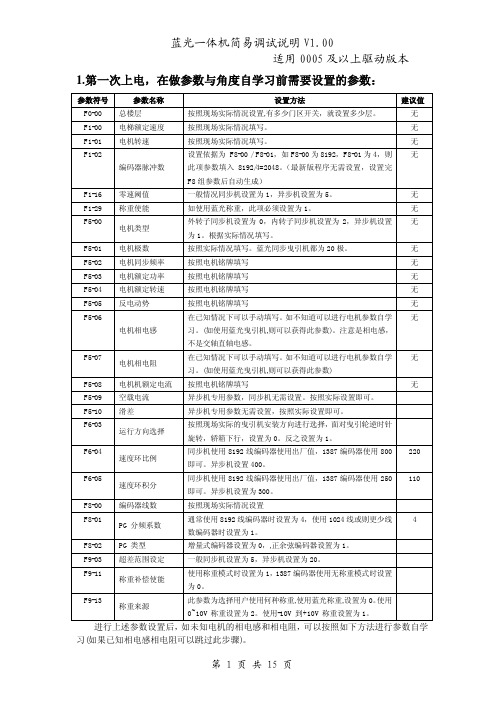
参数调整简易手册
- 格式:doc
- 大小:37.50 KB
- 文档页数:6

浪潮服务器简易配置手册浪潮服务器是一种高性能、高可靠的服务器设备,为了帮助用户更好地使用浪潮服务器,我们编写了本简易配置手册。
本手册将引导您完成浪潮服务器的基本配置,确保其正常工作并满足您的需求。
一、初始设置1. 请确保已正确连接浪潮服务器的电源和网络线。
2. 开启服务器后,根据屏幕提示进入BIOS设置界面。
具体的按键组合可能因不同型号的服务器而有所区别,请参考服务器设备的说明文档。
3. 在BIOS设置界面中,您需要完成以下配置:- 设置服务器的日期和时间,以确保日志等功能正常运行。
- 配置启动顺序,以选择从哪个设备引导操作系统。
- 检查硬件信息,确保所有组件正常工作。
二、操作系统安装1. 根据您的需求选择合适的操作系统,并准备好安装介质,如光盘或U盘。
2. 将安装介质插入服务器,并重启服务器。
3. 按照屏幕提示完成操作系统的安装过程,包括选择分区、设置管理员密码等。
4. 安装完成后,根据需要进行系统更新和驱动程序的安装。
三、网络配置1. 打开操作系统的网络设置界面,配置服务器的网络连接方式,如静态IP或动态获取IP等。
2. 配置服务器的域名解析,以便能够通过域名进行远程访问。
3. 配置服务器的防火墙和安全策略,确保网络连接的安全性。
四、存储配置1. 检查服务器的硬盘情况,确认是否已正确识别所有硬盘设备。
2. 根据需求进行磁盘分区和格式化操作。
3. 配置服务器的RAID,提供磁盘冗余和性能提升的功能。
4. 设置磁盘阵列的热备份和自动恢复功能,以确保数据的安全性。
五、用户与权限管理1. 设置服务器的管理员账号和密码,并确保密码的复杂性和安全性。
2. 根据需求创建其他用户账号,并设置对应的访问权限。
3. 配置服务器的用户组,以方便对用户进行分类管理。
六、服务配置1. 根据需要安装和配置不同的服务,如Web服务器、数据库服务器等。
2. 配置服务的启动项和参数,确保其正常运行和满足您的要求。
3. 监控服务的运行状态,及时处理异常情况。

LI-6400便携式光合仪的使用说明1. 仪器使用功能LI-6400并非单一用于研究植物光合作用,他同时包括光合、呼吸(分为植物呼吸和土壤呼吸)、蒸腾、荧光等多项测量功能,多项功能的完全集成使得LI-6400成为生态学研究领域上重要的、必不可少的基础研究设备。
其测量参数包括:净光合速率(Pn)、气孔导度(Gs)、蒸腾速率(Ts)、细胞间隙CO2浓度(Ci)、大气CO2浓度(Ca)、光量子通量密度(PFD)、叶温(TL)、相对空气湿度(RH)。
如果配备6400-40叶绿素荧光叶室,可测试以下参数:最大荧光(Fm)、初始荧光(Fo)、可变荧光(Fv)、光化学猝灭(qP)、非化学猝灭(qN)。
此外,进行自动测量的基础上还可以进一步计算光饱和点、光补偿点、CO2饱和点、CO2补偿点等多项重要生理生态指标。
表1 LI-6400参数表(2. 硬件组成与存放正确的硬件连接与存放对于使用和维护来说是至关重要的。
关于仪器的连接请与培训人员联系学习。
图1 仪器在主机箱内的安放位置与名称(请注意安放的方式)3. 仪器使用流程3.1仪器安装连接:正确连接仪器管线,并连接好进气管缓冲瓶(注意样品室、参照室管路连接,信号线红色Mark 标记要相对,除去外置光量子传感器红色盖帽)。
3.2开机:打开位于主机右侧的电源开关。
3.3仪器在启动后将显示“Is the IRGA connected?(Y/N)” 选择Y 3.4叶室配置选择:选择目前安装的叶室配置,如果安装的是标准叶室,请选择Factory default ,然后回车。
如果安装了荧光叶室,请选择6400-40 Default Flurometer ,然后回车。
如果安装了土壤叶室,请选择6400-09 soil Chamber ,然后回车。
其他叶室方法相同,只需要选择不同的叶室就可以了。
