大学物理教案--机械振动与机械波
- 格式:doc
- 大小:938.00 KB
- 文档页数:13
物理教案:机械振动与波动一、引言在物理学中,机械振动与波动是两个核心概念。
机械振动描述了物体围绕平衡位置作周期性的来回运动,而波动则涉及物质传递能量的起伏波动。
本教案将重点介绍机械振动和波动的基本原理、特征以及相关实例,帮助学生深入理解这两个重要的物理现象。
二、机械振动1. 弹簧振子弹簧振子是机械振动的一个典型实例。
学生可以通过实验观察和分析弹簧振动的特点。
首先,我们带领学生了解弹簧的特性,包括弹簧系数和其与质量的关系。
其次,通过改变振幅、频率等参数,观察弹簧振子的变化规律。
最后,引导学生从能量守恒的角度分析振子的振动特性,以及弹簧振子的应用场景。
2. 转子振动转子振动是另一个常见的机械振动现象。
通过介绍转子振动的原理和特征,学生能够掌握转子振动的基本知识。
我们可以为学生提供转子振动实验装置,让他们亲自动手进行实验。
通过测量转子的转速、振幅等参数,学生能够深入了解振动的特征和相关原理。
同时,我们还可以引导学生进行振幅、频率与转速之间的关系的探究,帮助他们进一步理解转子振动的规律。
三、波动1. 机械波的传播机械波指的是通过物质颗粒间的振动传递能量的波动。
通过实验和观察,我们可以向学生展示机械波的传播特征。
我们可以通过示波器等仪器,观察并记录波峰、波谷、波长、振幅等参数。
同时,我们还可以进行演示,展示波的传播过程中的反射、折射和干涉现象等,用以加深学生对机械波传播的理解。
2. 声波的特性声波是一种机械波的特例,是一种能够在空气或其他介质中传播的波动。
我们可以通过实验和观察,让学生了解声波的特性。
例如,我们可以向学生展示共振现象,以及声音的传播速度与介质密度之间的关系。
通过这些实验,学生能够更直观地了解声波的传播规律和特征。
四、应用实例1. 用机械振动探测地震地震是一种自然界中的机械振动现象。
我们可以向学生介绍地震传感器的原理和使用。
通过引导学生观察和分析地震传感器的工作方式,学生能够了解地震波的传播和地震测定的基本原理。
机械振动和机械波第一部分机械振动1机械振动定义物体在跟偏离平衡位置的位移大小成正比,并且总指向平衡位置的回复力的作用下的振动,叫简谐运动。
表达式为:F=-kx,是判断一个振动是不是简谐运动的充分必要条件。
注(1)简谐运动的位移必须是指偏离平衡位置的位移。
也就是说,在研究简谐运动时所说的位移的起点都必须在平衡位置处。
(2)回复力是一种效果力,是振动物体在沿振动方向上所受的合力。
(3)“平衡位置”不等于“平衡状态”。
平衡位置是指回复力为零的位置,物体在该位置所受的合外力不一定为零。
(如单摆摆到最低点时,沿振动方向的合力为零,但在指向悬点方向上的合力却不等于零,所以并不处于平衡状态。
)(4)做简谐运动的物体在某一时刻(或某一位置)的位移x、回复力F、加速度a、速度v这四个矢量的相互关系。
(1)F x,方向与位移方向相反。
(2)a F,方向与F方向相同。
(3)a x,方向与位移方向相反。
(4):当v、a同向时v一定增大;当v、a反向时,v一定减小。
2.表达式,其中A是振幅,是t=0时的相位,即初相位或初相。
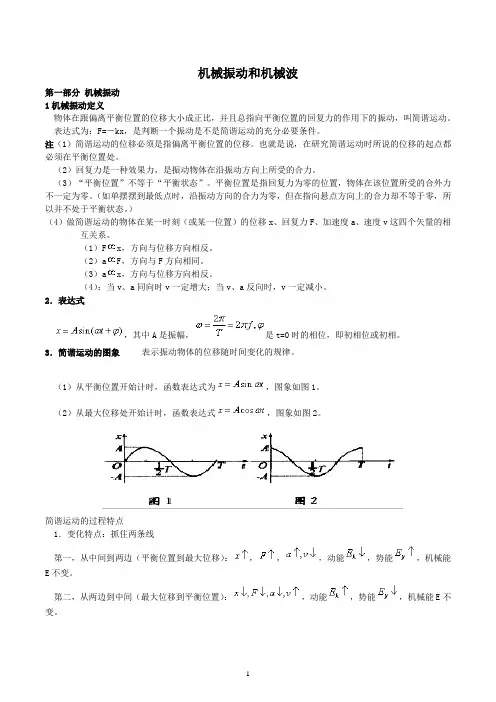
3.简谐运动的图象表示振动物体的位移随时间变化的规律。
(1)从平衡位置开始计时,函数表达式为,图象如图1。
(2)从最大位移处开始计时,函数表达式,图象如图2。
简谐运动的过程特点1.变化特点:抓住两条线第一,从中间到两边(平衡位置到最大位移):,,,动能,势能,机械能E不变。
第二,从两边到中间(最大位移到平衡位置):,动能,势能,机械能E不变。
.从图象中可以知道(1)任一个时刻质点的位移(2)振幅A (3)周期T (4)速度方向(5)加速度:注:(1)简谐运动的图象不是振动质点的轨迹。
(2)简谐运动的周期性体现在振动图象上是曲线的重复性。
简谐运动的图象任一时刻图线上过该点切线的斜率数值代表该时刻振子的速度大小,正负表示速度的方向,斜率为正时表示速度沿x正向,斜率为负时表示速度沿x负向。
