第2章教材习题解答
- 格式:doc
- 大小:76.00 KB
- 文档页数:6
第二章原子结构和元素周期律习题解答1.指出下列各原子轨道相应的主量子数n及角量子数l的数值是多少?轨道数分别是多少?2p 3d 4s 4f 5s【解答】 2p 主量子数2,角量子数1,轨道数33d 主量子数3,角量子数2,轨道数54s 主量子数4,角量子数0,轨道数14f 主量子数4,角量子数3,轨道数75s 主量子数5,角量子数0,轨道数1 2.当主量子数n=4时,可能有多少条原子轨道?分别用Ψn,l,m 表示出来。
电子可能处于多少种运动状态?(考虑自旋在内)【解答】当n=4时,可能有n2=16条原子轨道。
n l M4 01230,±10,±1,±20,±1,±2,±3Ψ4,0,0,Ψ4,1,0,Ψ4,1,1,Ψ4,1,-1,Ψ4,2,0,Ψ4,2,1,Ψ4,2,-1,Ψ4,2,2,Ψ4,2,-2,Ψ4,3,0,Ψ4,3,1,Ψ4,3,-1,Ψ4,3,2,Ψ4,3,-2,Ψ4,3,3,Ψ4,3,-3 每条轨道上可以容纳两个自旋相反的电子,16条原子轨道,电子可能处于32种运动状态。
3.将下列轨道上的电子填上允许的量子数。
(1)n=,l=2,m=0,ms=±1/2(2)n=2,l= ,m=0,ms=±1/2(3)n=4,l=2,m= ,ms=-1/2(4)n=3,l=2,m=2,m=s=-1/2(5)n=2,l= ,m=-1,ms=+1/2(6)n=5,l=0,m= ,ms【解答】(1) 3,4,5,……,正整数;(2) 0,1(3) 0,±1,±2(4) +1/2,-1/2(5) 1(6) 04.填上n、l、m、m s等相应的量子数:量子数确定多电子原子轨道能量E的大小;Ψ的函数式则是由量子数所确定;确定核外电子运动状态的量子数是;原子轨道或电子云的角度分布图的不同情况取决于量子数。
【解答】主量子数n和角量子数l;主量子数n、角量子数l和磁量子数m;主量子数n、角量子数l、磁量子数m和自旋量子数m;s 角量子数l和磁量子数m。
机械制造工艺学部分习题解答2第二章:机械加工工艺规程设计(第3版P94)2-1何谓机械加工工艺规程?工艺规程在生产中起何作用?概念题,见教材P25.2-2简述机械加工工艺过程卡和工序卡的主要区别以及它们的应用场合?概念题,见教材P25.2-3简述机械加工工艺过程的设计原则、步骤和内容。
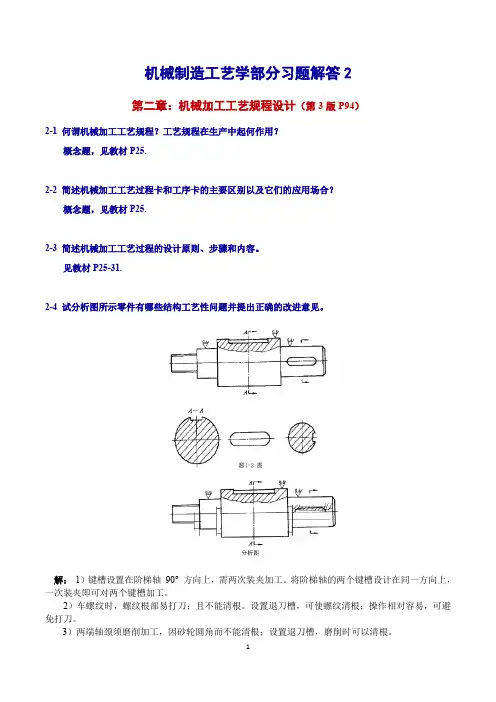
见教材P25-31.2-4试分析图所示零件有哪些结构工艺性问题并提出正确的改进意见。
解:1)键槽设置在阶梯轴90°方向上,需两次装夹加工。
将阶梯轴的两个键槽设计在同一方向上,一次装夹即可对两个键槽加工。
2)车螺纹时,螺纹根部易打刀;且不能清根。
设置退刀槽,可使螺纹清根;操作相对容易,可避免打刀。
3)两端轴颈须磨削加工,因砂轮圆角而不能清根;设置退刀槽,磨削时可以清根。
2-7何谓经济精度?选择加工方法时应考虑的主要问题有哪些?答:(P34)经济精度——在正常加工条件下(采用符合质量标准的设备、工艺装备和标准技术等级的工人,不延长加工时间)所能保证的加工精度和表面粗糙度。
选择加工方法时应考虑(P35):根据零件表面、零件材料和加工精度以及生产率要求,考虑本厂现有的工艺条件,考虑加工经济精度等因素。
2-8在大批量生产条件下,加工一批直径为,长度为58mm的光轴,其表面粗糙度,材料为45钢,试安排其加工路线。
答:粗车——半精车——粗磨——精磨——精密磨削。
2-9图4-71所示箱体零件的两种工艺安排如下:(1)在加工中心上加工:粗、精铣底面;粗、精铣顶面;粗镗、半精镗、精镗Φ80H7孔和60H7孔;粗、精铣两端面。
(2)在流水线上加工:粗刨、半精刨底面,留精刨余量;粗、精铣两端面;粗镗削、半精镗Φ80H7孔和60H7孔,留精镗余量;粗刨、半精刨、精刨顶面;精镗Φ80H7孔和60H7孔;精刨底面。
试分别分析上述两种工艺安排有无问题,若有问题请提出改进意见。
答:(1)应在先加工底面、顶面之后,加工两端面,因为底面、端面是定位表面,定位表面加工之后,再进行镗孔。
弹簧下悬挂一物体,弹簧静伸长为δ。
设将物体向下拉,使弹簧有静伸长3δ,然后无初速度地释放,求此后的运动方程。
解:设物体质量为m ,弹簧刚度为k ,则:mg k δ=,即:n ω==取系统静平衡位置为原点0x =,系统运动方程为: δ⎧+=⎪=⎨⎪=⎩00020mx kx x x (参考教材P14)解得:δω=()2cos n x t t弹簧不受力时长度为65cm ,下端挂上1kg 物体后弹簧长85cm 。
设用手托住物体使弹簧回到原长后无初速度地释放,试求物体的运动方程、振幅、周期及弹簧力的最大值。
