基于颤振效应的气动比例阀摩擦力补偿研究
- 格式:pdf
- 大小:171.78 KB
- 文档页数:3

《基于参数辨识的比例阀非线性摩擦自适应补偿控制》篇一一、引言在现代工业控制系统中,比例阀作为一种重要的执行元件,广泛应用于各种液压、气动和电控系统中。
然而,由于比例阀在实际运行过程中受到多种因素的影响,如非线性摩擦、温度变化、压力波动等,导致其控制精度和稳定性受到一定程度的限制。
为了提高比例阀的控制性能,本文提出了一种基于参数辨识的比例阀非线性摩擦自适应补偿控制方法。
二、问题描述比例阀的非线性摩擦特性是影响其控制性能的主要因素之一。
传统的控制方法往往忽略了这种非线性摩擦的影响,导致系统在运行过程中出现抖动、超调等不稳定现象。
为了解决这一问题,需要采用一种能够自适应补偿非线性摩擦的控制方法。
三、方法与原理本文提出的控制方法主要包括参数辨识和自适应补偿两个部分。
首先,通过参数辨识技术对比例阀的非线性摩擦特性进行准确描述,得到其数学模型。
然后,根据该模型设计一种自适应补偿控制器,实现对非线性摩擦的实时补偿。
1. 参数辨识参数辨识是本文方法的基础。
通过在比例阀的不同工作状态下进行试验,获取其输入输出数据。
然后,利用数学方法对这些数据进行处理和分析,得到比例阀的非线性摩擦特性的数学模型。
这个模型能够准确描述比例阀在不同工作条件下的非线性摩擦特性,为后续的控制器设计提供依据。
2. 自适应补偿控制器设计根据参数辨识得到的数学模型,设计一种自适应补偿控制器。
该控制器能够根据比例阀的实际工作状态,实时调整其输出,以实现对非线性摩擦的补偿。
具体来说,当比例阀受到非线性摩擦的影响时,控制器能够快速感知并计算出相应的补偿量,然后通过调整输出电压或电流等参数,使比例阀的输出与期望值保持一致。
四、实验与结果分析为了验证本文提出的控制方法的有效性,我们进行了大量的实验。
实验结果表明,采用基于参数辨识的比例阀非线性摩擦自适应补偿控制方法后,比例阀的控制精度和稳定性得到了显著提高。
与传统的控制方法相比,该方法能够更好地抑制系统抖动、减小超调量等不稳定现象,从而提高系统的整体性能。

比例阀消除震颤方法我折腾了好久比例阀消除震颤方法,总算找到点门道。
我一开始对比例阀的震颤真是毫无头绪。
我就试着从最基础的地方查起,查了好多资料,那些资料里全是些理论,什么流量特性啊,压力补偿啊,看得我头晕脑胀的。
我当时就想,这些理论到底怎么用在消除震颤上呢。
我先试着调整比例阀的增益,觉得调高或者调低增益没准能行。
我就一通乱调,结果不仅没消除震颤,反而有时候让整个系统更不稳定了。
我这才意识到,不能这么盲目地调。
就像做菜一样,盐加多了可不行,你得一点一点来。
后来我又研究比例阀的阀芯,觉得阀芯如果有点卡顿之类的可能会引起震颤。
我就把比例阀拆开来看看,当然这得小心,毕竟这是个精密的东西。
我看了看阀芯表面,没发现有什么明显的伤痕啊堵塞之类的。
但是这时候我犯了个错,在重新安装的时候没按照原来的顺序和安装规范来,结果导致比例阀直接出故障了。
这给我一个很大的教训,做这种事得特别仔细。
再后来,我又重新查资料,发现电信号也可能影响到比例阀的稳定,从而产生震颤。
我就试着优化比例阀的驱动电路。
这个过程可复杂了,就像你在迷宫里找出口似的,一点点测试电路的各个部分。
我测试了电源电压的稳定性等,还试着加了些滤波电路。
这个滤波电路就像一个筛子,把那些不干净不稳定的电信号给过滤掉。
现在我还不能确定是不是这些方法就完全可以解决所有比例阀震颤的问题。
但我觉得从我的尝试来看,如果要消除比例阀的震颤,首先要小心翼翼地检查机械部分,就像看阀芯这些地方有没有问题。
然后呢就是得小心操作。
在调整增益或者弄电路的时候,一定要慢慢地逐步进行。
不能像我一开始那样莽撞。
如果觉得是电信号导致的,那认真地检查驱动电路,加上滤波电路确实会有很大的改善。
反正就是每次调整都做好记录,这样就算出了问题也能知道是在哪里出的错,重新调整回来。
我还打算继续研究,看还有没有更好的办法,不过目前这些尝试,可以给同样遇到这个问题的人一些参考。
基于正弦颤振信号发生器实现新型电液比例控制器的方案设计随着机电液一体化技术的发展,电液比例控制技术的应用越来越广泛。