3.5调零向SCRUB 方向拧紧碱石灰管 和干燥管上端的螺母。
关闭叶室(压下黑色手柄),并旋紧固定螺丝即可。
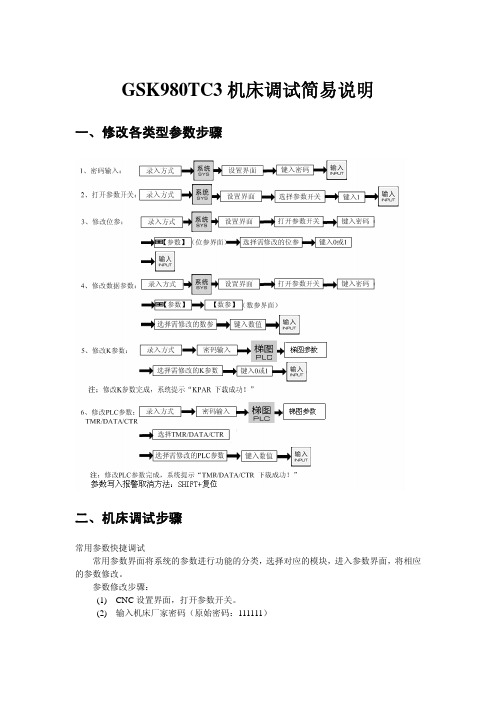
GSK980TC3机床调试简易说明一、修改各类型参数步骤二、机床调试步骤常用参数快捷调试常用参数界面将系统的参数进行功能的分类,选择对应的模块,进入参数界面,将相应的参数修改。
参数修改步骤:(1) CNC设置界面,打开参数开关。
(2) 输入机床厂家密码(原始密码:111111)A :机床上电后,查看并消除系统各类报警:1、急停报警:系统急停信号为常闭触点,当急停信号状态为0时将出现急停报警。
在诊断(X 信号)界面查看信号X9.4(外部急停报警)状态;当K6.3=1(使用外接手轮急停),同时要查看信号X11.0(外接手轮急停)状态。
当上述某一信号状态为0时,要检查对应的急停开关是否被按下,对应信号的回路接线是否正确。
假如外接手轮脉冲发生器没有急停开关,可以将K6.3(是否使用外接手轮急停)设置为0。
系统如无需安装急停开关,可将急停信号短接到系统+24V ,或者将位参数N0:61#5(是否忽略急停报警)设置为1。
注意:位参数N0:61#5(是否忽略急停报警)设置为1时,外部急停和外接手轮急停报警都无效。
2、硬限位报警:系统硬限位信号为常闭触点,当信号状态为0时将出现硬限位报警。
根据报警信息,在诊断(X信号)界面查看相应报警轴信号。
X0.0至X0.3为各轴硬限位信号。
若各轴仅使用一个限位开关,则需将PLC参数K6.0修改为1。
配绝对式电机,无硬限位开关时,将位参数N0:61#6(是否忽略硬限位报警)设置为1。
3、驱动器报警通电时,系统若显示X轴、Z轴或主轴驱动单元报警,应先检查对应的驱动单元是否显示报警。
若显示报警,可以根据显示的报警号对应驱动单元说明书找出报警原因,然后进行排除,消除报警。
若驱动器不显示报警,首先确认驱动单元连线是否正确,若连线正确,则系统的报警参数所设定的电平与驱动单元的报警电平不匹配,可以修改位参数NO:19#0 ~ NO:19#4(进给轴报警电平)或者NO:19#5~ NO:19#6(主轴报警电平)。

外轴参数调整一、ABB机器人对外轴的控制参数的调整的基本步骤完成外轴的硬件安装,如电机的安装,SMB盒的安装等;向机器人控制器内加载外轴的临时参数文件;对加载的临时参数进行修改和配置,保证机器人此时能够控制电机的转动;如果客户需要对电机有额外的设置,如抱匝、使能和里控制等,需要额外的配置和设置;等所有的参数设置都完成后开始电机参数的调整。
二、配置外轴参数2.1加载参数2.1.1在示教器上点击Control Panel进入Configuration选项,选择File ,Load parameters加载通用的参数文件:2.1.2选择:Load parameters if no duplicates 然后选择如下路径加载参数:Mediapool\RobotWare_5.XX.XXXX \utility\ Additional Axis\DM1\General,然后选择相应的文件加载;2.1.3重启系统。
2.2配置参数2.2.1在Motion中选择Mechanical Unit并且定义如下参数NameStandby State: Yes/NoActivate at Start UpDeactivation ForbiddenUse Single 12.2.2在Motion中选择Single定义Single;NameSingle2.2.3在Motion中选择Single Type定义外轴的种类;有以下几种选项可以选择:TRACK; FREE_ROT; EXT_POS; TOOL_ROT;2.2.4在Motion中选择Joints,为外轴指定外轴的序号;如:第10个轴对应与robtarget中的eax_d2.2.5在Motion中选择Arm,定义外轴的运动范围;Upper Joint Bound;Lower Joint Bound;2.2.6在Motion中选择Accelerarion