三站目标被动定位数据处理算法研究
- 格式:pdf
- 大小:241.92 KB
- 文档页数:5

多基准站RTK技术工作原理和实践应用多基准站RTK(Real-Time Kinematic)技术是一种基于全球导航卫星系统(GNSS)的定位方法,通过同时接收多个基准站的信号,可以实现在实时性要求较高的应用中提供更高精度和更快速的定位服务。
其工作原理包括以下几个步骤:1.基准站数据收集:多个基准站同时接收GNSS卫星信号,并通过接收机将所接收到的无线电波转化为电信号。
2.数据处理与纠正:每个基准站将接收到的信号数据传回中心处理站,中心处理站通过对接收到的数据进行分析,并利用先进的差分算法对信号进行纠正和处理。
3.差分解算:中心处理站将纠正后的信号数据发送回各个基准站,基准站再将这些纠正数据通过无线电信号传送给用户端。
4.用户端接收和计算:用户端(浮动站)接收到经过差分纠正的信号数据,并利用接收机对其进行计算,从而实现高精度的实时定位。
1.测绘和地理信息系统(GIS):多基准站RTK技术可以提供高精度的地面控制点,用于测绘和地理信息系统的数据采集和处理,从而更准确地绘制地图、测量地物及其属性。
2.工程测量:在土木工程等领域中,多基准站RTK技术可以提供高精度的位置信息,用于测量建筑物、道路、桥梁等工程结构的位置、形状和运动状态,从而能够更好地进行工程规划和监测。
3.农业:多基准站RTK技术可以提供农作物生长过程中的精确定位信息,帮助农民进行精确施肥、喷药和播种,从而提高农作物的产量和质量。
4.海洋测绘:多基准站RTK技术可以应用于海洋测绘领域,通过将基准站放置在陆地上并与浮标或船只实时通信,实现对海洋地理信息的高精度测量和获取。
5.交通管理:多基准站RTK技术可以提供高精度的车辆定位信息,帮助交通管理部门实现智能交通管理、车辆导航和交通流量监测。
总之,多基准站RTK技术通过同时接收多个基准站的信号,并进行差分纠正和计算,实现了高精度和实时性的定位服务。
它在测绘、工程测量、农业、海洋测绘和交通管理等领域都具有重要的实践应用价值。

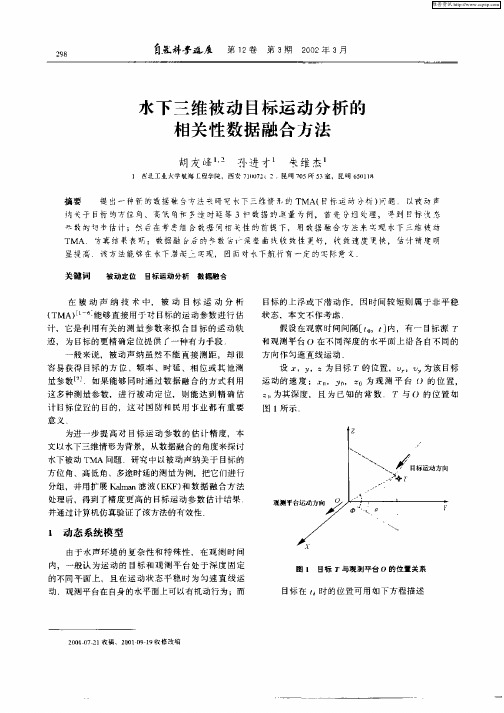
双站无源定位和跟踪算法研究江利中;邹波;谭姗姗【摘要】为提高无源定位和跟踪的性能,弥补传统技术信息量少、定位速度慢和跟踪精度低的缺陷,研究了针对空中目标的基于联合信号到达角(DOA)与到达时间差(TDOA)的双站无源定位算法,以及基于联合到达时间差与到达频率差(FDOA)的双站无源跟踪算法.无源定位算法利用空间几何关系解析目标位置,无源跟踪算法利用无色卡尔曼滤波(UKF)持续跟踪目标并获得更高精度的目标位置信息,给出了两种算法模型.仿真结果表明:联合DOA,TDOA的无源定位算法在基线较短的条件下,对距离100 km内的目标定位精度优于10%,联合TDOA,FDOA的无源跟踪算法的收敛速度较快且跟踪精度能达百米级.【期刊名称】《上海航天》【年(卷),期】2016(033)004【总页数】5页(P45-49)【关键词】双站;无源定位;无源跟踪;到达角;到达时间差;到达频率差;空间几何关系;无色卡尔曼滤波【作者】江利中;邹波;谭姗姗【作者单位】上海无线电设备研究所,上海200090;上海无线电设备研究所,上海200090;上海无线电设备研究所,上海200090【正文语种】中文【中图分类】TN95无源定位是观测站在自身不发射任何电磁波信号条件下,完全被动地接收辐射源目标的电磁波,根据这些电磁波的各项参数确定目标的位置和运动状态信息。
与有源定位相比,无源定位的优势主要有:隐蔽性好;可获得远大于主动雷达的探测距离,能提早发现目标;系统成本较低。
对对海作战的武器来说,无源定位制导技术能使武器尽早探测并发现海面远程空中目标、隐身目标等,提高武器系统在电子战环境中的生存与作战能力。
根据观测站数量无源定位可分为单站无源定位和多站无源定位[1-2]。
近年来快速发展的单站无源定位方法主要包括传统定位法和新型高精度定位法两类[3-7]。
单站无源定位避免了时间同步和复杂的数据处理,具隐蔽性强、设备量小和系统相对独立等优点[2]。

