非序列面光线追迹
- 格式:pdf
- 大小:696.18 KB
- 文档页数:25
![[说明]lighttools中文说明](https://img.taocdn.com/s1/m/1a8f5ccc5acfa1c7ab00cc71.png)
[说明]lighttools中文说明第一章介绍翻译:郑一狼照明作为光学领域中的一个重要部分,对于很多公司和它们的产品来说正变得越来越重要。
可是,直到现在对于照明系统设计和分析来说还没有可供广泛选择的专业软件,能够应用于照明系统的软件也很难使用。
正因为如此,目前照明系统的设计通常是建立系统的模型然后测试此模型。
LightTools的照明模块是为了满足照明行业的需要而编写的。
它通过计算机建模对照明系统进行精确的定量分析,从而帮助你更加快速有效的开发照明产品。
一.什么是LightTools照明模块,LightTools照明模块是LightTools核心模块的可选的扩展模块。
它使用非序列性光线追迹并且基于元件进行建模,帮助你模拟完整的光学系统,包括系统的光源、光学元件和机械结构。
LightTools照明模块完全与LightTools核心模块相结合,并且添加了新的菜单和命令。
因为两个模块是相互结合的,一旦你熟悉了LightTools核心模块,那么在你了解了LightTools照明模块的一些特性后,将很快能够使用LightTools照明模块。
如果你是使用LightTools的新手,那么我们推荐你在学习LightTools照明模块之前先熟悉LightTools核心模块,以此来熟悉LightTools的基本特性和操作。
LightTools照明模块使用非序列性光线追迹,这点和2D及3D设计视图是一致的,但是和Imaging Path模块不一样,Imaging Path模块只使用序列性光线追迹。
二(照明系统基础大部分照明系统拥有以下这些特性,所有以下这些特性都可以在LightTools中被模拟。
, 系统有一个或更多的照明光源,通常成一定角度并且不均匀地分布在三维空间中。
, 我们需要在系统的若干位置分析照度。
, 我们需要分析远场的发光强度。
, 我么需要创建不同的曲面属性,包括菲涅尔损失和散射特性。
, 我们需要进行非序列性光线追迹,对于照明计算可能更适宜使用蒙特卡洛类型随机光线追迹。

牛顿迭代法光线追迹法-概述说明以及解释1.引言1.1 概述牛顿迭代法和光线追迹法是两种常用的数值计算方法,在计算机图形学和其他领域中具有重要的应用。
牛顿迭代法是一种求解方程的方法,通过不断迭代逼近函数的根,从而得到方程的解。
光线追迹法则是模拟光线在物体表面的反射、折射和投射等行为,用于生成逼真的光线效果。
牛顿迭代法通过利用方程的切线逼近根的方法,具有快速收敛的特点,精确地寻找方程的解。
它在优化问题、非线性方程求解等领域有广泛的应用。
牛顿迭代法的基本原理是利用函数的切线与x轴的交点作为下一次迭代的起点,通过多次迭代逐步逼近方程的根。
光线追迹法则是基于光线的物理性质进行计算和模拟,用于生成逼真的光线效果。
它模拟了光线在物体表面的反射、折射和透射等行为,通过追踪光线的路径,计算光线与物体的交点和光线的颜色等信息,从而生成逼真的光线效果。
光线追迹法在计算机图形学、光学设计等领域得到广泛应用,可以用于生成真实感的渲染图像和模拟光学系统的行为。
牛顿迭代法和光线追迹法都是基于数学模型和物理规律的计算方法,在不同的应用领域具有重要的作用。
本文将介绍它们的原理、算法步骤和应用场景,并对它们进行对比分析和评价,探讨它们的优缺点和发展前景。
这将有助于我们更深入地理解这两种方法,并为相关领域的研究和应用提供参考。
文章结构部分的内容应该是对整篇文章的结构做出详细介绍。
可以描述每个部分的主题和内容,并概述它们在文章中的作用和相互关系。
例如,可以按照以下方式编写文章结构部分的内容:"1.2 文章结构本文将分为四个主要部分来介绍牛顿迭代法和光线追迹法的原理、算法步骤和应用场景,以及对两种方法的对比分析、优缺点和发展前景。
