重型车辆多轴转向系统设计综述
- 格式:pdf
- 大小:603.75 KB
- 文档页数:8
载重汽车转向系统结构设计学校:湘潭大学学院:兴湘学院专业:机械设计制造及其自动化姓名:张浩学号:2010963237指导老师:刘柏希老师摘要论文主要阐述了转向系统的设计。
汽车转向系统是汽车的重要组成部分,它直接影响汽车行驶的安全性,其质量严重影响汽车的操纵稳定性。
随着汽车工业的发展,汽车转向系统也在不断的得到改进,虽然电子转向系统已经开始使用,但是传统的机械转向系统依然起着主导作用。
转向系统由于其自身的特点被广泛运用于各类汽车之中。
本文重点设计了转向系统,并对转向系统零件强度、刚度进行了校核,同时还对转向系统计算载荷进行确定,同时对转向系统的其他主要零部件进行了结构设计,同样也对所设计的转向机构进行了分析和研究。
实现了转向系统结构简单紧凑,轴向尺寸短,且零件数目少的优点又能增加助力,从而实现了汽车转向的稳定性和灵敏性。
最后运用三维设计软件对所设计的结构进行了三维模型的建立,通过三维模型的设计与建立,更进一步的验证了所设计结构的合理性。
关键词:转向系统;转向系统;机械转向;转向;液压助力AbstractThis paple mainly tell about the design of circulation ball steering system. Redirector,an important component of the automobile,which is the key assembly decided the safety of the automobile. It seriously affected the quality of the vehicle handing and stability. Along with the development of the auto industry,automobile steering gear is continuously improved, although the electronic steering gear has began to use ,but the traditional mechanical steering gear is still p lays a leading role. Circulation ball type steering system has been widely used in various cars as of its characteristics.This paper designs the circulating ball type steering gear and steering parts strength and stiffness for the checking, but also to determine steering system computational load, at the same time to the other main parts of steering system structure design, also in the design of steering mechanism is analyzed and studied. Implements the redirector simple and compact structure, short axial dimensions, and the advantage of less parts number and can increase power, so as to realize the vehicle steering stability and sensitivity. Finally by using the 3 d design software to design 3 d model of structure, through the design and build 3 d model, further verify the rationality of the design structure.Key words: Steering gear; Steering system; Mechanical steering; Circulating ball type; The hydraulic power目录1 绪论 (1)1.1转向系统的使用背景 (1)1.2转向系统的研究意义 (1)1.3国内外研究现状 (2)1.4主要研究工作 (3)2 转向系统工作原理及其特点 (5)2.1转向系统概述 (5)2.2转向系统特点 (7)3 转向系统主要性能参数 (9)3.1转向系统的效率 (9)3.2传动比的变化特性 (11)3.3转向系统传动副的传动间隙△t (13)3.4转向系统计算载荷的确定 (13)4 转向系统的尺寸参数计算 (15)4.1主要尺寸参数的选择 (15)4.2变厚齿扇 (20)4.3转向系统零件强度计算 (25)4.4转向系统的润滑方转向和密封类型的选择 (27)5 转向传动机构设计 (28)5.1转向传动机构原理 (28)5.2转向梯形的布置 (29)5.3转向梯形机构尺寸的初步确定 (29)5.4梯形校核 (29)5.5转向传送机构的臂、杆与球销 (30)5.6转向横拉杆及其端部 (31)5.7杆件设计结果 (32)6 转向系统的其它部分 (33)6.1万向传动装置 (33)6.2传动轴与中间支承 (35)6.3动力转向机构设计 (35)6.4汽车转向系统的日常维护 (37)7 转向系统三维造型 (39)7.1 solidworks简介 (39)7.2转向系统的三维装配设计 (39)8 结论 (41)参考文献 (42)致谢 (43)毕业设计(论文)知识产权声明............................................ 错误!未定义书签。

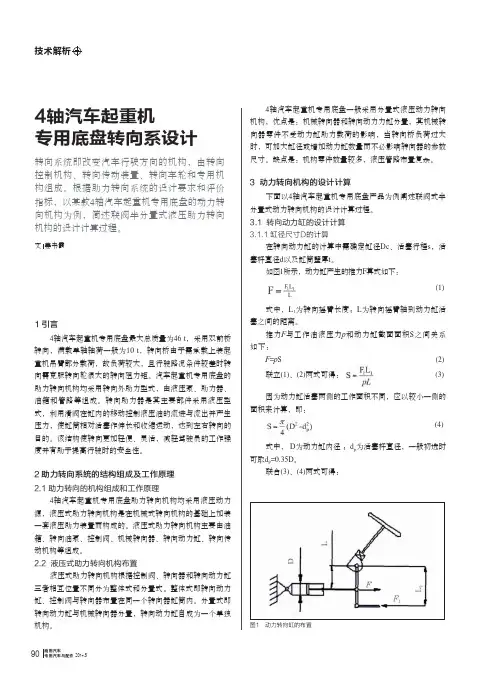
多轴专用汽车转向传动机构的设计1 前言大型专用汽车的转向轴多在二轴以上,有的甚至多达五轴,其转向性能的好坏直接影响车辆行驶的灵活性、操纵稳定性、经济性和轮胎的使用寿命,而且车轴越多,转向对车辆行驶影响越大。
作为转向系统的转向梯形机构,文献运用参数方程对转向梯形机构进行了建模和分析、研究,但对转向传动机构分析和计算的几何法就十分不便,特别是结构复杂的独立悬架的传动机构计算更为不便。
本文运用参数方程法,对转向传动机构的各点用坐标参数来表示,建立参数方程求解、分析,提出了一种可运用于多轴转向的传动机构优化设计的计算方法,达到各轴转向协调的目的,提高车辆行驶的灵活性、操纵稳定性和经济性。
2 转向时各转向桥的理想转角关系图1为某前双桥转向底盘转向时各转向轴内外转向轮的理想转角关系,由于不研究转向梯形机构,只讨论转向传递关系,所以只分析内侧的车轮的转角关系。
3 一桥传动机构传动模型多轴转向汽车一般通过连杆机构来保证同一侧车轮在转向时绕同一瞬心作圆周运动。
下面以常用的连杆机构中第一轴摇臂的摆角与车轮转向臂转角的对应为例,说明连杆机构的运动关系(如图2)。
图2中:A1为车轮转向节臂初始位置;Al′为车轮转动角a1转向节臂位置;B1为一桥传动摇臂初始位置;B1′为车轮转动a1′角一桥传动摇臂位置。
4 一桥梯形机构传动模型根据文献的梯形机构的建模方式,将梯形机构简化为平面机构,则一桥梯形机构得一桥外轮转角a1′与一桥内轮转角a1之间关系(如图3)。
图3中:A1为内轮转向节臂初始位置;A1′为内轮转动a1角转向节臂位置;El为外轮转向节臂初始位置;E1′为外轮转动a1′角一桥传动摇臂位置。
一桥至二桥之间的传动模型7 设计优化由(4)、(6)、(8)、(9)、(10)式可计算出一桥车轮内、外轮的每一转角与二桥车轮内、外轮的每一转角的对应数据,将该数据与由(2)式计算出的理论转角数据进行比较。
考虑到轮胎侧偏角,理论与实际转角差可由轮胎产生侧偏角来弥补。
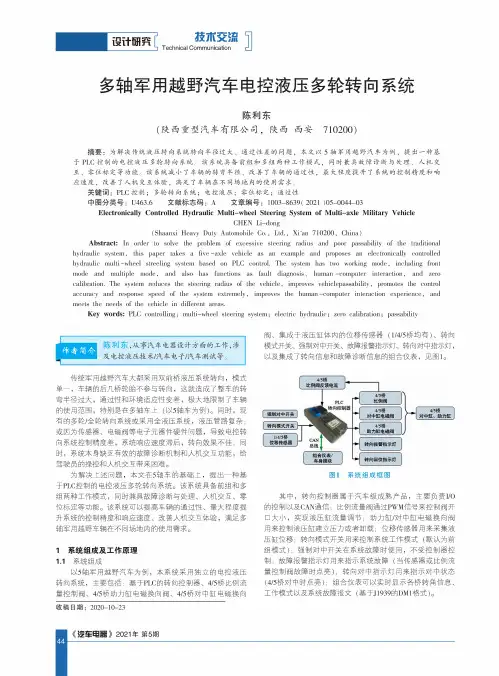
3设计)奔〔技朮交.Technical Communication多轴军用越野汽车电控液压多轮转向系统陈利东(陕西重型汽车有限公司,陕西西安710200)摘要:为解决传统液压转向系统转向半径过大、通过性差的问题,本文以5轴军用越野汽车为例,提出一种基于PLC控制的电控液压多轮转向系统。
该系统具备前组和多组两种工作模式,同时兼具故障诊断与处理、人机交互、零位标定等功能。
该系统减小了车辆的转弯半径、改善了车辆的通过性,最大程度提升了系统的控制度和响度,改善了人机交互体验,满足了车辆在不同的使用需求。
关键词:PLC控制;多轮转向系统;电控液压;零位标定;通过性中图分类号:6463.6文献标志码:A文章编号:1003-8639(2021)05-0044-03Electronically Controlled Hydraulic Multi-wheel Steering System of Multi-axle Military VehicleCHEN Li-dong(Shaanxi Heavy Duty Automobile Co.,Ltd.,Xi'an710200,China)Abstract:In order to solve the problem of excessive steering radius and poor passability of the traditional hydraulic system,this paper takes a five-axle vehicle as an example and proposes an electronically controlled hydraulic multi-wheel