范围被称为相位裕度和幅值裕度。
相位裕度是指当测量的相位结果偏离给定的测量目标值时,可以接受的最大上下浮动范围,通常以弧度来表示,例如目标相位是-90°,而测量值为-90.01°,则可以接受的相位浮动范围为0.01°。
幅值裕度是指当测量的幅值结果偏离给定的测量目标值时,可以接受的最大上下浮动范围,通常以分贝来表示,例如目标幅值是
-20dBm,而测量值为-19.9dBm,则可以接受的幅值浮动范围为0.1dB。
相位裕度和幅值裕度的设定一般取决于测量设备的精度、测量任务的要求等,在实际测量中也应该根据实际情况具体调整相位裕度和幅值裕度的值。
- 1 -。
Chp.5系统稳定性基本要求1.了解系统稳定性的定义、系统稳定的条件;2.掌握Routh判据的必要条件和充要条件,学会应用Routh判据判定系统是否稳定,对于不稳定系统,能够指出系统包含不稳定的特征根的个数;3.掌握Nyquist 判据;4.理解Nyquist 图和Bode 图之间的关系;5.掌握Bode 判据;6.理解系统相对稳定性的概念,会求相位裕度和幅值裕度,并能够在Nyquist 图和Bode 图上加以表示。
重点与难点本章重点1.Routh 判据、Nyquist 判据和Bode 判据的应用;2.系统相对稳定性;相位裕度和幅值裕度求法及其在Nyquist图和Bode 图的表示法。
本章难点Nyquist 判据及其应用。
§1 概念示例:振摆1、稳定性定义:若系统在初始条件影响下,其过渡过程随时间的推移逐渐衰减并趋于0,则系统稳定;反之,系统过渡过程随时间的推移而发散,则系统不稳定。
(图5.1.2)讨论:①线性系统稳定性只取决于系统内部结构和参数,是一种自身恢复能力。
与输入量种类、性质无关。
②系统不稳定必伴有反馈作用。
(图5.1.3)若x0(t)收敛,系统稳定;若x0(t)发散,则系统不稳定。
将X0(s)反馈到输入端,若反馈削弱E(s) →稳定若反馈加强E(s) →不稳定③稳定性是自由振荡下的定义。
即x i(t)=0时,仅存在x i(0-)或x i(0+)在x i(t)作用下的强迫运动而系统是否稳定不属于讨论范围。
2、系统稳定的条件:对[a n p n+a n-1p n-1+…a1p+a0]x0(t)=[b m p m+b m-1p m-1+…b1p+b0]x i(t)令B(s)= a n p n+a n-1p n-1+…a1p+a0 A(s)= b m p m+b m-1p m-1+…b1p+b0初始条件:B0(s) A0(s)则B(s)X0(s)- B0(s)= A(s)X i(s)- B0(s)X i(s)=0,由初始条件引起的输出:L-1变换根据稳定性定义,若系统稳定须满足,即z i为负值。
相位裕量和幅值裕量算法相位裕量和幅值裕量是用于评估系统稳定性和容错能力的重要指标。
相位裕量衡量了系统响应的相位与零点的距离,而幅值裕量衡量了系统响应的幅值与1的差距。
在控制系统设计中,相位裕量和幅值裕量的计算可以帮助工程师确定系统的稳定性和鲁棒性。
相位裕量的计算方法是通过测量系统响应的相位与零点的距离来进行的。
相位裕量通常使用相位裕量曲线来表示。
相位裕量曲线是系统相位与频率之间的关系图,通常以对数坐标绘制。
通过测量相位裕量曲线中的相位裕量角度,可以确定系统的相位裕量。
相位裕量角度定义为系统响应的相位与-180度(或180度)的差距。
相位裕量通常以度(°)或弧度(rad)表示。
常见的相位裕量计算方法有两种:一种是通过寻找开环传递函数的幅值交叉频率和相位交叉频率来计算的;另一种是通过测量系统的相位裕量曲线来计算的。
幅值裕量是用于评估系统的增益裕量和稳定裕量的指标。
幅值裕量是指系统响应的幅值与1的差距。
通常情况下,幅值裕量是通过测量系统的幅频响应曲线来计算的。
幅值裕量曲线是系统响应的幅度与频率之间的关系图,通常以对数坐标绘制。
幅值裕量可以通过测量幅值裕量曲线中的增益裕量和相位裕量来计算得到。
增益裕量定义为系统响应的最小增益与1之间的差距。
相位裕量定义为系统响应的相位与-180度之间的差距。