解:由题可知:弹簧的静伸长0.850.650.2()m =-=、 所以:9.87(/)0.2n g rad s ω=== 取系统的平衡位置为原点,得到:系统的运动微分方程为:20n x x ω+=其中,初始条件:(0)0.2(0)0x x =-⎧⎨=⎩ (参考教材P14) 所以系统的响应为:()0.2cos ()n x t t m ω=-弹簧力为:()()cos ()k n mg F kx t x t t N ω===- 因此:振幅为、周期为2()7s π、弹簧力最大值为1N 。
重物1m 悬挂在刚度为k 的弹簧上并处于静平衡位置,另一重物2m 从高度为h 处自由落到1m 上而无弹跳,如图所示,求其后的运动。
<解:取系统的上下运动x 为坐标,向上为正,静平衡位置为原点0x =,则当m 有x 位移时,系统有: 2121()2T E m m x =+ 212U kx =由()0T d E U +=可知:12()0m m x kx ++= 即:12/()n k m m ω=+系统的初始条件为:⎧=⎪⎨=-⎪+⎩2020122m gx k m x gh m m (能量守恒得:221201()2m gh m m x =+) 因此系统的响应为:01()cos sin n n x t A t A t ωω=+其中:ω⎧==⎪⎨==-⎪+⎩200021122n m g A x k x m g ghk A k m m即:ωω=-2()(cos )n n m g x t t t k "一质量为m 、转动惯量为I 的圆柱体作自由纯滚动,圆心受到一弹簧k 约束,如图所示,求系统的固有频率。
第2章习题答案:9.企业可以接受订货。
通过固定成本与可变成本概念的来分析,如果企业再生产200吨的产品,此时固定成本不会发生变化,只会增加变动成本,所以可以接受订货。
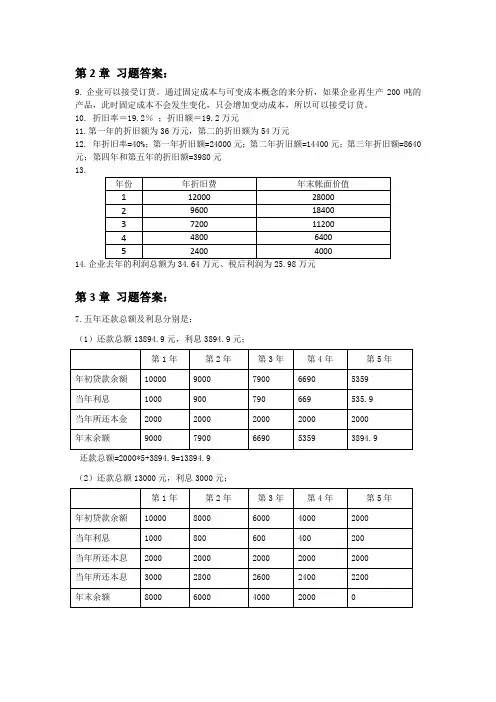
10. 折旧率=19.2%;折旧额=19.2万元11.第一年的折旧额为36万元,第二的折旧额为54万元12. 年折旧率=40%;第一年折旧额=24000元;第二年折旧额=14400元;第三年折旧额=8640元;第四年和第五年的折旧额=3980元13.14.企业去年的利润总额为34.64万元、税后利润为25.98万元第3章习题答案:7.五年还款总额及利息分别是:(1)还款总额13894.9元,利息3894.9元;还款总额=2000*5+3894.9=13894.9(2)还款总额13000元,利息3000元;(3)还款总额15000元,利息5000元;每年利息额=10000╳10%=1000元5年利息总额=1000╳5=5000元(4)还款总额16105.1元,利息6105.1元; F=10000╳(1+10%)5=16105.1(5)还款总额13190元,利息3190元;A=10000╳10%×(1+10)(1+10%5−15=2638元5年本利和F=2638╳5=131908.每月要存入银行60元9.现值P=411261元,终值F=1258047元,年值A=91670元10.通过比较两种付款方式所支付贷款的现值大小来进行付款方式的选择,一次性付款的现值为440万元,分期付款的现值为456.57万元,因此应选择一次性付款方式。
11.A=57389.03元12.每年取款A=198万元〈250万元,所以不能实现。
13.A=8380.30元14.P=46666.67万元15.F=12796.9元16.n=7.83年第4章习题答案:8.增量投资回收期为4年,选择乙方案。
9.NPV=-18000+3000╳(p/A,15%.10)+3000(P/F,15%,10)=-18000+3000╳5.0188+3000╳0.2472=-18000+15056.4+741.6=-2202(元)<0,不应该购买此机械。
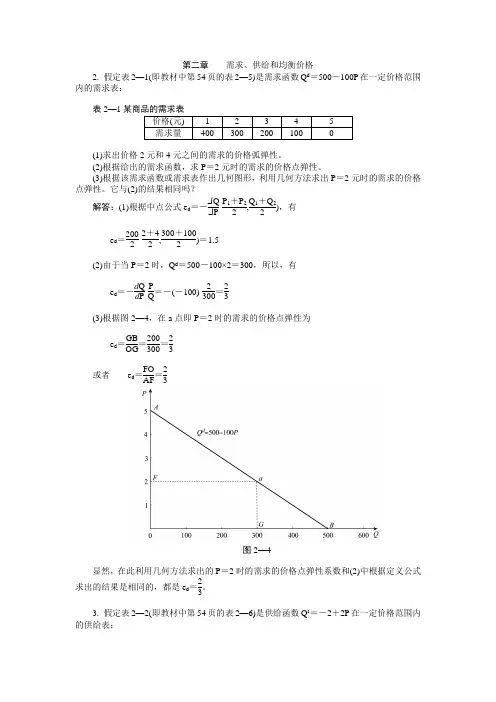
第二章 需求、供给和均衡价格2. 假定表2—1(即教材中第54页的表2—5)是需求函数Q d =500-100P 在一定价格范围内的需求表:表2—1某商品的需求表 价格(元) 1 2 3 4 5需求量 400 300 200 100 0(1)求出价格2元和4元之间的需求的价格弧弹性。
(2)根据给出的需求函数,求P =2元时的需求的价格点弹性。
(3)根据该需求函数或需求表作出几何图形,利用几何方法求出P =2元时的需求的价格点弹性。
它与(2)的结果相同吗?解答:(1)根据中点公式e d =-ΔQ ΔP ·P 1+P 22,Q 1+Q 22),有e d =2002·2+42,300+1002)=1.5(2)由于当P =2时,Q d =500-100×2=300,所以,有e d =-d Q d P ·P Q =-(-100)·2300=23(3)根据图2—4,在a 点即P =2时的需求的价格点弹性为e d =GB OG =200300=23或者 e d =FO AF =23图2—4显然,在此利用几何方法求出的P =2时的需求的价格点弹性系数和(2)中根据定义公式求出的结果是相同的,都是e d =23。
