数值分析方法第三章
- 格式:ppt
- 大小:1.79 MB
- 文档页数:10
数值分析第三章线性方程组解法在数值分析中,线性方程组解法是一个重要的主题。
线性方程组是由一组线性方程组成的方程组,其中未知数的次数只为一次。
线性方程组的解法包括直接解法和迭代解法两种方法。
一、直接解法1.1矩阵消元法矩阵消元法是求解线性方程组的一种常用方法。
这种方法将方程组转化为上三角矩阵,然后通过回代求解得到方程组的解。
1.2LU分解法LU分解法是将系数矩阵A分解为一个下三角矩阵L和一个上三角矩阵U的乘积,然后通过解两个三角方程组求解线性方程组。
这种方法可以减少计算量,提高计算效率。
1.3 Cholesky分解法Cholesky分解法是对称正定矩阵进行分解的一种方法。
它将系数矩阵A分解为一个下三角矩阵L和它的转置的乘积,然后通过解两个三角方程组求解线性方程组。
Cholesky分解法适用于对称正定矩阵的求解,具有较高的精度和稳定性。
二、迭代解法2.1 Jacobi迭代法Jacobi迭代法是一种迭代求解线性方程组的方法。
它通过分解系数矩阵A为一个对角矩阵D和一个余项矩阵R,然后通过迭代更新未知数的值,直至达到一定精度要求为止。
Jacobi迭代法简单易懂,容易实现,但收敛速度较慢。
2.2 Gauss-Seidel迭代法Gauss-Seidel迭代法是一种改进的Jacobi迭代法。
它通过使用新计算出的未知数值代替旧的未知数值,达到加快收敛速度的目的。
Gauss-Seidel迭代法是一种逐步逼近法,每次更新的未知数值都会被用于下一次的计算,因此收敛速度较快。
2.3SOR迭代法SOR迭代法是一种相对于Jacobi和Gauss-Seidel迭代法更加快速的方法。
它引入了一个松弛因子,可以根据迭代的结果动态地调整未知数的值。
SOR迭代法在理论上可以收敛到线性方程组的解,而且收敛速度相对较快。
三、总结线性方程组解法是数值分析中的一个重要内容。
直接解法包括矩阵消元法、LU分解法和Cholesky分解法,可以得到线性方程组的精确解。
数值分析第三章线性方程组迭代法线性方程组是数值分析中的重要问题之一,涉及求解线性方程组的迭代法也是该领域的研究重点之一、本文将对线性方程组迭代法进行深入探讨。
线性方程组的一般形式为AX=b,其中A是一个n×n的系数矩阵,x和b是n维向量。
许多实际问题,如电路分析、结构力学、物理模拟等,都可以归结为求解线性方程组的问题。
然而,当n很大时,直接求解线性方程组的方法计算量很大,效率低下。
因此,我们需要寻找一种更高效的方法来求解线性方程组。
线性方程组迭代法是一种基于迭代思想的求解线性方程组的方法。
其基本思想是通过构造一个序列{xn},使得序列中的每一项都逼近解向量x。
通过不断迭代,可以最终得到解向量x的一个近似解。
常用的线性方程组迭代法有雅可比迭代法、高斯-赛德尔迭代法和逐次超松弛迭代法等。
雅可比迭代法是其中的一种较为简单的迭代法。
其基本思想是通过分解系数矩阵A,将线性方程组AX=b转化为x=Tx+c的形式,其中T是一个与A有关的矩阵,c是一个常向量。
然后,通过不断迭代,生成序列xn,并使序列中的每一项都逼近解向量x。
高斯-赛德尔迭代法是雅可比迭代法的改进方法。
其核心思想是利用当前迭代步骤中已经求得的近似解向量的信息。
具体而言,每次迭代时,将前一次迭代得到的近似解向量中已经计算过的分量纳入计算,以加速收敛速度。
相比于雅可比迭代法,高斯-赛德尔迭代法的收敛速度更快。
逐次超松弛迭代法是高斯-赛德尔迭代法的改进方法。