Data,定义外轴加速和减速运动参数;Nominal Acceleration;Nominal Deceleation;2.2.7在Motion中选择Transmission,定义外轴与传动比相关的参数;(这些参数与减速机相关)Transmission Gear Ratio;Rotating MoveTransmission High GearTransmission Low Gear2.2.8在Motion中选择Motor Type,定义下面的参数;(这些参数有电机供应厂商提供)Pole parisKe Phase to phase (Vs/Rad)Max current (A)Phase resistance(ohm)Phase inductance(H)2.2.9在Motion中选择Motor Calibration,定义下面的参数;Calibration offset;通过Fine calibration获得;Commutator offset:电机供应商提供;2.2.10在Motion中选择Stress Duty Cycle,定义最大扭矩和最快转速;Torque Absolute Max;Speed Absolute Max;Note:如果Torque Absolute Max太大会造成配置错误,因此通常定义如下:Torque Absolute Max < 1.732 ×Ke Phase to Phase×Max Current;通过计算出的值适当的减小(5~10);2.2.11重启系统;三、参数调整3.1.检测电机的连接正确性这段主要讲述应用ABB标准的程序Commutation来验证电机参数是否配置合理,主要验证以下几项功能:寻找同步永磁电机的Commutation的值;检查电机的相序是否正确;检查电机的电机对是否设置正确;检查Resolver的连接是否良好。

ach580参数手册摘要:一、引言二、ACH580参数概述1.参数分类2.参数功能三、ACH580参数详解1.基本参数a.设备名称b.设备型号c.设备编号d.设备位置2.性能参数a.最大速度b.最小速度c.加速/减速时间d.负载能力3.操作参数a.操作模式b.操作员权限c.故障应对策略d.安全防护设置4.维护保养参数a.保养周期b.保养内容c.故障报警设置d.故障诊断接口四、ACH580参数设置与调整1.参数设置方法2.参数调整步骤3.注意事项五、ACH580参数在日常运行中的应用1.设备运行控制2.设备状态监控3.设备故障排查六、结论正文:一、引言随着现代工业自动化技术的不断发展,设备参数调整与应用已成为企业生产中不可或缺的一部分。
ACH580作为一种高性能的自动化设备,其参数设置与运用显得尤为重要。
本文将详细介绍ACH580参数手册,帮助读者更好地理解和应用ACH580设备。
二、ACH580参数概述1.参数分类ACH580设备参数主要分为四大类:基本参数、性能参数、操作参数和维护保养参数。
2.参数功能基本参数主要用于设备识别;性能参数决定设备运行性能;操作参数关乎设备操作安全性;维护保养参数则是保证设备长期稳定运行的关键。
三、ACH580参数详解1.基本参数(1)设备名称:标识设备唯一性,方便管理。
(2)设备型号:区分设备类型,便于选购配件。
(3)设备编号:便于设备信息化管理。
(4)设备位置:记录设备安装位置,方便现场查找。
2.性能参数(1)最大速度:设备最高运行速度。
(2)最小速度:设备最低运行速度。
(3)加速/减速时间:决定设备加速/减速过程中的平滑程度。
(4)负载能力:设备所能承受的最大负载。
3.操作参数(1)操作模式:设定设备操作方式,如手动/自动。
(2)操作员权限:划分操作员级别,保障设备安全。
(3)故障应对策略:设备发生故障时,自动采取措施。
(4)安全防护设置:预防潜在安全隐患。
c075变频器调参手册摘要:一、引言二、变频器调参的重要性三、变频器调参的基本步骤1.准备工作2.了解参数含义3.调整参数4.检查与验证四、常见参数及其调整方法1.基本参数2.控制参数3.保护参数五、调参过程中的注意事项六、总结正文:【引言】变频器作为工业自动化领域中广泛应用的设备,其参数设置对于整个系统的运行至关重要。
