第六章_轴线问题案例
- 格式:ppt
- 大小:5.15 MB
- 文档页数:32

第六章圆轴扭转练习带答案第六章圆轴的扭转⼀、填空题1、圆轴扭转时的受⼒特点是:⼀对外⼒偶的作⽤⾯均_______于轴的轴线,其转向______。
2、圆轴扭转变形的特点是:轴的横截⾯积绕其轴线发⽣________。
3、在受扭转圆轴的横截⾯上,其扭矩的⼤⼩等于该截⾯⼀侧(左侧或右侧)轴段上所有外⼒偶矩的_______。
4、圆轴扭转时,横截⾯上任意点的切应⼒与该点到圆⼼的距离成___________。
5、试观察圆轴的扭转变形,位于同⼀截⾯上不同点的变形⼤⼩与到圆轴轴线的距离有关,显然截⾯边缘上各点的变形为最_______,⽽圆⼼的变形为__________。
6、圆轴扭转时,在横截⾯上距圆⼼等距离的各点其切应⼒必然_________。
7、从观察受扭转圆轴横截⾯的⼤⼩、形状及相互之间的轴向间距不改变这⼀现象,可以看出轴的横截⾯上⽆____________⼒。
8、圆轴扭转时,横截⾯上切应⼒的⼤⼩沿半径呈______规律分布。
10、圆轴扭转时,横截⾯上内⼒系合成的结果是⼒偶,⼒偶作⽤于⾯垂直于轴线,相应的横截⾯上各点的切应⼒应垂直于_________。
11、受扭圆轴横截⾯内同⼀圆周上各点的切应⼒⼤⼩是_______的。
12、产⽣扭转变形的⼀实⼼轴和空⼼轴的材料相同,当⼆者的扭转强度⼀样时,它们的_________截⾯系数应相等。
13、横截⾯⾯积相等的实⼼轴和空⼼轴相⽐,虽材料相同,但_________轴的抗扭承载能⼒要强些。
16、直径和长度均相等的两根轴,其横截⾯扭矩也相等,⽽材料不同,因此它们的最⼤剪应⼒是________同的,扭转⾓是_______同的。
17、产⽣扭转变形的实⼼圆轴,若使直径增⼤⼀倍,⽽其他条件不改变,则扭转⾓将变为原来的_________。
18、两材料、重量及长度均相同的实⼼轴和空⼼轴,从利于提⾼抗扭刚度的⾓度考虑,以采⽤_________轴更为合理些。
⼆、判断题1、只要在杆件的两端作⽤两个⼤⼩相等、⽅向相反的外⼒偶,杆件就会发⽣扭转变形。
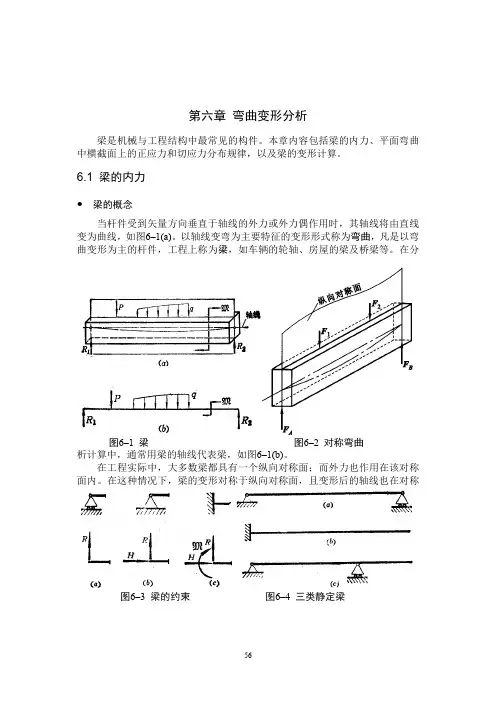
第六章 弯曲变形分析梁是机械与工程结构中最常见的构件。
本章内容包括梁的内力、平面弯曲中横截面上的正应力和切应力分布规律,以及梁的变形计算。
6.1 梁的内力● 梁的概念当杆件受到矢量方向垂直于轴线的外力或外力偶作用时,其轴线将由直线变为曲线,如图6–1(a)。
以轴线变弯为主要特征的变形形式称为弯曲,凡是以弯曲变形为主的杆件,工程上称为梁,如车辆的轮轴、房屋的梁及桥梁等。
在分析计算中,通常用梁的轴线代表梁,如图6–1(b)。
在工程实际中,大多数梁都具有一个纵向对称面;而外力也作用在该对称面内。
在这种情况下,梁的变形对称于纵向对称面,且变形后的轴线也在对称图6–1 梁 图6–2 对称弯曲图6–3 梁的约束 图6–4 三类静定梁面内,即所谓的对称弯曲,如图6–2。
它是弯曲问题中最基本、最常见的情况。
本章只讨论梁的对称弯曲。
图6–3表示了梁的三种常见约束形式及相应的约束力:可动铰支座(图6–3(a)),固定铰支座(图6–3(b))和(平面)固定端约束(图6–3(c))。
在以上三种约束方式下,有三种常见的梁形式,如图6–4所示。
图6–4(a)为简支梁,两端分别为固定铰支座和活动铰支座;图6–4(b)为悬臂梁,一端固定端约束,一端自由;图6–4(b)为外伸梁,它是具有一个或两个外伸部分的简支梁。
这三种梁都是静定梁。
作用在梁上的外载荷,常见的有集中力偶M (图6–5(a))、分布载荷q (图6–5(b))和集中力F (图6–5(c))。
在实际问题中,q 为常数的均布载荷较为常见。
● 梁的剪力与弯矩在4.2中已经介绍了求杆件内力的通用方法,即截面法。
具体到梁,其内力分量为剪力和弯矩,规定当剪力相对于横截面的转向为顺时针为正,使杆件发生上凹下凸的弯矩为正,如图4–5(b)和(c)。
例6–1:如图6–6所示悬臂梁,受均布载荷q ,在B 点处受矩为2qa M =的力偶作用,试绘梁的剪力图与弯矩图。