其核心思想在于通过引入一个松弛因子ω,将高斯-赛德尔迭代法中的每次迭代变为x[k+1]=x[k]+ω(d[k+1]-x[k])的形式,其中d[k+1]是每次迭代计算得到的近似解向量的一个更新。
逐次超松弛迭代法可以根据问题的特点调整松弛因子的值,以获得更好的收敛性。
除了以上提到的三种迭代法,还有一些其他的线性方程组迭代法,如SOR迭代法、共轭梯度法等。
这些方法都具有不同的特点和适用范围,可以根据问题的具体情况选择合适的迭代法。
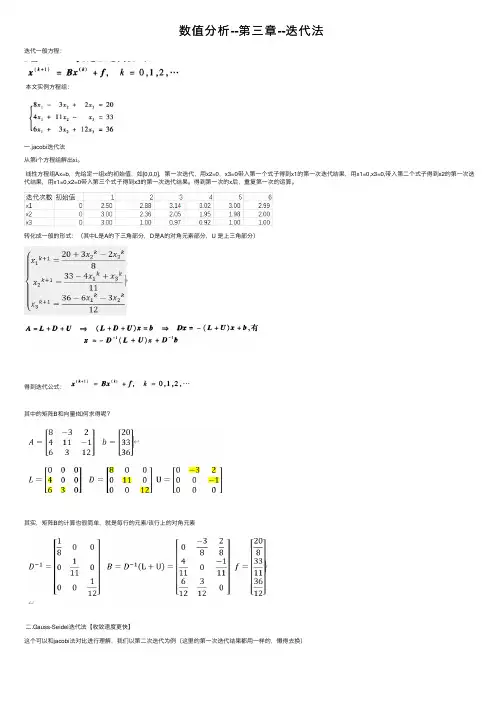
数值分析--第三章--迭代法迭代⼀般⽅程:本⽂实例⽅程组:⼀.jacobi迭代法从第i个⽅程组解出xi。
线性⽅程组Ax=b,先给定⼀组x的初始值,如[0,0,0],第⼀次迭代,⽤x2=0,x3=0带⼊第⼀个式⼦得到x1的第⼀次迭代结果,⽤x1=0,x3=0,带⼊第⼆个式⼦得到x2的第⼀次迭代结果,⽤x1=0,x2=0带⼊第三个式⼦得到x3的第⼀次迭代结果。
得到第⼀次的x后,重复第⼀次的运算。
转化成⼀般的形式:(其中L是A的下三⾓部分,D是A的对⾓元素部分,U 是上三⾓部分)得到迭代公式:其中的矩阵B和向量f如何求得呢?其实,矩阵B的计算也很简单,就是每⾏的元素/该⾏上的对⾓元素⼆.Gauss-Seidel迭代法【收敛速度更快】这个可以和jacobi法对⽐进⾏理解,我们以第⼆次迭代为例(这⾥的第⼀次迭代结果都⽤⼀样的,懒得去换)从上表对⽐结果可以看出,Jacobi⽅法的第⼆次迭代的时候,都是从第⼀次迭代结果中,获取输⼊值。
上⼀次迭代结果[2.5,3.0,3.0],将这个结果带⼊上⾯式⼦1,得到x1=2.88,;将[2.5,3.0,3.0]替换成[2.88,3.0,3.0]带⼊第⼆个式⼦的运算,这⾥得到x2=1.95,所以把[2.88,3.0,3.0]替换成[2.88,1.95,3.0]输⼊第三个式⼦计算X3=1.0.这就完成了这⼀次的迭代,得到迭代结果[2.88,1.95,1.0],基于这个结果,开始下⼀次迭代。
特点:jacobi迭代法,需要存储,上⼀次的迭代结果,也要存储这⼀次的迭代结果,所以需要两组存储单元。
⽽Gauss-Seidel迭代法,每⼀次迭代得到的每⼀个式⼦得到的值,替换上⼀次迭代结果中的值即可。
所以只需要⼀组存储单元。
转化成⼀般式:注意:第⼆个式⼦中的是k+1次迭代的第⼀个式⼦的值,不是第k次迭代得值。
计算过程同jacobi迭代法的类似三.逐次超松弛法SOR法上⾯仅仅通过实例说明,Jacobi和Seidel迭代的运算过程。
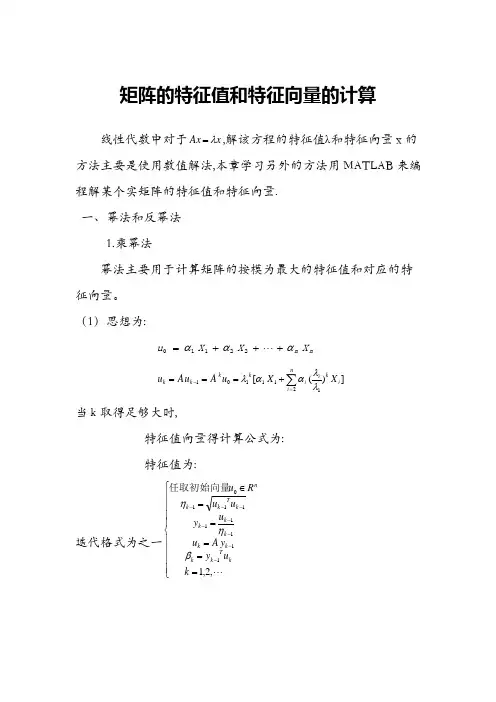
矩阵的特征值和特征向量的计算线性代数中对于x Ax λ=,解该方程的特征值λ和特征向量x 的方法主要是使用数值解法,本章学习另外的方法用MATLAB 来编程解某个实矩阵的特征值和特征向量. 一、幂法和反幂法 1.乘幂法幂法主要用于计算矩阵的按模为最大的特征值和对应的特征向量。
(1)思想为: n n X X X u ααα+++= 22110])([2111101∑=-+===ni i ki i kkk k X X u A u A u λλααλ当k 取得足够大时,特征值向量得计算公式为: 特征值为:迭代格式为之一⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧=====∈-------- ,2,1111111110k u y y A u uy u u R u k Tk k