streeling system based on PLC control.The system has two working mode,including front mode and multiple mode,and also has functions as fault diagnosis、human-computer interaction,and zero calibration.The system reduces the steering radius of the vehicle,improves vehiclepassability,promotes the control accuracy and response speed of the system extremely,improves the human-computer interaction experience,and meets the needs of the vehicle in different areas.Key words:PLC controlling;multi-wheel steering system;electric hydraulic;zero calibration;passability陈利东,从事汽车电器设计方面的工作,涉及电控液压技术/汽车电子/汽车测试等:阀、成于液压的感器(1/4/5桥均有)、转向模式、制、故障、转向V 以成了转向和故障诊的V1。
汽车设计课程设计说明书题目:重型载货汽车转向器设计姓名:席昌钱学号:200924265同组者:严炳炎、孔祥生、余鹏、李朋超、郑大伟专业班级:09车辆工程2班指导教师:王丰元、邹旭东设计任务书目录1.转向系分析 (4)2.机械式转向器方案分析 (8)3.转向系主要性能参数 (9)4.转向器设计计算 (14)5.动力转向机构设计 (16)6.转向梯形优化设计 (22)7.结论 (24)8.参考文献 (25)1转向系设计1.1基本要求1.汽车转弯行驶时,全部车轮应绕瞬时转向中心旋转。
2.操纵轻便,作用于转向盘上的转向力小于200N。
3.转向系的角传动比在23~32之间,正效率在60%以上,逆效率在50%以上。
4.转向灵敏。
5.转向器和转向传动机构中应有间隙调整机构。
6.转向系应有能使驾驶员免遭或减轻伤害的防伤装置。
1.2基本参数1.整车尺寸: 11976mm*2395mm*3750mm。
2.轴数/轴距 4/(1950+4550+1350)mm3.整备质量 12000kg4.轮胎气压 0.74MPa2.转向系分析2.1对转向系的要求[3](1) 保证汽车有较高的机动性,在有限的场地面积内,具有迅速和小半径转弯的能力,同时操作轻便;(2) 汽车转向时,全部车轮应绕一个瞬时转向中心旋转,不应有侧滑;(3) 传给转向盘的反冲要尽可能的小;(4) 转向后,转向盘应自动回正,并应使汽车保持在稳定的直线行驶状态;(5) 发生车祸时,当转向盘和转向轴由于车架和车身变形一起后移时,转向系统最好有保护机构防止伤及乘员.2.2转向操纵机构转向操纵机构包括转向盘,转向轴,转向管柱。
有时为了布置方便,减小由于装置位置误差及部件相对运动所引起的附加载荷,提高汽车正面碰撞的安全性以及便于拆装,在转向轴与转向器的输入端之间安装转向万向节,如图2-1。
采用柔性万向节可减少传至转向轴上的振动,但柔性万向节如果过软,则会影响转向系的刚度。
目录目录1绪论 (1)1.1重载车辆的发展概况 (1)1.2转向技术发展概况 (2)1.3连杆机构概述 (5)1.4本论文的主要研究内容和研究意义 (6)1.4.1本论文的主要研究内容 (6)1.4.2本论文的研究意义 (6)1.5本章小结 (7)2 Watt-Ⅱ型转向机构设计的理论基础 (9)2.1重载车辆转向系统概述 (9)2.2理想转向原理 (9)2.3平面连杆机构综合的基本问题 (11)2.4刚体位移矩阵 (12)2.5精确点的选取 (14)2.6本章小结 (15)3 Watt-Ⅱ型转向机构的设计 (17)3.1中心臂转向机构的转向原理 (17)3.2最小转弯半径 (17)3.3转向机构数学模型的建立 (18)3.4六杆机构的尺寸综合 (20)3.5 Matlab求解机构尺寸 (21)3.5.1 Matlab简介 (21)3.5.2 Matlab求解 (23)3.6本章小结 (24)4 Watt-Ⅱ型转向机构的建模与仿真分析 (25)4.1Watt-Ⅱ型转向机构的建模 (25)4.2虚拟样机技术 (25)4.3 ADAMS简介 (28)4.4基于ADAMS的Watt-Ⅱ型转向机构仿真分析 (29)4.4.1ADAMS中虚拟样机模型的建立 (29)4.4.2Watt-Ⅱ型转向机构模型仿真 (30)4.5Watt-Ⅱ型转向机构误差分析 (35)Ⅰ目录4.5.1误差分析 (35)4.5.2转向机构误差分析 (36)4.6本章小结 (45)5 Watt-Ⅱ型转向机构车辆运动轨迹仿真 (47)5.1Vrep简介 (47)5.1.1Vrep软件介绍 (47)5.1.2Vrep用户界面 (48)5.2Watt-Ⅱ型转向机构Vrep建模 (49)5.3运动轨迹仿真 (50)5.4本章小结 (55)6 总结与展望 (57)6.1全文总结 (57)6.2展望 (57)致谢 (59)参考文献 (61)攻读学位期间主要研究成果 (65)绪论1绪论1.1重载车辆的发展概况改革开放40周年以来,我国国内基础设施不断发展和完善,截止2018年底,我国的高速公路总里程已经超过14万公里,已经连续七年位居世界第一;公路总里程五年增长约53.4万公里。