一种三站时差定位的布站优化算法曾辉;曾芳玲;谷玉祥【摘要】测量站的布站直接影响时差定位目标的定位精度.针对一定区域目标整体定位精度的优化,提出了一种三站时差定位的布站优化算法.以水平定位精度因子(HDOP)为定位精度的度量准则,建立布站优化问题的多目标规划数学模型,通过构造最小最大评价函数,求解模型的最优解,从而得到三站时差定位的最优布站.仿真给出了该布站优化算法对某种初始布站进行优化前后两种布站的HDOP分布图.由仿真结果可以看出,相对于初始布站,最优布站对目标区定位精度的提高较为明显,验证了这种布站优化算法的有效性.【期刊名称】《电讯技术》【年(卷),期】2010(050)005【总页数】5页(P18-22)【关键词】三站时差定位;多目标规划;布站优化;评价函数【作者】曾辉;曾芳玲;谷玉祥【作者单位】解放军电子工程学院,合肥,230037;解放军61764部队,海南,三亚,572013;解放军电子工程学院,合肥,230037;解放军61764部队,海南,三亚,572013【正文语种】中文【中图分类】TN9711 引言三站时差定位是一种无源定位方法,利用目标位于地球表面的约束,结合三站分别对目标进行时差测量形成的两路时差数据,实现对目标的三维定位。
因其具有无源被动工作、定位精度高[1-2]等优点,在雷达、无线通信定位[3]、水声定位[4]等领域得到了广泛应用。
对于时差定位系统,目标的定位误差是与目标相对于测量站的几何关系密切相关的[1,5]。
因此,在时差测量误差及测量站站址误差等误差因素一定的情况下,对测量站布站进行优化,是提高定位精度的有效手段。
目前的文献多是对时差定位精度与布站关系的研究,定性地选择某种布站形式为最优布站[5-6]。
本文以提高一定的目标区域的整体定位精度为目标,运用基于多目标规划的最优化算法建立数学模型,构造最小最大评价函数,以使目标区的最大水平定位精度因子(HDOP)最小的布站为最优布站。
G P S导航定位原理以及定位解算算法TYYGROUP system office room 【TYYUA16H-TYY-TYYYUA8Q8-GPS导航定位原理以及定位解算算法全球定位系统(GPS)是英文Global Positioning System的字头缩写词的简称。
它的含义是利用导航卫星进行测时和测距,以构成全球定位系统。
它是由美国国防部主导开发的一套具有在海、陆、空进行全方位实时三维导航与定位能力的新一代卫星导航定位系统。
GPS用户部分的核心是GPS接收机。
其主要由基带信号处理和导航解算两部分组成。
其中基带信号处理部分主要包括对GPS卫星信号的二维搜索、捕获、跟踪、伪距计算、导航数据解码等工作。
导航解算部分主要包括根据导航数据中的星历参数实时进行各可视卫星位置计算;根据导航数据中各误差参数进行星钟误差、相对论效应误差、地球自转影响、信号传输误差(主要包括电离层实时传输误差及对流层实时传输误差)等各种实时误差的计算,并将其从伪距中消除;根据上述结果进行接收机PVT(位置、速度、时间)的解算;对各精度因子(DOP)进行实时计算和监测以确定定位解的精度。
本文中重点讨论GPS接收机的导航解算部分,基带信号处理部分可参看有关资料。
本文讨论的假设前提是GPS接收机已经对GPS卫星信号进行了有效捕获和跟踪,对伪距进行了计算,并对导航数据进行了解码工作。
1 地球坐标系简述要描述一个物体的位置必须要有相关联的坐标系,地球表面的GPS接收机的位置是相对于地球而言的。
因此,要描述GPS接收机的位置,需要采用固联于地球上随同地球转动的坐标系、即地球坐标系作为参照系。
地球坐标系有两种几何表达形式,即地球直角坐标系和地球大地坐标系。
地球直角坐标系的定义是:原点O与地球质心重合,Z轴指向地球北极,X轴指向地球赤道面与格林威治子午圈的交点(即0经度方向),Y轴在赤道平面里与XOZ 构成右手坐标系(即指向东经90度方向)。

多站纯方位无源定位算法研究进展一、本文概述随着现代战争环境的日趋复杂,对目标进行精确的无源定位已成为军事和民用领域的重要需求。
多站纯方位无源定位算法,作为一种不依赖于直接观测目标距离,仅通过多个观测站测得的目标方位角信息来确定目标位置的方法,近年来受到了广泛关注。