k k k k k k Tk k n βηη任取初始向量迭代格式之二⎪⎪⎪⎪⎪⎪⎪⎩⎪⎪⎪⎪⎪⎪⎪⎨⎧=======------≤≤- ,2,1)sgn(),,,(max ),,,(任取初始向量)()1()()(2)(11)1(11)1(1)1()0()0(2)0(10k h h h h h y A u h u y h h h h h u k r k r k Tk n k k k k k r k k k j nj k r Tn β两种迭代格式相比较, 格式一编程容易, 迭代一次所需时间也短, 迭代格式二迭代时间长, 但它在计算过程中舍入误差的影响较格式一小。
幂法的缺点是如果矩阵A 的特征根有重根时不能用。
2、反幂法目的同乘幂法, 用于计算矩阵的按模为最大的特征值和对应的特征向量。
反幂法的迭代格式为⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧=====∈-------- ,2,1任取初始向量111111110k u y y A u uy u u R u k T k k k k k k k k Tk k n βηη3.带原点位移的反幂法迭代格式为 ,2,1)max(11=⎪⎪⎩⎪⎪⎨⎧===--k m y u y m u A y k kkk k k k三、Jacobi 方法和QR 方法Jacobi 方法主要用于求实对称矩阵的全部特征值和特征向量的一种方法,所以个人觉得雅克比法更为现实更为有用。

第三章矩阵特征值与特征向量的计算--------学习小结一、本章学习体会本章我们学习了矩阵特征值与特征向量的计算方法即幂法、反幂法、Jacobi方法和QR方法。
下边介绍一下四种方法各自的特点和适用范围。
幂法:主要用于计算矩阵按模最大的特征值及其相应的特征向量;反幂法:主要用于计算矩阵按模最小的特征值及其相应的特征向量;Jacobi法:用于求实对称矩阵的全部特征值和特征向量的方法;QR法:则适用于计算一般实矩阵的全部特征值,尤其适用于计算中小型实矩阵的全部特征值。
归结起来,这四种方法有一个共同的特点,即都是用了迭代的方法来求矩阵的特征值和特征向量。
还有利用用MATLAB自带的解法求解特征值和特征向量,其自带函数Eig即得到结果是虚数也可以算出,并且结果自动正交化。
二、本章知识梳理在工程技术中,计算矩阵的特征值和特征向量主要使用数值解法。
本章将阐述幂法、反幂法、Jacobi 方法、和QR 方法,并且只限于讨论实矩阵的情况。
3.1 幂法和反幂法(1)幂法幂法主要用于计算矩阵的按模为最大的特征值和相应的特征向量,其思想是迭代。
设n ⨯n 实矩阵A 具有n 个线性无关的特征向量,,...,,321n x x x x 其相应的特征值n λλλ...21,,满足如下不等式 n λλλλ≥≥≥> (321)其中i i i x Ax λ= )。
(n i ,...2,1=现在要求出1λ和相应的特征向量。
任取一n 维非零向量0u ,从0u 出发,按照如下的递推公式 1-=k k Au u ),,(...21=k 因n 维向量组n x x x ,...,21线性无关,故对于向量0u ,必存在唯一的不全为零的数组n ααα,...,21,使得n n x x x u ααα...22110++=n k n k k k k k k x A x A x A u A u A Au u ααα+++=====--......22110221=⎥⎥⎦⎤⎢⎢⎣⎡⎪⎪⎭⎫ ⎝⎛++⎪⎪⎭⎫ ⎝⎛+=+++n kn n k kn k n n k k x x x x x x 12122111222111......λλαλλααλλαλαλα 设01≠α。