解:设固定端的约束力和约束力偶为C R 和C M ,则由平衡方程00=-=∑qa R F C y ,qa R C =05.102=--⋅=∑C C M qa qa a m ,221qa M C = 以杆件左端为坐标原点,以B 为分界面,将梁分为AB 和BC 两段。
《摄像基础》单元教学设计——《轴线及轴线规则》单元设计【教学目标】Ⅰ. 能力(技能)目标1.会利用轴线进行机位布置2.会确定不同类型的轴线3.能够做到“平、稳、实”进行固定画面拍摄4.利用轴线规则,分别拍摄三种不同类型的轴线视频短片II.知识目标1.掌握三种类型轴线2.掌握三种类型轴线的造型特点3.掌握轴线规则4.掌握越轴的概念与如何越轴III.情感目标1.培养对细节的观察能力2.理解轴线在摄像中的重要作用3.提高镜头的审美能力与艺术创造能力【教学设计】Ⅰ. 告知教学内容与目的(5m approx.)本环节告诉学生本节教学的内容是以以前的实践为基础,有了镜头,但是镜头的拍摄不是盲目的,有一定的规则需要遵循。
以例子来引出来次实践内容。
实例:请两个同学演示一个新闻采访的场景。
提出问题,如何安排机位?根据回答情况引出本次实践内容——轴线。
所谓轴线,是指在对摄像机场面调度的过程中与被摄对象的视线方向、运动方向和不同对象之间的关系所形成的一条无形的动作线。
是指一条假想的“线”、虚拟的“线”。
本节课程主要完成三种不同类型轴线的系列视频短片,学生按照老师要求的进行拍摄。
本次课以小组为单位进行拍摄,每个组完成所一部自己创作的视频短片。
II. 探索与发现(20m approx.)让学生自己探索摄像机的机位布置基础之上,本次课进行提问:1.摄像机的机位由哪些因素决定?选择摄像机位(拍摄三坐标)拍摄距离:拍摄高度:平拍、俯拍、仰拍拍摄方位:正拍、斜侧拍、正侧拍、背拍摄像机位——摄影机拍摄时的观察点/视点。
(Point of view, POV)即:构图时运用摄影机取景器观察、选择而确定的画面的拍摄位置。
由:拍摄距离拍摄方向决定拍摄高度(画面造型三要素)2.有哪些拍摄方向(位)?正面方向、侧面方向、斜侧方向、背面方向3.有哪些拍摄角度?平视、俯视、仰视4.机位的布置是否有一定的规则?根据被摄对象的视线方向、运动方向和不同对象之间的关系确定。

图形与坐标(知识梳理)知识点:1.x轴上的点可以表示为(x,0); y轴上的点可以表示为(0,y);2.各象限内点的特征如下坐标和表:3.距离:若点P(x,y),则P到x轴的距离为 |y| ,到y轴的距离为 |x| .例题1.点P(m+3,m+1)在y轴上,则点P的坐标为( )A.(0,-2)B.(2,0)C.(4,0)D.(0,-4)例题2.若点P(1-a,a+2)在第二象限,则a的取值范围是( )A.a>-2B.﹣2<a<1C.a<﹣2D.a>1例题3.已知平面直角坐标系内一点P(﹣5,﹣3),则P到x轴的距离为,到y轴的距离为。
例题4.已知点P到x轴的距离是6,到y轴的距离是5,求P的坐标.注意:距离是用 |x| 和 |y| 来表示的,所以应有多种情况.例题5.如果yx<0,则点P(x,y)在( )A.第一象限B.第二象限C.第三象限D.第四象限例题6.已知点A(2a+b,a+3b)到y轴的距离和原点的距离都为5,请求点B(a﹣b2,b﹣a2)到x 轴的距离(注意:先画草稿图探索,在动手做题)第一象限第二象限第三象限第四象限+ ,+ -,+ -,-+ ,-例题7.对于任意一点P(x , x 2﹣2x)一定不在( )A.第一象限B.第二象限C.第三象限D.第四象限解:练习:1.点M(a+3,a ﹣4)在x 轴上,则点M 的坐标为 。
2.点P 在x 轴上,且到y 轴的距离为5,则P 点的坐标是 。
3.如果点P(m,1﹣2m)在第四象限,那么m 的取值范围为( )A.0<m <21B.﹣21<m <0C.m <<0D.m >21 4.点P(2,﹣5)到x 轴的距离为 ;到y 轴的距离为 。
5.点Q(k,h)到x 轴的距离和到y 轴的距离相等,且到原点的距离为4,则Q 点的坐标为 。
