数值分析第三章 解线性方程组的迭代法34页
- 格式:ppt
- 大小:440.50 KB
- 文档页数:34
数值分析第三章线性方程组迭代法线性方程组是数值分析中的重要问题之一,涉及求解线性方程组的迭代法也是该领域的研究重点之一、本文将对线性方程组迭代法进行深入探讨。
线性方程组的一般形式为AX=b,其中A是一个n×n的系数矩阵,x和b是n维向量。
许多实际问题,如电路分析、结构力学、物理模拟等,都可以归结为求解线性方程组的问题。
然而,当n很大时,直接求解线性方程组的方法计算量很大,效率低下。
因此,我们需要寻找一种更高效的方法来求解线性方程组。
线性方程组迭代法是一种基于迭代思想的求解线性方程组的方法。
其基本思想是通过构造一个序列{xn},使得序列中的每一项都逼近解向量x。
通过不断迭代,可以最终得到解向量x的一个近似解。
常用的线性方程组迭代法有雅可比迭代法、高斯-赛德尔迭代法和逐次超松弛迭代法等。
雅可比迭代法是其中的一种较为简单的迭代法。
其基本思想是通过分解系数矩阵A,将线性方程组AX=b转化为x=Tx+c的形式,其中T是一个与A有关的矩阵,c是一个常向量。
然后,通过不断迭代,生成序列xn,并使序列中的每一项都逼近解向量x。
高斯-赛德尔迭代法是雅可比迭代法的改进方法。
其核心思想是利用当前迭代步骤中已经求得的近似解向量的信息。
具体而言,每次迭代时,将前一次迭代得到的近似解向量中已经计算过的分量纳入计算,以加速收敛速度。
相比于雅可比迭代法,高斯-赛德尔迭代法的收敛速度更快。
逐次超松弛迭代法是高斯-赛德尔迭代法的改进方法。
其核心思想在于通过引入一个松弛因子ω,将高斯-赛德尔迭代法中的每次迭代变为x[k+1]=x[k]+ω(d[k+1]-x[k])的形式,其中d[k+1]是每次迭代计算得到的近似解向量的一个更新。
逐次超松弛迭代法可以根据问题的特点调整松弛因子的值,以获得更好的收敛性。
除了以上提到的三种迭代法,还有一些其他的线性方程组迭代法,如SOR迭代法、共轭梯度法等。
这些方法都具有不同的特点和适用范围,可以根据问题的具体情况选择合适的迭代法。

25数值分析—插 值─基于Matlab 的实现与分析§4 多项式函数与函数的最佳逼近§4.1 插值 (Interpolation) §4.1.1 问题的提出在工程地质测量、机械设计及其制造、信号分析等实践中,经常回遇到曲线的描绘或函数的确定问题,平面上的曲线方程可写成如下的形式()x f y =(1)一般情况下,人们能够知道的或者说能够得到的只是曲线上的若干点,如通过测量可以得到曲线上()n i y x i i ,,1,0, =(2)的1+n 个点,由于信息不全,这1+n 个点不足以确定其所在的曲线,因而人们退一步地希望在充分利用这些数据的前提下,确定一条“简单的”且与未知曲线“最接近”的曲线;此外,在科学研究和计算中,往往回遇到复杂函数的分析与计算,有时用简单的函数来代替,可能会去掉不必要的麻烦而使问题比较容易地得到解决。
只需对自变量做加、减法和乘法运算就能得到函数值是多项式函数显著的特点之一,因此,从计算的角度来说多项式函26数是最简单的,因此,在函数最佳逼近方面,“简单的函数(曲线)”指的就是多项式函数(类);所谓“最接近”或者严格地说最佳逼近,就是从指定的一类简单的函数中寻找一个和给定的函数“最贴近”的函数,从几何(空间)的角度看,函数最佳逼近就是从指定的一类简单的函数(点的集合)中寻找一个和给定的函数(定点)之间距离最短的函数(点)。
函数空间中不同的距离度量确定了不同的逼近准则,不同的逼近准则定义了不同的函数最佳逼近。
在插值问题中,最佳逼近准则是:在已知的全部点处,简单函数(被插值多项式)的函数值与未知函数的函数值相等,即()k k y x P =n k ,,2,1,0 = (3)§4.1.2 关于插值问题的基本定理定理:给定1+n 个曲线上点()n i y x ii,,1,0,, =,如果i x ,ni ,,1,0 =互不相同,那么,在所有次数不超过n 次的多项式函数中,存在唯一的多项式函数()x P n,满足条件(3)。
数值分析课程实验报告实验名称 线性方程组的迭代解法Ax b =的系数矩阵对角线元素容许误差。
雅可比(Jacobi )迭代法解方程组的算法描述如下:任取初始向量(0)(0)1(xx =1+,并且 1,2,...,n ,计算 11(ni j ii j ib a a =≠-∑()k x ,结束;否则执行④,则不收敛,终止程序;否则转② 迭代法的算法描述)迭代法中,如果当新的分量求出后,马上用它来代替旧的分量,则可能会更快地接近方程组的准确解。