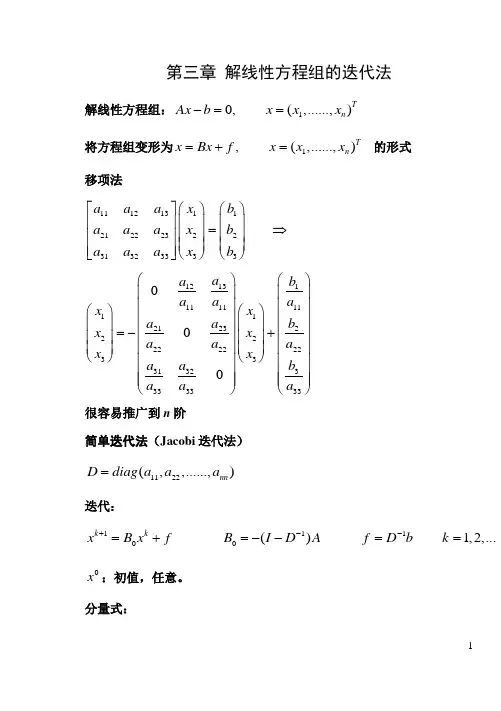
第三章 解线性方程组的迭代法解线性方程组:10,(,......,)Tn Ax b x x x -== 将方程组变形为1,(,......,)T n x Bx f x x x =+= 的形式 移项法111213112122232231323333a a a x b a a a x b a a a x b ⎡⎤⎛⎫⎛⎫⎪ ⎪⎢⎥=⇒ ⎪ ⎪⎢⎥ ⎪ ⎪⎢⎥⎣⎦⎝⎭⎝⎭131211111111123212222222223331323333333000a a b a a ax x a a b x x a a a x xaa b a a a ⎛⎫⎛⎫ ⎪ ⎪ ⎪ ⎪⎛⎫⎛⎫ ⎪ ⎪ ⎪ ⎪=-+ ⎪ ⎪ ⎪⎪ ⎪ ⎪⎪⎪⎝⎭⎝⎭ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎝⎭⎝⎭很容易推广到n 阶简单迭代法(Jacobi 迭代法)1122(,,......,)nn D diag a a a =迭代:11100()1,2,...k k x B x f B I D A f D b k +--=+=--== 0x :初值,任意。
分量式:(1)()11()nk k ii ij j j ii j ixb a x a +=≠=-∑ 1,2,...,i n = ,L U 分别表示A 的下三角和上三角部分(不含对角线)。
A=D+L+U10();0()ij n n ij ij ij L l l a i j l i j B D L U ⨯-==>=≤=-+迭代次数的控制:迭代到1*(1)k k k xx x x ε++-<≈ 取(1)()(1)1()1?()k k k k x x x I D A x D b ++---==-- (1)()1()1()()k k k k x x D Ax b D r +---=-=前述()*()()||||k k x x r cond A xb -≤,控制()()*,()k k rx x cond A - 与有关,对病态方程组,可能ε很小而解的精度不高。
姓名 班级 学号第三章 非线性方程的数值解法一、学习体会本章主要介绍了非线性方程组的方程根的解法,求方程根的步骤,由于非线性方程组只有少数类型能解出根的解析表达式,只能用数值方法求出它的近似值。
求解非线性方程组的方法有作图法等,求根的方法有二分法、迭代法、牛顿法、割线法等。
在学习过程当中,我们要注意各种方法的特点与使用范围,针对不同场合下的非线性方程组,选择合适的方法有利于我们快速准确的得到所要求的结果。
二、知识梳理非线性方程的迭代解法1、对分法对分法的算法步骤如下:对k=0,1……,M 执行(1)计算k 2a kk x b +=; (2)()k f x ε<或者2k k b a ε-<则停止计算。
取s=k x ,否则转(3); (3)若f(k a )f (k x )〈0,令k+1k+1k k a =b =a x ,,;若f(k a )f (k x )〉0则有k+1k+1k k a =b =b x ,,; (4)若k=M ,则输出M 次迭代不成功的信息;否则继续。
2、简单迭代法及其收敛性定理1:设函数()[,]x C a b ϕ∈,在(a,b)内可导,且满足两个条件:(1)当[,]x a b ∈时, ()[,]x a b ϕ∈;(2)当(,)x a b ∈时, |'()|1x L ϕ≤<, 其中L 为一常数。