电液比例控制系统范围较广,在液压传动与控制过程中,系统能够接受模拟信号或数字信号,使输出的流量或压力连续成比例地变化,都属于此类。
该控制系统的优点是充分利用了液压控制与电气控制的长处,即功率传递靠液压,信号处理靠电气的优化措施。
电液比例控制原理与要求液压控制系统中两个重要的被控参数是压力与流量,而控制上述两个参数的基本手段是对流阻进行控制。
目前生产上实用的可控流阻结构形式主要是机——液控制式的间隙型流阻。
它利用控制固体部件的运动或变形来实现对流阻的控制,而这种运动或变形大多采用电磁式设计,利用电磁力与弹簧力相互平衡原理来改变可控流阻的液阻。
完成这一功能的电磁铁亦称作比例电磁铁。
由于它结构尺寸一般比较大,所以运动惯性和磁滞也大,存在粘滞摩擦等影响比例阀性能响应的因素。
为了减小磁滞和摩擦力对比例阀性能的响应,通常需要在控制信号中叠加颤振信号,比如正弦波或三角波,其频率一般为100Hz~200Hz,振幅约为额定控制信号的10%~20%。
这里就介绍一种新型的电液比例控制器设计。
正弦颤振信号发生器一个正交振荡器,它可以产生两个相差90°的正弦波,即一个正弦波,一个余弦波。
当取R1=R2=10 K,C1=C2=C3=0.1μF时,根据颤振频率f0=100~200Hz的要求,R3的调节范围由式(4)可得:控制信号的产生比例阀的直流控制电压UD与正弦颤振信号Ui通过反相加法运算电路进行叠加,为了满足相位要求,其后又增加反相器。
其中:输出电路输出电路是将控制电压信号转换成比例阀线圈的直流电流输出。
电流的表达式应为:R0、L0分别为比例阀线圈的电阻与电感,Uip即为式(10)所示的控制信号。
假设IC是理想的运算放大器,则在T点和F点各自电流总和为零,则在同相输入端T点,有:在反相输入端F点有:式中:ID——直流电流的控制分量,单位AIm——颤振电流幅值,单位Aω0——颤振电流角频率,单位1/sID、Im及ω0应根据比例阀的技术参数与电路结构进行计算调整。

颤振信号对比例多路阀流量波动的影响研究艾超;林加城;孔祥东;李艳鹏;宋豫【摘要】为了提高比例多路阀输出流量的稳定性,以负载敏感比例多路阎为研究对象,利用Stribeck模型分析了摩擦颤振补偿机理,采用功率键合图理论搭建了先导阀-主阀数学模型,利用该模型并结合对该模型的仿真获得了颤振信号作用下该阀的稳态特性,最后通过试验研究和功率谱分析验证了颤振信号对比例多路阀流量波动的影响规律.研究结果表明:比例多路阀的流量波动程度随颤振信号频率的增大而减小且减小幅度不断降低,随颤振信号振幅的增大而增大且两者近似呈线性关系;波动频率和颤振信号频率保持一致.可适度提高颤振信号的频率或降低其幅值,以提高比例多路阀输出流量稳定性,实现执行机构平稳运行.研究结果为比例多路阀的研究和性能优化提供了参考依据.【期刊名称】《高技术通讯》【年(卷),期】2015(025)006【总页数】8页(P631-638)【关键词】比例多路阀;键合图理论;颤振信号;摩擦补偿;流量波动【作者】艾超;林加城;孔祥东;李艳鹏;宋豫【作者单位】先进锻压成型技术与科学教育部重点实验室(燕山大学) 秦皇岛066004;燕山大学河北省重型机械流体动力传输与控制实验室秦皇岛066004;浙江大学流体动力与机电系统国家重点实验室杭州310027;燕山大学河北省重型机械流体动力传输与控制实验室秦皇岛066004;先进锻压成型技术与科学教育部重点实验室(燕山大学) 秦皇岛066004;燕山大学河北省重型机械流体动力传输与控制实验室秦皇岛066004;浙江大学流体动力与机电系统国家重点实验室杭州310027;燕山大学河北省重型机械流体动力传输与控制实验室秦皇岛066004;燕山大学河北省重型机械流体动力传输与控制实验室秦皇岛066004【正文语种】中文多路阀具有结构紧凑、管路连接简单、压力损失小等优点,广泛应用在农业机械、矿山机械和工程机械等装备液压系统上[1-4]。
基于Knocker的气动调节阀摩擦的在线补偿法
陈兴武;狄海瑞;于涛
【期刊名称】《电大理工》
【年(卷),期】2013(000)001
【摘要】气动调节阀的摩擦补偿问题是一个重要的研究课题,本文主要在
Hagg1und提出的方法上进行改进,使用一种基于“knocker”的方法对气动调节阀进行摩擦在线补偿,并通过仿真研究表明其有效性.
