最新仪表着陆系统
- 格式:ppt
- 大小:2.46 MB
- 文档页数:42

航空知识 AVIATION KNOWLEDGE中国航班 CHINA FLIGHTS26NM7000B 型仪表着陆系统航向信标室外天线故障该如何处理文马建新NM7000B 型仪表着陆系统属于一种盲降系统,由于系统一经使用,便会处于不间断工作状态中,随着时间的推移,会出现老化情况,进而导致系统精密度严重下降,引发系统故障的产生,对飞行器的安全飞行造成了较大的影响。
仪表着陆系统被广泛应用于国际民航组织上,目前,有很大一部分民航组织上均使用该种系统,系统的应用情况直接关系到飞机的落地,由航向信标、下滑新标、指点信标三部分内容构成。
航向信标作为一项引导信号,由延长线水平方向及覆盖跑道构成,共包含十对室外天线对外辐射,当天线出现故障后,将会对仪表着陆系统的正常使用造成较大的影响。
为了防止航班延误事件的产生,及时寻找及排除故障成为现阶段一项亟待解决的问题。
NM7000B 型仪表着陆系统工作原理航向信标工作原理。
航向信标主要是指为飞行器提供跑道及跑道延长线水平引导信号,信号由两个辐射磁场构成,辐射场中所调制出来的幅度具有一致性,一般我们将其称为是航道。
当飞机处于航道上时,机载设备会提供正确指示信息,若飞机偏离跑道,会接收到纠正信息。
由遥控单元、天线阵系统、航向主机及远程监控维护系统共同来组成航向信标。
下滑信标原理。
下滑信标的主要作用是为着陆飞机提供下滑道信息,将此角度称之为是下滑角,为飞行器提供跑道及其延长线垂直方向的引导信号,由两个磁场来组成此信号。
飞机处于下滑道上,会接收到来自于机载设备中的信号。
若飞机偏离于下滑道上方位置时,会接收到“向下纠正”信号。
当飞机偏离于下滑道下方时,会接收到“向上纠正”信号。
由天线系统、下滑主机、远程监控维护系统、遥控单元及电源共同来组成下滑信标系统。
NM7000B 型仪表着陆系统航向信标室外天线故障排查机房至天线阵电缆。
将ILS航空知识AVIATION KNOWLEDGECHINA FLIGHTS 中国航班27机柜内的输入输出电缆断开,使用万用表对ADU 及MCU 中的电缆电阻进行测试,经测量可知电阻值为无限大。
中国民用航空仪表着陆系统Ⅱ类运行规定第一章总则第一条为了保障民用航空仪表着陆系统Ⅱ类运行安全和有秩序地实施,制定本规定。
第二条本规定适用于民用机场实施的仪表着陆系统Ⅱ类运行(以下简称Ⅱ类运行)。
第三条凡从事民用航空活动的单位均应依据本规定制订Ⅱ类运行实施细则和工作程序。
第四条本规定中下列用语的含义为:(一)精密进近:使用仪表着陆系统(ILS)、微波着陆系统(MLS)或精密进近雷达(PAR)提供方位和下滑引导的仪表进近。
(二)非精密进近:使用全向信标台(VOR)、导航台(NDB)或航向台(LLZ,或ILS下滑台不工作)等地面导航设施,只提供方位引导,不具备下滑引导的仪表进近。
(三)机场运行最低标准:机场适用于起飞或着陆的限制,对于起飞,用能见度(VIS)或跑道视程(RVR)表示,如果需要应包括云高;对于精密进近着陆,用能见度(VIS)或/和跑道视程(RVR)和决断高(DH)表示;对于非精密进近着陆,用能见度(VIS)、最低下降高(MDH)和云高表示。
(四)超障高(OCH):以跑道入口的标高平面为测算高的基准,按照适当的超障准则确定的最低高。
(五)决断高(DH):在精密进近中,以跑道入口的标高平面为基准规定的高,航空器下降至这个高,如果不能取得继续进近所需的目视参考,必须开始复飞。
(六)能见度(VIS):白天能看到和辨别出明显的不发光物体或晚上能看到明显的发光物体的距离。
(七)跑道视程(RVR):航空器在跑道中线上,驾驶员能看到跑道道面标志或跑道边灯或中线灯的最大距离。