3. 假定表2—2(即教材中第54页的表2—6)是供给函数Q s =-2+2P 在一定价格范围内的供给表:表2—2某商品的供给表 价格(元) 2 3 4 5 6供给量 2 4 6 8 10(1)求出价格3元和5元之间的供给的价格弧弹性。
(2)根据给出的供给函数,求P =3元时的供给的价格点弹性。
(3)根据该供给函数或供给表作出几何图形,利用几何方法求出P =3元时的供给的价格点弹性。
它与(2)的结果相同吗?解答:(1)根据中点公式e s =ΔQ ΔP ·P 1+P 22,Q 1+Q 22),有e s =42·3+52,4+82)=43(2)由于当P =3时,Q s =-2+2×3=4,所以,e s =d Q d P ·P Q =2·34=1.5。

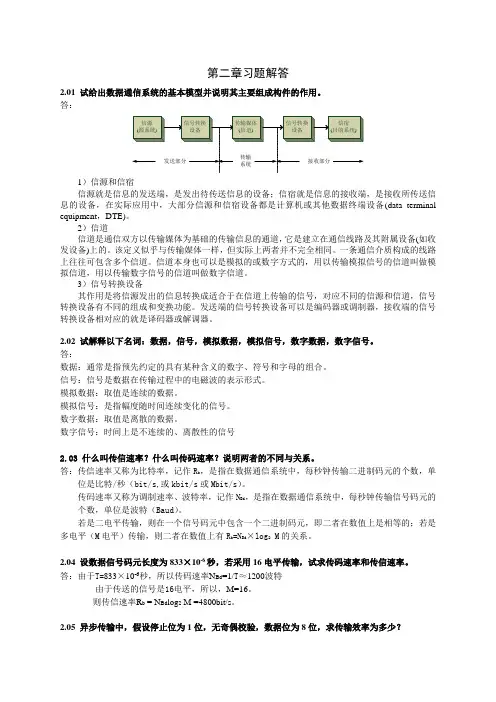
第二章习题解答2.01 试给出数据通信系统的基本模型并说明其主要组成构件的作用。
答:1)信源和信宿信源就是信息的发送端,是发出待传送信息的设备;信宿就是信息的接收端,是接收所传送信息的设备,在实际应用中,大部分信源和信宿设备都是计算机或其他数据终端设备(data terminal equipment,DTE)。
2)信道信道是通信双方以传输媒体为基础的传输信息的通道,它是建立在通信线路及其附属设备(如收发设备)上的。
该定义似乎与传输媒体一样,但实际上两者并不完全相同。
一条通信介质构成的线路上往往可包含多个信道。
信道本身也可以是模拟的或数字方式的,用以传输模拟信号的信道叫做模拟信道,用以传输数字信号的信道叫做数字信道。
3)信号转换设备其作用是将信源发出的信息转换成适合于在信道上传输的信号,对应不同的信源和信道,信号转换设备有不同的组成和变换功能。
发送端的信号转换设备可以是编码器或调制器,接收端的信号转换设备相对应的就是译码器或解调器。
2.02 试解释以下名词:数据,信号,模拟数据,模拟信号,数字数据,数字信号。
答:数据:通常是指预先约定的具有某种含义的数字、符号和字母的组合。
信号:信号是数据在传输过程中的电磁波的表示形式。
模拟数据:取值是连续的数据。
模拟信号:是指幅度随时间连续变化的信号。
数字数据:取值是离散的数据。
数字信号:时间上是不连续的、离散性的信号2.03 什么叫传信速率?什么叫传码速率?说明两者的不同与关系。
答:传信速率又称为比特率,记作R b,是指在数据通信系统中,每秒钟传输二进制码元的个数,单位是比特/秒(bit/s,或kbit/s或Mbit/s)。
传码速率又称为调制速率、波特率,记作N Bd,是指在数据通信系统中,每秒钟传输信号码元的个数,单位是波特(Baud)。
若是二电平传输,则在一个信号码元中包含一个二进制码元,即二者在数值上是相等的;若是多电平(M电平)传输,则二者在数值上有R b=N Bd×log2 M的关系。
2.1 弹簧下悬挂一物体,弹簧静伸长为δ。
设将物体向下拉,使弹簧有静伸长3δ,然后无初速度地释放,求此后的运动方程。
解:设物体质量为m ,弹簧刚度为k ,则:mg k δ=,即:n ω==取系统静平衡位置为原点0x =,系统运动方程为: δ⎧+=⎪=⎨⎪=⎩00020mx kx x x (参考教材P14)解得:δω=()2cos n x t t2.2 弹簧不受力时长度为65cm ,下端挂上1kg 物体后弹簧长85cm 。
设用手托住物体使弹簧回到原长后无初速度地释放,试求物体的运动方程、振幅、周期及弹簧力的最大值。
解:由题可知:弹簧的静伸长0.850.650.2()m =-= 所以:9.87(/)0.2n g rad s ω=== 取系统的平衡位置为原点,得到:系统的运动微分方程为:20n x x ω+=其中,初始条件:(0)0.2(0)0x x =-⎧⎨=⎩ (参考教材P14) 所以系统的响应为:()0.2cos ()n x t t m ω=-弹簧力为:()()cos ()k n mg F kx t x t t N ω===-因此:振幅为0.2m 、周期为2()7s π、弹簧力最大值为1N 。
2.3 重物1m 悬挂在刚度为k 的弹簧上并处于静平衡位置,另一重物2m 从高度为h 处自由落到1m 上而无弹跳,如图所示,求其后的运动。
