相角裕度幅值裕度知识讲解
- 格式:ppt
- 大小:1.64 MB
- 文档页数:25

幅值裕度和相角裕度计算幅值裕度和相角裕度计算,这可真是个有趣又烧脑的事儿啊。
我在实验室里研究控制系统的时候,就老得琢磨这俩玩意儿。
周围那些仪器啊,闪着小灯,嗡嗡响着,就像一群小虫子在叫。
我的搭档,是个眼睛小小的家伙,戴着个黑框眼镜,那镜片厚得像酒瓶底儿。
他拿着计算草稿,眉头皱得像麻花,嘟囔着:“这幅值裕度和相角裕度可真不好算呐。
”咱先说这幅值裕度计算。
这就像在走迷宫,得找到那个关键的出口。
你得先把开环传递函数搞清楚,那函数就像一团乱麻,得一点点梳理。
这函数里的参数啊,有的像调皮的小鬼,稍不注意就把你带偏了。
我们在计算的时候,拿着计算器按个不停,那计算器的按键声,哒哒哒的,就像小马蹄在跑。
有次我算着算着,算错了一个数,结果那数值差得离谱,我气得直拍脑袋,像个傻瓜一样。
相角裕度计算也不简单。
它和幅值裕度就像一对难兄难弟。
得先找到截止频率,这就像在大海里找一颗珍珠一样。
要画出伯德图,那伯德图的线啊,弯弯绕绕的,就像山路一样。
我拿着尺子在纸上比划着,想把线画准,眼睛都看花了。
我问搭档:“你看这线对不?” 他凑过来,眼睛瞪得老大,看了半天说:“好像不太对,再量量。
”这幅值裕度和相角裕度计算啊,得细心又细心。
要是算错了,那控制系统可就出大问题了,就像火车跑错了轨道一样。
不过呢,当你好不容易算对了,那种感觉就像打了胜仗一样,心里美美的。
而且这俩概念在实际中用处可大了,就像给控制系统上了保险,让它稳稳当当的,不会出乱子。
咱搞这行的,就得把这些计算吃透,就像老虎咬住猎物不松口一样,这样才能把控制系统设计得更好,让那些机器啊、设备啊都乖乖听话。
相位裕度和幅值裕度
相位裕度和幅值裕度是指给出的测量目标值可以有一定的上下
浮动范围,而不用考虑准确到每一个值。
这种浮动的范围被称为相位裕度和幅值裕度。
相位裕度是指当测量的相位结果偏离给定的测量目标值时,可以接受的最大上下浮动范围,通常以弧度来表示,例如目标相位是-90°,而测量值为-90.01°,则可以接受的相位浮动范围为0.01°。
幅值裕度是指当测量的幅值结果偏离给定的测量目标值时,可以接受的最大上下浮动范围,通常以分贝来表示,例如目标幅值是
-20dBm,而测量值为-19.9dBm,则可以接受的幅值浮动范围为0.1dB。
相位裕度和幅值裕度的设定一般取决于测量设备的精度、测量任务的要求等,在实际测量中也应该根据实际情况具体调整相位裕度和幅值裕度的值。
- 1 -。
相角裕度和幅值裕度定义
相角裕度和幅值裕度是电路稳定性和控制系统设计中常用的概念。
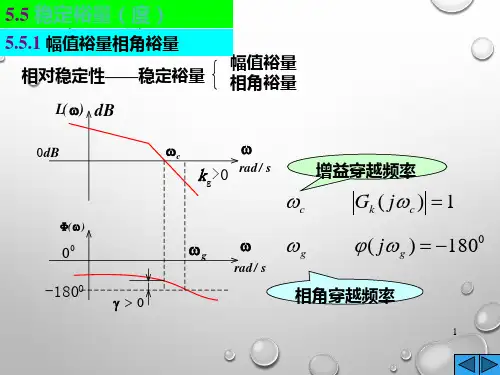
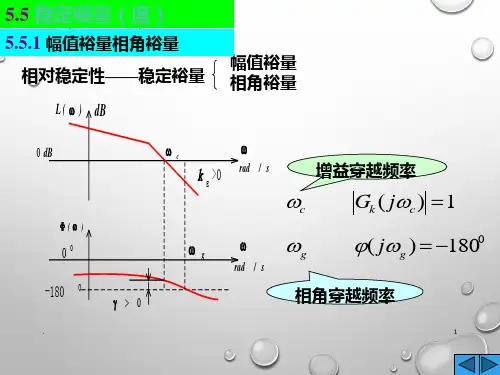
相角裕度是指系统的相位差与临界相位差之间的差距,幅值裕度是指系统的增益与临界增益之间的差距。
相角裕度和幅值裕度的目的是保证系统在不同工作条件下仍能保持稳定性和良好的性能。
在控制系统设计中,相角裕度和幅值裕度是非常重要的概念。
相角裕度是指系统相位差与临界相位差之间的差距,临界相位差是系统稳定的临界条件。
相角裕度越大,系统的稳定性就越好。
在频率响应曲线上,相角裕度可以通过相角裕度曲线来表示。
相角裕度曲线是系统传递函数的相角与频率的函数。
幅值裕度是指系统增益与临界增益之间的差距,临界增益是系统稳定的临界条件。
幅值裕度越大,系统的稳定性就越好。
在频率响应曲线上,幅值裕度可以通过幅值裕度曲线来表示。
幅值裕度曲线是系统传递函数的幅值与频率的函数。
在电路稳定性分析中,相角裕度和幅值裕度也是非常重要的概念。
相角裕度和幅值裕度可以通过极点和零点的位置来判断系统的稳定性。
如果系统的极点或零点在右半平面,那么系统就是不稳定的。
如果系统的极点或零点在虚轴上,那么系统就是边缘稳定的。
如果系统的极点或零点在左半平面,那么系统就是稳定的。