(八)精密进近和着陆运行类别Ⅰ类(CATI)运行:决断高不低于60米(200英尺),能见度不小于800米或跑道视程不小于550米的精密进近和着陆。
Ⅱ类(CATⅡ)运行:决断高低于60米(200英尺),但不低于30米(100英尺),跑道视程不小于350米的精密进近和着陆。
ⅢA类(CATⅢA)运行:决断高低于30米(100英尺),或无决断高,跑道视程不小于200米的精密进近和着陆。

仪表着陆系统工作原理仪表着陆系统(Instrument Landing System,简称ILS)是一种基于雷达和无线电导航技术的自动着陆辅助系统,用于帮助飞行员在恶劣天气条件下进行精确的着陆。
ILS由三个主要组件组成:1. 放导航信号的地面设备:这个设备通常被称为“局部器”(Localizer),它通过无线电信号发射和导航系统通信。
局部器发射两个信号,水平信号和垂直信号,协助飞行员控制飞机的水平和垂直位置。
飞行员可以通过接收这些信号来确保飞机在正确的航向和下降路径上。
2. 安装在飞机上的接收设备:在飞机上安装了称为接收局部器信号的接收设备。
接收设备接收地面发出的信号,并将其显示在驾驶舱的显示器上。
飞行员通过这个显示器来确定飞机的位置和航向,以便进行准确的着陆。
3. 自动着陆系统(Autoland System):许多现代飞机可以配备自动着陆系统,它使用ILS技术并结合自动驾驶系统,可以在没有飞行员干预的情况下完成整个着陆过程。
自动着陆系统监测ILS信号,并通过控制飞机的引导系统和动力系统来自动调整飞机的飞行姿态和速度,确保精确地着陆。
ILS的工作原理是基于地面设备发射的无线电信号和飞机上的接收设备接收信号。
地面设备发射水平和垂直信号,飞机上的接收设备接收这些信号,并将其显示在驾驶舱的显示器上。
飞行员使用这些信号来导航飞机,以确保飞机安全地降落在目标跑道上。
ILS是民用和军用飞机着陆过程中一项重要的辅助技术,可以大大提高飞行员在恶劣天气条件下的着陆能力。
除了上述提到的基本工作原理外,仪表着陆系统还有其他一些相关的技术和功能。
首先,仪表着陆系统通常配备了仪表陀螺系统,用于提供飞机的姿态和水平信息。
这些信息对于飞行员来说至关重要,因为在低能见度条件下,他们无法依赖外界视觉进行导航和操控。
仪表陀螺系统可以通过加速度计和陀螺仪测量飞机的滚转、俯仰和偏航信息,并将其显示在仪表板上,帮助飞行员保持飞机的平稳飞行。
仪表着陆系统(ILS)简介ILS的原理ILS的作用和历史仪表着陆系统ILS(Instrument Landing System)是“非目视”进近和着陆的标准助航系统。
它为飞机提供对准跑道的航向信号和指导飞机下降的下滑道信号,再加上适当的距离指示信号,使飞机能在低的能见度和恶劣天气条件下借助这些仪表提供的信号指示就可以安全着陆。
随着新技术和新器件在ILS上的应用,ILS所提供的精确导航信号使得全天候的着陆成为可能。
为了着陆飞机的安全,在目视着陆飞行条例(VFR)中规定,目视着陆的水平能见度必须大于4.8Km,云底高不小于300M。
在很大一部分机场的气象条件都不能满足这一要求,这时着陆的飞机必须依靠ILS提供的引导进行着陆。
ILS是采用“等信号”原理来实现的,即通过比较两个信号的幅度差来给出左右和上下指示,当飞行器处于指定航线时,两个信号幅度相等,差值为零。
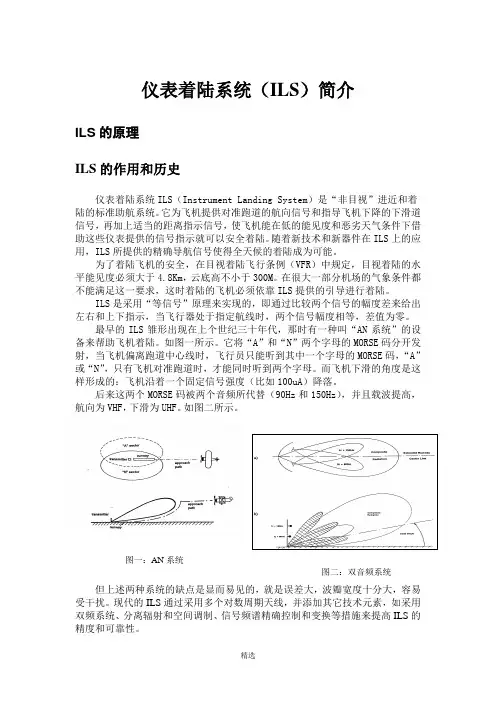
最早的ILS雏形出现在上个世纪三十年代,那时有一种叫“AN系统”的设备来帮助飞机着陆。
如图一所示。
它将“A”和“N”两个字母的MORSE码分开发射,当飞机偏离跑道中心线时,飞行员只能听到其中一个字母的MORSE 码,“A”或“N”,只有飞机对准跑道时,才能同时听到两个字母。