正确地调整参数,可以确保变频器稳定、高效地运行,同时也有利于延长设备的使用寿命。
本文将详细介绍变频器调参手册中的相关内容,以帮助用户更好地掌握调参技巧。
【变频器调参的重要性】变频器参数设置涉及到设备的运行性能、稳定性和安全性。
合理的参数设置可以提高生产效率,降低能耗,减小设备故障率,从而为企业节约成本。
【变频器调参的基本步骤】1.准备工作:在开始调参之前,需要确保变频器已经安装完毕,并接通电源。
同时,需要准备好相关的工具和资料,如操作手册、万用表等。
2.了解参数含义:在调整参数之前,用户需要对参数表中的各个参数及其作用有所了解,以便正确地进行调整。
3.调整参数:根据实际需求和设备状况,按照操作手册的指导,逐步调整各个参数。
在调整过程中,应密切关注设备运行状态,如有异常,需及时处理。
4.检查与验证:参数调整完成后,需要对设备进行试运行,验证参数设置是否合理。
如发现异常,可再次调整参数,直至满足要求。
【常见参数及其调整方法】1.基本参数:包括频率、电流、电压等,这些参数通常在设备出厂时已经设置好,用户可以根据实际需求进行微调。
2.控制参数:如加速/减速时间、电流限制、过压/欠压保护等,这些参数的调整需根据设备的特性和运行要求进行。
3.保护参数:如过热保护、过载保护、短路保护等,这些参数的设置应根据设备的使用环境和负载状况进行,以确保设备的安全运行。
【调参过程中的注意事项】1.在调整参数时,应遵循操作手册的指导,避免盲目调整,以免造成设备损坏。
2.在调整过程中,应密切关注设备运行状态,如有异常,需及时处理。
外轴参数调整一、ABB机器人对外轴的控制参数的调整的基本步骤●完成外轴的硬件安装,如电机的安装,SMB盒的安装等;●向机器人控制器内加载外轴的临时参数文件;●对加载的临时参数进行修改和配置,保证机器人此时能够控制电机的转动;●如果客户需要对电机有额外的设置,如抱匝、使能和里控制等,需要额外的配置和设置;●等所有的参数设置都完成后开始电机参数的调整。
二、配置外轴参数2.1加载参数2.1.1在示教器上点击Control Panel进入Configuration选项,选择File ,Load parameters加载通用的参数文件:2.1.2选择:Load parameters if no duplicates 然后选择如下路径加载参数:Mediapool\RobotWare_5.XX.XXXX\utility\ Additional Axis\DM1\General,然后选择相应的文件加载;2.1.3重启系统。
2.2配置参数2.2.1在Motion中选择Mechanical Unit并且定义如下参数●Name●Standby State: Yes/No●Activate at Start Up●Deactivation Forbidden●Use Single 12.2.2在Motion中选择Single定义Single;●Name●Single2.2.3在Motion中选择Single Type定义外轴的种类;有以下几种选项可以选择:TRACK; FREE_ROT; EXT_POS; TOOL_ROT;2.2.4在Motion中选择Joints,为外轴指定外轴的序号;如:第10个轴对应与robtarget中的eax_d2.2.5在Motion中选择Arm,定义外轴的运动范围;●Upper Joint Bound;●Lower Joint Bound;2.2.6在Motion中选择Accelerarion Data,定义外轴加速和减速运动参数;●Nominal Acceleration;●Nominal Deceleation;2.2.7在Motion中选择Transmission,定义外轴与传动比相关的参数;(这些参数与减速机相关)●Transmission Gear Ratio;●Rotating Move●Transmission