6.若P(x,y)的坐标满足xy=0,则点P 的位置在( )A.原点B.x 轴上C.y 轴上D.坐标轴上知识点:平行类,平移类1.平行于x 轴的线段上任意一点均可表示为 (x,A),(x 是变量,由两个端点横坐标来决定x 的变化范围,A 为常数)2.平行于y 轴的线段上任意一点均可表示为 (B,y),(B 为常数,y 是变量,由两个端点纵坐标来决定y 的变化范围)3.点平移的变化规律:4.线段的平移就是把端点平移就可.例题1.在平面直角坐标系中,把以A(1,﹣2),B(﹣3,﹣2)为端点的线段向右平移6个单位,所得图像A1B1,上任意一点的坐标可以表示为。
第六章 例题精选及答题技巧例5-1 某传动装置如例5-1图所示,已知:1z =60,2z =48,'2z =80,3z =120,'3z =60,4z =40,蜗杆'4z =2(右旋),涡轮5z =80,齿轮'5z =65,模数m=5 mm 。
主动轮1的转速为1n =240 r/min ,转向如图所示。
试求齿条6的移动速度6v 的大小和方向。
例5-1图解题要点:这是一个由圆柱齿轮、圆锥齿轮、蜗轮蜗杆、齿轮齿条所组成的定轴轮系。
解:为了求齿条6的移动速度6v 的大小,需要首先求出齿轮5'的转动角速度'5ω。
因此首先计算传动比15i 的大小: 322608060804012048432154325115=⨯⨯⨯⨯⨯⨯==='''z z z z z z z z n n i ===='3224015155i n n n 7.5 r/min 605.7260255⨯==''ππωn =0.785 rad/s 齿条6的移动速度等于齿轮5'的分度圆线速度,即:785.0655212155556⨯⨯⨯===''''ωωmz r v =127.6 mm/s 齿条6的运动方向采用画箭头的方法确定如例5-1图所示。
例5-2 如例5-2图所示,已知各轮齿数为1z 、2z 、3z 、4z 、5z 、6z ,1z 为主动件,转向如图箭头所示,试求:1. 传动比?/11==H H i ωω(列出表达式);2. 若已知各轮齿数1z =2z =4z =5z =20,3z =40,6z =60,求H i 1的大小及转向。
图 5-2解题要点:如例5-2图所示,从结构上看,此轮系由两部分组成,齿轮1、齿轮2、齿轮3组成定轴轮系,齿轮4、5、6及系杆H 组成行星轮系,二者之间属串联关系。
齿轮3和齿轮4属同一构件。
平面直角坐标系知识点总结归纳及配套练习1.平面直角坐标系的意义:在平面内有公共原点且互相垂直的两条数轴组成平面直角坐标系。
水平的数轴为X轴,铅直的数轴为y轴,它们的公共原点O为直角坐标系的原点。
2.象限: 两坐标轴把平面分成________,坐标轴上的点不属于 ____________。
3.可用有序数对(a ,b)表示平面内任一点P的坐标。
a表示横坐标,b表示纵坐标。
4.各象限内点的坐标符号特点: 第一象限______,第二象限_____ 第三象限______,第四象限_______。
5.坐标轴上点的坐标特点: 横轴上的点纵坐标为___,纵轴上的点横坐标为____。
6.利用平面直角坐标系绘制某一区域的各点分布情况的平面图包括以下过程:(1)建立适当的坐标系,即选择适当点作为原点,确定x轴、y轴的正方向; (注重寻找最佳位置)(2)根据具体问题确定恰当的比例尺,在数轴上标出单位长度;(3)在坐标平面上画出各点,写出坐标名称。
7.一个图形在平面直角坐标系中进行平移,其坐标就要发生相应的变化, 可以简单地理解为: 左、右平移___坐标不变, ___坐标变,变化规律是___减___加, 上下平移___坐标不变, ___坐标变, 变化规律是___减 ___加。
例如:当P(x ,y)向右平移a个单位长度,再向上平移b个单位长度后坐标为p′(x+a ,y+b)。
8.特殊点的坐标:平行于x轴的直线上的点的坐标特点是平行于y轴的直线上的点的坐标特点是9.在平面直角坐标系中,点p ( a , b )关于x轴的对称点的坐标为_______,关于y轴的对称点的坐标为_______,关于原点的对称点的坐标为_______。
10.点p ( a , b )到x轴的距离为_______,到y轴的距离为_______。
二、练习题1.下列各点分别在坐标平面的什么位置上?A(3,2)、B(0,-2)、C(-3,-2)、 D(-3,0)、 E(-1.5,3.5)、F (2,-3)2. 已知点A(m,-2),点B(3,m-1),且直线AB∥x轴,则m的值为_______。