综上所述,相角裕度和幅值裕度是控制系统设计和电路稳定性分析中非常重要的概念。
通过相角裕度和幅值裕度的分析,可以确保系统在不同工作条件下仍能保持稳定性和良好的性能。
自动控制原理稳定边界知识点总结自动控制原理是现代控制工程学中最重要的一门课程之一,它研究的是系统的稳定性和稳定性边界。
稳定性边界是指系统在稳定与不稳定之间的边界,也是系统在不同参数设置下的临界点。
了解和掌握稳定边界知识点对于理解和设计控制系统至关重要。
本文将对自动控制原理稳定边界的相关知识点进行总结。
一、稳定性概念与判据在自动控制系统中,稳定性是指系统在任何初始状态下,经过一段时间的调整后,能够达到平衡状态或者在有限范围内波动。
稳定性判据有两种常见的方法:时域法和频域法。
1. 时域法时域法是根据系统输出的响应来判断系统的稳定性。
根据系统的传递函数,可以通过判断系统的极点位置来得出稳定性的结论。
稳定的系统应该具有所有极点的实部为负的特性。
2. 频域法频域法是通过分析系统函数在复平面上的极点和零点的位置来判断系统的稳定性。
常用的频域法有奈奎斯特准则和Nyquist图。
二、稳定边界的相关概念稳定边界是指系统在参数变化的过程中,从稳定到不稳定的过程中的临界点。
与稳定性判据相比,稳定边界更能揭示系统的稳定性特性。
1. 临界稳定系统临界稳定系统是指系统的稳定边界上一种特殊的情况,此时系统刚好处于稳定与不稳定之间。
临界稳定系统的特点是系统的相角频率特性在临界点处有90°的相移。
2. 相角裕度和增益裕度相角裕度和增益裕度是用来衡量系统稳定边界的两个重要指标。
相角裕度是指系统阶跃响应曲线的相位与稳定边界的相位差,增益裕度是指系统在稳定边界上下降3dB时的增益余量。
三、改善系统稳定性的方法为了提高系统的稳定性和降低稳定边界,可以采取一些改善措施。
1. 增加系统的阻尼通过增加系统的阻尼,可以减小系统的振荡幅值,提高系统的稳定性。
常用的增加阻尼的方法有增加阻尼器和减小系统的增益等。
2. 设计合适的控制器合理的控制器设计是提高系统稳定性的关键。
可以采用比例控制器、积分控制器和微分控制器等来控制系统的响应特性,进而改善系统的稳定性。
一般来说,)(ωj G 的轨迹越接近与包围-1+j001j +-点,系统响应的震荡性越大。
因此,)(ωj G 的轨迹对01j +-点的靠近程度,可以用来度量稳定裕量(对条件稳定系统不适用)。
在实际系统中常用相位裕量和增益裕量表示。
64ωLog ωLog ωLog ωLog ︒-90︒-270︒-180Positive Gain MarginPositive Phase Margin Negative Gain MarginNegative Phase Margin Stable SystemUnstable SystemdB ︒-90︒-270︒-1800dBRePositive Phase MarginNegative Gain MarginNegative Stable SystemUnstable System(ωj G图1 稳定系统和不稳定系统的相位裕度和幅值裕度相位裕度、相角裕度(Phase Margin)γ设系统的截止频率(Gain cross-over frequency)为c ω 1)()()(==c c c j H j G j A ωωω 定义相角裕度为)()(180c c j H j G ωωγ+︒=相角裕度的含义是,对于闭环稳定系统,如果开环相频特性再滞后γ度,则系统将变为临界稳定。
当0>γ 时,相位裕量相位裕度为正值;当0<γ时,相位裕度为负值。
为了使最小相位系统稳定,相位裕度必须为正。
在极坐标图上的临界点为0分贝和-180度。
︒-180增益裕度、幅值裕度(Gain Margin)h 设系统的穿越频率(Phase cross-over frequency)πωωωϕ)12()()()(+==k j H j G x x x , ,1,0±=k定义幅值裕度为)()(1x x j H j G h ωω=幅值裕度h 的含义是,对于闭环稳定系统,如果系统开环幅频特性再增大h 倍,则系统将变为临界稳定状态。