High Gear●Transmission Low Gear2.2.8在Motion中选择Motor Type,定义下面的参数;(这些参数有电机供应厂商提供)●Pole paris●Ke Phase to phase (Vs/Rad)●Max current (A)●Phase resistance(ohm)●Phase inductance(H)2.2.9在Motion中选择Motor Calibration,定义下面的参数;●Calibration offset;通过Fine calibration获得;●Commutator offset:电机供应商提供;2.2.10在Motion中选择Stress Duty Cycle,定义最大扭矩和最快转速;●Torque Absolute Max;●Speed Absolute Max;Note:如果Torque Absolute Max太大会造成配置错误,因此通常定义如下:Torque Absolute Max< 1.732 ×Ke Phase to Phase×Max Current;通过计算出的值适当的减小(5~10);2.2.11重启系统;三、参数调整3.1.检测电机的连接正确性这段主要讲述应用ABB标准的程序Commutation来验证电机参数是否配置合理,主要验证以下几项功能:●寻找同步永磁电机的Commutation的值;●检查电机的相序是否正确;●检查电机的电机对是否设置正确;●检查Resolver的连接是否良好。
外轴参数调整一、ABB机器人对外轴的控制参数的调整的基本步骤●完成外轴的硬件安装,如电机的安装,SMB盒的安装等;●向机器人控制器内加载外轴的临时参数文件;●对加载的临时参数进行修改和配置,保证机器人此时能够控制电机的转动;●如果客户需要对电机有额外的设置,如抱匝、使能和里控制等,需要额外的配置和设置;●等所有的参数设置都完成后开始电机参数的调整。
二、配置外轴参数2.1加载参数2.1.1在示教器上点击Control Panel进入Configuration选项,选择File ,Load parameters加载通用的参数文件:2.1.2选择:Load parameters if no duplicates 然后选择如下路径加载参数:Mediapool\RobotWare_5.XX.XXXX \utility\Additional Axis\DM1\General,然后选择相应的文件加载;2.1.3重启系统。
2.2配置参数2.2.1在Motion中选择Mechanical Unit并且定义如下参数●Name●Standby State: Yes/No●Activate at Start Up●Deactivation Forbidden●Use Single 12.2.2在Motion中选择Single定义Single;●Name●Single2.2.3在Motion中选择Single Type定义外轴的种类;有以下几种选项可以选择:TRACK; FREE_ROT; EXT_POS; TOOL_ROT;2.2.4在Motion中选择Joints,为外轴指定外轴的序号;如:第10个轴对应与robtarget中的eax_d2.2.5在Motion中选择Arm,定义外轴的运动范围;●Upper Joint Bound;●Lower Joint Bound;2.2.6在Motion中选择Accelerarion Data,定义外轴加速和减速运动参数;●Nominal Acceleration;●Nominal Deceleation;2.2.7在Motion中选择Transmission,定义外轴与传动比相关的参数;(这些参数与减速机相关)●Transmission Gear Ratio;●Rotating Move●Transmission High Gear●Transmission Low Gear2.2.8在Motion中选择Motor Type,定义下面的参数;(这些参数有电机供应厂商提供)●Pole