1:一质点做简谐振动,其位移x与时间t的关系曲线如图所示,由可知() A.质点振动频率是4Hz B.t=2s时,质点的加速度最大C.质点的振幅为2cm D.t=3s时,质点所受合外力最大答案:BC2、一质点简谐运动的振动图象如图所示。
![2024版公开课西安交通大学大学物理机械振动、波和波动[1]](https://uimg.taocdn.com/368fbde8294ac850ad02de80d4d8d15abe2300c3.webp)
教学目标:1. 知识与技能:- 理解机械波的定义、形成条件、传播特点。
- 掌握机械波的分类、波速、波长、频率等基本概念。
- 理解机械波的干涉、衍射现象,并能解释实际生活中的相关现象。
2. 过程与方法:- 通过实验和演示,培养学生的观察能力和实验操作技能。
- 通过小组讨论和合作,提高学生的分析和解决问题的能力。
3. 情感、态度与价值观:- 培养学生对物理现象的好奇心和求知欲。
- 增强学生的科学素养,树立科学的世界观。
教学重点:1. 机械波的定义、形成条件、传播特点。
2. 机械波的分类、波速、波长、频率等基本概念。
3. 机械波的干涉、衍射现象。
教学难点:1. 机械波的形成和传播原理。
2. 干涉和衍射现象的理解和应用。
教学准备:1. 实验器材:机械波演示器、波源、示波器、光栅、单缝、双缝等。
2. 多媒体课件。
教学过程:一、导入新课1. 展示生活中常见的机械波现象,如水波、声波等,引导学生思考机械波的形成和传播特点。
2. 提问:什么是机械波?机械波有哪些特点?二、讲授新课1. 机械波的定义、形成条件、传播特点:- 机械波是指振动在介质中传播的波。
- 形成条件:机械振动和介质。
- 传播特点:沿介质传播,具有波动性、传播性、反射性、折射性等。
2. 机械波的分类、波速、波长、频率等基本概念:- 机械波可分为横波和纵波。
- 波速:波在单位时间内传播的距离。
- 波长:相邻两个波峰(或波谷)之间的距离。
- 频率:单位时间内波通过某一点的次数。
3. 机械波的干涉、衍射现象:- 干涉:两列或多列相干波相遇时,产生的加强或减弱现象。
- 衍射:波在传播过程中遇到障碍物或孔径时,发生偏离直线路径传播的现象。
三、实验演示1. 机械波演示器演示机械波的传播过程。
2. 通过示波器观察波源产生的机械波。
3. 光栅、单缝、双缝等实验演示干涉和衍射现象。
四、课堂小结1. 回顾本节课所学内容,强调重点和难点。
2. 提问:如何应用机械波的知识解释实际生活中的现象?五、作业布置1. 完成课后习题,巩固所学知识。
教学过程一、复习预习我们接触到一种广泛存在的运动形式——波动,请同学们再举出几个有关波的例子,水波、声波、地震波等等。
水波、声波、地震波都是机械波,无线电波、光波都是电磁波。
这一章我们学习机械波的知识,以后还会学习电磁波的知识。
二、知识讲解课程引入:我们之前学过的直线运用、圆周运动一样,都是我们自然界广泛存在的运动形式。
我们把水波、绳波、声波这些波动都叫做机械波,这一章我们就来学习机械波的知识。
首先一起来学习机械波的第一节内容:波的形成和传播。
绳波的演示:将绳子的一端固定,用手握住绳子的另一端抖动绳子,产生一列凹凸相间的波在绳子上传播。
用手抖动绳子为绳子动起来提供动力和能量,所以从刚才的现象中我们可以知道:要形成人浪的波动,就要让一名同学先运动,他就是波形成的一个必备条件,同理手也是绳波形成的条件,我们把这个条件叫做波源。
产生机械波的条件: 波源空气作为一种有弹性的物质,可以传递来自声源的作用力,将振动最终传播到耳中,使我们听到声音。
我们把像空气这种能够传递相互作用的物质叫做介质。
因此波形成的另一个必备条件是:介质只要具备了波产生的两个条件:波源与介质,波就可以产生了。
波源的振动带动和它相连的介质的振动。
而由于介质能发生相互作用,使得与这部分相连的部分也开始振动,依次传递便形成了波。
1、从振动的先后角度来看,沿波的传播方向,介质中各质点由波源开始由近及远依次开始振动;2、对于介质中的各质点只在平衡位置附近做机械振动,并不随波迁移。