基于这种设想构造的迭代公式,n ,k = (2)算法可相应地从雅可比(Jacobi )迭代法改造得到(Gauss-Seidel)迭代得到的值进一()()()1((1k i ii k k i i x b a x x ωω==+-1,2,,n ,2,k =(3)为松弛因子(显然当1ω=塞德尔迭代公式) ()k ix 通常优于旧值(1)k ix -,在将两者加工成松弛值时,自然要求松弛因子1ω>,以尽量发挥新值的优势,这类迭代就称为逐次超松弛迭代法。
SOR 迭代的关键在于选取合适的松弛因子,松弛因子的取值对收敛速度影响很大,但如何选取最佳松弛因子的问题,至今仍未有效解决,在实际计算时,通常依据系数矩阵的特点,并结合以往的经验选取合适的松弛因子。
练习与思考题分析解答(0)(1,1,1,1)x =[ -0.999976, -0.999976, -0.999976, -0.999976]x =[ -0.99999, -0.999991, -0.999992, -0.999993]x =塞德尔迭代算法的收敛速度要比雅可比迭代算法的收敛速度快SOR 迭代实质上是高斯原理和基本方法相同。
如果选择合适的松弛因子,它能够加快收敛速度。
SOR 迭代算法更加普通,当选取一个合适的松弛因子后收敛速度明显加快。
迭代算法将前一步的结果[ -0.99999, -0.999991, -0.999992, -0.999993]x =[ -0.999992, -0.999993, -0.999994, -0.999995]x =[ -0.999993, -0.999994, -0.999995, -0.999995]x =[ -0.999992, -0.999993, -0.999994, -0.999995]x =[ -0.999999, -1.0, -1.0, -1.0]x =[ -0.999999, -1.0, -1.0, -1.0]x =因为为了保证迭代过程收敛,松弛因子1.3左右。
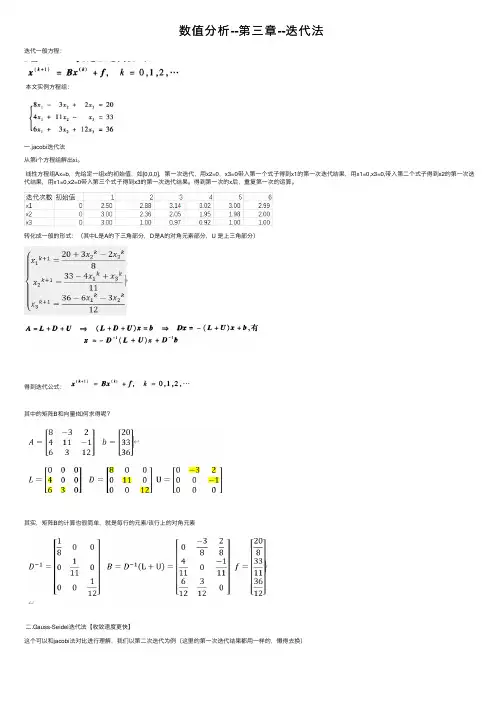
数值分析--第三章--迭代法迭代⼀般⽅程:本⽂实例⽅程组:⼀.jacobi迭代法从第i个⽅程组解出xi。
线性⽅程组Ax=b,先给定⼀组x的初始值,如[0,0,0],第⼀次迭代,⽤x2=0,x3=0带⼊第⼀个式⼦得到x1的第⼀次迭代结果,⽤x1=0,x3=0,带⼊第⼆个式⼦得到x2的第⼀次迭代结果,⽤x1=0,x2=0带⼊第三个式⼦得到x3的第⼀次迭代结果。
得到第⼀次的x后,重复第⼀次的运算。
转化成⼀般的形式:(其中L是A的下三⾓部分,D是A的对⾓元素部分,U 是上三⾓部分)得到迭代公式:其中的矩阵B和向量f如何求得呢?其实,矩阵B的计算也很简单,就是每⾏的元素/该⾏上的对⾓元素⼆.Gauss-Seidel迭代法【收敛速度更快】这个可以和jacobi法对⽐进⾏理解,我们以第⼆次迭代为例(这⾥的第⼀次迭代结果都⽤⼀样的,懒得去换)从上表对⽐结果可以看出,Jacobi⽅法的第⼆次迭代的时候,都是从第⼀次迭代结果中,获取输⼊值。
上⼀次迭代结果[2.5,3.0,3.0],将这个结果带⼊上⾯式⼦1,得到x1=2.88,;将[2.5,3.0,3.0]替换成[2.88,3.0,3.0]带⼊第⼆个式⼦的运算,这⾥得到x2=1.95,所以把[2.88,3.0,3.0]替换成[2.88,1.95,3.0]输⼊第三个式⼦计算X3=1.0.这就完成了这⼀次的迭代,得到迭代结果[2.88,1.95,1.0],基于这个结果,开始下⼀次迭代。
特点:jacobi迭代法,需要存储,上⼀次的迭代结果,也要存储这⼀次的迭代结果,所以需要两组存储单元。
⽽Gauss-Seidel迭代法,每⼀次迭代得到的每⼀个式⼦得到的值,替换上⼀次迭代结果中的值即可。
所以只需要⼀组存储单元。
转化成⼀般式:注意:第⼆个式⼦中的是k+1次迭代的第⼀个式⼦的值,不是第k次迭代得值。
计算过程同jacobi迭代法的类似三.逐次超松弛法SOR法上⾯仅仅通过实例说明,Jacobi和Seidel迭代的运算过程。
1 / 8数值分析实验六:解线性方程组的迭代法2016113 张威震1 病态线性方程组的求解1.1 问题描述理论的分析表明,求解病态的线性方程组是困难的。
实际情况是否如此,会出现怎样的现象呢?实验内容:考虑方程组Hx=b 的求解,其中系数矩阵H 为Hilbert 矩阵,,,1(),,,1,2,,1i j n n i j H h h i j n i j ⨯===+-这是一个著名的病态问题。
通过首先给定解(例如取为各个分量均为1)再计算出右端b 的办法给出确定的问题。