paris●Ke Phase to phase (Vs/Rad)●Max current (A)●Phase resistance(ohm)●Phase inductance(H)2.2.9在Motion中选择Motor Calibration,定义下面的参数;●Calibration offset;通过Fine calibration获得;●Commutator offset:电机供应商提供;2.2.10在Motion中选择Stress Duty Cycle,定义最大扭矩和最快转速;●Torque Absolute Max;●Speed Absolute Max;Note:如果Torque Absolute Max太大会造成配置错误,因此通常定义如下:Torque Absolute Max< 1.732 ×Ke Phase to Phase×Max Current;通过计算出的值适当的减小(5~10);2.2.11重启系统;三、参数调整3.1.检测电机的连接正确性这段主要讲述应用ABB标准的程序Commutation来验证电机参数是否配置合理,主要验证以下几项功能:●寻找同步永磁电机的Commutation的值;●检查电机的相序是否正确;●检查电机的电机对是否设置正确;●检查Resolver的连接是否良好。
参数调整简易手册一.对于SDCCH拥塞:可以通过以下思路来解决:a)减少不必要的SDCCH请求,例如介于不同LAC之间的反复的小区重选。
对应的参数Cell Reselect Hyst:该参数定义了小区重选需要的接收电平的滞后值。
当邻小区的路径损耗参数C1大于当前服务小区的C1值连续5秒时,就进行小区重选。
如果两个小区属于不同的LAC时,邻小区的路径损耗参数C1大于当前服务小区的C1值CELLRESELECTHYST连续5秒时,才进行小区选择,同时进行一次位置更新。
为了避免过多的频繁的位置更新,小区重选滞后通常建议设置为6dB或8dB。
在下列情况下建议作适当的调整:∙当某地区的业务量很大,经常出现信令流量过载现象,建议将该地区中属于不同LAC的相邻小区的小区重选滞后参数增大。
∙若属于不同位置区的相邻小区其重叠覆盖范围较大时,建议增大小区重选滞后参数。
∙若属于不同LAC的相邻小区在邻接处的覆盖较差,即出现覆盖的“缝隙”时,或这种邻接处地理位置处于高速公路等慢速移动物体较少的地区,建议将小区重选滞后参数设置在2~6dB之间。
b)提高SDCCH的分配成功率:a.MC8B_NBR_ACC_GRANT远小于MC8C_NBR_ACC_RANDOM时,说明可能AGCH太少,导致无法分配SDCCH,MS会反复请求SDCCH.可以适当增加BS_AG_BLK_RES.. 参数“接入准许保留块数”用以表示每个BCCH复帧中CCCH信道上为AGCH保留的消息块数。
其取值范围为:●若CCCH与SDCCH共用物理信道(CCCH_CONF=1):0~2 (对于CBC结构,BS_AG_BLK_RES通常设为1.)●若CCCH与SDCCH不共用物理信道(CCCH_CONF=0):0~5(对于BCC结构,BS_AG_BLK_RES通常设为4.)b.MC149_NBR_SDCCH_ASS_FAIL_MS_ACC_PBL/MC148_NBR_ASS_SDCCH_SEIZ_ATTEMPT 过大。
可能是存在Ghost Cell,应该保证相近的小区如果有相同的BCCH时,他们的BCC不同;或者某小区覆盖的太远;这时都可以适当设置RACH TA Filter,保证该小区覆盖它的设计范围。
参数RACH_TA_FILTER限制了只有TA小于设定值的手机才可以接入.用时间提前量计算移动台与基站间的距离实际上是很不精确的。
因此为了设置恰当的值,必须在小区设计的覆盖范围内进行测量,以获得小区中最大的时间提前量TAmax,设置RACH_TA_FILTER=TAmax+5。
注意事项:一般市区内由于信号反射较多,TA值不易小于10。
对于郊区覆盖较差的地方,为了保证覆盖,也不易将TA设的过小。
通常可以通过调整天线来保证覆盖。