解:取系统的上下运动x 为坐标,向上为正,静平衡位置为原点0x =,则当m 有x 位移时,系统有: 2121()2T E m m x =+ 212U kx =由()0T d E U +=可知:12()0m m x kx ++= 即:12/()n k m m ω=+系统的初始条件为:⎧=⎪⎨=-⎪+⎩2020122m gx k m x gh m m (能量守恒得:221201()2m gh m m x =+) 因此系统的响应为:01()cos sin n n x t A t A t ωω=+其中:ω⎧==⎪⎨==-⎪+⎩200021122n m g A x k x m g ghk A k m m即:ωω=-2()(cos )n n m g x t t t k2.4 一质量为m 、转动惯量为I 的圆柱体作自由纯滚动,圆心受到一弹簧k 约束,如图所示,求系统的固有频率。
第2章习题解答一、填空1.进程在执行过程中有3种基本状态,它们是运行态、就绪态和阻塞态。
2.系统中一个进程由程序、数据集合和进程控制块(PCB)三部分组成。
3.在多道程序设计系统中,进程是一个动态概念,程序是一个静态概念。
4.在一个单CPU系统中,若有5个用户进程。
假设当前系统为用户态,则处于就绪状态的用户进程最多有4 个,最少有0 个。
注意,题目里给出的是假设当前系统为用户态,这表明现在有一个进程处于运行状态,因此最多有4个进程处于就绪态。
也可能除一个在运行外,其他4个都处于阻塞。
这时,处于就绪的进程一个也没有。
5.总的来说,进程调度有两种方式,即不可剥夺方式和剥夺方式。
6.进程调度程序具体负责中央处理机(CPU)的分配。
7.为了使系统的各种资源得到均衡使用,进行作业调度时,应该注意CPU忙碌作业和I/O忙碌作业的搭配。
8.所谓系统调用,就是用户程序要调用操作系统提供的一些子功能。
9.作业被系统接纳后到运行完毕,一般还需要经历后备、运行和完成三个阶段。
10.假定一个系统中的所有作业同时到达,那么使作业平均周转时间为最小的作业调度算法是短作业优先调度算法。
11.在引入线程的操作系统中,所谓“线程”,是指进程中实施处理机调度和分配的基本单位。
12.有了线程概念后,原来的进程就属于是单线程的进程情形。
二、选择1.在进程管理中,当C 时,进程从阻塞状态变为就绪状态。
A.进程被调度程序选中B.进程等待某一事件发生C.等待的事件出现D.时间片到2.在分时系统中,一个进程用完给它的时间片后,其状态变为A 。
A.就绪B.等待C.运行D.由用户设定3.下面对进程的描述中,错误的是D 。
A.进程是动态的概念B.进程的执行需要CPUC.进程具有生命周期D.进程是指令的集合4.操作系统通过B 对进程进行管理。
A.JCB B.PCB C.DCT D.FCB 5.一个进程被唤醒,意味着该进程D 。
A.重新占有CPU B.优先级变为最大C.移至等待队列之首D.变为就绪状态6.由各作业JCB形成的队列称为C 。
第二章一、填空题1、在室温附近,温度每升高1°С,二极管导通正向压降on U 约 减小2~2.5 mV 。
温度每升高10°С,反向电流约 增大一倍 。
2、最大整流电流F I 定义为二极管 长期运行允许通过的最大正向平均 电流。
3、最高反向工作电压RM U 是允许施加在二极管两端的 最大反向电压 。
通常规定为反向击穿电压BR U 的 一半 。
4、理想二极管模型是将二极管看作一个 开关 ,加正向电压 导通 ,导通时正向压降为零 ;加反向电压 截止 ,截止时 电流 为零。
5、二极管正向电阻越 小 ,反向电阻越 大 ,表明 单向导电特性 好。
若正反向电阻均趋于0,表明二极管 击穿损坏 。
若正反向电阻均趋于无穷大,表明二极管 开路损坏 。
6、稳压管的反向击穿特性很 陡 ,反相击穿时,电流虽然在很大范围内变化,但稳压管的 电压 变化却很小。
7、稳压管处于稳压工作时电压特性应 反 偏,并应有合适的工作 电流 。
8、稳压管是通过自身的 电流 调节作用,并通过限流电阻R ,转化为 电压 调节作用,从而达到稳定电压的目的。
二、选择题1、反映二极管质量的参数是 C 。
A 、最大整流电流F IB 、最高反向工作电压RM UC 、反向饱和电流S ID 、最高工作频率M f2、温度升高后,二极管正向压降将 B ,反向电流将 A 。
A 、增大 B 、减小 C 、不变 D 、不定3、硅二极管与锗二极管相比,一般情况,反向电流较 B ,正向压降较 A 。
A 、大 B 、小 C 、不定 D 、相等4、稳压二极管构成的稳压电路,其接法是 。
A 、稳压二极管与负载电阻串联B 、稳压二极管与负载电阻并联C 、限流调整电阻与稳压二极管串联后,负载电阻再与稳压二极管并联。
5、单相半波整流电路中,负载电阻L R 上平均电压等于 B 。
A 、0.92V B 、0.452V C 、12V6、单相桥式或全波整流电路,电容滤波后,负载电阻L R 上平均电压等于 B 。
第二章 薄板的弯曲(习题解答)2-1 写出2-1图所示矩形薄板的边界条件。
OA 为简支边,并作用有分布的弯矩M 。
BC 边为固支边,OC 边为简支边。