多轴车辆后桥转向技术综述及展望
许依凡;袁庆浩;杨柳佳;赵文涛;王旭光;徐江;张伟
【期刊名称】《机电工程技术》
【年(卷),期】2024(53)2
【摘要】回顾了应用于多轴车辆后桥转向技术的概念与技术。
随着工业的迅速发展,大马力、高承载能力的车辆得到更多的应用,由此引发较多的转向问题,以多轴车辆需求为切入点开展研究,其行驶工况复杂,要求有足够动力的同时也要求有更好的操纵灵活性和操纵稳定性。
目前后桥转向技术有机械式、全液压式、电控电动式以及电控液压式等,较先进且应用较广的为电控液压式。
电控液压式后桥转向系统共有3种类型:一是通过电磁阀来控制液压缸,二是利用普通电机-变量马达控制液压缸,三是伺服电机-定量马达控制液压缸。
研究讨论了这些不同类型的转向系统,详细描述各种类型的优点、缺点,并探讨了未来后桥转向系统的发展趋势。
通过对后桥转向系统的研究,为提高多轴车辆转向性能的优化、实现网-机-电-液一体化的发展提供科研思路,为将来实现车辆转向智能化、精准化打下坚定的基础。
【总页数】6页(P64-68)
【作者】许依凡;袁庆浩;杨柳佳;赵文涛;王旭光;徐江;张伟
【作者单位】山东建筑大学机电工程学院;山东新华医疗器械股份有限公司;中国重型汽车集团汽车研究院
【正文语种】中文
【中图分类】U463.4
【相关文献】
1.基于虚拟样机技术的多轴转向车辆建模与仿真分析
2.重型特种车辆多轴转向技术的优化设计
3.多轴分布式电驱动车辆后桥差动转向控制策略研究
4.城轨车辆单轴转向架关键技术综述
5.后桥主动转向在多轴车辆中的应用
因版权原因,仅展示原文概要,查看原文内容请购买。
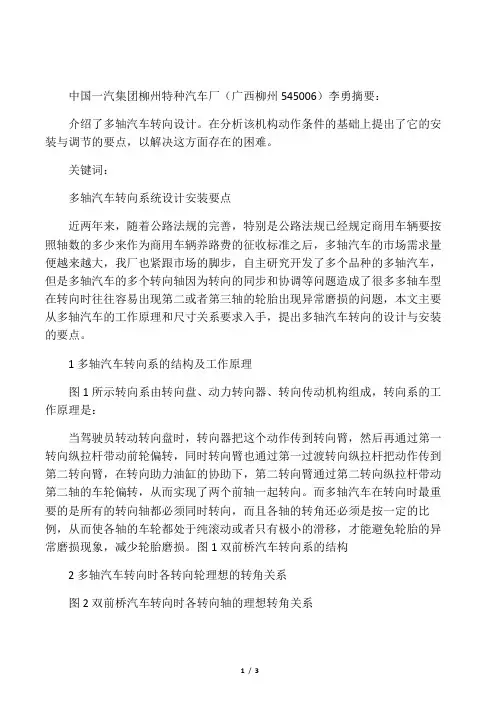
中国一汽集团柳州特种汽车厂(广西柳州545006)李勇摘要:介绍了多轴汽车转向设计。
在分析该机构动作条件的基础上提出了它的安装与调节的要点,以解决这方面存在的困难。
关键词:多轴汽车转向系统设计安装要点近两年来,随着公路法规的完善,特别是公路法规已经规定商用车辆要按照轴数的多少来作为商用车辆养路费的征收标准之后,多轴汽车的市场需求量便越来越大,我厂也紧跟市场的脚步,自主研究开发了多个品种的多轴汽车,但是多轴汽车的多个转向轴因为转向的同步和协调等问题造成了很多多轴车型在转向时往往容易出现第二或者第三轴的轮胎出现异常磨损的问题,本文主要从多轴汽车的工作原理和尺寸关系要求入手,提出多轴汽车转向的设计与安装的要点。
1多轴汽车转向系的结构及工作原理图1所示转向系由转向盘、动力转向器、转向传动机构组成,转向系的工作原理是:当驾驶员转动转向盘时,转向器把这个动作传到转向臂,然后再通过第一转向纵拉杆带动前轮偏转,同时转向臂也通过第一过渡转向纵拉杆把动作传到第二转向臂,在转向助力油缸的协助下,第二转向臂通过第二转向纵拉杆带动第二轴的车轮偏转,从而实现了两个前轴一起转向。
而多轴汽车在转向时最重要的是所有的转向轴都必须同时转向,而且各轴的转角还必须是按一定的比例,从而使各轴的车轮都处于纯滚动或者只有极小的滑移,才能避免轮胎的异常磨损现象,减少轮胎磨损。
图1双前桥汽车转向系的结构2多轴汽车转向时各转向轮理想的转角关系图2双前桥汽车转向时各转向轴的理想转角关系图2所示是双前桥汽车转向时各转向轴的理想转角关系图,根据阿克曼原理,同一转向轴的内、外转角关系为:cot(N1)-cot(M1)=B/L1(1)不同转向轴的同一侧车轮的转角关系应满足:L1cot(N1)=L2cot(N2)(2)L1cot(M1)=L2cot(M2)(3)式中:N1、N2-汽车第一、二轴外侧轮转角;M1、M2-汽车第一、二轴内侧轮转角;L1、L2-汽车第一、二轴到转向中心线的距离;由(1)、(2)、(3)式便可得到:同一转向轴的内、外转角的函数关系及同侧车轮转角的函数关系。
重型载货汽车转向器设计摘要汽车转向系统分为机械式转向系统和动力力式式转向系。
其中动力式的是在机械转向器基础上发展的。
动力转向系统是一套兼用驾驶员体力和发动机动力为转向能源的转向系统。
在正常情况下,汽车转向所需的能量只有一小部分由驾驶员提供,而大部分能量由发动机通过转向加力装置提供。
但在转向加力装置失效时,一般还应当能由驾驶员独立承担汽车转向任务。