这说明波传播的不是介质中的各质点,那传播的究竟是什么呢?我们看到的只是前一个质点的振动会依次传递给后面的质点,所以波传播的是波源的振动形式。
3、由于振动是有能量的,所以传播的也是能量。
考点/易错点3、机械波的分类波的方向与振动方向相互垂直;弹簧波传播的方向与振动方向相互平行,我们把像绳波这样,波传播的方向与振动方向相互垂直的波,叫做横波;把像弹簧波这样,波传播的方向与振动方向相互平行的波,叫做纵波。
资料范本本资料为word版本,可以直接编辑和打印,感谢您的下载高考第一轮复习教案08-机械振动机械波地点:__________________时间:__________________说明:本资料适用于约定双方经过谈判,协商而共同承认,共同遵守的责任与义务,仅供参考,文档可直接下载或修改,不需要的部分可直接删除,使用时请详细阅读内容翰林汇翰林汇翰林汇翰林汇课题:机械振动机械波类型:复习课第1课简谐振动、振动图像一、教学目标:(一)知识与技能1.了解什么是机械振动2.掌握简谐运动回复力的特征3.掌握在一次全振动过程中回复力、加速度、速度随偏离平衡位置的位移变化的规律(定性)4.理解振动图像的物理意义,能利用图像求振动物体的振幅、周期及任意时刻的位移;会将振动图像与振动物体在某时刻位移与位置对应,并学会在图象上分析与位移x有关的物理量。
(二)过程与方法通过观察演示实验,概括出机械振动的特征,培养学生的观察、概括能力;通过相关物理量变化规律的学习,培养分析、推理能力。
(三)情感态度价值观运用理想化方法,突出主要因素,忽略次要因素,抽象出物理模型——弹簧振子,研究弹簧振子在理想条件下的振动。
二、教具:激光笔,平面镜,PPT,展台气垫弹簧振子知识简析一、机械振动1、机械振动:物体(或物体的一部分)在某一中心位置两侧做的往复运动.振动的特点:①存在某一中心位置;②往复运动,这是判断物体运动是否是机械振动的条件.产生振动的条件:①振动物体受到回复力作用;②阻尼足够小;2、回复力:振动物体所受到的总是指向平衡位置的合外力.①回复力时刻指向平衡位置;②回复力是按效果命名的, 可由任意性质的力提供.可以是几个力的合力也可以是一个力的分力; ③合外力:指振动方向上的合外力,而不一定是物体受到的合外力.④在平衡位置处:回复力为零,而物体所受合外力不一定为零.如单摆运动,当小球在最低点处,回复力为零,而物体所受的合外力不为零.3、平衡位置:是振动物体受回复力等于零的位置;也是振动停止后,振动物体所在位置;平衡位置通常在振动轨迹的中点。
机械波教案示例(之一)一、教学目标1.在物理知识方面的要求:(l)明确机械波的产生条件;(2)掌握机械波的形成过程及波动传播过程的特征;(3)了解机械波的种类极其传播特征;(4)掌握描述机械波的物理量(包括波长、频率、波速)。
2.要重视观察演示实验,对波的产生条件及形成过程有全面的理解,同时要求学生仔细分析课本的插图。
3.在教学过程中教与学双方要重视引导和自觉培养正确的思想方法。
二、重点、难点分析1.重点是机械波的形成过程及描述;2.难点是机械波的形成过程及描述。
三、教具1.演示绳波的形成的长绳;2.横波、纵波演示仪;3.描述波的形成过程的挂图。
四、主要教学过程(一)引入新课我们学习过的机械振动是描述单个质点的运动形式,这一节课我们来学习由大量质点构成的弹性介质的整体的一种运动形式——机械波。
(二)教学过程设计1.机械波的产生条件例子——水波:向平静的水面投一小石子或用小树枝不断地点水,会看到水面上一圈圈起伏不平的波纹逐渐向四周传播出去,形成水波。
演示——绳波:用手握住绳子的一端上下抖动,就会看到凸凹相间的波向绳的另一端传播出去,形成绳波。
以上两种波都可以叫做机械波。
(l)机械波的概念:机械振动在介质中的传播就形成机械波(2)机械波的产生条件:振源和介质。
振源——产生机械振动的物质,如在绳波中绳子端点在手的作用下不停抖动就是振源。
介质——传播振动的介质,如绳子、水。
2.机械波的形成过程(1)介质模型:把介质看成由无数个质点弹性连接而成,可以想象为(图1所示)(2)机械波的形成过程:由于相邻质点的弹力的作用,当介质中某一质点发生振动时,就会带动周围的质点振动起来,从而使振动向远处传播。