AB 边为自由边。
解:OA 边:M x w D y w u x w D M w x x x x x -=∂∂-=∂∂+∂∂-======0220222200)(0;OC 边:0)(00220222200=∂∂-=∂∂+∂∂-======y y y y y y wD x w u y w D M w ;BC 边:00=∂∂===ax a x xww ;AB 边:0)(2222=∂∂+∂∂-===b y by yx wu y w D M0])2([)(2333=∂∂∂-+∂∂-=∂∂+==by by yx y y x w u y w D xM Q2-2 如图2-2所示,矩形薄板OA 边和OC 边为简支边,AB 和BC 为自由边,在点B 受向下的横向集中力P 。
试证w mxy =可作为该薄板的解答,并确定常数m 、内力及边界处反力。
解:mxy w =满足平衡微分方程0/4==∇D q wOC 边上:0)(0022220=;==∂∂+∂∂-=y y x wu y w D wOA 边上:0)(0022220=;==∂∂+∂∂-=x x y wu x w D wAB 边上:0])2([0)(23332222=∂∂∂-+∂∂-=∂∂+∂∂-==by b y y x wu y w D x w u y w D ;BC 边上:0])2([0)(23332222=∂∂∂-+∂∂-=∂∂+∂∂-==ax a x y x wu x w D y w u x w D ;在B 点上:P m u D y x wu D by a x -=--=∂∂∂--==)1(2)()1(2,2)1(2u D Pm -=⇒所以)1(2u D Pxyw -=0)(2222=∂∂+∂∂-=y wu x w D M x ;0)(2222=∂∂+∂∂-=x w u y w D M y ;2)1(2P y x w u D M xy-=∂∂∂--= ;02=∇∂∂-=w xD Q x ;02=∇∂∂-=w y D Q y P R R P y x wu D R O C AA ==-=∂∂∂--=;)()1(222-3 如图2-3所示,半椭圆形薄板,直线边界为简支边,曲线边界ACB 为固支边,承受横向载荷0q=q xa 。
第三部分习题第2章1中文操作系统Windows XP一、单项选择题1.在Windows XP“开始”菜单下的“我最近的文档”菜单中存放的是【】。
A. 最近建立的文档B. 最近打开过的文件C. 最近运行过的程序D. 最近打开过的文件夹2.在Windows的“回收站”中,存放的【】。
A.只能是硬盘上被删除的文件或文件夹B.只能是软盘上被删除的文件或文件夹C.可以是硬盘或软盘上被删除的文件或文件夹D.可以是所有外存储器中被删除的文件或文件夹3.Windows 2000或Windows XP操作系统区别于DOS和Windows 3.X的最显著的特点是它【】。
A.提供了图形界面B. 能同时运行多个程序C. 具有硬件即插即用的功能D. 是真正32位的操作系统4.在Windows 中,能弹出对话框的操作是【】。
A. 选择了带省略号的菜单项B. 选择了带向右三角形箭头的菜单项C. 选择了颜色变灰的菜单项D. 运行了与对话框对应的应用程序5.在Windows 中,“任务栏”【】。
A. 只能改变位置不能改变大小B. 只能改变大小不能改变位置C. 既不能改变位置也不能改变大小D. 既能改变位置也能改变大小6.在Windows XP “资源管理器”窗口的右窗格中,若已单击了第一个文件,又按住Ctrl键并单击了第五个文件,则【】。
A. 有0个文件被选中B. 有5个文件被选中C. 有1个文件被选中D. 有2个文件被选中7.Windows具有“复制软盘”功能,复制软盘要求【】。
A. 源盘和目的盘必须规格相同B. 系统必须具有两个软盘驱动器C. 目的盘必须先经过格式化D. 目的盘上的全部内容必须先清除8.不能在Windows 的“日期和时间属性”窗口中【】。
A. 选择不同的时区B. 设置日期C. 设置时间D. 直接调整时钟的指针9.在“显示属性”窗口的【】选项卡中,可以设置显示器的分辨率。
A. 效果B. 设置C. 外观D. 屏幕保护10.下面关于Windows XP操作系统菜单命令的说法中,不正确的是【】。
教材各章习题的参考答案第二章缩聚和逐步聚合思考题3.己二酸于下列化合物反应,哪些能形成聚合物?a.乙醇b.乙二醇c.甘油d.苯酐e.己二胺 key:b c e4.写并描述下列缩聚反应所形成的聚酯结构。
b-d聚酯结构与反应物配比有无关系?答:与反应物配比有关系。
15.体形缩聚时有哪些基本条件?平均官能度如何计算?答:首先体系应是多官能度体系,即f>2.然后进一步交联,从而生成体形聚合物。