本文阐述了针对重型载货汽车转向器方案的确定,转向传动机构,转向操纵机构的选择,转向器的设计,转向器壳体设计,在给定前轴满载轴载质量、最高车速、轮胎规格、最小转弯半径等条件下,着重对整体循环球转向器的齿扇轴,转向螺杆,滑阀式常流液压助力转向助力系统的结构设计计算。
关键词:重型货车;整体转向器;传动机构;操纵机构;结构设计ABSTRACTAutomotive steering system is divided into the mechanical steering system and power steering system for automobile steering force. The dynamic type is based on the development of mechanical steering gear. Power steering system is a set of compatible driver physical and engine power steering system for energy. Under normal circumstances, the automobile steering required only a small fraction of the energy provided by the driver, and most of the energy from the engine through the steering device. But in the steering device failure, the general should also can by the driver steering task independently.This paper expounds the heavy truck steering determiner scheme, steering gear, steering mechanism selection, the design of steering device casing design, steering, front axle load in agiven quality of axial load, the maximum speed, tire specifications, minimum turning radius under the same conditions, the whole recirculating ball steering sector shaft, steering screw, valve type constant flow hydraulic power steering system structure design and calculation of powerKey words:Heavy goods vehicles; The steering gear; Transmission mechanism; Operating mechanism; Structural design第1章绪论1.1 概述汽车在行驶过程中,为了适应各种道路情况和行驶条件,经常需要改变行驶方向或修正行驶方向,如转向、超车和避让等。
因为动力缸活塞两侧的工作面积不同,应以较小一侧的
(4)式中, D为动力缸内径
图1 动力转向缸的布置L
D
F
F
1
L1
式中,压力p 一般在
3.2 控制阀的参数选择与设计计算
式中,为相对应预开隙 3.2.3 局部压力降Δ图 2 转向动力缸尺寸简图
10
s 1
e
B
t
滑阀结构简图
e e
e 1e 1e 1e 1
式中,为油液密度,kg/m
式中,Q为溢流阀限制下的油液最大排量
3.2.7 控制阀的泄漏量ΔQ
式中,δ为滑阀与阀
式中,F h
式中,T r为转向车轮的转向阻力矩。
反向作用性能指标=0.02
式中,D sw为方向盘直径;为方向盘转角;
转向灵敏度也可以用动力转向开始起作用时的方向;=10°。
大客车转向系统设计方法摘要:简要介绍大客车转向系统零件选型及匹配设计方法关键词:大客车;转向系统;设计方法;前言转向系统作为汽车的重要系统之一,直接决定着车辆的操纵稳定性,安全性。
而大客车作为大型生命载体,对转向系统可靠性要求更高,设计时来不得半点马虎,下面就以WG6120CHAE 型车辆转向系统设计为例从客车装配厂家的角度简要介绍一下大型客车转向系统的设计方法。
1、转向器的选型1.1根据前轴的轴荷选定方向机类型一般转向轴轴荷超过3.5吨,推荐使用动力转向器,动力转向器液压缸的缸径要求大于m 5.42(m 为前轴轴荷),对比厂家转向器的参数选择即可。
转向轴轴荷小于3.5吨的车辆,原则上可以不使用动力转向器,但应特别注意转向垂臂长度,车桥转向节上臂的回转半径,注意力矩计算,使转向盘不至沉重。