c.修改计时器可供修改的相应的计时器为WI_OC,WI_EC,WI_CR,WI_OP.他们分别代表在立即分配过程中的主叫过程,紧急呼叫,呼叫重建,以及其他过程中一次分配不成功后,必须等待一段时间才能进行下一次请求过程。
通常可以先跟据话务报告(C01,C02)来判定哪些类型的分配较多,在修改相应的计时器,可以从1秒开始进行尝试,逐渐增加。
计时器应该保证是使拥塞减少到最低限度的最短时间。
如果有副作用,比如拥塞反而增加,应将该计时器恢复为0。
注意事项:使用该功能前,应将En Im.Ass.Rej设为Enable(在BSS Parameters 窗口的BSS Functions页中)。
二.TCH 拥塞:减少接入用户的数目,减少切入用户数目,增加切出用户的数目。
a.增加RxLev_Access_Min来提高对接入的要求,来平衡话务量。
除了在一些基站密度较高、无线覆盖较好的地区外,一般不建议采用RXLEV_ACCESS_MIN 来调整小区的业务量。
注意事项:对于一般情况,G2BTS设为-100dBm,G3BTS设为-105dBm。
修改时可以以2dBm为单位进行提高,但是必须通过路测来确认没有忙区。
b. 通过调整CELL RESELEC OFFSET、TEMPORARY OFFSET、PENALTY_TIME来改变小区选择的倾向。
第一,对于业务量很大或由于某种原因使小区中的通信质量较低时,一般希望移动台尽可能不要工作于该小区(即对该小区具有一定的排斥性)。
这种情况下,可以设置PT为31,因此参数TO失效。
C2的数值等于C1减CRO,因此对应于该小区的C2值被人为地降低,从而使移动台以该小区作为重选的可能性降低。
此外,网络操作员根据对该小区的排斥程度,可以设置适当的CRO。
排斥越大,CRO 越大,反之,CRO越小。
第二,对于业务量很小,设备利用率较低的小区,一般鼓励移动台尽可能工作于该小区(即对该小区具有一定的倾向性)。
这种情况下,建议设置CRO在0~20dB 之间,根据对该小区的倾向程度,设置CRO。
倾向越大,CRO越大,反之,CRO 越小。
TO一般建议设置与CRO相同或略高于CRO。
PT主要作用是避免移动台的小区重选过程过于频繁,一般建议的设置为0(20秒)或1(40秒)。
第三,对于业务量一般的小区,一般建议设置CRO为0,PT为31,从而使C2=C1,也即不对小区施加人为影响。
上述参数的调整必须注意下列问题。
∙无论在何种情况下不建议设置CRO的数值超过25dB,因为过大的CRO 会使网络发生一些不稳定的现象。
∙上述参数的设置是基于每个小区的,但由于参数C2的性质与邻区有密切的关系,因此在设置这些参数时必须注意相邻小区之间的关系。
c.增加Rxlev_Min(N)和切入的HO Margin来提高切入的要求,来减少服务小区的话务负荷。
通过启用LoadFactor和FreeFactor来平衡切换的方向。
(Enable it first)参数LoadFactor指示了在对应的LoadLevel下(即忙的TCH占整个小区TCH 的百分比)对GRADE算法值的修正,以考虑目标小区的话务负载情况.一般对负载较大的小区其对应的LoadFactor采用负值.而且LoadFactor(n)>=LoadFactor(n+1);参数FreeFactor指示了在对应的FreeLevel下(即空闲的TCH的个数)对GRADE算法值的修正,以考虑目标小区空闲的情况.一般对负载较大的小区,对其FreeLevel较小(即空闲TCH较少时)的FreeFactor采用负值 .而且FreeFactor(n)<=FreeFactor(n+1).d.减小切出的HO Margin,以利于切出。
一般以2为单位进行下调。
e.启用Direct Retry和Force Direct Retry。
Direct Retry功能是指手机在占用到SDCCH时,产生了HO ALARM,这时系统可以分配邻小区的TCH信道给手机。
即从服务小区的SDCCH信道切换到邻小区的TCH信道上。
