- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
y f ( x, y),
y(
x0
)
y0 .
x [x0 , b],
(1.1) (1.2)
如果存在实数L>0,使得
f ( x, y1 ) f ( x, y2 ) L y1 y2 , y1, y2 R. (1.3)
则称f关于y满足利普希茨(Lipschitz)条件,L称为y的
利普希茨常数(简称Lips.常数).
定理1 设f在区域D={(x, y)|axb,yR}上连续, 关 于y满足利普希茨条件,则对任意x0[a, b], y0R,常 微分方程初值问题(1.1)式和(1.2)式当x[a, b]时存在唯 一的连续可微解y(x) .
解的存在唯一性定理是常微分方程理论的基本内 容,也是数值方法的出发点,此外还要考虑方程的解 对扰动的敏感性,它有以下结论.
y1 y0 hf (x0, y0 ),
y2 y1 hf (x1, y1),
例1 用欧拉公式求解初值问题
y
y
2x y
(0 x 1),
y(0) 1.
(2.2)
解 取步长h=0.1,欧拉公式的具体形式为
yn1
yn
h( yn
2xn yn
)
其中xn=nh=0.1n (n=0,1,,10), 已知y0 =1, 由此式可得
它表明f满足利普希茨条件,且L的大小反映了右端函 数f关于y变化的快慢,刻画了初值问(1.1)式和(1.2)式 是否为好条件. 这在数值求解中也是很重要的.
虽然求解常微分方程有各种各样的解析方法,但
解析方法只能用来求解一些特殊类型的方程,实际问
题中归结出来的微分方程主要靠数值解法.
所谓数值解法, 就是寻求解y(x)在一系列离散节点
定理2 设f在区域D (如定理1所定义) 上连续, 且 关于y满足利普希茨条件,设初值问题
y( x) f ( x, y), y( x0 ) s.
的解为y(x, s),则
y( x, s1 ) y( x, s2 ) e L xx0 s1 s2 .
这个定理表明解对初值依赖的敏感性,它与右端
函数f有关,当f的Lips.常数L比较小时,解对初值和
y1
y0
h(
y0
2 x0 y0
)
1
0.1
1.1
y2
y1
h( y1
2 x1 y1
)
1.1
0.1(1.1
0.2 ) 1.1
1.191818
依次计算下去,部分计算结果见下表.
xn 欧拉公式数值解yn 准确解y(xn)
0.2 1.191818
1.183216
0.4 1.358213
1.341641
0.6 1.508966
1.483240
0.8 1.649783
1.612452
1.0 1.784770
1.732051
误差 0.008602 0.016572 0.025726 0.037331 0.052719
与准确解 y 1 2x相比,可看出欧拉公式的计算结
果精度很差.
9.2 简单的数值方法
9.2.1 欧拉法与后退欧拉法 我们知道,在xy平面上,微分方程(1.1)式的解
y=f(x)称作它的积分曲线,积分曲线上一点(x, y)的切 线斜率等于函数f(x, y)的值. 如果按f(x, y)在xy平面上 建立一个方向场,那么,积分曲线上每一点的切线 方向均与方向场在该点的方向相一致.
点Pn,Pn+1的坐标有关系
yn1 yn xn1 xn
yn1 h
yn
f ( xn, yn )
y( xn )
f ( xn , y( xn )),
即
yn1 yn 名的(显式)欧拉(Euler)公式. 若初值y0已知, 则依公式(2.1)可逐次逐步算出各点数值解.
本章首先要对常微分方程(1.1)离散化,建立求解 数值解的递推公式. 一类是计算yn+1时只用到前一点的 值yn,称为单步法. 另一类是用到yn+1前面 k 点的值 yn,yn-1,, yn-k+1,称为k步法. 其次,要研究公式的局部 截断误差和阶,数值解yn与精确解y(xn)的误差估计及 收敛性,还有递推公式的计算稳定性等问题.
基于上述几何解释,我们从初始点P0(x0, y0)出发, 先依方向场在该点的方向推进到x=x1上一点P1,然后 再从P1点依方向场在该点的方向推进到 x=x2 上一点 P2 , 循环前进做出一条折线P0 P1 P2.
一般地,设已做出该折线的顶点Pn,过Pn(xn, yn)依
方向场的方向再推进到Pn+1(xn+1, yn+1),显然两个顶
右端函数相对不敏感,可视为好条件. 若L较大则可
认为坏条件,即病态问题.
如果右端函数可导,由中值定理有
f ( x, y1 )
f (x, y2 )
f ( x, )
y
y1
y2 , 在y1, y2之间.
若假定
f
( x, y
y)
在域D内有界,
设
f ( x, y) y
L, 则
f ( x, y1 ) f ( x, y2 ) L y1 y2 .
x1 x2 xn xn1
上的近似值 y1,y2,,yn,yn+1,. 相邻两个节点的间距 hn=xn+1-xn称为步长. 今后如不特别说明,总是假定 hi=h(i=1,2,)为常数, 这时节点为xn=x0+nh(i=0,1,2,) (等距节点).
初值问题的数值解法有个基本特点,他们都采取 “步进式”,即求解过程顺着节点排列的次序一步一 步地向前推进. 描述这类算法,只要给出用已知信息 yn,yn-1,yn-2,计算yn+1的递推公式.
第十三讲常微分方 程初值问题数值解
法
9.1 引 言
科学技术中很多问题都可用微分方程的定解问题
来描述,主要有初值问题与边值问题两大类,本章只
考虑初值问题. 常微分方程初值问题中最简单的例子
是人口模型,设某特定区域在t0时刻人口为y(t0)=y0已
知的,该区域的人口自然增长率为,人口增长与人
口总数成正比,所以t时刻的人口总数y(t)满足以下微
分方程
y y(t),
y(
t
0
)
y0 .
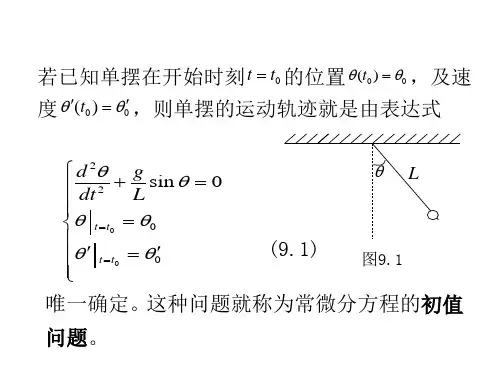
很多物理系统与时间有关,从卫星运行轨道到单
摆运动,从化学反应到物种竞争都是随时间的延续而
不断变化的. 解常微分方程是描述连续变化的数学语
言,微分方程的求解就是确定满足给定方程的可微函
数y(t),研究它的数值方法是本章的主要目的. 考虑一
阶常微分方程的初值问题