平均官能度:若等基团数,则f=∑N if i∕∑N i若两基团数不等,则f=2NAf A∕NA+NB17.简述不饱和聚酯的配方原则和固化原理。
答:不饱和聚酯是主链中含有双键的聚酯,双键可与苯乙烯共聚而交联,用来生产玻璃纤维,增强塑料。
其固化原理:其固话原理分两个阶段:一是预聚缩,制备分子量数若干的线性聚合物。
二是玻璃纤维的粘结,成型和交联固化。
配方原则:如以对苯磺酸作催化剂,可令1.2mol丙二醇,0.67mol马来酸酐,0.33mol邻苯二甲酸酐。
其中丙二醇过量可弥补挥发损失,并封锁两端。
加甲苯或二甲苯作溶剂,帮助脱水,通氮或二氧化碳以防氧化变色。
18.比较合成涤纶聚酯的两条技术及其选用原则。
说明涤纶聚合度的控制方法和分段聚合的原因。
答:酯交换法:分三步1.甲酯化:对苯二甲酸与少过量甲醇反应,的对苯二甲酸二甲酯。
2.酯交换:对苯二甲酸二甲酯与乙二醇进行酯交换反应,形成聚酯低聚物。
3.终缩聚:使聚酯低酸物自缩聚或酯交换,借减压和高温,逐步提高聚合度。
直接酯化:对苯二甲酸与过量乙二醇在200c下先酯化成低聚合度的聚对苯二甲醇酯,而后在280c下终缩聚成高聚合度的最终聚酯产品。
控制方法:间接酯化。
甲酯化和酯交换阶段,并不考虑等基团数比。
终缩聚阶段根据乙二醇的馏出量,自然调节两基团数比,逐步逼近等当量,达到预定聚合度。
间接酯化:前段预缩聚条件270c,2000-3300pa,后段缩聚条件:280-285c,60-130pa分段聚合原因:能使副产物乙二醇不断流出,是对苯二甲酸乙二醇自缩聚或酯交换,逐步提高聚合度。
微机原理第二章习题与分析解答1.单项选择题(1)8086工作最大方式时应将引脚MN/MX接()A.负电源 B.正电源 C.地 D.浮空分析:8086规定工作在最小方式下MN/MX接+5V,工作在最大方式下MN/MX 接地。
答案:C(2)8086能寻址内存储器的最大地址范围为()A.64KB分析:8086有A0~A1920条地址总线,220=1MB。
答案:B|(3)在总线周期,8086CPU与外设需交换()A.地址信息 B.数据信息 C.控制信息、B、C分析在总线周期,CPU必须发出地址信息的控制信息以后,才能实现与外设进行交换数据。
答案:D(4)8086用哪种引脚信号来确定是访问内存还是访问外设()A.RD IO分析:引脚信号M/IO是Memory or Input Output的缩写,当M/IO=0时,用以访问外设;当M/IO=1,用以访问外设。
答案:C(5)在8086指令系统中,下列哪种寻址方式不能表示存储器操作数()A.基址变址寻址B.寄存器寻址C.直接寻址 D.寄存器间接寻址"分析:8086指令系统共有七种寻址方式,只有立即寻址方式和寄存器寻址方式不是表示存储器操作数的。
答案:B(6)当CPU时钟频率为5MHz,则其总线周期()A.0.8 s μs分析:时钟周期T=1/ƒ=200ns,而一个总路线周期通常由4个T状态组成,有4╳T=4╳200ns=μs.答案:A(7)8086工作在最大方式下,总路线控制器使用芯片()A.8282 B.8286分析:在最大方式下,系统中主要控制信号是由总路线控制器产生,而只有芯片8288才有这方面的功能。
答案:D…(8)取指令物理地址=()A.(DS)╳10H+偏移地址 B.(ES)╳10H+偏移地址C.(SS)╳10H+(SP) D.(CS)╳10H+(IP)分析:每当8086CPU取指令时,总是根据CS:IP的所指的存贮单元去取指答案:D(9)一个数据的有效地址是2140H、(DS)=1016H,则该数据所在内存单元的物理地址为()A.12300H分析:存贮器操作数的物理地址计算方法为:(DS)╳10H+有效地址,即1016H ╳10H+2140H=122A0H答案:B(10)在8086中用一个总路线周期访问内存,最多能读/写()字节。
第2章进程管理“练习与思考”解答1.基本概念和术语进程、进程互斥、进程同步、临界资源、临界区、死锁进程是程序在并发环境中的执行过程。
进程互斥:各个进程彼此不知道对方的存在,逻辑上没有关系,由于竞争同一资源(如打印机、文件等)而发生相互制约。
进程同步:各个进程不知对方的名字,但通过对某些对象(如I/O缓冲区)的共同存取来协同完成一项任务。
临界资源:一次仅允许一个进程使用的资源。
临界区:在每个进程中访问临界资源的那段程序。
死锁是指在一个进程集合中的每个进程都在等待仅由该集合中的另一个进程才能引发的事件而无限期地僵持下去的局面。
2.基本原理和技术(1)在操作系统中为什么要引入进程概念它与程序的区别和联系是什么在操作系统中,由于多道程序并发执行时共享系统资源,共同决定这些资源的状态,因此系统中各程序在执行过程中就出现了相互制约的新关系,程序的执行出现“走走停停”的新状态。
这些都是在程序的动态过程中发生的。
用程序这个静态概念已不能如实反映程序并发执行过程中的这些特征。