Force Direct Retry功能是指手机在占用到SDCCH时,邻小区满足一定的条件,(这时并没有产生HO ALARM,这一点与Direct Retry不同),就可以切换到邻小区的TCH信道上。
要满足的条件由以下3个参数来决定:L_RxLev_DR(n):定义了手机切换到邻小区的TCH,必须满足的对邻小区的最小接收电平。
缺省值为-85dBm。
A_PBGT_DR:定义了测量邻小区接收电平的区平均值的窗口大小。
缺省值为4。
Freelevel DR(n):定义了邻小区必须有多少个空闲TCH信道才允许Direct Retry。
缺省值为:6三.有关功率控制的参数对于环境复杂,信号变化快的地区,通常是市中心房屋较为密集的地方.可以适当增加功率控制的速度.方法:1.减小功率控制的响应时间BS(MS)_Pcon_ACK,以及功率控制的间隔时间BS(MS)_PCON_INT用来加快功率控制.一般在需要的小区内从6和2改到3和1.·参数BS(MS)_Pcon_ACK是在触发下一个功率控制命令前允许基站(手机)来确认功率控制命令的时间。
如果在该时间内没有回应则重发该功率控制命令。
•参数BS(MS)_PCON_INT是用来设定两次功率控制之间的最小时间间隔.功率控制过程从开始到功率控制的效果被检测到需要一定的时间。
因此,连续二次功率控制之间必须有一定的时间间隔,否则会导致系统的不稳定,甚至产生调话。
四.有关切换的参数1.控制切换的速度(频繁程度)对于环境复杂,信号变化快的地区,通常是市中心小区较密集的地方或者快速移动物体较多的地方,需要加快切换的速度,在信号还没有衰减到无法挽救的情况之前就切换,这样会明显减少C136掉话,相应的由于切换次数的增加,可能会引起C21掉话的增加,但只要总的掉话次数减少,说明加快切换次数是有必要的.可以修改的相应的参数:减小Handover Margin,可以降低成为候选小区的条件,增加可供切换的候选小区的个数.减小A_LEV_HO,A_QUAL_HO,A_PBGT_HO的值,通常由8,8,12改为6,6,8.也可视情况只改A_PBGT_HO.A_XXXX_HO是指用于电平切换,或质量切换,或功率预算切换的接收电平监测时,用来对测试报告中电平值做平均的窗口大小。
A_LEV_HO和A_QUAL_HO一般设置为8,微小区应适当减小,一般为6,对于市区基站较密集的地区还可减小2。
A_PBGT_HO一般设置为12,对于市区基站较密集的地区还可减小为8,微小区应适当减小,一般为8,基站密集地区为6。
为了防止过多的不必要的反复切换(乒乓切换)需要开启防止乒乓切换的PING_PONG_HCP和T_HCP.参数PING_PONG_HCP是用来防止乒乓切换而设置的惩罚电平值。
参数T_HCP是指防止乒乓切换机制中,乒乓阻隔的有效时间。
当切换发生后T_HCP 秒内,乒乓阻隔有效,否则无效。
另:当PING_PONG_HCP为0或T_HCP(阻隔时间)为0时,防止乒乓切换的机制相当于被关闭。
尽管两者都可关闭防乒乓切换机制,但应使用T_HCP。
2.控制切换的引发原因:一般来说,在引发切换的原因中,由于PBGT原因而产生的切换应该占整个切换中的大部分,因为PBGT切换引起的切换比LEV,QUAL原因引起的切换来的安全,掉话的可能性比较小.因此,察看计数器C71,C72,C73,C74,C78.如果发现C78(Better Cell HO)占的比例比较小,可以适当减小LEV切换的低门限值,使得LEV切换更困难,从而增加PBGT切换的比例.参数L_RXLEV_UL(DL)_H定义了上行(下行)接收电平门限,当基站接收的上行(下行)电平低于该门限值时,基站将启动切换算法。
一般上行设为-96dB,下行设为-91dB(下行比上行要高出5dB,因为在开启上下行功率控制后,根据信令跟踪的结果看,下行的接收电平一般比上行的接收电平高出5dB).对于G3BTS,由于接收灵敏度较高,一般上行设为-99dB,下行设为-94dB.3.对于同心圆小区:如果小区的一些频点受到干扰,可以将这些频点设置为内小区。