幅值裕度和相角裕度
幅值裕度和相角裕度是控制系统设计中非常重要的两个指标。
幅值裕度是指系统增益的变动范围,即输入信号变化时系统输出信号的最大变化范围与输入信号幅值的比值。
相角裕度是指系统相位的变动范围,即输入信号变化时系统输出信号相位的最大变化范围与输入信号相位的比值。
幅值裕度和相角裕度的大小直接影响系统的稳定性和性能。
幅值裕度越大,系统对于幅度变化的容忍度也就越大,系统的稳定性越好;相角裕度越大,系统对于相位变化的容忍度也就越大,系统的稳定性也越好。
因此,在系统设计中,需要根据具体的要求和控制目标,合理地选择幅值裕度和相角裕度的大小,以确保系统的稳定性和性能。
在实际的控制系统中,一般采用控制理论中的方法来计算幅值裕度和相角裕度,并根据计算结果进行系统设计和调节。
同时,也需要进行系统的实验和测试,以验证系统的稳定性和性能是否符合设计要求。
- 1 -。
相角裕度和幅值裕度
通过实验,确定了电机励磁级的相角裕度和幅值裕度。
可利用这些参数进行电机参数优化,降低电动机运行中的失速概率,提高运行稳定性和可靠性;可以修正电机损耗,改善满负荷时的功率损失,从而提高电机运行时的效率;可以根据工况变化实时调节电机励磁级,改善电机负荷变化的影响。
此外,可通过更改电机励磁级,改变电机特性从而满足特定应用需求,如改善行程控制精度或者改变电机的旋转方向等。
通过相角裕度和幅值裕度的调整,可以大大降低电机的振荡,提高电机的功率密度、性能和可靠性,从而改善整个系统的性能。
此外,可以通过相角裕度和幅值裕度的调整,较为精确的检测出各类故障状态,如漏电流,过热电机和电机控制器故障等,从而更有效的排除问题,提高电机系统故障诊断精度。
通过调整相角裕度和幅值裕度参数,实时优化电机参数,可使被控电机在变化的工况下保持最佳的工作性能,从而为用户节约能源,缩短预热时间和延长运行时间。
简述幅值裕度的概念幅值裕度是一个工程学术语,它是指在幅值的基础上再留有一定余地的程度,即允许存在的最大偏差。
这个概念常用于数学、物理等学科以及电流、电磁、机械等领域。
幅值就是幅度,指的是偏离平衡位置的最大距离。
例如,在一个周期内,交流电出现的最大绝对值,称为交流电的幅值,也叫最大值、振幅、峰值。
幅值裕度表示了系统在幅值方面的稳定储备量。
它与系统的稳定性密切相关。
在开环系统中,如果幅值裕度h大于2(h(dB)大于0),则系统是稳定的;如果h小于2(h(dB)小于0),则系统是不稳定的。
在相角裕度方面,一般要求相角裕度γ大于40°(γ大于0),表示奈奎斯特曲线未包围(-1,j0)点,系统是稳定的;如果γ小于0,表示奈奎斯特曲线包围了(-1,j0)点,系统是不稳定的;如果γ等于0,表示奈奎斯特曲线通过了(-1,j0)点,系统是临界稳定的。
在设计控制系统时,为了使系统具有足够的稳定裕度和获得良好的动态性能,一般要求相角裕度γ=30~70度,幅值裕度h=2~2.5或h(dB)=6~8。
在电路设计中,幅值裕度也是一个重要的概念,它可以用来描述信号的稳定性和可靠性。
幅值裕度越大,信号的稳定性和可靠性就越高。
幅值裕度在工程领域中具有重要的应用价值。
首先,它代表了系统在面对外部扰动时的稳定性。
当系统受到外部干扰时,幅值裕度可以保证系统不会立即失去稳定性,而是会在一定范围内波动。
其次,幅值裕度可以用来衡量系统的鲁棒性。
具有较大幅值裕度的系统,通常更加稳定。
1.在控制系统设计中,幅值裕度是一个关键的性能指标。
它表示了系统在幅值方面的稳定储备量,是评估系统稳定性的重要依据。
为了使系统具有足够的稳定裕度和获得良好的动态性能,一般要求相角裕度γ=30~70度,幅值裕度h=2~2.5或h(dB)=6~8。
2.在电路设计中,幅值裕度也是一个重要的概念,它可以用来描述信号的稳定性和可靠性。
幅值裕度越大,信号的稳定性和可靠性就越高。