该方法具有隐蔽性好、抗干扰能力强、设备成本低等优点,在雷达、声呐、无线电侦测等领域具有广泛的应用前景。
本文旨在综述多站纯方位无源定位算法的研究进展,通过梳理国内外相关文献和研究成果,分析不同算法的原理、优缺点及适用范围,探讨算法性能评估方法和实际应用中的关键问题。
本文还将关注最新研究成果和技术趋势,为相关领域的研究人员和实践者提供有益的参考和启示。
本文首先简要介绍了无源定位技术的发展背景和纯方位定位的基本原理,然后重点分析了多站纯方位无源定位算法的主要研究内容和方法,包括基于几何关系的定位算法、基于优化理论的定位算法以及基于技术的定位算法等。
在此基础上,本文还将讨论算法性能评估的常用指标和方法,以及实际应用中需要解决的关键问题,如观测误差、多径效应、目标运动等。
通过本文的综述和分析,希望能够为相关领域的研究人员和实践者提供全面的信息和深入的理解,推动多站纯方位无源定位算法的研究和应用发展。
二、多站纯方位无源定位基本原理多站纯方位无源定位算法,是一种利用多个观测站对目标进行纯方位测量的定位方法。
所谓“纯方位”,指的是在定位过程中,仅利用目标相对于观测站的方向信息,而不依赖距离或其他类型的测量数据。
多站则指的是使用多个观测站对目标进行协同观测,以获取更全面、更精确的定位信息。
数据采集:各个观测站通过自身的传感器设备,如雷达、声呐等,捕获目标发出的信号或反射的信号,从而确定目标相对于观测站的方位角。
数据融合:各观测站将测得的方位角信息传输至数据处理中心,进行数据融合。
数据融合的目的是将多个观测站的信息结合起来,形成对目标位置的更全面、更准确的描述。
时差法被动测量数据实时处理系统的设计与实现杨家庚;孙大鹏【摘要】为实现时差法被动测量数据的实时处理,采用主控计算机和微控制器主从结构及其相关软件功能设计和实现一个实时处理系统。
该系统的核心处理软件采用改进的多点球面内插法,结合数据的综合预处理步骤,实现了对高速运动水下目标测量数据的轨迹实时处理与显示。
实际使用验证,该系统实时处理结果离散度小、与事后处理结果一致性好、通用性和海上适应性良好,具有明显的军事和经济效益。
%In order to achieve real-time processing on passive measurement data with time difference approach,we design and implement a real-time processing system by using a host-slave structure consisted of host computer and MCU and its related software functions.The core processing software of the system adopts improved multipoint spherical interpolation method to have achieved real-time trajectory processing and display onthe measurement data of high speed underwater moving objects in combination with synthetical pre-processing steps on the data.Practicaluse verifies that the system has low dispersion in real-time processing results and good consistency with post-process results.It also has good universality and marine adaptability as well,thus has remarkable military and economical benefits.【期刊名称】《计算机应用与软件》【年(卷),期】2014(000)010【总页数】4页(P73-76)【关键词】被动测量;球面内插法;实时处理;时差法【作者】杨家庚;孙大鹏【作者单位】大连旅顺91439部队辽宁大连 116041;大连旅顺91439部队辽宁大连 116041【正文语种】中文【中图分类】TP399被动定位是声呐、雷达等领域的重要课题。