具体结构如下:2. 牛顿迭代法2.1 原理2.2 算法步骤2.3 应用场景3. 光线追迹法3.1 原理3.2 算法步骤3.3 应用场景4. 结论4.1 对比分析4.2 优缺点4.3 发展前景通过以上结构,本文将分别介绍牛顿迭代法和光线追迹法的原理、算法步骤和应用场景,以便读者更好地理解和应用这两种方法。

ZEMAX中如何能优化非序列光学系统
要优化非序列光学系统,在ZEMAX中可以通过以下步骤进行操作:
1.打开ZEMAX软件并在工作区中创建一个新的光学系统。
2.在系统设置中,选择非序列模式。
这将允许你在光学系统中添加和
优化非序列组件。
3.添加所有非序列光学元件到系统中。
你可以通过从元件库中拖动和
放置元件来完成这一步骤。
4.对系统进行初始设置,包括设置光源、检测器和其它系统参数。
5.进行优化。
ZEMAX提供了多种优化方法,如全局优化、局部优化、
灵敏度分析等。
你可以选择适合你系统的优化方法,并设置参数进行优化。
6.分析优化结果。
ZEMAX将根据你选择的优化方法和参数对系统进行
优化,并提供优化结果。
你可以通过查看光学系统的传输矩阵、光线追迹图、像差图等来分析优化后的结果。
7.根据需要进行调整。
根据分析结果,你可以对光学系统进行调整,
包括改变元件参数、添加或删除元件等。
8.重复优化过程。
根据调整后的光学系统,你可以再次进行优化,以
进一步改善系统性能。
通过以上步骤,你可以在ZEMAX中优化非序列光学系统,以获得更好
的系统性能。
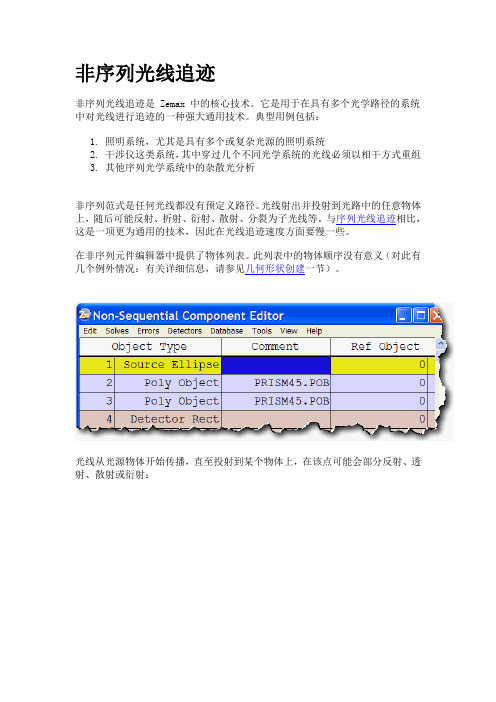
非序列光线追迹非序列光线追迹是 Zemax 中的核心技术。
它是用于在具有多个光学路径的系统中对光线进行追迹的一种强大通用技术。
典型用例包括:1.照明系统,尤其是具有多个或复杂光源的照明系统2.干涉仪这类系统,其中穿过几个不同光学系统的光线必须以相干方式重组3.其他序列光学系统中的杂散光分析非序列范式是任何光线都没有预定义路径。
光线射出并投射到光路中的任意物体上,随后可能反射、折射、衍射、散射、分裂为子光线等。
与序列光线追迹相比,这是一项更为通用的技术,因此在光线追迹速度方面要慢一些。
在非序列元件编辑器中提供了物体列表。
此列表中的物体顺序没有意义(对此有几个例外情况:有关详细信息,请参见几何形状创建一节)。
光线从光源物体开始传播,直至投射到某个物体上,在该点可能会部分反射、透射、散射或衍射:的 N-BK7 棱镜面反射,大约 50% 的能在此例中,大约 1% 的能量被涂有 MgF2量被两个棱镜相接触的直角斜边面上的膜层反射/透射。
系统会发起新光线(称为“子”光线)以带走这部分能量,从而生成能量在系统中的去向的完整视图。
物体Zemax 中的非序列光线追迹以三维物体为基础。
(注意:要求所有程序均支持非序列光线追迹是不现实的。
)在 Zemax 中,非序列物体完全由定义该物体所需的所有表面组成。
例如,标准透镜物体由正面和背面、连接两面的柱体和边缘上的斜面组成。
多数 Zemax 物体均实现了参数化,这表示这些表面通过下列等式进行了定义。
因此,创建和修改很方便,而且仅占用非常少的内存空间。
此外,还可以进行优化并确定公差。
有些 Zemax 物体未实现参数化,如 CAD 物体。
这些物体只是作为数据文件存在。
由于 Zemax 将所有物体均视为三维体,而不是表面集合,所以很容易进行光线追迹和管理大型 CAD 文件。
基于表面的代码可能需要成千上万个表面来表示复杂的 CAD 物体:在 Zemax 中,它就是一个物体。
但是,不同的表面材料和膜层可应用到一个物体的任何表面,不论使用多少 CAD 实体来予以表示。


ZEMAX概况ZEMAX是一套综合性的光学设计软件。
它集成了光学系统所有的概念、设计、优化、分析、公差分析和文档整理功能。
具有直观、功能强大、灵活、快速、容易使用等优点。
3种不同的版本:SE, XE,和EE。
ZEMAX可以模拟Sequential和non-sequential成像系统和非成像系统。
序列性(Sequential)光线追迹大多数成像系统都可以由一系列顺序排列的光学面来描述。
光线按面的顺序进行追迹。
如相机镜头、望远镜镜头、显微镜头等。
它有很多优点,如光线追迹速度快、可以直接优化和进行公差预算。
