双块式无砟轨道精调、粗调施工技术
- 格式:pdf
- 大小:766.69 KB
- 文档页数:5
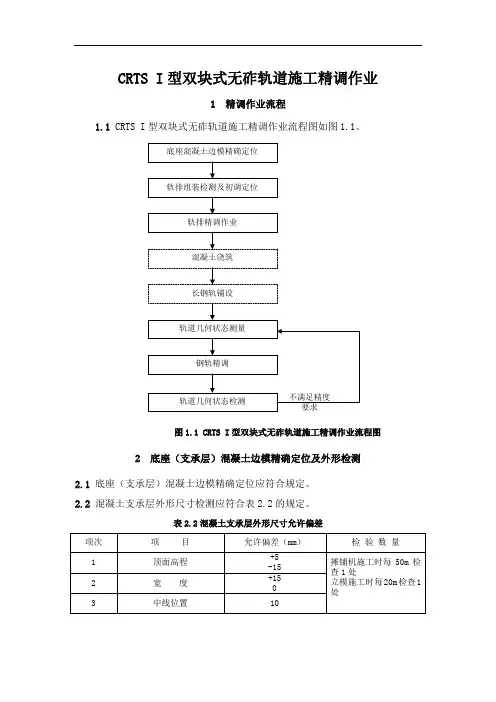
CRTS I型双块式无砟轨道施工精调作业1 精调作业流程1.1 CRTS I型双块式无砟轨道施工精调作业流程图如图1.1。
图1.1 CRTS I型双块式无砟轨道施工精调作业流程图2 底座(支承层)混凝土边模精确定位及外形检测2.1底座(支承层)混凝土边模精确定位应符合规定。
2.2混凝土支承层外形尺寸检测应符合表2.2的规定。
表2.2混凝土支承层外形尺寸允许偏差3 标准轨排组装检测及粗调定位3.1 轨排组装流程如图3.1。
图3. 1 轨排组装流程图3.2轨排组装检测应符合下列规定:1 用墨线在底座板上弹出轨排组纵、横向位置;2 双块式轨枕布枕允许偏差为±5mm;3 用钢尺丈量每两组轨排之间的纵向间距,在底座两边确定轨排的横向位置,如图3.2;图3.2 出轨排组位置示意图4 安装扣件及工具轨并检查外观质量。
5 轨排组装允许偏差应符合表3.2规定。
表3.2 轨排组装允许偏差3.3轨排粗调定位流程如图3.3。
图3.3 轨排粗调定位流程图3.4轨排粗调定位设备见表3.4。
表3.4轨排粗调定位设备表3.5轨排粗调定位测量与调整应遵循以下步骤:1 粗调设备支撑轨排;2 通过CPⅢ测量轨排;3 计算获得轨排调整量;4 按调整量调整轨排;5 轨排粗调到位后,安装螺杆固定轨排;6 螺杆支撑器安装的间距以2个轨枕距离为宜,每组轨排的端头应单独用螺杆支撑器加密;7安装轨排侧向固定装置。
3.6轨排粗调定位允许偏差差应符合表3.6的规定。
表3.6粗调定位允许偏差4 轨排精调作业4.1 轨排精调作业流程如图4.1。
图4.1 轨排精调作业流程图4.2轨排精调设备见表4.2。
表4.2轨排精调设备表4.3 轨排精调作业应遵循以下步骤:1将轨道几何状态测量仪置于待调轨道上,启动测量程序;2用程序控制的全站仪测量轨道几何状态测量仪上的棱镜,计算和显示轨道调整量;在每个螺杆支撑点进行平面位置和高程的调整;4 重复步骤2和3,直至满足轨道几何状态静态检测精度及允许偏差的要求;5 锁定侧向支撑装置,固定轨排。
CRTSI型双块式无砟轨道精调测量施工工法CRTSI型双块式无砟轨道精调测量施工工法一、前言CRTSI型双块式无砟轨道精调测量施工工法是一种在铁路铺设无砟轨道时的高精度施工工法。
通过对施工工法与实际工程之间的联系、采取的技术措施进行分析和解释,本文旨在让读者了解该工法的理论依据和实际应用。
二、工法特点CRTSI型双块式无砟轨道精调测量施工工法具有以下特点:1. 高精度:采用先进的测量技术,可实现毫米级的轨道位置控制,保证了轨道的平整度和几何稳定性。
2. 快速施工:采用机械化作业,配合高精度仪器设备和现代化施工方法,能够在短时间内完成轨道的铺设和调整。
3. 环保节能:无砟轨道减少了使用传统的道砟,减少了对环境的破坏,同时降低了工程的能耗和运维成本。
三、适应范围该工法适用于高速铁路、城市轨道交通和轻轨等各类铁路线路的无砟轨道施工和调整。
四、工艺原理CRTSI型双块式无砟轨道精调测量施工工法的工艺原理主要包括以下几点:1. 铺轨准备:测量轨道基线和参考点,确定施工的起点和终点。
清理施工段道床,喷涂钢轨相对位置标记。
2. 定位施工:使用高精度全站仪和激光系统,测量轨道的位置和高程,通过调整扳道器和螺栓实现轨道的位置校正。
3. 对齐调整:采用现代化调整设备,调整轨道的对中和水平度,保证轨道的几何稳定性。
4. 精度测量:使用高精度测量仪器对轨道的位置、高程和水平度进行检测和校正,确保满足设计要求。