实验要求:(1)选择问题的维数为6,分别用Gauss 消去法、列主元Gauss 消去法、J 迭代法、GS 迭代法和SOR 迭代法求解方程组,其各自的结果如何?将计算结果与问题的解比较,结论如何?(2)逐步增大问题的维数(至少到100),仍然用上述的方法来解它们,计算的结果如何?计算的结果说明了什么?(3)讨论病态问题求解的算法1.2 算法设计首先编写各种求解方法的函数,Gauss 消去法和列主元高斯消去法使用实验5中编写的函数myGauss.m 即可,Jacobi 迭代法函数文件为myJacobi.m ,GS 迭代法函数文件为myGS.m ,SOR 方法的函数文件为mySOR.m 。
1.3 实验结果1.3.1 不同迭代法球求解方程组的结果比较选择H 为6*6方阵,方程组的精确解为x* = (1, 1, 1, 1, 1, 1)T ,然后用矩阵乘法计算得到b ,再使用Gauss 顺序消去法、Gauss 列主元消去法、Jacobi 迭代法、G-S 迭代法和SOR 方法分别计算得到数值解x1、x2、x3、x4,并计算出各数值解与精确解之间的无穷范数。
Matlab 脚本文件为Experiment6_1.m 。
迭代法的初始解x 0 = (0, 0, 0, 0, 0, 0)T ,收敛准则为||x(k+1)-x(k)||∞<eps=1e-6,SOR方法的松弛因子选择为w=1.3,计算结果如表1。

第3章 解线性方程组的迭代法§1 Jacobi 迭代法和Gauss-Seidel 迭代法(I )迭代概念(1) A x b = , n n A R ⨯∈, nb R ∈A M N =- , n n M R ⨯∈ , n n N R ⨯∈ ,M 非奇异M x N x b-= Mx Nx b =+11x M Nx M b --=+如果令 11,B M N f M b --==,那么上式写成(2) x B x f =+ 此方程组等价于A x b= 任给(0)n xR ∈,(1)(0)x B x f =+(2)(1)xB x f =+(3) (1)()k k xBx f +=+由(3)可以确定{}()k x ,当()*k n xx R →∈,即()*0k x x -→ 时,有**x Bx f =+*x 同样满足 *Ax b =定义 式(3) (1)()k k xBx f +=+称为求解 (1)Ax b = 的简单形式迭代法,B 称为迭代矩阵。
(II )Jacobi 迭代法Ax b =写成分量形式有1,1,2,,nij ji j a xb i n ===∑111,1,2,,i nii i ij j ijji j j i a x a x a xb i n -==+++==∑∑假定 0ii a ≠ ,那么有1111(),1,2,,i ni i ij j ij j j j i ii x b a x a x i n a -==+=--=∑∑迭代法为任给 (0)(0)(0)(0)12(,,,)T n n x x x x R =∈1(1)()()111(),1,2,,;0,1,i nk k k ii ij j ij j j j i ii xb a x a x i n k a -+==+=--==∑∑即:{}{}{}(1)()()()11122133111(1)()()()22211233222(1)()()()1122,111(1(1(k k k k n n k k k k n n k k k k n n n n n n n nnx b a x a x a x a x b a x a x a x a x b a x a x a x a +++--⎧=----⎪⎪⎪=----⎪⎨⎪⎪⎪=----⎪⎩上式迭代方法称为Jacobi 迭代 例1.1用Jacobi 迭代法解方程组123123123522142241x x x x x x x x x +-=⎧⎪++=⎨⎪-+=-⎩解 Jacobi 迭代方法为(1)()()()()123231(122)0.20.40.45k k k k k x x x x x +=-+=-+ (1)()()()()213131(2)0.50.250.254k k k k k x x x x x +=--=-- (1)()()()()312121(12)0.250.250.54k k k k k x x x x x +=--+=--+取 (0)3(0,0,0)T xR =∈()()()123000010.20.50.2520.10.51250.05110.0000080.4998820.000039120.0000340.4999880.000025130.0000150.5000020.000003k k k k x x x ------方程组 Ax b =的准确解为*3(0,0.5,0)Tx R =∈。