则有如下结论:(1)方程=()x x ϕ在区间[,]a b 上有唯一的根s ;(2)对任取0[,]x a b ∈,简单迭代法1=()k k x x ϕ+产生的序列{}[,]k x a b ⊂且收敛于s ;(3)成立误差估计式101|-|||1|-|||1kk k k k L s x x x L L s x x x L-≤--≤-- 定理2 设=()s s ϕ,'()x ϕ在包含s 的某个开区间内连续。
如果|'()|<1s ϕ,则存在0δ>,当0[,]x s s δδ∈-+时,由简单迭代法1=()k k x x ϕ+产生的序列{}[,]k x s s δδ⊂-+且收敛于s 。
第三章 矩阵特征值与特征向量的计算--------学习小结一、 本章学习体会通过本章的学习,我们学到了四种矩阵特征值和特征向量的计算方法,分别是幂法、反幂法、Jacobi 方法和QR 方法。
四种方法各有其特点和适用范围。
幂法主要用于计算矩阵按模最大的特征值及其相应的特征向量;反幂法主要用于计算矩阵按模最小的特征值及其相应的特征向量;Jacobi 方法用于求实对称矩阵的全部特征值和特征向量的方法;QR 方法则适用于计算一般实矩阵的全部特征值,尤其适用于计算中小型实矩阵的全部特征值。
归结起来,这四种方法亦有其共同点,那就是都是用了迭代的方法来求矩阵的特征值和特征向量。
此外,用MA TLAB 自带的解法求解特征值和特征向量也非常快速,而且不用编辑函数建立m 文件。
其自带函数Eig 功能强大,即便得到结果是虚数也可以算出,并且结果自动正交化。
二、 本章知识梳理本章对于矩阵的特征值和特征向量的算法提出了新的思路,如幂法和反幂法、Jacobi 、QR 方法等。
本章的小结主要从方法的思想,以及一些定理展开。
2.1各种方法的运用范围1、幂法:主要用于计算矩阵按模最大的特征值和其相应的特征向量;2、反幂法:主要计算矩阵按模最小的特征值以及其相应的特征向量;3、Jacobi 方法:用于求实对称矩阵的全部特征值和特征向量的方法;4、QR 方法:适用于计算一般实矩阵的全部特征值,尤其适用于计算中小型实矩阵的全部特征值。
2.2各种方法的基本思想以及迭代公式 1.幂法幂法的基本思想:设n×n 实矩阵A 具有n 个线性无关的特征向量n x x x ,....,,21,其相应的特征值,,...,21n λλλ满足不等式n λλλλ≥≥>....321,其中iix i Ax λ=)...,3,2,1(n i =。
任取一n 维非零向量u 0,从u 0出发,按照如下的递推公式...)2,1(1===k Au u k k因n 维向量组n x x x ,....,,21线性无关,故对向量u 0必存在唯一的不全为0的数组a 1,a 2,...,a n ,使得n n x a x a x a u +++= (22110)])(...)([ (1)212211122211122110221n n n k n kn n k k n k n k k k k k k x a x a x a x a x a x a x A a x A a x A a u A u A Au u λλλλλλλλ+++=+++=+++=====--设a 1≠0,由上式可以看出,当k 充分大时有111x a u kkλ≈得迭代公式:9u A u k k = (1)从实际中来看,为了避免迭代向量u k 的模过大,(当11>λ)或过小(当11<λ),通常对u kj 进行归一化,使其范数等于1。