而飞机下滑的角度是这样形成的:飞机沿着一个固定信号强度(比如100uA)降落。
后来这两个MORSE 码被两个音频所代替(90Hz 和150Hz ),并且载波提高,航向为VHF ,下滑为UHF 。
如图二所示。
但上述两种系统的缺点是显而易见的,就是误差大,波瓣宽度十分大,容易受干扰。
现代的ILS 通过采用多个对数周期天线,并添加其它技术元素,如采用双频系统、分离辐射和空间调制、信号频谱精确控制和变换等措施来提高ILS 的精度和可靠性。
图一:AN 系统图二:双音频系统ILS的有关述语决断高度(DH):ILS引导飞机到达飞行员能看见跑道的最低允许高度,在这个高度上,驾驶员必须做出继续着陆还是复飞的决定。

仪表着陆系统三类标准
仪表着陆系统(ILS)的三类标准如下:
一类盲降:这是最低标准的盲降方式,适用于前方能见度不低于800米或跑道视程不小于550米的情况,此时着陆决断高度不应低于60米。
1
二类盲降:在这种条件下,能见度为400米或跑道视程不小于350米时,着陆决断高度不应低于30米。
三类盲降:这是一种更高级别的盲降方式,分为三个子类别:
IIIA类:在这种情况下,能见度为200米,且云比高不超过15米;决断高度为15米。
如果飞行员能够清晰看到跑道并确认可以降落,则可以进行降落;如果不确定,则需要复飞。
IIIB类:能见度降至50米,且云比为零;这种情况下没有固定的决断高度,飞行员需要根据实际情况判断是否能降落,同样需要复飞。
IIIC类:这是最极端的一种情况,能见度和云比都为零,
意味着在任何情况下都不能进行降落,只能复飞。
仪表着陆系统(ILS )简介ILS 的原理ILS 的作用和历史仪表着陆系统ILS (Instrument Landing System )是“非目视”进近和着陆的标准助航系统。
它为飞机提供对准跑道的航向信号和指导飞机下降的下滑道信号,再加上适当的距离指示信号,使飞机能在低的能见度和恶劣天气条件下借助这些仪表提供的信号指示就可以安全着陆。
随着新技术和新器件在ILS 上的应用,ILS 所提供的精确导航信号使得全天候的着陆成为可能。
为了着陆飞机的安全,在目视着陆飞行条例(VFR )中规定,目视着陆的水平能见度必须大于4.8Km ,云底高不小于300M 。
在很大一部分机场的气象条件都不能满足这一要求,这时着陆的飞机必须依靠ILS 提供的引导进行着陆。
ILS 是采用“等信号”原理来实现的,即通过比较两个信号的幅度差来给出左右和上下指示,当飞行器处于指定航线时,两个信号幅度相等,差值为零。
最早的ILS 雏形出现在上个世纪三十年代,那时有一种叫“AN 系统”的设备来帮助飞机着陆。
如图一所示。
它将“A ”和“N ”两个字母的MORSE 码分开发射,当飞机偏离跑道中心线时,飞行员只能听到其中一个字母的MORSE 码,“A ”或“N ”,只有飞机对准跑道时,才能同时听到两个字母。
而飞机下滑的角度是这样形成的:飞机沿着一个固定信号强度(比如100uA )降落。
后来这两个MORSE 码被两个音频所代替(90Hz 和150Hz ),并且载波提高,航向为VHF ,下滑为UHF 。
如图二所示。
但上述两种系统的缺点是显而易见的,就是误差大,波瓣宽度十分大,容易受干扰。
现代的ILS 通过采用多个对数周期天线,并添加其它技术元素,如采用双频系统、分离辐射和空间调制、信号频谱精确控制和变换等措施来提高ILS 的精度和可靠性。
图一:AN 系统图二:双音频系统ILS的有关述语决断高度(DH):ILS引导飞机到达飞行员能看见跑道的最低允许高度,在这个高度上,驾驶员必须做出继续着陆还是复飞的决定。
仪表着陆系统仪表着陆系统(Instrument Landing System, ILS) 又译为仪器降落系统,盲降系统,是应用最为广泛的飞机精密进近和着陆引导系统。