【总页数】3页(P12-14)
【作者】陈兴武;狄海瑞;于涛
【作者单位】沈阳鼓风机集团股份有限公司,沈阳110869;辽河油田金东油气工程有限公司,盘锦124010;抚顺北方化工有限责任公司,抚顺113109
【正文语种】中文
【相关文献】
1.气动调节阀摩擦的检测与诊断 [J], 宗学军;金辉
2.在线诊断在气动调节阀缺陷处理中的应用 [J], 李开盈;王玉彬;吕培军;陈松;邱波
3.一种基于PCA和贝叶斯分类的气动调节阀故障诊断方法 [J], 王印松; 吴军超
4.基于Fluent的凝结水气动主调节阀防空化设计验证 [J], 祝欣慰;骞宏伟;陈宝;蒋永兵;颜炳良;谌传江
5.气动调节阀阀套相贯孔与阀芯的微间隙往复式动态摩擦特性 [J], 许静;倪敬;陈烨波;金永涛;吴参
因版权原因,仅展示原文概要,查看原文内容请购买。
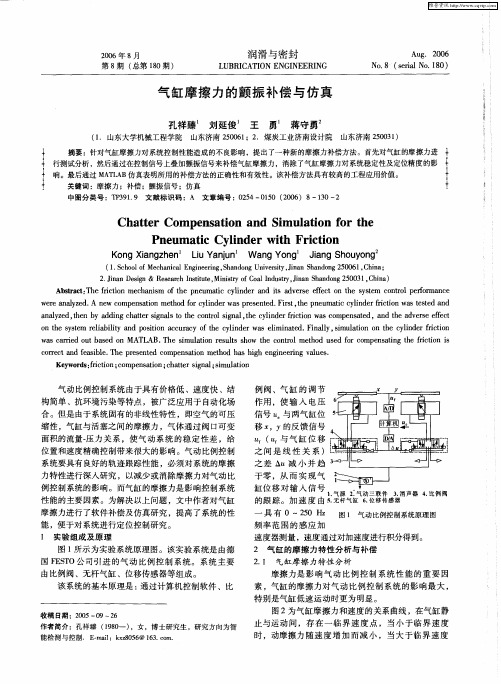
1 气动比例系统摩擦力特性及补偿分析摩擦力补偿有两个主要途径,即颤振控制和脉冲控制。
颤振控制是在控制信号上叠加一个高频不等幅的信号。
主要思想是颤振信号的幅值足够大以克服摩擦力,并且频率足够高以使在系统信号的频率范围上产生扰动。
由于从控制阀的输出幅值在很大程度上受到限制,因此,不可能产生一个高频压力信号加在气缸上,即使可能的话,结果也会使阀受到很大的磨损。
对于脉冲控制,同样的,由于动力学因素和气缸的限制,不可能产生加在气缸上的高频压力信号。
所以要补偿比例系统的摩擦力,必须使用除上述两种方法之外的其他方法。
理想的摩擦补偿是在控制信号的变化方向上叠加脉冲信号的函数,每个脉冲都有足够的能量以消除静态摩擦。
如果能量过小,阀会处于锁紧状态。
如果能量过大,阀的滑动量就会超过所需的范围。
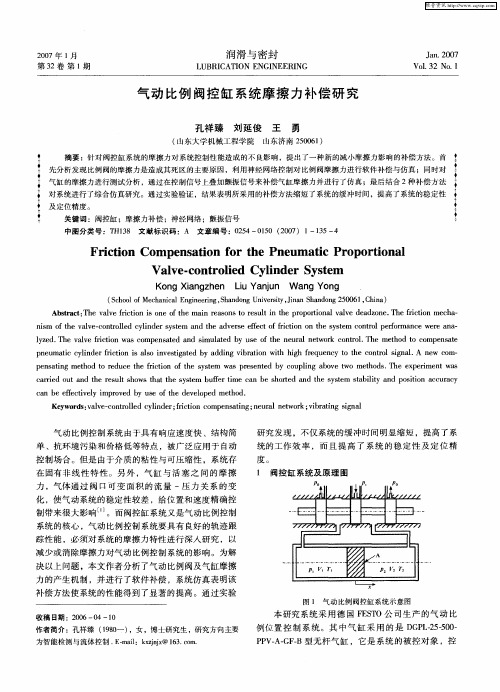
2 实验系统组成和原理本实验系统主要由无杆气缸、比例控制阀、位移传感器、A/D、D/A转换装置和计算机等组成。
气缸采用DGPL-25-500-PPV- A-GF-B型无杆气缸,是系统的被控对象,目的是实现活塞位移按给定规律变化。
传感器为MLO-POT-500-TLF型电位计式模拟位移传感器,是系统的反馈检测元件,在线检测活塞位移,输出电压随测量位置在0~10V之间连续变化。
比例阀采用MPYE-5-1/8-010B型3位5通比例阀,作用是把电信号转化为气动信号,驱动气缸活塞动作。
A/D、D/A转换由HY-6070通用数据采集控制板完成。
一览泵阀英才网用心专注、服务专业实验系统的工作原理:通过计算机软件对比例阀、无杆气缸的控制调节作用,使输入电压信号与气缸位移反馈信号 ( 与气缸位移是线性关系)之差减小并趋于零,从而实现气缸位移对输入信号的跟踪。
一览泵阀英才网用心专注、服务专业。