5. 固定固定:施工完成后,使用紧固装置固定轨道,提高轨道的稳定性和使用寿命。
五、施工工艺1. 铺轨准备:测量轨道基线和参考点,清理道床,喷涂标记。
2. 定位施工:使用全站仪和激光系统测量轨道位置和高程,进行调整。
3. 对齐调整:使用调整设备进行对齐和水平度调整。
4. 精度测量:使用高精度测量仪器对轨道进行检测和校正。
5. 固定固定:使用紧固装置固定轨道。
六、劳动组织施工过程中需要合理组织施工人员,包括测量人员、调整人员、机械操作人员和安全监督人员等,确保施工过程的协调和高效进行。
双块式无砟轨道智能精调技术研究摘要:传统的CTRS双块式无砟轨道板的精调作业以人力为主,劳动强度高,施工成本高,且难以保证作业质量和效率。
基于中铁三局渝昆高铁川渝段站前五标无砟轨道施工,运用系统集成、数控技术和算法分析,采用了机动性好、便于操作的CTRS双块式无砟轨道板智能快速精调设备,实现了与全站仪和布板软件的数据接口,能自动地进行数据测量、传输和调整量计算,智能地快速完成轨道板的机械化自动调整。
采用了基于新型轨检小车测量系统的精调软件和精调机,能够实现测量数据读取准确率100%和伺服精准调节。
新一代智能精调技术可以和现有轨检小车配合使用,实现了测量数据共享和控制精调输出,能够进一步提高无砟轨道智能精调水平,达到高标准和高质量建设无砟轨道目标。
关键词:双块式无砟轨道;精调作业;智能快速精调设备;作业自动化引言我国高速铁路无砟轨道主要采用双块式无砟轨道形式,总运营里程达到约6850.0km,占全国高速铁路运营里程的60%。
随着“十四五”交通强国战略的提出,提升高速铁路建造水平迫在眉睫。
针对目前双块式无砟轨道施工工艺,研制了新一代智能化施工工装,并逐步在工程应用,达到国内领先水平。
1智能化精调施工技术1.1测量原理CTRS双块式无砟轨道智能化精调技术主要包含新型嵌套式轨排支撑架技术和智能精调机器人技术两部分。
将全站仪测量数据经由无线通讯系统实时发送到精调机器人控制系统,通过计算分析,将精调数据及精调动作指令发送至精调机器人执行系统,驱动机械臂将其自动准确定位到新型嵌套式轨排支撑架的竖向和横向调节螺杆上并与其连接,根据控制系统的精调数据及精调动作指令驱动轨排支撑架调节螺杆转动,从而完成对轨排各点高程和轨向的精确调整[1]。
智能精调设计流程如图1所示,智能化精调技术效果设计如图2所示。
图1智能精调机器人自动化精调创新技术设计流程图2 CTRS双块式无砟轨道智能化精调效果设计1.2新型轨排智能精调机基于上述第一代精调机存在的测量数据问题,利用现有轨检小车硬件和软件系统,优化了能够实时读取数据的新型轨排智能精调机。
武广客运专线雷达2000型双块式无砟轨道精调施工技术摘要:雷达2000型双块式无砟轨道,其设计标准高,施工控制严,对轨道几何尺寸要求极为精确,且施工一步到位。
在其施工工艺中起着决定性作用的便是轨道精调施工作业,它是决定轨道成败的关键所在。
如何控制轨道精调无疑对工程质量的控制提出了更大的挑战。
本文以轨道精调作业施工工艺为重点,首先给出了轨道总作业方法及标准,然后针对武广客运专线双块式无砟轨道施工系统说明轨道精调作业施工工艺,以保证工程施工质量。
关键词:客运专线轨道精调施工技术1 概述轨道精调是无砟轨道施工中非常关键的一道工序,它对轨道的几何尺寸最终位置能否达到设计及验标的要求起着决定性作用。
调试过程中要综合考虑测量精度误差、施工影响、环境影响、操作误差的因素,并留有一定的富余量(高程、轨距、中线、水平调试误差均控制在0.5mm以内),确保浇注砼后满足精度要求标准。
同时,严格控制钢轨接头误差,采用轨头钻孔、精调一遍后上鱼尾板的措施,消除轨排之间的错台、错牙,保证线路的平顺性。