1.2国内转向器厂家一般根据转向轴轴来对应相关转向器产品,例如东风转向器厂IPS45的转向器对应的前轴是4.5吨,IPS55的转向器对应的前轴是5.5吨,IPS65的转向器对应的前轴是6.5吨,所以选型时可以直接对应选择就是了。
对于我司生产的WG6120CHAE 型车,因前轴载荷为6.5吨,所以选用了东风的IPS65型转向器,并根据布置形式选定了左旋左输出旋向,传动比为21.48:1,摇臂轴转角为±47.5°,方向盘总圏数为5.67圏。
IPS65型转向器2、转向系统匹配设计2.1确定内外轮转角,转向梯形及最大转弯直径选定转向器之后,我们首先要根据车辆的转弯直径的要求计算实际所需转向轮转角。
老标准以外轮中心画出来的轨迹为车辆的最大转弯直径,不太准确,新标准以通道圆直径不大于25m ,通道宽度不大于6.7米来定义转弯直径则更合WG6120CHAE 型车相关参数首先找出车轮的旋转中心,转向轮的旋转中心是主销延长线与地面的交点。
现求出左右转向轮旋转中心联线的距离:中L =销B +2×r ×tg ɑ=1974.4 ①式考虑了主销后倾角的轴距:轴L =L+ r ×sin β=6312.9 ②式计算车辆的外轮转角外β=ctg 内β+B/L ③式车辆最内点的最小转弯半径 内r =轴L / tg 外β-[B-( B-中L )/2] ④式车辆最外点的最小转弯半径 外r =22)()B r L L +++内前( ⑤式计算出车辆最外点的最小转弯半径后直接乘以2倍,便计算出了车辆的最大转弯直径,而通道宽度见下式:通道B =外r -[B L L r r -+-⨯2)(前外外] ⑥式对于WG6120CHAE 型车,我们设定前内轮转角为47°,那么依据①式和③式,我们可以算出前外轮转角为38.8° ,这可做为给车桥厂签订协议时转向梯形的依据。
哈尔滨工业大学本科毕业论文(设计)东风DFL1310载重车双前桥转向系统优化设计摘要汽车的双前转向桥转向轮产生异常磨损是较普遍的现象,本文以某型号的双前轴转向载货汽车技术参数作为研究对象,进行转向系统结构参数的优化,从而减少轮胎磨损。
首先根据该车型底盘改装手册中参数用CATIA建立三维运动模型,从而加深自己对该车型转向系统的理解并以此作为后续数学分析与建模的依据;接着通过运用数学知识从整体考虑双前桥系统转向机构,建立了参数化的汽车双前桥转向系统数学模型;然后运用MATLAB软件将数学模型进行编程并建立总体的优化目标函数以进行运算,最终得到了双前桥转向系统部分结构的优化参数,接着通过编写程序对优化后一轴及二轴内外轮转向半径与理论值进行对比分析,得出优化取得较好结果的结论;最后依据CATIA建立的三维模型用CAD绘制出二维工程图纸。
关键词:双前桥转向系统,CATIA三维建模,克曼原理,MATLAB优化仿真- I -哈尔滨工业大学本科毕业论文(设计)The double front axle of Dongfeng trucksteering System optimization designAbstractAuto double front axle steering knuckle steering wheel to generate abnormal wear is a more common phenomenon,this paper to a certain type of double front axle steering truck technology parameters as the research object,to the optimization of the structure parameters of the system,to reduce tyre wear.According to the vehicle chassis modification manual parameters to establish three-dimensional model with CATIA,so as to deepen their understanding of the vehicle steering system as the analysis and modeling of subsequent mathematical basis;then through the double front axle system using mathematical knowledge from the overall consideration of the steering mechanism,establish the double front axle steering system parametric mathematical model;then use the mathematical model with MATLAB software programming and the optimization objective function to establish the overall