站点选址问题的多目标优化算法研究站点选址是一种具有广泛应用领域的问题,它涉及到的关键决策是选择一个最佳的位置建立新的设施或资源。
例如,选址可以涉及到选择一个最佳的地点建立新的购物中心,超市或学校。
这些设施在社区内具有关键作用,因为它们提供了重要的服务和设施,使居民能够享受更好的生活。
但是,站点选址问题并不是一项简单的任务。
它涉及到多个需求和因素,这些需求和因素往往是相互矛盾和有竞争性的。
这就需要我们利用最新的多目标优化算法和数据科学技术来解决这些复杂的决策问题。
首先,选择一个最佳的位置需要考虑多个因素,例如人口密度,市场潜力,人口流动性等。
这些因素往往是相互关联的,并且很难单独考虑。
这就需要我们使用数学建模和数据分析来处理这些问题。
我们可以使用现代的数据科学技术,例如人口普查数据,社会媒体数据等,来收集和分析相关的数据。
其次,站点选址问题还涉及到多个目标。
例如,我们可能需要在确保服务质量和水准的同时,还要保证成本低廉。
这些目标往往是相互矛盾和有竞争性的。
这就需要我们使用多目标优化算法来找到最佳解决方案。
如何应对这些挑战呢?一个简单的但非常有用的方法是使用非支配排序遗传算法(NSGA-II)。
NSGA-II是一种常用的多目标优化算法,它能够找到多个优秀的解决方案,使得这些方案在所有目标上都非常接近最优。
通过使用NSGA-II算法,我们可以找到多个最佳站点位置,这些位置能够在不同的条件下提供服务质量保证和较低的成本。
要使用NSGA-II算法来解决站点选址问题,我们需要采取以下步骤:1. 定义决策变量和目标函数。
在站点选址问题中,决策变量是地理位置,包括经度和纬度。
目标函数是用户需求,成本,市场金融潜力等因素。
2. 收集和处理相关的数据。
数据可以来自不同的来源,例如社会媒体,人口普查,市场潜力分析等。
我们需要优化数据收集和处理的过程,确保数据准确和有用。
3. 设计和实现多目标优化算法。
NSGA-II算法是一种常用的多目标优化算法,能够对不同的目标进行最优化。
*陈守稳顾尔顺(航天工业总公司二院二部北京100854)摘要对几种被动定位方法的定位精度进行了计算比较,选择了可行的定位方法,分析了影响定位精度的有关因素,并对其加以说明。
主题词被动定位,测向交会,纯时差,测向)测时差,定位精度1引言被动定位即无源定位,其特点是不能获得辐射源的距离信息,因此,必须采用多站测量对目标进行定位。
被动定位通常是利用单站的测角信息或多站测时差来完成,文中就测向交叉、测时差、测向)时差混合定位三种方法进行了定位误差的计算,对结果进行了分析并得到结论。
2被动定位算法模型211测向交叉定位法是指通过测量辐射源的到达角京国防工版社数运算确定目标位置。
以下推导中京均假设有N部雷达京在直版坐标系(x轴正东京y轴正北京z轴天顶)中站址分别为(x i京y i京z i)京i= 1京2京,京N京各雷达对辐射源测得的方位版和俯仰版是(B i京E i)。
假设已知1号站测得目标的角度(B1京E1)京i号站测得目标版度(B i京E i)京可利用下面几种方法求取R1。
方法1:R1=(x1-x i)sin B i-(y1-y i)cos B icos E1sin(B1-B i)(1)方法2:R1=(x1-x i)sin E i-(z1-z i)cos E i cos B isin E1cos E i cos B i-cos E1cos B1sin E1(2)*收稿日期:1998-05-28第26卷第5期现代防御技术1998年9月方法3:R 1=(y 1-y i )sin E i -(z 1-z i )cos E i sin B isin E 1cos E i sin B i -cos E 1sin B 1sin E i(3)方法4:可以利用前述的3种方法中的任一种京将式(1)、式(2)或式(3)中的全部下标1改成下标j 