ZEMAX中的光学面可以是反射面、折射面或衍射面。
也可以建立因为光学薄膜引起的有不同透射率的光学面特性。
面之间的介质可以是各向同性的,如玻璃或空气。
也可以是任意的渐变折射率分布,折射率可以是位置、波长、温度或其它特性参数的函数。
也支持双折射材料,它的折射率是偏振态和光线角度的函数。
ZEMAX中,所有描述面的特性参数,包括形状、折射、反射、折射率、渐变折射率、热系数、透射率和衍射率都可以自定义。
非序列性(Non-sequential)光线追迹很多重要的光学系统不能用sequential光线追迹的模式描述,如复杂的棱镜、光管、照明系统、小面反射镜、非成像系统或任意形状的物件等。
而且散射和杂光也不能用序列性分析的模式。
这些系统要求用non-sequential模式,此时光线以任意的顺序打到物件上。
Non-sequential模式可以对光线传播进行更细节的分析,包括散射光或部分反射光。
进行non-sequential追迹时,ZEMAX用3D solid models光学元件,可以是任意的形状。
支持散射、衍射、渐变折射率、偏振和薄膜。
用光度学和辐射度学的单位。
Sequential 和non-sequential系统ZEMAX还可以在同一个系统中使用sequential和non-sequential光线追迹模式。
1.2光学系统有哪些特性参数和结构参数?特性参数:(1)物距L(2)物高y或视场角ω(3)物方孔径角正弦sinU或光速孔径角h(4)孔径光阑或入瞳位置(5)渐晕系数或系统中每一个的通光半径结构参数:每个曲面的面行参数(r,K,a4,a6,a8,a10)、各面顶点间距(d)、每种介质对指定波长的折射率(n)、入射光线的位置和方向1.3轴上像点有哪几种几何像差?轴向色差和球差1.4列举几种主要的轴外子午单色像差。
子午场曲、子午慧差、轴外子午球差1.5什么是波像差?什么是点列图?它们分别适用于评价何种光学系统的成像质量?波像差:实际波面和理想波面之间的光程差作为衡量该像点质量的指标。
适用单色像点的成像。
点列图:对于实际的光学系统,由于存在像差,一个物点发出的所有光线通过这个光学系统以后,其像面交点是一弥散的散斑。
适用大像差系统2.1叙述光学自动设计的数学模型。
把函数表示成自变量的幂级数,根据需要和可能,选到一定的幂次,然后通过实验或数值计算的方法,求出若干抽样点的函数值,列出足够数量的方程式,求解出幂级数的系数,这样,函数的幂级数形式即可确定。
像差自动校正过程,给出一个原始系统,线性近似,逐次渐进。
2.2适应法和阻尼最小二乘法光学自动设计方法各有什么特点,它们之间有什么区别?适应法:参加校正的像差个数m必须小于或等于自变量个数n,参加校正的像差不能相关,可以控制单个独立的几何像差,对设计者要求较高,需要掌握像差理论阻尼最小二乘法:不直接求解像差线性方程组,把各种像差残量的平方和构成一个评价函数Φ。
通过求评价函数的极小值解,使像差残量逐步减小,达到校正像差的目的。
它对参加校正的像差数m没有限制。
区别:适应法求出的解严格满足像差线性方程组的每个方程式;如果m>n或者两者像差相关,像差线性方程组就无法求解,校正就要中断。
3.1序列和非序列光线追迹各有什么特点?序列光线追迹主要用于传统的成像系统设计。
以面作为对象,光线从物平面开始,按照表面的先后顺序进行追迹,对每个面只计算一次。
非序列模式与序列模式的区别:
序列模式:
●主要应用于设计成像及远心系统
●面型在透镜数据编辑器中定义
●光线每次只可以相交于一个平面且必须依照规定的序列模式(也就是面0然后面1,面
2)由此得名序列光线追迹
●只有当面型材料是镜子时光线才能追迹。
源自折射介面的局部反射(菲涅尔反射)将被
考虑为了计算真实折射能量的广度,包括介电玻璃和金属玻璃的影响。
●每一个面都有它的局部坐标。
沿光轴上每个面的位置将参考于之前的面。
换句话说,透
镜编辑器中“厚度”栏意味着从当前面算起的距离而非从全局参考点的距离。
非序列模式
●主要用于非成像应用例如照明系统且/或杂散光分析
●面或者几何体对象被定义在非序列元件编辑器中
●机械元件可以方便从CAD程序中导入,从而完全的光机分析可以实现