当增益裕量和相位裕量都大于零时,系统具有稳定性和容错能力,可以在不同工作条件下保持稳定。
相反,如果增益裕量或相位裕量为负,系统将失去稳定性,可能发生不稳定或不可预测的行为。
在实际控制系统设计中,相位裕量和幅值裕量的计算是非常重要的。
它们可以帮助工程师评估系统的稳定性和容错能力,并调整控制器的增益和参数以保持系统的稳定性。
通过合理设计和优化控制系统的相位裕量和幅值裕量,可以提高系统的性能和可靠性。
总结起来,相位裕量和幅值裕量是用于评估系统稳定性和容错能力的重要指标。
相位裕量衡量系统响应的相位与零点的距离,幅值裕量衡量系统响应的幅值与1的差距。
相位裕度和幅值裕度
相位裕度和幅值裕度是控制系统设计中非常重要的两个概念。
相位裕度是指系统在特定频率下的相位差与180度之间的差距,而幅值裕度则是指系统在特定频率下的增益与1之间的差距。
这两个概念对于控制系统的稳定性和性能都有着至关重要的影响。
相位裕度是控制系统稳定性的重要指标之一。
在控制系统中,相位裕度越大,系统的稳定性就越好。
相位裕度的大小取决于系统的相位延迟和频率响应。
如果系统的相位延迟过大,那么相位裕度就会变小,从而导致系统的稳定性下降。
因此,在控制系统设计中,需要尽可能地减小系统的相位延迟,以提高系统的相位裕度。
幅值裕度是控制系统性能的重要指标之一。
在控制系统中,幅值裕度越大,系统的性能就越好。
幅值裕度的大小取决于系统的增益和频率响应。
如果系统的增益过小,那么幅值裕度就会变小,从而导致系统的性能下降。
因此,在控制系统设计中,需要尽可能地增加系统的增益,以提高系统的幅值裕度。
在控制系统设计中,相位裕度和幅值裕度是相互关联的。
如果系统的相位裕度和幅值裕度都很小,那么系统的稳定性和性能都会受到影响。
因此,在控制系统设计中,需要综合考虑相位裕度和幅值裕度,以达到最佳的控制效果。
相位裕度和幅值裕度是控制系统设计中非常重要的两个概念。
它们
对于控制系统的稳定性和性能都有着至关重要的影响。
在控制系统设计中,需要综合考虑相位裕度和幅值裕度,以达到最佳的控制效果。
相角裕度和幅值裕度的一种估算方法刘美侠;孙延永【摘要】Phase angle margin and amplitude margin are important indicators of the relative stability in the automatic control system. A method to estimate phase angle and amplitude margin is proposed. The cut-off frequency of seeking an approximate method is introduced, and the definition to equate phase angle margin is used; then the solution of the amplitude margin by using the routh stability of the system to equate the critical open-loop gain is introduced, and the meaning of amplitude margin to derive is re-used. Thus the approximate method to calculate the crossover frequency is drawled. The estimation methods are simple and practical and the examples prove that these methods have higher calculation accuracy.%相角裕度和幅值裕度是自动控制系统中反应系统的相对稳定性的重要指标。