2 总体作业方法及技术标准2.1 仪器设备无砟轨道精调施工主要采用的设备有:专业精调设备GRP1000S及相配套的全站仪、螺杆调节器、双头扳手等仪器设备2.2 作业方法待轨道粗调完成后,把精调专业设备运至施工现场打开检查,检查无误后开始组装轨检小车,完成后搬运至要调整的轨道上;在距轨检小车前方(轨道调整的方向)不大于100m处全站仪设站,同时检查全站仪设站处前后各100m范围内的CPⅢ桩是否完好,安装测量棱镜;全站仪设站完成后即可与轨检小车进行连接,连接好后小车在接收完数据后开始作业;根据小车上显示的数据利用双头扳手及套筒扳手调整钢轨底部安装的螺杆调节器使其轨道达到设计标准,满足《验标要求》。
2.3 轨道技术标准3 精调作业工艺流程4 具体精调作业工艺4.1 准备工作4.1.1 轨道精调专业设备的准备武广客运专线无砟轨道精调施工采用的是专业精调设备GRP1000S及其配套的仪器设备,在进行无砟轨道精调作业前应准备其一套性能良好、配备齐全的设备。
CRTS双块式无砟轨道轨排框架法智能机器人精调施工工法CRTS双块式无砟轨道轨排框架法智能机器人精调施工工法一、前言针对铁路线路施工中传统的繁琐、低效、易出错等问题,提出了CRTS双块式无砟轨道轨排框架法智能机器人精调施工工法。
该工法采用智能机器人进行施工,能够快速精确地完成轨道的铺设和调整,极大地提高了施工效率和质量。
二、工法特点1. 高效精准:该工法采用智能机器人进行施工,能够自动完成轨道的铺设和调整,大大减少了人力投入和施工时间,同时保证了施工的精度和稳定性。
2. 智能化:智能机器人搭载了先进的导航系统和测量设备,能够自主进行施工作业,具有一定的自学和调整能力,能够适应不同的工况和线路要求。
3. 环保节能:该工法采用双块式无砟轨道,不需要使用砟石进行填筑,减少了对环境的破坏,同时节约了大量的物料和能源。
4. 可重复使用:由于采用了轨道框架法,轨道可以随时进行拆卸和更换,方便后续维护和改造工作。
三、适应范围该工法适用于各类城市轨道交通和铁路线路的新建和改造施工,特别适合于隧道、弯道等复杂工况下的铺设和调整作业。
四、工艺原理本工法的工艺原理是基于CRTS(China Railway Track System)双块式无砟轨道技术和轨排框架法。
其实际工程应用中,先进行轨道线路的测量和设计,确定好施工参数和工艺要求。
然后,智能机器人根据设计要求进行自动导航和定位,并进行轨道的铺设和调整。
最后,进行精细调试和检测,确保轨道的质量和稳定性。
五、施工工艺1. 线路测量和设计:对轨道线路进行详细的测量和设计,确定好施工参数和轨道要求。
2. 智能机器人导航定位:智能机器人根据线路测量数据进行自动导航和定位,确保施工的精度和准确性。
3. 轨道铺设:智能机器人根据设计要求进行轨道的铺设,通过自动控制系统,调整轨道的高度和水平度。
4. 信号调整:根据铺设完成的轨道进行信号调整,确保轨道的通畅性和安全性。
5. 质量检测和验收:对铺设完成的轨道进行质量检测和验收,确保轨道的质量和稳定性。
双块式无砟道床施工工艺及方法(1)施工方法在交接后的线下工程上放样出底座板边线,然后支立模板,绑扎钢筋网片,在模板内浇筑混凝土至设计标高并振捣,待混凝土达到设计强度的75%拆除模板,将模板运至前方开始下一个施工循环。
双块式无砟轨道道床板轨排法施工,主要由标准工具轨、轨道扣件、轨枕、整体道床组成。
在施工中采用人工配合机械布设轨枕的方式,利用龙门吊将标准的工具轨吊装在布设好的轨枕承轨台上,安装扣件,组装成轨排,使用螺杆调节器调整轨排。
轨排经粗调、精调达到验收标准后,浇筑混凝土,形成无砟轨道。