operation,finally got the optimized parameters of dual front axle steering system parts of the structure,and then through the preparation process of the optimized one axis and two axis wheel steering radius were compared with the theoretical value analysis,obtains success;finally,based on the 3D CATIA model established by CAD to draw the 2D engineering drawings.Key Words:Double front axle steering system,CATIA modeling,Ackerman principle,MATLAB simulation and optimization- II -哈尔滨工业大学本科毕业论文(设计)目录摘要 (I)Abstract (II)第 1 章绪论 (1)1.1 本课题研究目的和意义 (1)1.2 国内外研究现状概述 (2)1.3 本课题研究内容及技术方案 (3)1.4 本设计的特色 (4)第 2 章双前桥转向系统理论 (5)2.1 双前桥转向系统理论 (5)2.1.1 转向系统设计的基本要求 (5)2.1.2 双前桥转向系统结构 (6)2.1.3 两轴汽车转向时理想的内、外前轮转角关系 (7)2.1.4 双前轴转向汽车转向时的理想的同侧车轮转角关系 (8)2.2 本章小结 (10)第 3 章双前桥转向系统CATIA 运动模型 (11)3.1 CATIA软件介绍 (11)3.2 建立双前桥转向系统零部件三维模型 (12)3.2.1 建立一桥横梁三维数模 (12)3.2.2 建立一桥左、右转向节三维数模 (12)3.2.3 建立一桥转向节臂三维数模 (14)3.2.4 建立一桥左右转向梯形臂三维数模 (14)3.2.5 建立拉杆球头总成三维数模 (15)3.2.6 建立拉杆卡箍三维数模 (15)3.2.7 建立拉杆体三维数模 (16)3.2.8 建立转向器三维数模 (16)3.2.9 建立部分车架三维数模 (17)3.3 建立双前桥转向系统三维装配模型 (17)3.4 本章小结 (19)第 4 章双前桥转向系统的优化 (20)4.1 MATLAB软件介绍 (20)4.2 基于MATLAB的双前桥转向汽车转向机构运动模型 (20)- III -哈尔滨工业大学本科毕业论文(设计)4.2.1 双前桥转向理论 (20)4.2.2 双前桥转向系统数学模型的建立 (22)4.2.3 第一轴转向垂臂机构数学模型 (22)4.2.4 第二轴转向垂臂机构数学模型 (24)4.2.5 摇臂机构总模型 (24)4.2.6 梯形机构模型 (25)4.2.7 建立优化目标函数 (26)4.3 用Matlab进行仿真 (26)4.3.1 编写Matlab仿真程序 (26)4.3.2 编写Matlab调用程序 (28)4.3.3 用Matlab进行优化 (28)4.3.4 对优化结果进行仿真检验 (29)4.4 本章小结 (32)第 5 章平面二维图纸的绘制 (33)5.1 CAD软件简介 (33)5.2 绘制CAD工程图纸 (33)5.3 本章小结 (34)结论 (35)致谢 (36)参考文献 (37)- IV -哈尔滨工业大学本科毕业论文(设计)第1章绪论1.1本课题研究目的和意义当今社会,国家的经济飞速发展,人们生活水平越来越高出行也越来越离不开汽车。
重型载货汽车转向系统设计的研究摘要:重型载货汽车凭借着其极高的运输效率和低廉的运输成本优势,已成为了道路运输的第一选择,汽车转向系统关系着汽车基本的行驶安全,其对提高汽车操纵性和驾驶舒适性等都有重要的影响。
所以合理匹配并应用好重型载货汽车的转向系统,对于保证车辆的行驶安全而言至关重要。
本文分析了转向系统基本设计要求,介绍了汽车转向系统的类型,最后介绍了转向系和转向梯形的选择方案。
关键词:重型载货汽车;转向系统;转向器随着国内外经济的迅速增长,基础建设、物流等行业的发展势头也越来越猛,重型载货汽车凭借其极高的运输效率和相对便宜的运输成本优势,已经成为了公路运输的第一选择,这使得我国重载汽车的生产开发也变得越来越重要。
重型载货汽车使用者对车辆的要求也逐渐向驾驶舒适性、操纵稳定性和行驶时的安全性方向靠拢。
转向系统是重型载货汽车最主要的部分之一,是确定其自身安全特性的关键部件,转向特性的研究设计,以保证其良好的驾驶性能。
1 转向系统基本设计要求(1)为了保证车辆全部的车轮都不会侧滑,全部转向轮在汽车转向时都要绕瞬时转动中心旋转。
如果没有满足此标准,将会使轮胎磨损速度增加,从而大大降低了车辆的驾驶稳定性。