京即可计算出目标到j 号站的斜距R j 京然后利用下列公式即可求出R 1:x t =x j +R j cos E j cos B jy t =y j +R j cos E j sin B j z t =x j +R j sin E jR 1=[(x t -x 1)2+(y t -t 1)2+(z t -z 1)2]1/2(4)采用1号(-2813京-2813京0)京2号(2813京2813京0)的布站方式京比较方法1京2京3对空中各点的定位误差京取最小值京记录其对应的定位方法号码京各定位方法在xOy 平面的分布见图1京图例1京2京3分别对应定位方法1京2京3。
红外探测与追踪的双机被动定位模型郝振兴;罗继勋;胡朝晖;李文超【摘要】针对机载红外探测与追踪(IRST)被动定位的精度低和解算速度慢及多机间信息大容量实时传输问题,提出了两种应用激光数据链传输信息的 IRST 双机被动定位模型。
模型均基于测向交叉定位原理构建,模型一的基线距离已知,两机坐标未知;模型二的两机坐标已知,基线距离未知;并对比了两种模型的特性。
仿真表明,测角误差减小,两机距离增大,会提高定位精度;模型二的计算速度优于模型一,但目标高度大于1 km时,模型二失效;双机与目标构成等腰三角形且两载机的交角为110°时,定位的精度最高。
%For the problem of low accuracy,settlement calculation speed and large capacity information real-time transmission of airborne infrared search and track (IRST)among multiple machine problem,two application la-ser data link transmission information of IRST passive positioning of two models were put forward.The models were built on the basis of the principle of direction of arrival location,a baseline distance was known and aircraft coordinates unknown.Simulation results showed that the measuring angle error was reduced,the positioning ac-curacy was improved when the two machine distance increased;the computing speed of model two was better than model one,but,when the target height was greater than 1 km,model two failed;when two aircrafts and target forming a isosceles triangle and the two aircraft crossing angle was 1 10 °,the highest accuracy was gained.【期刊名称】《探测与控制学报》【年(卷),期】2016(038)001【总页数】5页(P28-32)【关键词】激光数据链;机载红外探测与追踪;测向交叉定位;几何精度因子【作者】郝振兴;罗继勋;胡朝晖;李文超【作者单位】空军工程大学航空航天工程学院,陕西西安 710038;空军工程大学航空航天工程学院,陕西西安 710038;空军工程大学航空航天工程学院,陕西西安 710038;解放军 95896 部队,河北沧州 061736【正文语种】中文【中图分类】V271.4被动(无源)探测定位系统利用目标辐射源的辐射信息探测目标并确定出目标位置,具有作用距离远、隐蔽性能好等优点,在现代信息化战争中有着广泛的应用前景[1]。