例如:图2表示绳上一列波的形成过程。
图中1到18各小点代表绳上的一排质点,质点间有弹力联系着。
图中的第一行表示在开始时刻(t=0)各质点的位置,这时所有质点都处在平衡位置。
其中第一个质点受到外力作用将开始在垂直方向上做简谐运动,设振动周期为T,则第二行表示经过T/4时各质点的位置,这时质点1已达到最大位移,正开始向下运动;质点2的振动较质点1落后一些,仍向上运动;质点3更落后一些,此时振动刚传到了质点4。
物理教案:机械振动与波动机械振动与波动引言机械振动与波动是物理学中一个重要的研究领域,涉及到许多实际应用和现象的解释。
本教案将介绍机械振动与波动的基本原理和相关概念,并结合实例进行详细解析,以帮助学生更好地理解和掌握这一内容。
一、机械振动1. 振动的基本概念- 振动是物体围绕平衡位置做往复运动的现象。
- 振幅、周期、频率是描述振动性质的重要参数。
2. 单摆- 单摆是一个简单的振动系统,由质点和可以绕着固定点旋转的轻绳组成。
- 单摆的周期公式为T = 2π√(L/g),其中L为摆长,g为重力加速度。
3. 弹簧振子- 弹簧振子是由弹簧和质点组成的系统,在弹力作用下产生往复运动。
- 弹簧振子的周期公式为T = 2π√(m/k),其中m为质点质量,k为弹簧刚度系数。
4. 阻尼振动- 阻尼振动是在摩擦或其他耗散力作用下进行的振动。
- 阻尼振动可以分为欠阻尼、过阻尼和临界阻尼三种情况。
二、机械波动1. 波动的基本概念- 波是物质或能量在空间中传播的方式。
- 机械波需要介质传递,而电磁波则不依赖介质。
2. 机械波的类型- 横波:介质颗粒振动方向垂直于波的传播方向。
- 纵波:介质颗粒沿着波的传播方向振动。
3. 波长、频率和速度- 波长是相邻两个振动最大值之间的距离,用λ表示。
- 频率是单位时间内通过某一点的波峰或波谷个数,用f表示。
- 速度等于波长乘以频率,即v = λf。
4. 声音的传播- 声音是一种机械纵波单色波单色暴发夹层单色夹层单色籍绝经籍儿童噪声卡片亮片暗绿色振动,需要通过介质传递。
- 声音传播的速度与介质的性质有关,一般在固体中传播最快,气体中传播最慢。
三、实例分析1. 手摇弹簧振子- 实验装置:一个手摇装置和一个悬挂弹簧振子。
- 操作步骤:通过手摇装置给弹簧带来一个初速度,观察振子的运动。
- 结果分析:初速度越大,周期越小;弹簧刚度越大,周期越小;重力加速度越大,周期越小。
2. 压电效应- 实验装置:一个压电晶体和一个接收器。
教学目标 1.掌握简谐振动的定义、表达方式、简谐振动的合成方法;了解自由、阻尼、强迫等各类简谐振动的特点和规律。
2.掌握振动和波的关系、波的相干条件、叠加原理、驻波的形成条件、驻波的振幅、相位和能量的空间分布,半波损失。
3.学会建立波动方程。
教学难点 多自由体系的小振动第十一章 机械振动振动是指物体或系统在其平衡位置附近的往复运动。
(例子:物体位置、电流强度、电压、电场强度、磁场强度等)。
物体或系统质点数是无穷的,自由度数也是无穷的,因此存在空间分布和时间分布,需要用偏微分方程描述 (如果一个微分方程中出现多元函数的偏导数,或未知函数与几个变量有关,而且未知函数对应几个变量的导数,那么这种微分方程就是偏微分方程。
例如弦包含很多的质点,不能用质点力学的定律研究,但是可以将其细分成若干个极小的小段,每小段可以抽象成一个质点,用微分的方法研究质点的位移,其是这点所在的位置和时间变量的函数,根据张力,就可以建立起弦振动的偏微分方程) 。
一、简谐振动(单自由度体系无阻尼自由小振动)虽然多质点的振动要用偏微分方程描述,但是我们可以简化或只考虑细分成的每一小段,那么就成为单质点单自由度(只需一个坐标变量)的振动。
222222222,,0cos():0i i t F k kF kx a x m m m d x d x a x a x dt dtx A t Ae e i ,令特征方程特征根:ϕωωωωωϕλωλω=-==-==-=∴+==+=+==±A (振幅)、ϕ(初相位)都是积分常数,k 为倔强系数。
在微分方程中所出现的未知函数的导数的最高阶数称为这个方程的阶。