●同一光线可以相交同一平面多次且可以依任意序列相交多个对象,由此得名非序列
●每个对象参考一个全局坐标,除了特定的以外
●部分反射光线会由折射介面生成并追迹,除了追迹折射光线外。
ASAP简介一、光学系统分析软件ASAPASAP™全称为Advanced System Analysis Program,即高级系统分析程序。
ASAP是由美国Breault Research Organization. Inc (BRO)公司开发的高级光学系统分析模拟软件。
经过近三十年的发展,ASAP光学软件在照明系统、汽车车灯光学系统、生物光学系统、相干光学系统、屏幕展示系统、光学成像系统、光导管系统及医学仪器设计等诸多领域都得到了行业的认可和信赖。
ASAP ™在光学设计软件界,是一个已经经过时间证实且成为工业界标准的光学设计软件。
ASAP提供给光学系统工程设计师无与匹敌的设计能力、广泛的应用性、快速的光追踪速度和准确度。
ASAP精确地预测在汽车车灯光学系统、生物光学系统、相干光学系统、屏幕展示系统、光学成像系统、光导管系统、照明系统及医学仪器设计中的全真表现。
ASAP是现有最精巧熟练的光学应用软件程序,有必须的功能可以解决最难办的光学设计和分析问题。
可模型化每一个从简单的反光镜、镜片到复杂的成像和聚光的仪器系统,并考虑了相干光学效应。
可利用灯源影像、点光源、平行光源和扇形光创造高准确的的光源模型,或是模型化完整的光源几何模型和其结合的光学特性来仿真白热灯炮、(LEDs) 、冷阴极荧光灯(CCFLs),和高强度的放电弧形灯炮。
在ASAP 的核心是非续列光线追迹引擎,此非续列光线追迹引擎以它的效率和准确度闻名整个光学软件界。
它可以将光线以任何次序或是次数投射在表面,而且光分裂会自动发生。
ASAP的每一个功能可以在一般桌上型记算机上快速的最佳化运用。
你可以在几分锺内透过简单的系统追踪数百万的光线。
可以向前、向后、连续地或是阶段性地追踪光线。
ASAP 基本上是一种具有弹性及效率之光学系统模型化的工具,它可以利用蒙地卡罗光线追迹的技术做光-机结构间的仿真,它可以不必假设系统之对称性,做单轴、全域、三维坐标的模拟。
ASAP简介一、光学系统分析软件ASAPASAP™全称为Advanced System Analysis Program,即高级系统分析程序。
ASAP是由美国Breault Research Organization. Inc (BRO)公司开发的高级光学系统分析模拟软件。
经过近三十年的发展,ASAP光学软件在照明系统、汽车车灯光学系统、生物光学系统、相干光学系统、屏幕展示系统、光学成像系统、光导管系统及医学仪器设计等诸多领域都得到了行业的认可和信赖。
ASAP ™在光学设计软件界,是一个已经经过时间证实且成为工业界标准的光学设计软件。
ASAP提供给光学系统工程设计师无与匹敌的设计能力、广泛的应用性、快速的光追踪速度和准确度。
ASAP精确地预测在汽车车灯光学系统、生物光学系统、相干光学系统、屏幕展示系统、光学成像系统、光导管系统、照明系统及医学仪器设计中的全真表现。
ASAP是现有最精巧熟练的光学应用软件程序,有必须的功能可以解决最难办的光学设计和分析问题。
可模型化每一个从简单的反光镜、镜片到复杂的成像和聚光的仪器系统,并考虑了相干光学效应。
可利用灯源影像、点光源、平行光源和扇形光创造高准确的的光源模型,或是模型化完整的光源几何模型和其结合的光学特性来仿真白热灯炮、(LEDs) 、冷阴极荧光灯(CCFLs),和高强度的放电弧形灯炮。
在ASAP 的核心是非续列光线追迹引擎,此非续列光线追迹引擎以它的效率和准确度闻名整个光学软件界。
它可以将光线以任何次序或是次数投射在表面,而且光分裂会自动发生。
ASAP的每一个功能可以在一般桌上型记算机上快速的最佳化运用。
你可以在几分锺内透过简单的系统追踪数百万的光线。
可以向前、向后、连续地或是阶段性地追踪光线。
ASAP 基本上是一种具有弹性及效率之光学系统模型化的工具,它可以利用蒙地卡罗光线追迹的技术做光-机结构间的仿真,它可以不必假设系统之对称性,做单轴、全域、三维坐标的模拟。