(2)施工工艺流程无砟道床施工工艺流程图如下所示:(3)施工工艺操作要点①施工准备A.施工前应根据施工内容准备相关施工、设计文件。
熟悉掌握无砟道床相关规范、规程、标准、技术条件及指南等。
B.结构物沉降变形及CPⅢ测设通过评估。
接收和复核线下有关施工技术文件,包括线下构筑物测量资料、桩橛和与轨道工程有关的变更设计、线下工程施工质量检验合格报告等。
C.隧道基底凿毛。
D.桥梁隔离层铺设。
②施工放样清除基底或隔离层表面的杂物及灰尘,利用CPⅢ点在基底或隔离层上放样出轨道中心线及轨枕边线,偏差不超过2mm。
根据梁缝宽度计算和调整轨枕间距,标记梁端轨枕位置(到梁缝中线位置设计为325mm或300mm)。
③绑扎底层钢筋A.钢筋原材进场之后,经试验室检测合格后在钢筋加工厂统一加工,严格按照施工图纸的设计尺寸下料。
钢筋加工好之后,利用运输车辆按照规格型号绑扎成束,运送至施工作业面。
B.根据道床板钢筋布置图在基底或隔离层上画出道床板底层钢筋布设间距。
按设计间距布设底层钢筋,底层钢筋用绝缘卡进行绑扎,底层保护层垫块以每平米至少4个布设。
④轨枕铺设下层钢筋绑扎完成后,根据轨枕布置间距安放轨枕垫木支撑,避免轨枕铺放后将绑扎过的底层钢筋网片破坏。
布设轨枕时,按照轨枕边线及设计间距进行布设。
⑤组装轨排、锚固销钉A.按设计安装扣件,采用电动扭力扳手紧固扣件组装轨排,扭矩符合设计要求。
双块式无砟轨道工具轨法施工技术摘要:双块式无砟轨道工具轨法施工技术是在引进、吸收德国Rheda2000无砟轨道技术的基础上,结合国内实际通过再创新研发出的综合施工技术和配套工装。
本文结合武广客运专线桥梁上无砟轨道施工实际,介绍了工具轨法施工的施工工艺、及技术措施。
关键词:双块式轨枕无砟轨道工具轨法施工技术1、概述—术语无砟轨道——用整体混凝土结构代替传统有砟轨道中的轨枕和散粒体碎石道床的轨道结构。
双块式轨枕——采用钢筋桁架连接两块混凝土支承块而形成的轨枕,是双块式无砟轨道的主要部件。
双块式无砟轨道——将预制的双块式轨枕组装成轨排,以现场浇筑混凝土方式将轨枕浇入均匀连续的钢筋混凝土道床内,并适应ZPW-2000轨道电路的无砟轨道结构形式。
混凝土道床板——现场浇筑的埋设双块式轨枕或混凝土岔枕的整体钢筋混凝土层。
工具轨法——即先组装调整好轨排的几何形位,由工具轨位置确定轨枕在轨道板中的位置,然后现场灌筑道床混凝土。
2、桥梁上双块式无砟轨道结构组成桥梁上双块式无砟轨道结构由上至下组成依次为:工具轨——双块式轨枕——现浇混凝土道床板——桥面凸台——桥面保护层——预制箱梁梁体3、桥梁上双块式无砟轨道工具轨法施工工艺施工准备布设精测网、安装设备——轨枕、纵向钢筋运输、存放——下部结构清理铺设土工布——放轨道中线安装横向模板基座条——放置纵向钢筋——散放轨枕——铺工具轨安托轨盘——轨道粗调安装螺杆——钢筋绑扎、接地焊接——安装纵、横向模板——轨道精调——浇筑混凝土——混凝土养护——拆模、拆螺杆调节器和工具轨——填塞螺杆孔4、桥梁上双块式无砟轨道施工技术措施4.1散布轨枕施工使用散枕装置将轨枕按照所需间距放置在设计位置。
在散枕前将轨枕运送到位并堆垛码放,应保证已堆跺的轨枕不影响粗调以及精调作业时全站仪的通视。
轨枕卸载下来之后放置轨枕以前应完成以下质量验收:混凝土表面局部损坏、裂缝、钢筋变形等。
轨枕在放置到下部结构上时,必须符合规定的间距。
双块式无砟轨道施工技术【摘要】本文对高速铁路双块式无砟轨道施工技术进行了阐述和探讨,为高速铁路无砟轨道施工提供一定的经验。