形如()()dx P t x Q x dt +=的方程为线性方程,其特点是它关于未知函数x 及其导数dxdt都是一次的。
若()0Q x =,则()0dxP t x dt+=称为齐次的线性方程。
二阶常系数齐次线性微分方程的解法:()()12121212121,212cos sin t ttt x c e c e x c c t e i x e c t c t λλλαλλλλλαβββ≠=+==+=±=+由cos()sin()x A t v A t ωϕωωϕ=+⇒=-+按周期定义,()()cos()cos sin()sin A t A t T A t A t T ωϕωϕωωϕωωϕ+=++⎡⎤⎣⎦-+=-++⎡⎤⎣⎦,同时满足以上两方程的T 的最小值应为2p w ,所以2T p w=,于是1,2T n w pn ==,w 称为圆频率或角频率。
不像A 、ϕ,由初始条件决定,w 由固有参量k 和m 决定,与初始条件无关,故称为振子的固有频率。
简谐振动的状态的物理量位置和速度随时间变化,但只要()t ωϕ+相同,振动的状态就相同,所以()t ωϕ+是决定振动状态的物理量,称为位相。
w 是位相的变化速率,单位是弧度/秒。
由于复数平面上任一点对应一个矢量,还可以用一个旋转矢量来描述简谐振动。
在相空间中,简谐振动由一条椭圆曲线所描述:位移和动量 cos(),sin()x A t p mv m A t ωϕωωϕ=+==-+满足椭圆方程 22221()x p A mA ω+= 举例:单摆的摆动弹簧振子和单摆都是在弹性力或准弹性力作用下作简谐振动的保守系统,称为谐振子。
由于弹性力是保守力,简谐振动中机械能是守恒的,于是22222222211cos (),sin()221sin (),2212p k p k E kx kA t p m A t p k E m A t m mE E E kA ωϕωωϕωωϕω==+=-+==+==+=振动的合成与分解①同方向、同频率的两简谐振动的合成(矢量法)312123123i i i i tx x x x Ae A e A e e ϕϕϕω⎡⎤=++=++⎣⎦I.212,0,1,2,k k jjp -==北L 则12A A A =+,即当两分振动的相位差为p 的偶数倍时,合振动的振幅为两分振动振幅之和。
II.()2121,0,1,2,k k jjp -=+=北L 则12A A A =-,即当两分振动的相位差为p 的奇数倍时,合振动的振幅为两分振动振幅之差。
III.21jj -为一般值,则1212A A A A A -<<+。
②同方向、不同频率的两简谐振动的合成(三角函数法)—参见拍③振动方向垂直的两谐振动的合成(三角法、计算机法)()()212121121212212112222222211221221212211cos cos cos cos sin sin cos cos cos cos cos sin sin cos cos cos sin sin cos cos 2cos cos sin sin sin cos cos si xt t A y t t A x y t A A x y xyt A A A A x t A j w j j w j j j w j j w j j j j w j j j j j j w jjj w j ü=-ïïÞýï=-ïïþ-=-?+-=-=()()()212121************2222112212212122222121221212n sin sin sin sin cos cos sin sin sin sin sin sin cos sin cos cos 2sin sin cos sin 2cos()sin t y t t A x y t A A x y xyt A A A A x y xy A A A A j w j j j w j j w j j j j w j j j j j j w jjj j jjü-ïïÞýï=-ïïþ-=-?+-=-\+--=-若频率比为简单整数比,则合成曲线是稳定的封闭的,运动也具有周期性,其轨迹称为李萨如图形。