为此,人们引入“进程”这一概念来描述程序动态执行过程的性质。
进程与程序的主要区别是:·进程是动态的;程序是静态的。
·进程有独立性,能并发执行;程序不能并发执行。
·二者无一一对应关系。
·进程异步运行,会相互制约;程序不具备此特征。
但进程与程序又有密切的联系:进程不能脱离具体程序而虚设,程序规定了相应进程所要完成的动作。
(2)进程的基本状态有哪几种通常在操作系统中,进程至少要有三种基本状态。
这三种基本状态是:运行态、就绪态和阻塞态(或等待态)。
(3)用如图3-23所示的进程状态转换图能够说明有关处理机管理的大量内容。
试回答:① 什么事件引起每次显著的状态变迁② 下述状态变迁因果关系能否发生为什么(A)2→1 (B)3→2 (C)4→1①图3-23 进程状态转换图就绪→运行:CPU空闲,就绪态进程被调度程序选中。
运行→就绪:正在运行的进程用完了本次分配给它的CPU时间片。
运行→阻塞:运行态进程因某种条件未满足而放弃对CPU的占用,如等待读文件。
阻塞→就绪:阻塞态进程所等待的事件发生了,例如读数据的操作完成。
②下述状态变迁:(A)2→1:可以。
运行进程用完了本次分配给它的时间片,让出CPU,从就绪队列中选一个进程投入运行。
(B)3→2:不可以。
任何时候一个进程只能处于一种状态,它既然由运行态变为阻塞态,就不能再变为就绪态。
(C)4→1:可以。
某一阻塞态进程等待的事件出现了,而且此时就绪队列为空,该进程进入就绪队列后马上又被调度运行。
(4)P CB的作用是什么它是怎样描述进程的动态性质的进程控制块PCB是进程组成中最关键的部分。
每个进程有唯一的进程控制块;操作系统根据PCB对进程实施控制和管理,进程的动态、并发等特征是利用PCB表现出来的;PCB是进程存在的唯一标志。
PCB中有表明进程状态的信息:该进程的状态是运行态、就绪态还是阻塞态,利用状态信息来描述进程的动态性质。
(5)PCB表的组织方式主要有哪几种分别简要说明。
PCB表的组织方式主要有:线性方式、链接方式和索引方式。
线性方式是把所有进程的PCB都放在一个表中。
链接方式按照进程的不同状态把它们分别放在不同的队列中。
索引方式是利用索引表记载相应状态进程的PCB地址。
(6)进程进入临界区的调度原则是什么一个进程进入临界区的调度原则是:①如果有若干进程要求进入空闲的临界区,一次仅允许一个进程进入。
②任何时候,处于临界区内的进程不可多于一个。
如已有进程进入自己的临界区,则其它所有试图进入临界区的进程必须等待。
③进入临界区的进程要在有限时间内退出,以便其它进程能及时进入自己的临界区。
④如果进程不能进入自己的临界区,则应让出CPU,避免进程出现“忙等”现象。
(7)简述信号量的定义和作用。
P、V操作原语是如何定义的信号量一般是由两个成员组成的数据结构,其中一个成员是整型变量,表示该信号量的值,它是与相应资源的使用情况有关的;另一个是指向PCB的指针。
当多个进程都等待同一信号量时,它们就排成一个队列,由信号量的指针项指出该队列的头。
信号量通常可以简单反映出相应资源的使用情况,它与P、V操作原语一起使用可实现进程的同步和互斥。
P、V操作原语的定义:P(S):顺序执行下述两个动作:①信号量的值减1,即S=S-1;②如果S≥0,则该进程继续执行;如果S<0,则把该进程的状态置为阻塞态,把相应的PCB连入该信号量队列的末尾,并放弃处理机,进行等待(直至其它进程在S上执行V操作,把它释放出来为止)。
V(S):顺序执行下述两个动作:①S值加1,即S=S+1;②如果S>0,则该进程继续运行;如果S≤0,则释放信号量队列上的第一个PCB(即信号量指针项所指向的PCB)所对应的进程(把阻塞态改为就绪态),执行V操作的进程继续运行。
(8)计算机系统中产生死锁的根本原因是什么计算机系统中产生死锁的根本原因是:资源有限且操作不当。
此外,进程推进顺序不合适也可以引发的死锁。
(9)发生死锁的四个必要条件是什么发生死锁的四个必要条件是:互斥条件,不可抢占条件,占有且申请条件,循环等待条件。
(10)一般解决死锁的方法有哪三种一般解决死锁的方法有:死锁的预防、死锁的避免、死锁的检测与恢复。
3.思考题(1)是否所有的共享资源都是临界资源为什么不是所有的共享资源都是临界资源。
因为临界资源是一次仅允许一个进程使用的资源,而系统中有很多资源可以让多个进程同时使用,例如硬盘、正文段等。
(2)系统中只有一台打印机,有三个用户的程序在执行过程中都要使用打印机输出计算结果。
设每个用户程序对应一个进程。
问:这三个进程间有什么样的制约关系试用P、V操作写出这些进程使用打印机的算法。
因为打印机是一种临界资源,所以这三个进程只能互斥使用这台打印机,即一个用户的计算结果打印完之后,另一个用户再打印。
设三个进程分别为A、B和C。