(2)当车辆转弯后,司机放开方向盘后,转向轮应自动回正到直行状态,并稳定行驶。
(3)车辆在行进时,方向盘不能出现晃动情况,且转向轮也不能突然自振。
(4)无论发生何种情况,转向轮都应该能做到尽可能的减小或消除其摆动。
(5)在确保车辆的高机动性的前提下,若车辆想要转弯,转向系统都应该能够快速响应、精确控制,从而在最大程度上减少它的转弯角度。
(6)当车辆应该转向时,司机应该能够手感良好的轻松完成转向。
(7)在车轮与障碍相撞后,应尽量减少其传给方向盘的反冲。
(8)汽车上应该有配有调节机构,用来消除因为磨损而形成的间隙。
(9)车辆遭受撞击时,当转向系统由于车架以及车体结构的扭曲,而使转向轴、转向轮同时向后移位时,转向系统应有防伤装置来阻止或减少其对驾驶员的损伤。
重载汽车双轴转向系统的设计与优化的开题报告1. 研究背景汽车双轴转向系统是指在汽车的前后两个转向系统上增加一个转向机构,来实现车身的双轴转向。
双轴转向系统分为前轴转向和后轴转向两种形式,可分别实现前后轮组的同向转向(若前轮右转,则后轮也同时右转),或者是相反方向的转向(若前轮右转,则后轮左转)。
双轴转向系统主要优点为提高车辆在低速行驶时的时效性和操控性,提高整车的稳定性和安全性。
目前,国内外汽车厂商已经广泛使用双轴转向系统,但是该系统的设计和优化仍存在一定的挑战。
例如,系统重量过大、制动时的稳定性和安全性未能得到有效保障等问题。
因此,通过研究和改进双轴转向系统的设计和优化,可以提高整车性能和安全性。
2. 研究目的和意义本文的研究目的在于探索双轴转向系统的设计和优化方法,提高整车性能和安全性,具体包括:(1)通过分析双轴转向系统的工作原理和特点,设计出更加高效、轻量化的系统结构。
(2)研究双轴转向系统在制动等特殊情况下的应对策略,提高整车的稳定性和安全性。
(3)优化双轴转向系统的控制策略,提高整车的操纵性和操控性。
通过优化设计和改进控制策略,双轴转向系统可以更加高效地工作,提高整车性能和安全性,同时也可为未来的新能源汽车发展提供技术支持。
3. 研究内容和方法主要研究内容包括:(1)双轴转向系统的工作原理和特点研究;(2)双轴转向系统的设计优化,包括结构设计和重量优化;(3)研究双轴转向系统在制动等特殊情况下的应对策略;(4)优化双轴转向系统的控制策略,提高整车的操纵性和操控性。
研究方法包括理论分析和计算机仿真。
通过理论分析,可以深入了解双轴转向系统的工作原理和特点,为系统设计和优化提供指导;通过计算机仿真,可以对系统进行模拟和优化,提高系统的可靠性和与其他系统的兼容性,同时也可以为后续实验研究提供重要数据支持。
4. 预期结果预期结果包括:(1)设计出更加高效、轻量化的双轴转向系统结构,提高整车性能和安全性;(2)在制动等特殊情况下,实现双轴转向系统的有效控制,确保整车的稳定性和安全性;(3)优化双轴转向系统的控制策略,提高整车的操纵性和操控性。
多轴重型全挂车机械液压全轮转向装置设计研究分析摘要:多轴重型全挂车机械液压全轮转向装置,在车辆低速运转状态下能够增强转向的灵活性,在车辆高速运转状态下可以增强转向的稳定性。
由此可见,对车辆全轮转向装置的设计直接关系着车辆的安全性能。
本文笔者将通过分析转向装置的动力学关系式,积极的建立其一个相关的优化模型,同时也可以使用负荷型的优化式算法,从而建立起一个标准的模型来进行求解,以此来表明该设计理念可以在一定程度上优化多轴重型全挂车的转向性能。
关键词:多轴重型全挂车;机械液压;转向装置;设计多轴重型全挂车,是专门用来运输整部分大件或者大型设备的一种平板车。
其被广泛应用在水利工程、土建施工、电力工程等施工领域。
由于多轴重型全挂车具有可拼接性与模块性,所以它可以运载超重或者超尺寸的货物。
对挂车使用机械液压转向,能够达到全轮转向的目的。
并且转向过程中要尽量的减少轮胎的平行滑动,避免造成不必要的磨损或者由轮胎滑动引起的一系列恶性事故。
为达到这种设计目的,本文将以5轴线重型全挂车的转向装置设计为例,建立相关的模型并对模型求解和检验,以确保模型具有实用性。
1 机械液压型全轮转向装置的大体构造在对多轴重型全挂车的转向装置进行优化设计前,我们首先应该详细了解该转向装置的大体构造。
只有了解了基本构造,才能设计出符合实际的转向装置。
通常意义上来说,转向装置是由转向油缸、转向横(纵)拉杆、转向控制板以及悬架臂等多种结构构成。
同时相应的转向性装置也是由其固定的轴进行固定的,其相应的固定轴上所出现的梯形是一个正转式梯形,其后边是反转型梯形。
不管是正转的梯形还是反转的梯形都是对实际的车轮来说的,如果和车轮的实际转向的一致的就是正转型梯形,反之则为反转梯形。
而整辆车的转向操作是通过转向架来进行总体操控的,再由转向纵拉杆以及转向控制板和转向横拉杆来驱动各个悬架臂,以保障所有的车轮都按照需要的转角进行偏转。
假如车的轴数繁多的话,可以尝试用牵引杆带动的机械转向机制同液压随动机制配合起来进行全轮转向,只有这样才能真正达到机械转向以及车辆的转向同时进行的最终目的。