I.若210jj-=,则21A y x A =II. 若 2211,A y x A jj p -==-III. 若22212212,12x y y A A p j j -==+=IV. 若222122123,12x y y A A p j j -==+=-二、单自由度体系的小振动单自由度指只需要一个坐标就可以确定系统的位置。
1. 自由振动势能()V q 在平衡位置0q q =附近展开得2200021()()()()2q q dV d V V q V q q q q q dq dq ⎛⎫⎛⎫=+-+-+ ⎪ ⎪⎝⎭⎝⎭L1122112212cos(),cos()cos cos sin sin ,cos cos sin sin x A t y A t x yt t t t A A w j w j w j w j w j w j =+=+=-=-第一项为常数,可取为势能的零点。
因在稳定平衡位置势能取驻值(导数为0的点称为函数的驻点,在驻点取得的函数值为驻值,而极值点0x 是指函数在邻域()00,x x δδ-+)内,()0f x 是函数的最大值或最小值),第2项中的一阶导数为零。
记2212qd V k dq ⎛⎫= ⎪⎝⎭0x q q =-得 212V kx = 考虑到对稳定约束0t ∂=∂r,根据i i i q q t ααα∂∂=+∂∂∑&&r r r ,可得动能 2222011221211(),()22i i i i i i i i i i i i i i i T m q m q q m q q t q q q t m t T a q q mx m a q ααβαααβαααβα⎛⎫⎛⎫⎛⎫∂∂∂∂∂∂=+=⋅+⋅ ⎪ ⎪ ⎪ ⎪∂∂∂∂∂∂⎝⎭⎝⎭⎝⎭∂⎛⎫+ ⎪∂⎝⎭=≈=∑∑∑∑∑∑∑&&&&&&其中r r r r r r r 于是拉氏函数221122L T V mx kx =-=-&。
代入拉氏方程得 200mx kx x x ω+=+=&&&&或其中ω=()cos x A t ωφ=+。
A 为振幅,φ为初相位。
附注:拉格朗日方程,,22222222211111(1,2,,)111()()()222i i i i i i i i i N N N N Ni i i i m x m y Y m z Z i N T m x y z m x y z m x y z ==X ====++++++=++∑&&&&&&L &&&&&&&&&L (1-1)(1-2)如果讨论是“保守力系”(指力学系统中的力所作之功,仅与起末位置有关,而与具体路径无关。
具有此性质的力场,一定可以引入一位置函数(,,)V x y z ,而此力所作之功为x y z F dx F dy F dz dV ++=-,按功与路径无关的性质,dV 应为一全微分V V VdV dx dy dz x y z∂∂∂=++∂∂∂,两式比较得,,i i i i i i V V V Y Z x y z ∂∂∂X =-=-=-∂∂∂,由此得到()()i i i i i id m x d x d T m m x ⎛⎫∂=== ⎪&&&&(1-6)于是,由(1-1)得0,0,0i i i i i i d T V d T V d T Vdt x x dt y y dt z z ⎛⎫⎛⎫⎛⎫∂∂∂∂∂∂+=+=+= ⎪ ⎪ ⎪∂∂∂∂∂∂⎝⎭⎝⎭⎝⎭&&& 引入拉格朗日函数111111(,,,,,,,,,,,,,)N N N N N N L L x y z x y z x y z x y z T V ==-&&&&&&L L ,可将(1-6)式写成 (1-7)将方程(1-7)的直角坐标,,x y z 换成广义坐标,即得描述具有s 个自由度系统的拉氏方程。
0(1,2,,)i id L Li s dt q q ⎛⎫∂∂-= = ⎪∂∂⎝⎭L & 2. 阻尼振动当速度不大时,阻力与速度的一次方成正比,方向相反,即-b &R =x运动方程变为m +k b &&&x x =-x,即 20+βω&&&x x +x = (1-8)其中b m β=,令t x Ae λ=,代入(1-8),得220+λβλω=+,解出'2i βλω-±=,其中'ωω≈=(因为阻尼系数β通常很小)。