设一个互斥信号量mutex,其初值为1。
进程A 进程B 进程CP(mutex) P(mutex) P(mutex)使用打印机使用打印机使用打印机 V(mutex) V(mutex) V(mutex)(3)判断下列同步问题的算法是否正确若有错,请指出错误原因并予以改正。
① 设A,B两个进程共用一个缓冲区Q,A向Q写入信息,B从Q读出信息,算法框图如图3-24所示。
② 设A,B为两个并发进程,它们共享一个临界资源。
其运行临界区的算法框图如图3-25所示。
图3-24 进程A, B的算法框图图3-25 两个并发进程临界区的算法框图①这个算法不对。
因为A、B两个进程共用一个缓冲区Q,如果A先运行,且信息数量足够多,那么缓冲区Q中的信息就会发生后面的冲掉前面的,造成信息丢失,B就不能从Q中读出完整的信息。
改正:A、B两进程要同步使用缓冲区Q。
为此,设立两个信号量:empty表示缓冲区Q为空,初值为1;full表示缓冲区Q为满,初值为0。
算法框图如图1所示。
②这个算法不对。
因为A、B两个进程是并发的,它们共享一个临界资源,所以二者应互斥地使用该临界资源,在进入临界区时不存在先A后B的时序关系,而是哪个进程先到一步就先进入自己的临界区。
改正:A、B两个进程应互斥地进入临界区。
为此,设立一个信号量:互斥信号量mutex,其初值为1。
算法框图如图2所示。
A进程 B进程 A进程 B进程CSbV(mutex)图1 图 2(4)设有一台计算机,有两条I/O通道,分别接一台卡片输入机和一台打印机。
卡片机把一叠卡片逐一输入到缓冲区B1中,加工处理后再搬到缓冲区B2中,并在打印机上打印结果。
问:① 系统要设几个进程来完成这个任务各自的工作是什么② 这些进程间有什么样的相互制约关系③用P、V操作写出这些进程的同步算法。
①系统可设三个进程来完成这个任务:R进程负责从卡片输入机上读入卡片信息,输入到缓冲区B1中;C进程负责从缓冲区B1中取出信息,进行加工处理,之后将结果送到缓冲区B2中;P进程负责从缓冲区B2中取出信息,并在打印机上印出。
②R进程受C进程影响,B1放满信息后R进程要等待——等C进程将其中信息全部取走,才能继续读入信息;C进程受R进程和P进程的约束:B1中信息放满后C进程才可从中取出它们,且B2被取空后,C进程才可将加工结果送入其中;P进程受C进程的约束:B2中信息放满后P进程才可从中取出它们,进行打印。
③信号量含义及初值:B1full——缓冲区B1满,初值为0;B1empty——缓冲区B1空,初值为0;B2full——缓冲区B2满,初值为0;B2empty——缓冲区B2空,初值为0;R进程 C进程 P进程输入信息写入缓冲区B1 P(B1full) P(B2full) V(B1full) 从B1中取出信息从B2中取出信息进行打印P(B1empty) 加工信息 V(B2empty)结果送入B2 V(B1empty)V(B2full)P(B2empty)(5)设有无穷多个信息,输入进程把信息逐个写入缓冲区,输出进程逐个从缓冲区中取出信息。
针对下述两种情况:① 缓冲区是环形的,最多可容纳n个信息;② 缓冲区是无穷大的。
试分别回答下列问题:① 输入、输出两组进程读/写缓冲区需要什么条件② 用P、V操作写出输入、输出两组进程的同步算法,并给出信号量含义及初值。
①针对容量为n的环形缓冲区,输入、输出两组进程读/写缓冲区需要的条件为:输入进程和输出进程需同步执行,即输入进程写缓冲区后,输出进程才可以读;由于缓冲区容量有限,因此任一时刻所有输入进程存放信息的单元数不能超过缓冲区的总容量(n);同理,所有输出进程取出信息的总量不能超过所有输入进程当前写入信息的总数。
设缓冲区的编号为0~n-1,in和out分别是输入进程和输出进程使用的指针,指向下面可用的缓冲区,初值都是0。
为使两类进程实行同步操作,应设置三个信号量:两个计数信号量full和empty,一个互斥信号量mutex。
full:表示放有信息的缓冲区数,其初值为0。
empty:表示可供使用的缓冲区数,其初值为n。
mutex:互斥信号量,初值为1,表示各进程互斥进入临界区,保证任何时候只有一个进程使用缓冲区。
下面是解决这个问题的算法描述。
输入进程Input:while (TRUE) {P(empty);P(mutex);信息送往buffer(in);in=(in+1)mod N; /*以N为模*/V(mutex);V(full);}输出进程Output:while (TRUE){P(full);P(mutex);从buffer(out)中取出信息;out=(out+1)mod N; /*以N为模*/V(mutex);V(empty);}②当缓冲区是无穷大时,输入进程存放信息的单元数不再受缓冲区总容量的限制,因此,可以不设信号量empty。