本文提出了求解相角裕度和幅值裕度一种估算方法,首先介绍了截止频率的一种估算求法,再利用相角裕度定义求出相角裕度;其次是先通过劳斯判据求出系统临界稳定时的开环增益,再利用幅值裕度的含义求出,最后用估算法求出穿越频率。
幅值裕度计算公式一、幅值裕度简介幅值裕度是指信号在传输过程中的最大幅值与所采用的传输方式的最大幅值之间的差距,也被称为“余量”。
幅值裕度计算公式应用广泛,特别是在电子工程学中。
在电路设计中,幅值裕度是一个非常重要的概念,它是评估电路是否能够正常工作的重要指标。
在音频和视频信号处理中,幅值裕度也是非常关键的因素,因为它可以帮助我们确定信号能够传输的最大范围。
二、幅值裕度计算公式幅值裕度通常被表示为一个单位,例如分贝(dB),也可以用百分比表示。
幅值裕度的计算公式取决于所传输的信号类型和所采用的传输方式。
以下是几种常见的幅值裕度计算公式:1. 直流电路幅值裕度(dB)= 20log10(Vin/Vout)其中,Vin是输入电压,Vout是输出电压。
2. 交流电路对于交流电路,幅值裕度可以通过以下公式来计算:幅值裕度(dB)= 20log10(Vpeak / Vrms)其中,Vpeak是信号的峰值电压,Vrms是信号的有效值(均方根值)。
3. 数字信号对于数字信号,幅值裕度可以通过以下公式来计算:幅值裕度(dB)= 20log10((Max Value)/ Desired Value)其中,Max Value是数字信号可以达到的最大值,Desired Value是所需传输的幅值。
4. 音频信号幅值裕度(dB)= 20log10(Vpeak / VU)其中,Vpeak是音频信号的峰值电平,VU是“单位音量”,通常是0dBVU。
5. 视频信号对于视频信号,幅值裕度可以根据不同的信号标准来计算。
例如,在PAL(欧洲)和NTSC(北美)制式中,幅值裕度可以通过以下公式来计算:幅值裕度(dB)= 20log10(Vpeak / 0.7V)其中,Vpeak是视频信号的峰值电平。
三、总结幅值裕度是评估信号传输能力的重要指标。
无论是电子工程学还是音视频信号处理,都需要使用幅值裕度计算公式来帮助评估信号的最大传输范围。
相位裕量计算公式
相位裕量计算公式
相位裕量计算公式
相位裕量是一个重要的系统性能指标,通常用来衡量系统对于干扰和噪声的抵抗能力。
相位裕量的计算方法如下:
1. 首先,需要确定系统的开环传递函数H(s);
2. 然后,可以通过求解H(s)的极点和零点来得到系统的相位特性;
3. 接下来,需要确定系统的稳定裕量GM和相位裕量PM;
4. 最后,可以使用以下公式来计算相位裕量:
PM = 180° + φm - φgc
其中,φm表示系统相位特性的最小值,而φgc表示系统的相位裕量保证边界(通常取为45°)与系统相位特性交点的相位角。
需要注意的是,相位裕量的计算通常需要进行复杂的数学推导和分析,因此需要有一定的数学基础和专业知识。
同时,在实际应用中,也需要考虑到系统的实际工作环境和工作条件,以及可能存在的各种干扰和噪声因素,才能更准确地计算出相位裕量。
- 1 -。
相位裕量计算公式
相位裕量计算公式是一种用于计算相位裕量的公式,它可以
帮助我们更好地理解和控制相位裕量。
相位裕量是指在控制系统中,由于系统参数的不确定性,系统的输出和输入之间的时间差。
相位裕量计算公式可以用来计算系统的相位裕量,以便更好地控
制系统的性能。
相位裕量计算公式的基本形式是:Φ=Φm-Φs,其中Φm是
系统的最大相位裕量,Φs是系统的最小相位裕量。
这个公式可以
用来计算系统的相位裕量,以便更好地控制系统的性能。
此外,相位裕量计算公式还可以用来计算系统的相位延迟,
以便更好地控制系统的性能。
相位延迟是指系统的输出和输入之
间的时间差,它可以用来衡量系统的响应速度。
相位延迟计算公
式的基本形式是:ΔΦ=ΔΦm-ΔΦs,其中ΔΦm是系统的最大相位
延迟,ΔΦs是系统的最小相位延迟。
总之,相位裕量计算公式是一种用于计算相位裕量和相位延
迟的公式,它可以帮助我们更好地理解和控制系统的性能。
它可
以用来计算系统的相位裕量和相位延迟,以便更好地控制系统的
性能。