它的作用是由地面发射的两束无线电信号实现航向道和下滑道指引,建立一条由跑道指向空中的虚拟路径,飞机通过机载接收设备,确定自身与该路径的相对位置,使飞机沿正确方向飞向跑道并且平稳下降高度,最终实现安全着陆。
盲降是仪表着陆系统ILS的俗称。
因为仪表着陆系统能在低天气标准或飞行员看不到任何目视参考的天气下引导飞机进近着陆,所以人们就把仪表着陆系统称为盲降,即飞行员在肉眼无法看清机场跑道的情况下操控航班降落。
1.简介仪表着陆系统是飞机进近和着陆引导的国际标准系统,它是二战后于1947年由国际民航组织ICAO确认的国际标准着陆设备。
全世界的仪表着陆系统都采用ICAO(国际民用航空组织,国际民航组织,International Civil Aviation Organization)[1]的技术性能要求,因此任何配备盲降的飞机在全世界任何装有盲降设备的机场都能得到统一的技术服务。
“盲降”一词即使对经常坐飞机的人来说也有些陌生,它是普通旅客接触不到的航空专有名词,并非字面意思“闭着眼睛降”或“盲目降落”。
盲降是仪表着陆系统ILS的俗称,在低能见度天气时,地面导航台与机载设施建立相关后,系统可由自动驾驶仪完成对准跑道及后续着陆等行为。
有别于天气正常时的“目视进场”,此方式依靠仪表着陆系统引导飞机进近着陆,可理解为“不依赖眼睛”即称“盲降”。
仪表着陆系统通常由一个甚高频(VHF)航向信标台、一[3]个特高频(UHF)下滑信标台和几个甚高频(VHF)指点标组成。
航向信标台给出与跑道中心线对准的航向面,下滑信标给出仰角2.5°—3.5°的下滑面,这两个面的交线即是仪表着陆系统给出的飞机进近着陆的准确路线。
指点标沿进近路线提供键控校准点即距离跑道入口一定距离处的高度校验,以及距离入口的距离。
ILS导航台精密进近程序是指利用那些导航精度高,而且既能提供方位信号,又能提供下滑道信号的导航设备设计的仪表进近程序。
目前,能够作为精密进近程序的导航设备有仪表着陆系统(ILS)、微波着陆系统(MLS)、精密进近雷达(PAR)以及由全球导航卫星系统提供垂直引导的进近(GNSS APV)。
目前我国主用的精密进近导航设备是仪表着陆系统(ILS)。
仪表着陆系统的地面系统由航向台(Localizer)、下滑台(Glide Slope)、指点信标(Marker)和灯光系统四个部分组成。
仪表着陆系统的机载系统是由无线电接收机和仪表组成,它的任务是给驾驶员指示出跑道中心线并给出按照规定的坡度降落到跑道上的路径。
1.ILS导航台的组成及其布局(1)航向台LLZ:Localizer航向台由一个甚高频发射机、调制器、分流器及天线阵组成。
航向台的天线安装在跑道末端的中心延长线上,通常距跑道末端400至500m。
航向台发射两个等强度的无线电波束,称为航向信标波束,使用的频率为108.10~111.95MHz,两个波束分布在沿跑道中心线的两侧,使用两种调幅频率,左侧是90Hz调幅,右侧是150Hz调幅。
如果飞机的接收机收到的两个电波强度相等,机上的ILS仪表指针指在正中,说明飞机飞在跑道中心线向上延伸的垂直平面上,飞机可沿着波束方向准确地在跑道中线上着陆。
􀂄在LLZ的有效范围内,驾驶员即可根据飞行仪表(HIS、ADI)的指示,使航空器切入航道对准跑道中心线飞行。
(2)下滑台GS:Glide Slope下滑台由超高频发射机、调制器和上、下天线等组成。
下滑台的天线安装在跑道入口内的一侧,一般距入口250m前后,与跑道中心线的横向距离为150m左右。
该设备能产生一个与跑道平面成一定角度的下滑面。
该下滑面与航向道相结合形成一个下滑道。
下滑道在跑道入口处的高称为ILS基准高(RDH),其数值为15±3m(标准15m)。