【关键词】双块式无砟轨道;施工技术1、工程概况本工程项目位于新疆吐鲁番地区管辖的鄯善县和吐鲁番市境内,标段起于新疆吐鲁番地区和哈密地区交界附近(dk1489+000),向西延伸至新建吐鲁番北站西端出站(dk1679+000),全长187.905km,主要经过的周边城镇有鄯善火车站镇(吐哈油田鄯善基地),鄯善县城、连木沁镇、吐鲁番市等。
设计双块式无砟道床374.154km。
2、施工方案2.1现场准备施工作业层中所涉及的各种外部技术数据收集、整理、统计。
配齐生活、办公设施,满足主要管理、技术人员进场生活、办公需要。
配齐施工用各种施工机具,满足施工所需。
2.1.1cpⅲ的建网与复核;底座板(支承层)通过验收并清洁。
2.1.2双块式轨枕通过验收并运至现场,并按要求存放。
2.1.3混凝土供应(拌合站、罐车、泵车)、施工机具、工装设备、辅助材料、劳动力配置到位。
2.2主要技术参数双块式无砟轨道铺设采用工具轨法施工。
双块式无砟轨道结构由钢轨、扣件、道床板、支承层组成。
其轨道结构高度为:路基段双块式无砟轨道结构高度为815mm,其中钢轨顶面至道床板顶面290mm,道床板厚度为260mm,混凝土支承层厚度为265mm。
桥梁段双块式无砟轨道结构高度为725mm,钢轨顶面至道床板顶面290mm,道床板厚度为260mm,底座混凝土厚度为175mm。
路基直线段道床板顶面以线路中心设置0.7%横向排水坡,道床板内侧与道床板外侧的高差为20mm,道床板的厚度是以轨道中心为标准厚度260mm,线路外侧较内侧低;桥梁直线段道床板顶面以轨道中心设置0.7%人字形排水坡,道床板轨道中心线与道床板两侧的高差为10mm,道床板的厚度是以轨道中心为标准厚度260mm,轨道两侧较低。
道床板结构内除接地钢筋外的纵横向钢筋交叉点及纵向钢筋与轨枕桁架钢筋交叉点均采用绝缘卡进行绝缘。
CRTSⅡ型双块式无砟轨道无缝长钢轨精调施工工法CRTSⅡ型双块式无砟轨道无缝长钢轨精调施工工法一、前言随着铁路建设的发展,无砟轨道系统在高速铁路工程中得到了广泛应用。
而CRTSⅡ型双块式无砟轨道无缝长钢轨作为一种新型的轨道系统,其施工工法的研究和改进具有重要意义。
本文将详细介绍CRTSⅡ型双块式无砟轨道无缝长钢轨精调施工工法的特点、适应范围、工艺原理、施工工艺、劳动组织、机具设备、质量控制、安全措施、经济技术分析和工程实例。
二、工法特点CRTSⅡ型双块式无砟轨道无缝长钢轨精调施工工法具有以下特点:施工高效、精确度高、适应性强、施工周期短、无环境污染、使用寿命长等。
三、适应范围CRTSⅡ型双块式无砟轨道无缝长钢轨精调施工工法适用于各类高速客运铁路和重载货运铁路的施工,可以适应各种地质条件和环境要求。
四、工艺原理CRTSⅡ型双块式无砟轨道无缝长钢轨精调施工工法的基本原理是通过控制精确的施工参数,将两根长钢轨的轨距、水平标准、纵向曲线千斤顶和轨向进行精确调整,以确保轨道的准确平直和减小轮轨磨耗。
五、施工工艺施工工艺可以分为预施工准备、入场试铺、轨道精调、施工后处理和验收等阶段。
在预施工准备阶段,根据设计要求准备好相关工具和材料,并确定施工计划。
入场试铺阶段,通过试铺工作确定轨道的基准线和标高。
然后进行轨道精调,包括轨距调整、纵向曲线调整和轨向调整。
施工后处理阶段是铺装道石、清理轨道、检查轨道的阶段。
最后进行验收,并做相关记录和报告。
六、劳动组织根据施工周期和施工量的不同,确定合理的劳动组织方式以确保施工进度和质量。
在施工过程中,应严格按照劳动组织计划进行施工,并合理安排施工人员的工作任务。
七、机具设备CRTSⅡ型双块式无砟轨道无缝长钢轨精调施工工法所需的机具设备有轨道调整机、剪切机、叉车、吊车、挖掘机、打磨机等。
这些机具设备具有高效、可靠和易操作的特点,能够满足施工需要。
八、质量控制为了确保施工质量达到设计要求,在施工过程中需要进行精确的质量控制。